一种基于WiFi和IMU融合的室内定位方法
文献发布时间:2023-06-19 13:43:30
技术领域
本发明属于室内定位技术领域,具体地说涉及一种基于WiFi和IMU融合的室内定位方法。
背景技术
大型室内场景由于室内空间复杂多样,用户身处室内,如何做到实时定位,并了解周围场景是一个值得关注的问题。通常情况下,室内场景中会布置一些室内平面图来为行人提供位置指引。但是对于一些大型公共场景,由于其空间复杂,设施多样,即使提供平面图用户依然无法有效地定位自身位置。由于GPS无法在室内工作,因此许多基于其他信号源的室内定位技术被提出,如UWB定位、蓝牙定位、惯导定位、WiFi定位等。其中,WiFi的部署成本低廉、覆盖范围广、能提供绝对位置,但定位频率较低、定位精度较低,而IMU则能够提供高频率、高精度的相对位置估计,但是存在累积误差。
发明内容
本发明所要解决的技术问题是提供一种基于WiFi和IMU融合的室内定位方法,其利用WiFi和IMU两者互补,将两者进行融合,能够实现高精度高频率的绝对位置估计。
为解决上述问题,本发明的技术方案是:
一种基于WiFi和IMU融合的室内定位方法,包括如下步骤:
步骤一、离线采集WiFi信号强度构建原始无线地图;
步骤二、使用高斯过程回归对构建的原始无线地图进行拟合,训练得到符合真实信号分布的真实无线地图;
步骤三、实时获取周围WiFi节点的RSS数据,然后根据真实无线地图中的训练数据使用自适应K近邻算法获取WiFi节点的定位初值坐标;
步骤四、采用融合WiFi和IMU的粒子滤波对获取的定位初值坐标进行定位估计;
步骤五、计算步骤四采用融合定位得到的定位估计与使用自适应K近邻算法计算k时刻的WiFi节点的定位估计之间的定位误差,并判断该定位误差是否超过设定的误差阈值,若超过,则进行重定位,并选择融合定位得到的定位估计代替k时刻的WiFi节点的定位估计,以此为下一轮粒子滤波的定位初值。
作为本发明的一种优选改进,步骤一具体包括:离线阶段,在室内定位区域中预先布置M个WiFi节点,并对室内地图进行栅格化,将定位区域划分为N个栅格,每个栅格的坐标表示为z
作为本发明的一种优选改进,步骤二具体包括:
以RSS分布的对数衰减模型为先验,则先验分布可以表示为f(x)~N(μ
给定步骤一所建立的RSS观测数据(x*,y*),其中x*,y*分别表示栅格坐标和对应的RSS向量值;
通过假设y*与f(x)服从联合高斯分布,可以计算得到RSS的后验分布f*(x),从而得到更准确的RSS信号分布的无线地图。
作为本发明的一种优选改进,步骤三具体包括:
定位阶段,在线实时获取周围WiFI节点的RSS数据r
对差异度从小到大排序,设定差异度阈值d
根据计算得到的候选点坐标{(x
作为本发明的一种优选改进,步骤四具体包括:
粒子初始化,由定位初值坐标(x
重要性采样,考虑连续两帧WiFi信号帧k-1时刻到k时刻,对于所有粒子,根据两帧间采集到的IMU数据进行状态递推:
y
x
其中,位移s
通过高斯过程回归模型,计算出粒子所在位置的RSS预测值,根据k时刻实时采集到的RSS真实值,计算粒子的权重w
计算粒子的权重和sum(w
通过对粒子坐标按权重进行加权,更新k时刻的定位估计:
粒子重采样,对粒子集{(x
作为本发明的一种优选改进,步骤五具体包括:使用自适应K近邻算法计算k时刻的WiFi节点的定位估计
本发明与现有技术相比,具有如下有益效果:
1、使用高斯过程回归精细化原始无线地图,将离散的指纹数据库替换为WiFi节点的RSS信号强度分布模型,更好地拟合了真实的信号强度分布;
2、利用粒子滤波融合WiFi和IMU数据进行定位估计,并引入重定位机制抑制较大定位误差,提高了定位精度和频率。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图,其中:
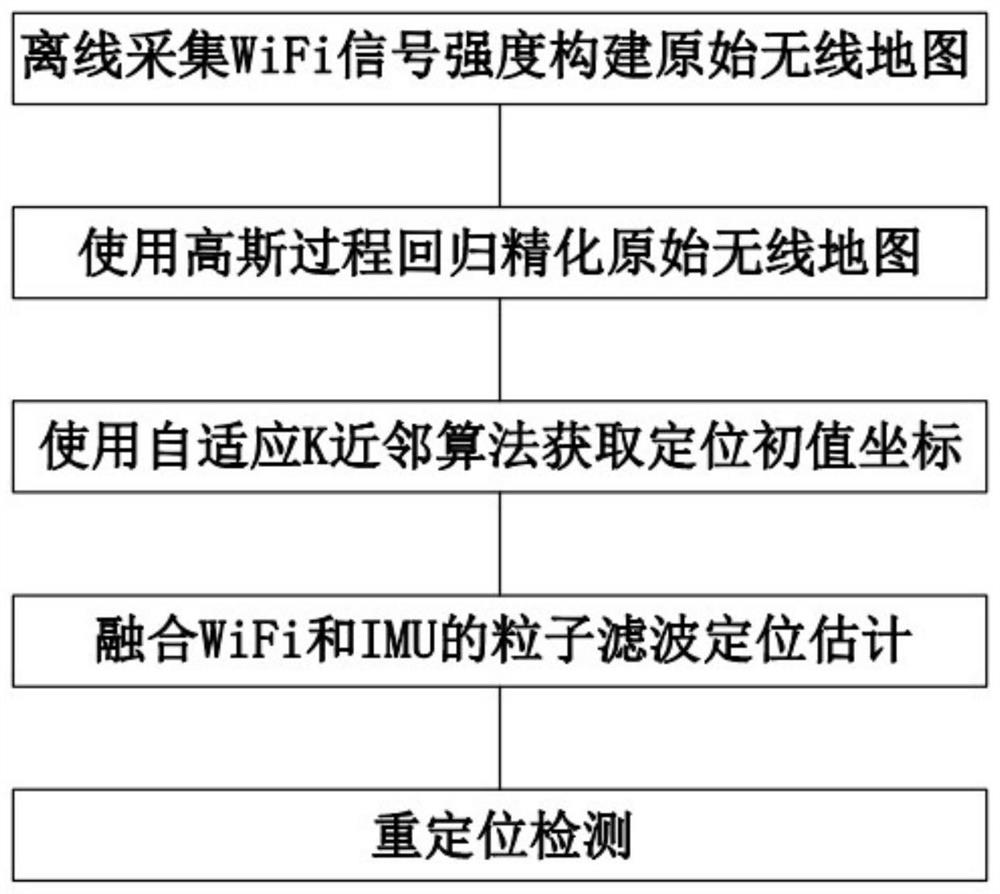
图1为本发明一种基于WiFi和IMU融合的室内定位方法的流程图。
具体实施方式:
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
请参阅图1所示,本发明提供了一种基于WiFi和IMU融合的室内定位方法,包括如下步骤:
步骤一、离线采集WiFi信号强度构建原始无线地图;
具体包括:离线阶段,在室内定位区域中预先布置M个WiFi节点,并对室内地图进行栅格化,将定位区域划分为N个栅格,每个栅格的坐标表示为z
步骤二、使用高斯过程回归对构建的原始无线地图进行拟合,训练得到符合真实信号分布的真实无线地图,这样获得的真实无线地图的分辨率更高,特征更精确;
具体包括:以RSS分布的对数衰减模型为先验,则先验分布可以表示为f(x)~N(μ
给定步骤一所建立的RSS观测数据(x*,y*),其中x*,y*分别表示栅格坐标和对应的RSS向量值;
通过假设y*与f(x)服从联合高斯分布,可以计算得到RSS的后验分布f*(x),从而得到更准确的RSS信号分布的无线地图。
步骤三、实时获取周围WiFi节点的RSS数据,然后根据真实无线地图中的训练数据使用自适应K近邻算法获取WiFi节点的定位初值坐标;
具体包括:定位阶段,在线实时获取周围WiFI节点的RSS数据r
对差异度从小到大排序,设定差异度阈值d
根据计算得到的候选点坐标{(x
步骤四、采用融合WiFi和IMU的粒子滤波对获取的定位初值坐标进行定位估计;
具体包括:粒子初始化,由定位初值坐标(x
重要性采样,考虑连续两帧WiFi信号帧k-1时刻到k时刻,对于所有粒子,根据两帧间采集到的IMU数据进行状态递推:
y
x
其中,位移s
通过高斯过程回归模型,计算出粒子所在位置的RSS预测值,根据k时刻实时采集到的RSS真实值,计算粒子的权重w
计算粒子的权重和sum(w
通过对粒子坐标按权重进行加权,更新k时刻的定位估计:
粒子重采样,对粒子集{(x
步骤五、计算步骤四采用融合定位得到的定位估计与使用自适应K近邻算法计算k时刻的WiFi节点的定位估计之间的定位误差,并判断该定位误差是否超过设定的误差阈值,若超过,则进行重定位,并选择融合定位得到的定位估计代替k时刻的WiFi节点的定位估计,以此为下一轮粒子滤波的定位初值。
具体包括:使用自适应K近邻算法计算k时刻的WiFi节点的定位估计
本发明与现有技术相比,具有如下有益效果:
1、使用高斯过程回归精细化原始无线地图,将离散的指纹数据库替换为WiFi节点的RSS信号强度分布模型,更好地拟合了真实的信号强度分布;
2、利用粒子滤波融合WiFi和IMU数据进行定位估计,并引入重定位机制抑制较大定位误差,提高了定位精度和频率。
本说明书中所描述的以上内容仅仅是对本发明所作的举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种修改或补充或采用类似的方式替代,只要不偏离本发明说明书的内容或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。