机器人的返回充电桩的方法、装置、机器人及存储介质
文献发布时间:2023-06-19 19:14:59
技术领域
本发明涉及机器人技术领域,尤其涉及一种机器人的返回充电桩的方法、装置、机器人及存储介质。
背景技术
随着机器人技术的日趋成熟,机器人的应用场景也越来越广泛,例如:用于送餐的送餐机器人、用于环境清洁的扫地机器人、割草机等。由于机器人在各个领域发挥着越来越重要的作用,大众对机器人的智能化需求也越来越高。
近年来,机器人的自主巡线功能成为了研究的热点。相关技术中,在机器人工作完没电或者工作过程中需要返回充电桩时,通常使用激光以及测量距离和测量位置传感器组合的方式,来实现机器人自动巡线回桩。但是,这种方式,使用到的传感器种类和数量较多,硬件设计制作成本和软件设计成本均比较高,并且,当一种传感器异常或者机器人受到外界干扰时,容易发生自动回桩失败的情况,回桩成功率低。
发明内容
本发明旨在至少在一定程度上解决相关技术中的技术问题之一。
为此,本发明的第一个目的在于提出一种机器人的返回充电桩的方法,以解决相关技术中的机器人自动巡线回桩的方式存在的硬件设计制作成本和软件设计成本均比较高,且回桩成功率低的问题。
本发明的第二个目的在于提出一种机器人的返回充电桩的装置。
本发明的第三个目的在于提出一种机器人。
本发明的第四个目的在于提出一种计算机可读存储介质。
为达上述目的,本发明第一方面实施例提出了一种机器人的返回充电桩的方法,所述机器人的第一端中间位置设置有第一电感器、第二电感器和第三电感器;所述第一电感器垂直于地面设置;所述第二电感器和所述第三电感器平行于地面设置,且横向对称地设置在所述第一电感器的两侧,所述充电桩上设置有对称设置的第一通电线圈和第二通电线圈,所述方法,包括:根据所述第一电感器对所述第一通电线圈和所述第二通电线圈的感应数据,控制所述机器人运行到所述第一电感器位于所述第一通电线圈和所述第二通电线圈之间的中线上的中间位置;根据所述第二电感器对所述第一通电线圈的感应数据以及所述第三电感器对所述第二通电线圈的感应数据,确定所述第二电感器和所述第一通电线圈之间的第一距离以及所述第三电感器与所述第二通电线圈之间的第二距离;以及根据所述第一距离和所述第二距离,控制所述机器人从所述中间位置返回所述充电桩。
本发明实施例提出的机器人的返回充电桩的方法,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离,根据第一距离和第二距离,控制机器人从中间位置返回充电桩。由于仅根据电感器对通电线圈的感应数据,即可实现机器人的自主回桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且回桩成功率高。
根据本发明的一个实施例,所述根据所述第一电感器对所述第一通电线圈和所述第二通电线圈的感应数据,控制所述机器人运行到所述第一电感器位于所述第一通电线圈和所述第二通电线圈之间的中线上的中间位置,包括:在确定所述第一电感器位于所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域,且根据所述第一距离和所述第二距离确定所述机器人满足预设回桩条件时,控制所述机器人向靠近所述中间位置的方向旋转至所述中间位置。
根据本发明的一个实施例,所述根据所述第一电感器对所述第一通电线圈和所述第二通电线圈的感应数据,控制所述机器人运行到所述第一电感器位于所述第一通电线圈和所述第二通电线圈之间的中线上的中间位置,包括:在确定所述第一电感器位于所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域,且根据所述第一距离和所述第二距离确定所述机器人不满足预设回桩条件时,控制所述机器人:第一步:向靠近所述中间位置的方向旋转至所述中间位置或者所述充电桩外;第二步:前进预设距离并向靠近所述中间位置的方向旋转至所述中间位置;第三步:在确定所述机器人满足预设的后退条件时,后退出所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域,并再次进入所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域;第四步:重复所述第一步至第三步直到不满足所述后退条件。
根据本发明的一个实施例,所述后退条件包括:后退次数小于等于预设次数阈值,和/或,所述第一距离或者所述第二距离小于等于第一预设距离阈值。
根据本发明的一个实施例,所述预设回桩条件包括:所述机器人与所述中间位置之间的角度小于等于预设角度阈值,和/或,所述第一距离和所述第二距离小于第二预设距离阈值;其中,所述机器人与所述中间位置之间的角度的确定方式为,根据所述第一距离、所述第二距离、以及所述第二电感器和所述第三电感器之间的距离,确定所述第二电感器和所述第三电感器的连线与所述中间位置之间的角度;根据预设角度数值、以及所述连线与所述中间位置之间的角度,确定所述机器人与所述中间位置之间的角度。
根据本发明的一个实施例,所述根据所述第一距离和所述第二距离,控制所述机器人从所述中间位置返回所述充电桩,包括:控制所述机器人前进,并获取所述第一距离和所述第二距离的差值;根据所述差值确定所述机器人的旋转角度;控制所述机器人旋转所述旋转角度。
根据本发明的一个实施例,所述第一通电线圈和所述第二通电线圈的通电电流的数值相同,且所述第一通电线圈和所述第二通电线圈的通电电流的方向相反。
根据本发明的一个实施例,所述机器人为割草机。
为达上述目的,本发明第二方面实施例提出了一种机器人的返回充电桩的装置,所述机器人的第一端中间位置设置有第一电感器、第二电感器和第三电感器;所述第一电感器垂直于地面设置;所述第二电感器和所述第三电感器平行于地面设置,且横向对称地设置在所述第一电感器的两侧,所述充电桩上设置有对称设置的第一通电线圈和第二通电线圈,所述装置,包括:第一控制模块,用于根据所述第一电感器对所述第一通电线圈和所述第二通电线圈的感应数据,控制所述机器人运行到所述第一电感器位于所述第一通电线圈和所述第二通电线圈之间的中线上的中间位置;确定模块,用于根据所述第二电感器对所述第一通电线圈的感应数据以及所述第三电感器对所述第二通电线圈的感应数据,确定所述第二电感器和所述第一通电线圈之间的第一距离以及所述第三电感器与所述第二通电线圈之间的第二距离;以及第二控制模块,用于根据所述第一距离和所述第二距离,控制所述机器人从所述中间位置返回所述充电桩。
本发明实施例提出的机器人的返回充电桩的装置,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离,根据第一距离和第二距离,控制机器人从中间位置返回充电桩。由于仅根据电感器对通电线圈的感应数据,即可实现机器人的自主回桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且回桩成功率高。
根据本发明的一个实施例,所述第一控制模块,具体用于:在确定所述第一电感器位于所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域,且根据所述第一距离和所述第二距离确定所述机器人满足预设回桩条件时,控制所述机器人向靠近所述中间位置的方向旋转至所述中间位置。
根据本发明的一个实施例,所述第一控制模块,具体还用于:在确定所述第一电感器位于所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域,且根据所述第一距离和所述第二距离确定所述机器人不满足预设回桩条件时,控制所述机器人:第一步:向靠近所述中间位置的方向旋转至所述中间位置或者所述充电桩外;第二步:前进预设距离并向靠近所述中间位置的方向旋转至所述中间位置;第三步:在确定所述机器人满足预设的后退条件时,后退出所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域,并再次进入所述第一通电线圈的覆盖区域或者所述第二通电线圈的覆盖区域;第四步:重复所述第一步至第三步直到不满足所述后退条件。
根据本发明的一个实施例,所述后退条件包括:后退次数小于等于预设次数阈值,和/或,所述第一距离或者所述第二距离小于等于第一预设距离阈值。
根据本发明的一个实施例,所述预设回桩条件包括:所述机器人与所述中间位置之间的角度小于等于预设角度阈值,和/或,所述第一距离和所述第二距离小于第二预设距离阈值;其中,所述机器人与所述中间位置之间的角度的确定方式为,根据所述第一距离、所述第二距离、以及所述第二电感器和所述第三电感器之间的距离,确定所述第二电感器和所述第三电感器的连线与所述中间位置之间的角度;根据预设角度数值、以及所述连线与所述中间位置之间的角度,确定所述机器人与所述中间位置之间的角度。
根据本发明的一个实施例,所述第二控制模块,具体用于:控制所述机器人前进,并获取所述第一距离和所述第二距离的差值;根据所述差值确定所述机器人的旋转角度;控制所述机器人旋转所述旋转角度。
根据本发明的一个实施例,所述第一通电线圈和所述第二通电线圈的通电电流的数值相同,且所述第一通电线圈和所述第二通电线圈的通电电流的方向相反。
根据本发明的一个实施例,所述机器人为割草机。
为达上述目的,本发明第三方面实施例提出了一种机器人,机器人的第一端中间位置设置有第一电感器、第二电感器和第三电感器;所述第一电感器垂直于地面设置;所述第二电感器和所述第三电感器平行于地面设置,且横向对称地设置在所述第一电感器的两侧,所述机器人还包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行第一方面实施例所述的机器人的返回充电桩的方法。
为达上述目的,本发明第四方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明第一方面实施例所述的机器人的返回充电桩的方法。
附图说明
图1是本申请实施例提供的机器人中的电感器的布局示意图;
图2是本申请实施例提供的机器人中的电感器的另一布局示意图;
图3是本申请实施例提供的电感器与机器人中的处理器的连接关系示意图;
图4是本申请实施例提供的电感器与机器人中的处理器的另一连接关系示意图;
图5是本申请实施例提供的第二电感器和第一通电线圈的第一距离以及第三电感器和第二通电线圈之间的第二距离的示意图;
图6是根据本申请实施例提供的一种机器人的返回充电桩的方法的流程图;
图7是根据本申请实施例提供的一种在充电桩上布设通电线圈的示意图;
图8是根据本申请实施例提供的另一种机器人的返回充电桩的方法的流程图;
图9是根据本申请实施例提供的充电桩的各区域示意图;
图10是本申请实施例提供的另一种机器人的返回充电桩的方法的流程图;
图11-15为本申请实施例提供的机器人与充电桩之间的位置关系示意图;
图16为控制机器人从中间位置返回充电桩的流程图;
图17是根据本申请实施例提供的另一种机器人的返回充电桩的方法的流程图;
图18是本申请实施例提供的另一种机器人的返回充电桩的方法的流程图;
图19-26为本申请实施例提供的机器人与充电桩之间的位置关系示意图;
图27是本申请实施例提供的一种机器人的返回充电桩的装置的结构图;
图28是本申请实施例提供的一种机器人的结构图。
具体实施方式
下面详细描述本发明的实施例,实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
相关技术中,在机器人工作完没电或者工作过程中需要返回充电桩时,通常使用激光以及测量距离和测量位置传感器组合的方式,来实现机器人自动巡线回桩。但是,这种方式,使用到的传感器种类和数量较多,硬件设计制作成本和软件设计成本均比较高,并且,当一种传感器异常或者机器人受到外界干扰时,容易发生自动回桩失败的情况,回桩成功率低。
本申请各实施例主要针对上述现有技术中存在的技术问题,提出一种机器人的返回充电桩的方法、装置、机器人以及存储介质,其中,机器人的第一端中间位置设置有第一电感器、第二电感器和第三电感器;第一电感器垂直于地面设置;第二电感器和第三电感器平行于地面设置,且横向对称地设置在第一电感器的两侧,充电桩上设置有对称设置的第一通电线圈和第二通电线圈,机器人在回桩时,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离,进而根据第一距离和第二距离,控制机器人从中间位置返回充电桩。由于仅根据电感器对通电线圈的感应数据,即可实现机器人的自主回桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且回桩成功率高。
下面结合附图来描述本发明实施例的机器人的返回充电桩的方法、装置、机器人及存储介质。
为清楚说明本申请实施例的机器人的返回充电桩的方法、装置、机器人及存储介质,首先结合附图1-5,对机器人上设置的电感器进行说明。
图1是本申请实施例提供的机器人中的电感器的布局示意图,图2是本申请实施例提供的机器人中的电感器的另一布局示意图。其中,图1为俯视图,图2为正视图(机器人2在图2中未示出)。
如图1和图2所示,机器人2的第一端中间位置可以设置第一电感器11、第二电感器12和第三电感器13。
其中,第一电感器11垂直于地面设置,感应得到的感应数据用于确定第一电感器11与通电线圈的内外侧关系;
第二电感器12和第三电感器13平行于地面设置,且第二电感器12和第三电感器13横向对称地设置在第一电感器11的两侧,第二电感器12感应得到的感应数据用于确定第二电感器12与通电线圈之间的距离关系,第三电感器13感应得到的感应数据用于确定第三电感器13与通电线圈之间的距离关系。
其中,第一电感器11、第二电感器12以及第三电感器13可以为自感器。
可以理解的是,通电线圈可以按照预设方式设置。在示例性实施例中,通电线圈相对于地面水平设置,并且,通电线圈通有特定频率的电流信号,比如,20KHZ(千赫兹)的PWM波信号,从而在通电线圈所在区域可以产生磁场。在示例性实施例中,机器人2为割草机时,水平设置的通电线圈可以是割草区域的边界引导线所围成的通电线圈,或者,也可以是设置在充电桩底盘上的通电线圈,其中,通电线圈可以设置在充电桩底盘的上表面或者下表面,本申请对此不作限制。
第一电感器11垂直于地面设置,当第一电感器11在水平设置的通电线圈附近时,可以感应到通电线圈产生的磁场,并且产生感应数据,由于第一电感器11位于通电线圈内侧和外侧时,感应数据比如电压信号的大小不同,从而根据第一电感器11感应得到的感应数据,即可确定第一电感器11与水平设置的通电线圈的内外侧关系。本申请实施例以通电线圈为水平设置的通电线圈为例进行说明。
另外,第二电感器12和第三电感器13平行于地面设置,并且横向对称设置在第一电感器11的两侧。以第二电感器12为例,当第二电感器12在通电线圈附近时,第二电感器12可以感应到通电线圈产生的磁场,并且可以产生感应数据。由于第二电感器12与通电线圈之间的距离不同时,该第二电感器12产生的感应数据比如电压信号的大小不同,从而根据该第二电感器12感应得到的感应数据,可以确定该第二电感器12与通电线圈之间的距离关系。同理,根据第三电感器13感应得到的感应数据,可以确定第三电感器13与通电线圈之间的距离关系。
在示例性实施例中,如图1和图2所示,可以将第二电感器12和第三电感器13设置在电路板14上。其中,第一电感器11垂直于电路板14设置在电路板14中部,第二电感器12和第三电感器13平行于电路板14设置,且第二电感器12和第三电感器13横向对称设置在第一电感器11的两侧。
在机器人2利用电感器返回充电桩时,可以将电路板14平行于地面设置在机器人2上,从而使第一电感器11垂直于地面,第二电感器12和第三电感器13平行于地面,以保证第一电感器11能够感应到感应数据,第二电感器12能够感应到感应数据,第三电感器13能够感应到感应数据。
在示例性实施例中,第一电感器11、第二电感器12和第三电感器13可以设置在机器人2第一端的中间位置,其中,第一端可以为机器人2的前端,从而机器人2可以根据第一电感器11对通电线圈的感应数据,确定第一电感器11与通电线圈的内外侧关系,并且根据第二电感器12对通电线圈的感应数据,确定第二电感器与通电线圈之间的距离关系,根据第三电感器13对通电线圈的感应数据,确定第三电感器与通电线圈之间的距离关系,进而根据第一电感器11与通电线圈的内外侧关系、第二电感器12和第三电感器13分别与通电线圈之间的距离关系,控制机器人2返回充电桩。其中,在机器人2第一端中间位置设置第一电感器11、第二电感器12和第三电感器13时,可以将第一电感器11、第二电感器12和第三电感器13放置在机器人2前端中间位置的上表面上,或者水平粘贴在机器人2前端中间位置的侧面上,本申请实施例对此不作限制。
具体的,机器人2中可以设置有处理器21,从而通过处理器21,根据第一电感器11采集到的感应数据、第二电感器12采集到的感应数据以及第三电感器13采集到的感应数据,确定机器人2相对充电桩的相对位置关系,以控制机器人2准确返回充电桩。
如图3所示,第一电感器11可以与处理器21连接,从而第一电感器11可以将采集到的感应数据传输至处理器21,以使处理器21根据感应数据,确定第一电感器11与通电线圈的内外侧关系。第二电感器12以及第三电感器13可以分别与处理器21连接,从而第二电感器12和第三电感器13可以分别将采集到的感应数据传输至处理器21,以使处理器21根据第二电感器12传输的感应数据确定第二电感器12与通电线圈之间的距离关系,根据第三电感器13传输的感应数据确定第三电感器13与通电线圈之间的距离关系。处理器21根据第一电感器11与通电线圈的内外侧关系,以及第二电感器12和第三电感器13分别与通电线圈之间的距离关系,即可控制机器人2返回充电桩。
在示例性实施例中,如图4所示,还可以在机器人2上设置中间电路23,第一电感器11与处理器21通过中间电路23连接。其中,图3和图4中24为机器人2的驱动轮。
其中,中间电路23可以包括放大电路231和比较电路232,放大电路231分别与第一电感器11和比较电路232连接,放大电路231可以对第一电感器11上产生的感应数据进行放大处理,比较电路232与处理器21连接,比较电路232可以按照预设电压阈值对放大处理后的感应数据进行方波处理,并提供给处理器21。由于第一电感器11位于通电线圈内侧和外侧时,进行方波处理后的感应数据的占空比不同,从而处理器21可以根据感应数据的占空比,确定第一电感器11位于通电线圈内侧还是外侧。
其中,预设电压阈值,可以根据需要设置,本申请实施例对此不作限制。
需要说明的是,在示例性实施例中,通电线圈的数量可以根据需要设置,比如可以在充电桩区域设置一个通电线圈,也可以在充电桩区域对称设置两个通电线圈,本申请对此不作限制。
在通电线圈的数量为一个时,可以根据第一电感器11对该通电线圈的感应数据,确定第一电感器11与该通电线圈的内外侧关系,可以分别根据第二电感器12和第三电感器13对该通电线圈的感应数据,确定第二电感器12和第三电感器13与该通电线圈之间的距离关系。
在通电线圈的数量为多个时,可以根据第一电感器11对多个通电线圈的感应数据,确定第一电感器11与多个通电线圈的内外侧关系,根据第二电感器12对某个通电线圈的感应数据,确定第二电感器12与该个通电线圈之间的距离,根据第三电感器13对某个通电线圈的感应数据,确定第三电感器13与该个通电线圈之间的距离。
以图5为例,假设第一电感器11、第二电感器12和第三电感器13设置在机器人2前端的中间位置,图5中虚线31和32为充电桩上水平设置的通电线圈。其中,假设在充电桩上对称设置了左右两个通电线圈,其中左侧通电线圈31为第一通电线圈,右侧通电线圈32为第二通电线圈,两个通电线圈不共用线段,且通电电流数值相同,方向相反。其中,由于两个通电线圈在充电桩的中间区域的通电线的位置较近,因此图5中仅以一条虚线为例进行示意。
根据第一电感器11对第一通电线圈和第二通电线圈的感应数据,可以确定第一电感器11与第一通电线圈和第二通电线圈的内外侧关系。根据第二电感器12对第一通电线圈的感应数据,可以确定第二电感器12与第一通电线圈之间的距离。根据第三电感器13对第二通电线圈的感应数据,可以确定第三电感器13与第二通电线圈之间的距离。
其中,本申请实施例中,第二电感器12与通电线圈之间的距离,具体可以为第二电感器12至通电线圈的通电线之间的最短距离,第三电感器13与通电线圈之间的距离,具体可以为第三电感器13至通电线圈的通电线的最短距离。
参考图5,由于第二电感器12至第一通电线圈与第二通电线之间的中间区域的通电线的距离最短,则第二电感器12与第一通电线圈之间的距离,可以为图5中的第二电感器12至第一通电线圈和第二通电线圈之间的中间区域的通电线的垂直距离A。由于第三电感器13至第一通电线圈与第二通电线之间的中间区域的通电线的距离最短,则第三电感器13与第二通电线圈之间的距离,可以为图5中的第三电感器13至第一通电线圈和第二通电线圈之间的中间区域的通电线的垂直距离B。需要说明的是,由于第一通电线圈和第二通电线圈在作业区域的中间区域的通电线的位置较近,第二电感器12与第一通电线圈之间的距离也可以理解为第二电感器12至第一通电线圈和第二通电线圈之间的中线的垂直距离,第三电感器13与第二通电线圈之间的距离也可以理解为第三电感器13至第一通电线圈和第二通电线圈之间的中线的垂直距离。
可以理解的是,在第一电感器11和第二电感器12之间的距离以及第一电感器11和第三电感器13之间的距离过小时,则第二电感器12采集的感应数据与第三电感器13采集的感应数据的差值很小,第二电感器12和第三电感器13分别与通电线圈之间的距离的差值也很小,从而无法根据第二电感器12与通电线圈之间的距离以及第三电感器13与通电线圈之间的距离,准确确定机器人2相对充电桩的相对位置关系,以控制机器人2准确返回充电桩。因此,本申请实施例中,第一电感器11与第二电感器12之间的距离以及第一电感器11与第三电感器13之间的距离需大于等于预设阈值,以使机器人2利用电感器进行自主回桩时,能够准确确定机器人2与充电桩的相对位置关系。
其中,预设阈值,可以根据需要设置,本申请实施例对此不作限制。
下面结合图6,对本申请实施例提供的机器人的返回充电桩的方法进行详细说明。
图6是根据本申请实施例提供的一种机器人的返回充电桩的方法的流程图。
其中,本申请实施例提供的机器人的返回充电桩的方法,可以由本申请实施例提供的机器人的返回充电桩的装置以下简称回桩装置执行,其中,该回桩装置,可以被配置在机器人中,以实现机器人的自主巡线返回充电桩。在示例性实施例中,回桩装置可以为机器人中的处理器。
机器人,可以是割草机、扫地机等任意类型的机器人,本申请实施例对此不作限制。
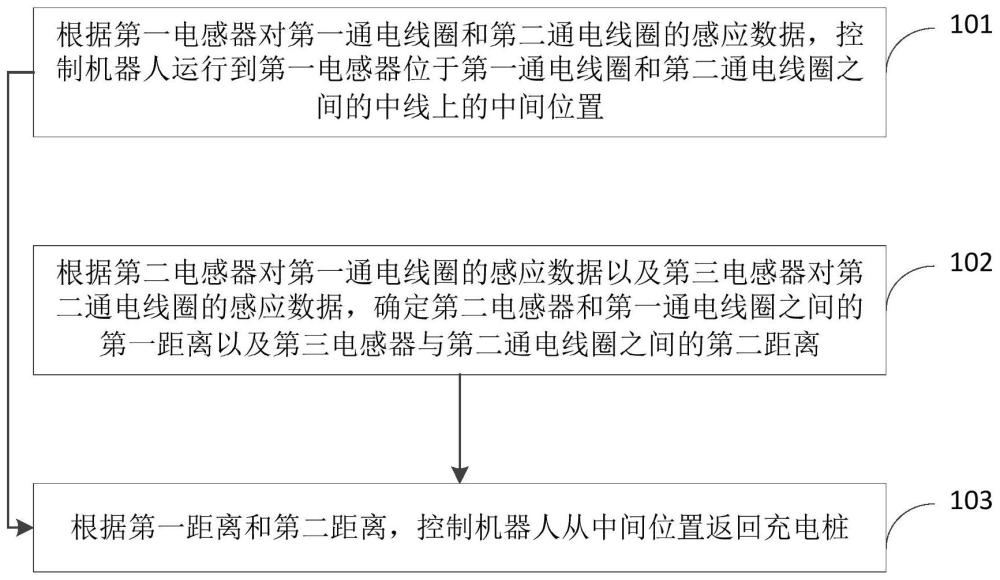
如图6所示,本申请实施例提供的机器人的返回充电桩的方法包括以下步骤:
步骤101,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置。
具体的,机器人的第一端中间位置设置有第一电感器、第二电感器和第三电感器,第一电感器垂直于地面设置,第二电感器和第三电感器平行于地面设置,且横向对称地设置在第一电感器的两侧。
充电桩上设置有对称设置的通电线圈,可以在充电桩区域产生磁场。在示例性实施例中,通电线圈在充电桩上的布设方式可以为图7所示的方式。需要说明的是,充电桩包括底盘,通电线圈具体可以设置在底盘的上表面或者下表面。
如图7所示,可以在充电桩3的左半区域布设第一通电线圈31,在充电桩3的右半区域布设第二通电线圈32,第一通电线圈31和第二通电线圈32对称,第一通电线圈31和第二通电线圈32的通电电流的数值相同,且第一通电线圈31和第二通电线圈32的通电电流的方向相反。需要说明的是,由于第一通电线圈31和第二通电线圈32在充电桩的中间区域的通电线的位置较近,因此本申请实施例的附图中仅以一条虚线为例进行示意。本申请实施例中以图7所示的通电线圈在充电桩上的布设方式为例进行说明。
其中,中间位置位于第一通电线圈和第二通电线圈之间的中线上,可以为充电桩区域内第一通电线圈和第二通电线圈之间的中线所在区域的任意位置。
可以理解的是,第一通电线圈和第二通电线圈可以在充电桩区域产生磁场,本申请实施例中,可以根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置。
步骤102,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离。
可以理解的是,在机器人行进过程中,可以根据第二电感器对第一通电线圈感应得到的感应数据,实时确定第二电感器与第一通电线圈之间的第一距离,根据第三电感器对第二通电线圈感应得到的感应数据,实时确定第三电感器与第二通电线圈之间的第二距离。
其中,第二电感器和第一通电线圈之间的第一距离,为第二电感器至第一通电线圈的最短距离;第三电感器与第二通电线圈之间的第二距离,为第三电感器至第二通电线圈的最短距离。
需要说明的是,在以图7所示的方式布设通电线圈时,若第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,则如图5所示,此时第一距离为第二电感器至第一通电线圈和第二通电线圈之间的中线的垂直距离,第二距离为第三电感器至第一通电线圈和第二通电线圈之间的中线的垂直距离。
本申请实施例中,步骤101和102可以同时执行,也可以先执行步骤101再执行步骤102,或者先执行步骤102再执行步骤101,本申请对步骤101和102的执行时机不作限制。
步骤103,根据第一距离和第二距离,控制机器人从中间位置返回充电桩。
可以理解的是,以图7所示的方式在充电桩上布设通电线圈时,在机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置时,可以从中间位置返回充电桩,并且在返回充电桩的过程中,可以通过调整机器人的位姿,使机器人始终巡充电桩的中间区域的通电线行进,直至回桩到位。
具体实现时,回桩装置在机器人从中间位置返回充电桩的过程中,可以根据第一距离和第二距离,实时调整机器人的位姿,实现机器人巡中间区域的通电线进行精准回桩。
上述机器人的返回充电桩的方法,由于仅利用电感器的感应数据,即可实现机器人返回充电桩,降低了硬件设计复杂度和软件算法复杂度,且不需要用户布置长引导线即可实现机器人的精准回桩,节省了用户负担和使用成本。并且,由于利用电感器的感应数据可以准确确定机器人相对充电桩的相对位置关系,从而能够实现机器人的准确巡线,进而控制机器人准确返回充电桩,且回桩过程不易受光线等外界干扰,提高了回桩成功率。
本申请实施例提供的机器人的返回充电桩的方法,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离,进而根据第一距离和第二距离,控制机器人从中间位置返回充电桩。由于仅根据电感器对通电线圈的感应数据,即可实现机器人的自主回桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且回桩成功率高。
下面结合图8,对本申请实施例提供的机器人的返回充电桩的方法进行进一步说明。
图8是根据本申请实施例提供的另一种机器人的返回充电桩的方法的流程图。其中,本申请实施例中以图7所示的通电线圈在充电桩上的布设方式为例进行说明。
如图8所示,本申请实施例提供的机器人的返回充电桩的方法,可以包括以下步骤:
步骤201,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离。
具体的,在机器人返回充电桩时,可以在机器人的前进过程中,实时根据第二电感器对第一通电线圈的感应数据,确定第二电感器与第一通电线圈之间的第一距离,根据第三电感器对第二通电线圈的感应数据,确定第三电感器与第二通电线圈之间的第二距离。并且,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,确定第一电感器分别与第一通电线圈和第二通电线圈的内外侧关系。
步骤202,在确定第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,且根据第一距离和第二距离确定机器人满足预设回桩条件时,控制机器人向靠近中间位置的方向旋转至中间位置。
步骤203,根据第一距离和第二距离,控制机器人从中间位置返回充电桩。
具体的,在机器人前进过程中,可以先根据第一电感器对第一通电线圈和第二通电线圈的感应数据,确定第一电感器分别与第一通电线圈和第二通电线圈的内外侧关系,进而根据第一电感器分别与第一通电线圈和第二通电线圈的内外侧关系、第一距离和第二距离,确定第一电感器位于哪个区域。其中,第一电感器位于的区域,可以包括充电桩区域和非充电桩区域,其中,充电桩区域包括第一通电线圈的覆盖区域、第二通电线圈的覆盖区域、第一通电线圈和第二通电线圈之间的中线所在区域。
以图7所示的方式布设通电线圈时,第一通电线圈的覆盖区域可以为图9所示的区域A’,第二通电线圈的覆盖区域可以为图9所示的区域C’,第一通电线圈和第二通电线圈之间的中线所在区域可以为图9所示的区域B’,非充电桩区域为区域A’、B’、C’之外的区域。其中,图9中a为第二通电线圈的覆盖区域的边界,b为第二通电线圈的边界,c为充电桩的托板边界。
在示例性实施例中,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,确定第一电感器位于第一通电线圈或第二通电线圈上,或者第一电感器位于第一通电线圈和第二通电线圈外侧,且第一距离和第二距离均小于第三预设距离阈值时,可以确定第一电感器位于第一通电线圈和第二通电线圈之间的中线所在区域;确定第一电感器位于第一通电线圈和第二通电线圈外侧,且第一距离和第二距离均大于等于第三预设距离阈值时,可以确定第一电感器位于非充电桩区域;确定第一电感器位于第一通电线圈内侧、第二通电线圈外侧时,可以确定第一电感器位于第一通电线圈的覆盖区域;确定第一电感器位于第二通电线圈内侧、第一通电线圈外侧时,可以确定第一电感器位于第二通电线圈的覆盖区域。其中,第三预设距离阈值,可以根据需要设置,本申请实施例对此不作限制。
在示例性实施例中,当机器人从第一电感器位于非充电桩区域切换至第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域时,回桩装置可以根据第一距离和第二距离判断机器人是否满足预设回桩条件。
其中,预设回桩条件用于判断控制机器人通过一次旋转运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置之后控制机器人从中间位置返回充电桩,还是通过多次调整机器人位姿,将机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置后控制机器人从中间位置返回充电桩。在机器人满足预设回桩条件时,控制机器人向靠近中间位置的方向旋转至中间位置后,即可控制机器人从中间位置返回充电桩。在机器人不满足预设回桩条件时,通过多次调整机器人位姿,将机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,再控制机器人从中间位置返回充电桩。
在示例性实施例中,预设回桩条件可以包括:机器人与中间位置之间的角度小于等于预设角度阈值,和/或,第一距离和第二距离小于第二预设距离阈值。
其中,预设角度阈值和第二预设距离阈值,可以根据需要设置,此处不作限制。
其中,机器人与中间位置之间的角度的确定方式为,根据第一距离、第二距离、以及第二电感器和第三电感器之间的距离,确定第二电感器和第三电感器的连线与中间位置之间的角度;根据预设角度数值、以及连线与中间位置之间的角度,确定机器人与中间位置之间的角度。
其中,机器人与中间位置之间的角度,可以理解为机器人的纵向对称中线与第一通电线圈和第二通电线圈之间的中线之间的角度。其中,此处的纵向可以为与第二电感器和第三电感器的连线垂直的方向。
其中,预设角度数值,可以为90度。
具体的,预设角度数值、第二电感器和第三电感器的连线与中间位置之间的角度值,这两个角度值作差,即可得到机器人与中间位置之间的角度。
可以理解的是,机器人与中间位置之间的角度小于等于预设角度阈值时,表示机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角度较小,此时,控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,再控制机器人从中间位置返回充电桩,即可实现机器人精准返回充电桩。第二电感器与第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离均小于第二预设距离阈值时,表示第一电感器至第一通电线圈和第二通电线圈之间的中线的距离较小,此时,控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,再控制机器人从中间位置返回充电桩,也可以实现机器人精准返回充电桩。机器人与中间位置之间的角度小于等于预设角度阈值,且第二电感器与第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离均小于第二预设距离阈值时,表示机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角度较小,且第一电感器至第一通电线圈和第二通电线圈之间的中线的距离较小,此时,控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,再控制机器人从中间位置返回充电桩,也可以实现机器人精准返回充电桩。
在示例性实施例中,在机器人满足预设回桩条件时,为了控制机器人旋转到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,在第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域时,可以控制机器人向靠近中间位置的方向旋转至中间位置。其中,在第一电感器位于第一通电线圈的覆盖区域时,可以控制机器人右转,直至第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,停止旋转;在第一电感器位于第二通电线圈的覆盖区域时,可以控制机器人左转,直至第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,停止旋转。
需要说明的是,在控制机器人向靠近中间位置的方向旋转至中间位置时,可能出现第一电感器切换至非充电桩区域的情况,此时表示机器人离充电桩还有一段距离,此时可以控制机器人前进,然后在机器人前进至第一电感器的所属区域从非充电桩区域切换到充电桩区域时,再继续重复执行步骤202-203。
在示例性实施例中,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置后,即可根据第一距离和第二距离,控制机器人从中间位置返回充电桩。
在示例性实施例中,存在机器人直接从第一电感器位于非充电桩区域的位置运行至第一电感器位于第一通电线圈和第二通电线圈之间中线上的中间位置的情况,此时,可以直接根据第一距离和第二距离,控制机器人从中间位置返回充电桩。
具体根据第一距离和第二距离控制机器人从中间位置返回充电桩时,可以采用下面的方法:控制机器人前进,并获取第一距离和第二距离的差值;根据差值确定机器人的旋转角度;控制机器人旋转该旋转角度。
具体的,可以控制机器人前进,并在前进的过程中,获取第一距离和第二距离的差值,并根据差值确定机器人的旋转角度,控制机器人旋转该旋转角度,再控制机器人前进。由此,通过在前进过程中,实时根据第一距离和第二距离的差值,控制机器人旋转,即可实现机器人巡中间位置的通电线精准的返回充电桩。
其中,旋转角度,可以为机器人旋转至第一距离和第二距离的差值为0或者小于预设差值阈值时所需旋转的角度。该旋转角度可以通过实时计算获取,也可以通过预先确定不同距离差值与旋转角度的对应关系,进而回桩装置在获取第一距离和第二距离的差值后,根据获取的第一距离和第二距离的差值从预先确定的对应关系获取,也可以通过其它方式获取,本申请实施例对此不作限制。
在示例性实施例中,可以利用PID(Proportion Integration Differentiation,比例-积分-微分)控制器,根据第一距离和第二距离的差值,确定机器人的旋转角度。其中,PID控制器的输入为第一距离和第二距离的差值,PID控制器的输出为机器人的旋转角度。
或者,也可以根据第一距离和第二距离的差值,确定机器人的旋转角速度,然后控制机器人以该旋转角速度旋转,再控制机器人前进,以实现机器人的巡线回桩,本申请实施例对此不作限制。
下面结合图10-16,对上述过程进行进一步说明。其中,图10是本申请实施例提供的另一种机器人的返回充电桩的方法的流程图。图11-15为机器人与充电桩之间的位置关系示意图。图16为控制机器人从中间位置返回充电桩的流程图。其中以1简单表示第一电感器11、第二电感器12和第三电感器13。
如图10-15所示,在机器人返回充电桩时,机器人行驶到充电桩附近(步骤301)后(机器人与充电桩之间的位置关系参考图11),可以继续控制机器人前进(步骤302),并在机器人前进过程中,获取第一电感器对第一通电线圈和第二通电线圈的感应数据、第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,并结合第一电感器对第一通电线圈和第二通电线圈的感应数据、第一距离和第二距离,确定第一电感器是否从非充电桩区域切换到充电桩区域。在第一电感器从非充电桩区域切换到充电桩区域(步骤303),且第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置时(步骤304),则可以控制机器人从中间位置返回充电桩(步骤305)(机器人与充电桩之间的位置关系参考框图14),直至回桩成功(机器人与充电桩之间的位置关系参考框图15)。若第一电感器从位于非充电桩区域切换到位于第一通电线圈的覆盖区域(机器人与充电桩之间的位置关系参考图12)且机器人满足预设回桩条件(步骤306),则可以控制机器人右转(步骤307)(机器人与充电桩之间的位置关系参考图13),直至第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置(步骤308),停止机器人的旋转操作,进而控制机器人从中间位置返回充电桩(步骤305)(机器人与充电桩之间的位置关系参考框图14),直至回桩成功(机器人与充电桩之间的位置关系参考框图15)。若第一电感器从位于非充电桩区域切换到位于第二通电线圈的覆盖区域且机器人满足预设回桩条件(步骤309),则可以控制机器人左转(步骤310),直至第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置(步骤311),停止机器人的旋转操作,进而控制机器人从中间位置返回充电桩(步骤305)(机器人与充电桩之间的位置关系参考框图14),直至回桩成功(机器人与充电桩之间的位置关系参考框图15)。
如图16所示,在控制机器人进入从中间位置返回充电桩的流程后(步骤401),可以控制机器人前进(步骤402),并在前进的过程中获取第一距离和第二距离的差值(步骤403),并根据差值确定机器人的旋转角度(步骤404),然后控制机器人旋转该旋转角度(405),再判断是否回桩到位(步骤406),若回桩到位则回桩结束(步骤407),若未回桩到位,则继续控制机器人前进(步骤402),进而根据第一距离和第二距离的差值,继续控制机器人旋转,直至机器人回桩到位。
本申请实施例提供的机器人的返回充电桩的方法,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离,在确定第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,且根据第一距离和第二距离确定机器人满足预设回桩条件时,控制机器人向靠近中间位置的方向旋转至中间位置,进而根据第一距离和第二距离,控制机器人从中间位置返回充电桩,使得在确定第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,且根据第一距离和第二距离确定机器人满足预设回桩条件时,仅利用电感器的感应数据,即可实现机器人的自主回桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且通过根据第一距离和第二距离调整机器人的位姿,使得机器人能够精准回桩,提高了回桩成功率,并且由于可以直接控制机器人旋转到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,从而提高了回桩效率。
下面结合图17,对本申请实施例提供的机器人的返回充电桩的方法进行进一步说明。
图17是根据本申请实施例提供的另一种机器人的返回充电桩的方法的流程图。
如图17所示,本申请实施例提供的机器人的返回充电桩的方法,可以包括以下步骤:
步骤501,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离。
其中,步骤501的具体实现过程及原理,可以参考上述实施例的描述,此处不再赘述。
步骤502,确定第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,且根据第一距离和第二距离确定机器人不满足预设回桩条件。
步骤503,控制机器人向靠近中间位置的方向旋转至中间位置或者充电桩外。
其中,确定第一电感器位于哪个区域的实现过程及原理,以及关于预设回桩条件的说明,可以参考上述实施例的描述,此处不再赘述。
可以理解的是,机器人与中间位置之间的角度大于预设角度阈值时,表示机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角度较大,此时,若控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置后,控制机器人从中间位置返回充电桩,可能无法实现机器人精准返回充电桩。第二电感器与第一通电线圈之间的第一距离或者第三电感器与第二通电线圈之间的第二距离大于等于第二预设距离阈值时,表示第一电感器至第一通电线圈和第二通电线圈之间的中线的距离较大,此时,若控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置后,控制机器人从中间位置返回充电桩,可能也无法实现机器人精准返回充电桩。机器人与中间位置之间的角度大于预设角度阈值,且第二电感器与第一通电线圈之间的第一距离或者第三电感器与第二通电线圈之间的第二距离大于等于第二预设距离阈值时,表示机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角度较大,且第一电感器至第一通电线圈和第二通电线圈之间的中线的距离较大,此时,若控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置后,控制机器人从中间位置返回充电桩,可能也无法实现机器人精准返回充电桩。
若控制机器人旋转一次运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置后,控制机器人从中间位置返回充电桩,可能无法实现机器人精准返回充电桩时,可以通过多次调整机器人位姿,将机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,再控制机器人从中间位置返回充电桩,从而实现机器人精准返回充电桩。
具体的,可以先控制机器人向靠近中间位置的方向旋转至中间位置或者充电桩外。其中,在第一电感器位于第一通电线圈的覆盖区域,且机器人不满足预设回桩条件时,可以控制机器人右转,直至第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置或者充电桩外(非充电桩区域),停止旋转;在第一电感器位于第二通电线圈的覆盖区域,且机器人不满足预设回桩条件时,可以控制机器人左转,直至第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置或者充电桩外(非充电桩区域),停止旋转。再通过以下步骤504-507的方式,多次调整机器人位姿,将机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置。
步骤504,前进预设距离并向靠近中间位置的方向旋转至中间位置。
其中,预设距离,可以根据需要任意设置,比如,在充电桩区域较大时,可以将预设距离设置为较大的值,比如1米、2米,等等,在充电桩区域较小时,可以将预设距离设置为较小的值,比如0.3米、0.6米,等等。
可以理解的是,在控制机器人旋转至第一电感器位于中间位置或者充电桩外,并控制机器人前进预设距离后,第一电感器可能不再位于中间位置。此时,可以再次控制机器人向靠近中间位置的方向旋转,使得第一电感器位于中间位置。
具体的,在控制机器人前进预设距离后,若第一电感器位于第一通电线圈的覆盖区域,则可以控制机器人右转,使得第一电感器位于中间位置;若第一电感器位于第二通电线圈的覆盖区域,则可以控制机器人左转,使得第一电感器位于中间位置。
步骤505,判断机器人是否满足预设的后退条件,若是,则执行步骤506,否则,执行步骤508。
其中,后退条件可以包括:后退次数小于等于预设次数阈值,和/或,第一距离或者第二距离小于等于第一预设距离阈值。其中,预设次数阈值和第一预设距离阈值,可以根据需要设置,本申请实施例对此不作限制。
其中,第一电感器位于中间位置,第一距离或者第二距离小于等于第一预设距离阈值时,表示机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角较大。
步骤506,后退出第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域。
步骤507,再次进入第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域。
具体的,在步骤504执行后,可以判断机器人是否满足后退条件,若满足,则控制机器人后退出第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,并对后退次数进行加1处理,再控制机器人进入第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,并返回重复执行步骤503-507,直至机器人不满足预设的后退条件。
需要说明的是,本申请实施例中,步骤507执行时,存在第一电感器未进入第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,而是直接进入第一通电线圈和第二通电线圈之间的中线所在区域的情况,此时,不必再执行步骤503。另外,步骤504执行时,存在机器人前进预设距离后,第一电感器仍然位于中间位置的情况,此时,可以直接执行后续步骤508。
步骤508,根据第一距离和第二距离,控制机器人从中间位置返回充电桩。
可以理解的是,本申请实施例中,机器人后退次数大于预设次数阈值,和/或,第一距离和第二距离大于第一预设距离阈值时,可以认为第一电感器距离中间位置的偏差较小,且机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角较小,此时可以根据第一距离和第二距离,控制机器人从中间位置返回充电桩。通过设置预设后退条件,在机器人不满足预设后退条件时,控制机器人从中间位置返回充电桩,可以避免机器人始终无法到达巡线回桩状态的情况。
通过多次调整机器人的姿态,控制机器人向靠近中间位置的方向旋转至中间位置,再控制机器人从中间位置返回充电桩,避免了机器人以初始状态为机器人相对第一通电线圈和第二通电线圈之间的中线的方向的偏航角度较大,且第一电感器至第一通电线圈和第二通电线圈之间的中线的距离较大时,进入巡线流程(从中间位置返回充电桩流程)导致不能精准回桩的情况。
具体控制机器人从中间位置返回充电桩的方法,可以参考上述实施例的描述,此处不再赘述。
下面结合图18-26,对上述过程进行进一步说明。其中,图18是本申请实施例提供的另一种机器人的返回充电桩的方法的流程图。图19-26为机器人与充电桩之间的位置关系示意图。其中以1简单表示第一电感器11、第二电感器12和第三电感器13。
如图18-26所示,在机器人回充电桩时,机器人行驶到充电桩附近(步骤601)后(机器人与充电桩之间的位置关系参考图19),可以继续控制机器人前进(步骤602),并在机器人前进过程中,获取第一电感器对第一通电线圈和第二通电线圈的感应数据、第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,并结合第一电感器对第一通电线圈和第二通电线圈的感应数据以及第一距离和第二距离,确定第一电感器是否从非充电桩区域切换到充电桩区域(步骤603)。
在第一电感器从非充电桩区域切换到充电桩区域时,若确定机器人不满足预设回桩条件(步骤604)且第一电感器位于第一通电线圈的覆盖区域(步骤605)(机器人与充电桩之间的位置关系参考图20),则可以控制机器人右转(步骤606)(机器人与充电桩之间的位置关系参考图21),直至第一电感器位于中间位置或者充电桩外(步骤607),停止机器人的旋转操作,进而控制机器人前进预设距离(步骤608)(机器人与充电桩之间的位置关系参考图22)。之后,可以继续控制机器人向靠近中间位置的方向旋转(步骤609),直至第一电感器位于中间位置(步骤610),其中,若第一电感器位于第一通电线圈的覆盖范围,则控制机器人右转(机器人与充电桩之间的位置关系参考图23),使得第一电感器位于中间位置,若第一电感器位于第二通电线圈的覆盖范围,则控制机器人左转,使得第一电感器位于中间位置。然后可以获取机器人的后退次数,并判断后退次数是否小于等于预设次数阈值(步骤611)。
在机器人的后退次数小于等于预设次数阈值时,控制机器人后退(步骤612),直至第一电感器退出第一通电线圈的覆盖范围或第二通电线圈的覆盖范围(步骤613)(机器人与充电桩之间的位置关系参考图24),再控制机器人前进(返回执行步骤605、623或614)。在机器人运行到第一电感器位于第一通电线圈的覆盖区域(步骤605)时,可以继续执行步骤605;在机器人运行到第一电感器位于第二通电线圈的覆盖区域(步骤614)时,可以继续执行步骤615;在机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置时,可以继续执行步骤624。
在机器人的后退次数大于预设次数阈值时,可以直接控制机器人从中间位置返回充电桩(步骤626)(机器人与充电桩之间的位置关系参考图25),直至回桩成功(机器人与充电桩之间的位置关系参考框图26)。
在第一电感器从非充电桩区域切换到充电桩区域时(步骤603),若确定机器人不满足预设回桩条件(步骤604)且确定第一电感器位于第二通电线圈的覆盖区域(步骤614),则可以控制机器人左转(步骤615),直至第一电感器位于中间位置或者充电桩外(步骤616),停止机器人的旋转操作,进而控制机器人前进预设距离(步骤617)。之后,可以继续控制机器人向靠近中间位置的方向旋转(步骤618),直至第一电感器位于中间位置(步骤619),其中,若第一电感器位于第一通电线圈的覆盖范围,则控制机器人右转,使得第一电感器位于中间位置,若第一电感器位于第二通电线圈的覆盖范围,则控制机器人左转,使得第一电感器位于中间位置。然后可以获取机器人的后退次数,并判断后退次数是否小于等于预设次数阈值(步骤620)。
在机器人的后退次数小于等于预设次数阈值时,控制机器人后退(步骤621),直至第一电感器退出第一通电线圈的覆盖范围或第二通电线圈的覆盖范围(步骤622),再控制机器人前进(返回执行步骤605、623或614)。在机器人运行到第一电感器位于第一通电线圈的覆盖区域(步骤605)时,可以继续执行步骤605;在机器人运行到第一电感器位于第二通电线圈的覆盖区域(步骤614)时,可以继续执行步骤615;在机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置时,可以继续执行步骤624。
在机器人的后退次数大于等于预设次数阈值时,可以直接控制机器人从中间位置返回充电桩(步骤626)。
在第一电感器从非充电桩区域切换到充电桩区域时(步骤603)(机器人与充电桩之间的位置关系参考图20),若确定机器人不满足预设回桩条件(步骤604)且确定第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置(步骤623),则可以直接控制机器人前进预设距离(步骤624),在机器人前进预设距离后,可以判断第一电感器是否仍位于中间位置(步骤625),若是,则控制机器人从中间位置返回充电桩(步骤626)。在机器人前进预设距离(步骤624)后,若第一电感器位于第一通电线圈,则执行步骤605及后续流程。在机器人前进预设距离(步骤624)后,若第一电感器位于第二通电线圈,则执行步骤614及后续流程。
通过利用上述方式控制机器人返回充电桩,使得仅利用电感器的感应数据,即可实现机器人返回充电桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且通过多次调整机器人的位姿,使第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,使得机器人能够精准返回充电桩,进一步提高了回桩成功率。
为了实现上述实施例,本发明实施例还提出一种机器人的返回充电桩的装置。
图27是本申请实施例提供的一种机器人的返回充电桩的装置的结构图。
其中,机器人的第一端中间位置设置有第一电感器、第二电感器和第三电感器;第一电感器垂直于地面设置;第二电感器和第三电感器平行于地面设置,且横向对称地设置在第一电感器的两侧,充电桩上设置有对称设置的第一通电线圈和第二通电线圈。
如图27所示,本发明实施例提出的机器人的返回充电桩的装置4具体可以包括:第一控制模块41、确定模块42和第二控制模块43。其中:
第一控制模块41,用于根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置;
确定模块42,用于根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离;以及
第二控制模块43,用于根据第一距离和第二距离,控制机器人从中间位置返回充电桩。
进一步的,在本发明实施例一种可能的实现方式中,第一控制模块41,具体用于:
在确定第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,且根据第一距离和第二距离确定机器人满足预设回桩条件时,控制机器人向靠近中间位置的方向旋转至中间位置。
进一步的,在本发明实施例一种可能的实现方式中,第一控制模块41,具体还用于:
在确定第一电感器位于第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,且根据第一距离和第二距离确定机器人不满足预设回桩条件时,控制机器人:
第一步:向靠近中间位置的方向旋转至中间位置或者充电桩外;
第二步:前进预设距离并向靠近中间位置的方向旋转至中间位置;
第三步:在确定机器人满足预设的后退条件时,后退出第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域,并再次进入第一通电线圈的覆盖区域或者第二通电线圈的覆盖区域;
第四步:重复第一步至第三步直到机器人不满足后退条件。
进一步的,在本发明实施例一种可能的实现方式中,后退条件包括:后退次数小于等于预设次数阈值,和/或,第一距离或者第二距离小于等于第一预设距离阈值。
进一步的,在本发明实施例一种可能的实现方式中,预设回桩条件包括:机器人与中间位置之间的角度小于等于预设角度阈值,和/或,第一距离和第二距离小于第二预设距离阈值;
其中,机器人与中间位置之间的角度的确定方式为,根据第一距离、第二距离、以及第二电感器和第三电感器之间的距离,确定第二电感器和第三电感器的连线与中间位置之间的角度;根据预设角度数值、以及连线与中间位置之间的角度,确定机器人与中间位置之间的角度。
进一步的,在本发明实施例一种可能的实现方式中,第二控制模块43,具体用于:
控制机器人前进,并获取第一距离和第二距离的差值;
根据差值确定机器人的旋转角度;
控制机器人旋转该旋转角度。
进一步的,在本发明实施例一种可能的实现方式中,第一通电线圈和第二通电线圈的通电电流的数值相同,且第一通电线圈和第二通电线圈的通电电流的方向相反。
进一步的,在本发明实施例一种可能的实现方式中,机器人为割草机。
需要说明的是,前述对机器人的返回充电桩的方法实施例的解释说明也适用于该实施例的机器人的返回充电桩的装置,此处不再赘述。
本发明实施例提出的机器人的返回充电桩的装置,根据第一电感器对第一通电线圈和第二通电线圈的感应数据,控制机器人运行到第一电感器位于第一通电线圈和第二通电线圈之间的中线上的中间位置,根据第二电感器对第一通电线圈的感应数据以及第三电感器对第二通电线圈的感应数据,确定第二电感器和第一通电线圈之间的第一距离以及第三电感器与第二通电线圈之间的第二距离,进而根据第一距离和第二距离,控制机器人从中间位置返回充电桩。由于仅根据电感器对通电线圈的感应数据,即可实现机器人的自主回桩,降低了机器人回桩的硬件设计复杂度和软件算法复杂度,从而降低了成本,且回桩成功率高。
为了实现上述实施例,本发明实施例还提出一种机器人2。
图28是本申请实施例提供的一种机器人的结构图。
如图28所示,该机器人2的第一端中间位置设置有第一电感器11、第二电感器12和第三电感器12;第一电感器11垂直于地面设置;第二电感器12和第三电感器13平行于地面设置,且横向对称地设置在第一电感器11的两侧,机器人2还可包括至少一个处理器21(图中以一个处理器为例进行示意)、与至少一个处理器21通信连接的存储器22,存储器存储有可被至少一个处理器21执行的指令,指令被至少一个处理器21执行,以使至少一个处理器21能够执行实现如上述实施例所示的机器人的返回充电桩的方法。
为了实现上述实施例,本发明实施例还提出一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以实现如上述实施例所示的机器人的返回充电桩的方法。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种机器人避障控制方法、装置、存储介质及机器人
- 一种机器人的附加轴添加方法、装置、存储介质及机器人
- 机器人编码方法及装置、机器人、存储介质、处理器
- 一种机器人的运行控制方法、装置、存储介质及机器人
- 充电桩的充电方法、装置、存储介质和处理器
- 机器人的返回充电桩的方法、装置、机器人及存储介质
- 机器人与充电桩的对接方法、装置、机器人与可读存储介质