一种山地果园机械自动导航收集装置
文献发布时间:2023-06-19 19:18:24
技术领域
本申请涉及果业机械的领域,尤其是涉及一种山地果园机械自动导航收集装置。
背景技术
随着科技的发展,人工智能、机器人能够实现越来越多的操作方式和功能,甚至可以代替人工而进行恶劣调节的各种作业。但是人类生活和工、农业生产的过程中有各种复杂的情形,在目前的技术条件下,单一通过人工或者一味地追求通过智能化来实现全自动化的生产与操作相对较为复杂和困难,甚至出现难以越过的技术难题,导致生产技术的停滞不前。在较为复杂的生产和操作中,通过人工和智能化互相结合、相辅相成,才能更好的实现效率、能耗以及安全等方面的整体提升。
目前山地果园运输系统一直都是我国山地果园发展的重要研究方向, 也是实现山地果园运输机械化、低碳化、节能化的主要途径。国内现阶段已经研制出很多种果园运输机械,如轮式运输机、轨道式和索道式运输机等。当由于地形复杂、山路曲折,而上述运输机械只能在主干道行驶,仍需要农户通过人力完成将物料运送到临近轨道的路边的过程,导致依旧需要消耗大量劳动力。
发明内容
为了方便对复杂地形的山地果园内的果实进行运输,减少人力消耗,本申请提供的一种山地果园机械自动导航收集装置,采用如下的技术方案:
一种山地果园机械自动导航收集装置,包括用于佩戴于采摘者身上的GPS、控制器、用于收集果实的收集斗车、绕果园周向设置的周向导轨、沿果园山体坡度方向设置的缆线组、沿缆线组运动的滑轮组,所述缆线组间隔设有若干个且相邻缆线组之间相互平行,所述缆线组两端承接周向导轨,所述收集斗车滑动连接于周向导轨且可拆卸连接于滑轮组,所述GPS、控制器、滑轮组、收集斗车相互电连接;以所述果园最高点为原点,以其中一个缆线组向下的投影方向为X轴,确定采摘者和收集斗车的坐标;所述控制器用于结合GPS控制收集斗车运动至采摘者所在坐标处。
通过采用上述技术方案,当需要采摘时,采摘人员达到需要果园中需要采摘的区域,通过gps或者采摘人员所处坐标,然后收集斗车先沿着周向导轨行进到合适的位置,再使得收集斗车与滑轮组连接,将收集斗车运输到里采摘区域最近的位置,最后由收集斗车自行寻路到采摘人员处,方便采摘人员将果实放入。在收集完果实后,收集斗车再行进到滑轮组处,搭乘滑轮组运动到周向导轨处,从而方便定点对收集斗车内的果实进行收集,减少了人力消耗。
可选的,所述收集斗车包括行走底盘、安装于行走底盘上的车体、用于与滑轮组连接安装的连接组件、安装于车体一侧的传输组件,所述传输组件用于将其上方的果实传送入车体内;所述车体转动连接于行走底盘,当所述收集斗车运动至采摘者所处果树旁边时,所述车体相对行走底盘转动至传输组件朝向树干的位置,所述传输组件展开。
通过采用上述技术方案,从而使得采摘人员只需将果实放入到传输组件上即可,传输组件可自行将果实运输到车体内,提高了效率。可使得传输组件更好靠近树干附近区域的,使得采摘人员更方便的将果实放到传输组件上,提高了效率。
可选的,所述传输组件平行设有两个且所述传输组件呈折叠设置,当所述收集斗车运动至采摘者所处果树旁边时,所述车体相对行走底盘转动至传输组件朝向树干的位置,所述传输组件展开后,两个所述传输组件分别位于树干两侧。
通过采用上述技术方案,可使得传输组件更好的覆盖树干附近区域,采摘时,农户可以方便快速地将果实放入传输组件,利用机械来协助农户减小采摘时工作量,提高了效率;此外,由于传输组件位于农户两侧,农户在工作时处于传输组件中间,两侧的传输组件对农户形成保护,可以增加农户工作时的安全性。
可选的,所述传输组件包括两根转动架、转动连接于转动架上的转动辊、用于连接两根转动架的伸缩架、套设于两根转动辊外的传输带、安装于转动架上用于带动转动辊转动的驱动电机,其中一个所述转动架安装于车体,两根转动架之间设有用于控制两根转动架之间距离的驱动缸。
通过采用上述技术方案,在不需要使用传输组件时,可通过驱动缸来调节两个转动架之间的距离,从而调节整个传输组件的长度,方便在不使用传输组件时收集斗车的行进和运输。
可选的,所述伸缩架包括若干个伸缩单元,相邻所述伸缩单元之间通过铰链转动连接,最边缘两块伸缩单元分别转动连接于两个转动架;当两个所述转动架之间距离变小时,所述伸缩架折叠,且所述伸缩架用于抵接传输带;与所述车体连接的转动架转动连接于车体,所述车体和转动架之间设有用于驱使转动架转动的转动电机。
通过采用上述技术方案,伸缩架可对传输带起到一定的支撑作用,使得两个转动架之间靠近时,传输带依旧处于被张紧的状态,不易从转动辊上脱离。根据地形需要,有必要选择是否使用传输组件,尤其是地形相对平坦、安全时,传输组件的意义降低,甚至可能降低工作的效率。在不需要使用传输组件时,可通过转动电机驱使传输组件相对车体转动至向上状态,方便在不使用传输组件时收集斗车的行进和运输,从而适配不需要使用传输组件的情形,从而达到效率、安全性和能耗的较佳的平衡。
可选的,所述缆线组包括缆线和缆线架,所述滑轮组包括滑轮架、转动连接于滑轮架的上滑轮、转动连接于滑轮架的下滑轮、安装于滑轮架上用于驱使上滑轮转动的动力电机、安装架,所述缆线穿过上滑轮和下滑轮之间且所述上滑轮抵接于缆线,所述安装架通过电葫芦安装于滑轮组下方,所述连接组件可拆卸连接于安装架。
通过采用上述技术方案,使得缆线可远离地表设置,在需要将收集斗车放到地面时,只需通过电葫芦将安装架下降至收集斗车接触底面,然后使得连接组件脱离安装架即可,操作方便。
可选的,所述连接组件包括固定安装于安装架下方的安装板、固定安装于车体上的连接板、滑动连接于连接板上的插杆、用于将插杆推向安装板的推力弹簧、用于将插杆推推离安装板的电磁铁,所述插杆由磁铁制成,所述安装板上开设有供插杆插入的插槽,所述电磁铁安装于插槽远离插杆一端。
通过采用上述技术方案,在需要装配安装架和收集斗车时,可以安装架向下,使得收集斗车上的插杆对准插槽,使得电磁铁断电,插杆在推力弹簧的作用下插入到插槽内,从而使得安装架和收集斗车稳定的连接在一起,且操作方便。
可选的,所述安装板设有两块且分别位于安装架两侧,所述连接板设有两个且分别位于车体两侧,当所述收集斗车行进如两块安装板之间时,所述连接板位于安装板外侧。
通过采用上述技术方案,从而使得收集斗车可更顺利的行驶到安装板下方且与安装板之间完成多点连接,使得滑轮组可更稳定的带着收集斗车运动。
可选的,驱动齿条包括第一驱动齿条、第二驱动齿条以及用于定位第一驱动齿条和第二驱动齿条相对位置从而调节驱动齿条整体长度的定位件,定位件包括滑动块以及锁紧螺栓,第一驱动齿条位于网面的下方且与网面背面固定,第一齿条背对网面的表面开设有沿第一驱动齿条长度方向延伸的燕尾调节槽,燕尾调节槽沿燕尾调节槽长度方向贯穿第一驱动齿条的一个端面,滑动块固定于第二驱动齿条上且滑移于燕尾调节槽中,滑动块的截面与燕尾调节槽匹配,第二驱动齿条位于第一驱动齿条背对网面的一侧,调节螺栓螺纹连接在第二驱动齿条上且穿过第二驱动齿条后与第一驱动齿条表面抵紧,通过松开调节螺栓,使得第一驱动齿条和第二驱动齿条能够相对滑动。
通过采用上述技术方案,可以使得驱动齿条提前或者延后与驱动齿轮啮合,从而根据实际需求来调整转动杆转动的时机。较早的使得驱动齿条和驱动齿轮啮合,可以在网面长度较大的情况下,实现网面的翻转,使得果实不易落出。较迟的使得驱动齿条和驱动齿轮啮合,可以延迟完成翻转收纳的时间点,收纳的效果也最佳。
可选的,所述传输带的表面设置有缓冲条,缓冲条沿传输带的长度方向延伸且沿传输带的宽度方向分布,传输带的表面上设置有沿传输带的长度方向分布的隔离条,隔离条沿传输带宽度方向延伸且沿传输带长度方向分布,隔离条包括第一隔离条和第二隔离条,第一隔离条和第二隔离条间隔交替分布,第一隔离条远离网面的一端设置有弧形的限位分拣条,限位分拣条向背对车体的方向弯曲设置,缓冲条位于第一隔离条与相邻且位于第一隔离条背对车体的一侧的第二隔离条之间,缓冲条两侧的第一隔离条和第二隔离条形成分拣限位口,沿着限位分拣条与第一隔离条连接处到远离第一隔离条方向,限位分拣条到第二隔离条背对网面的端点的距离r逐渐减小且始终小于分拣限位口的宽度R,即R大于r;第一隔离条与相邻且位于第一隔离条朝向车体的一侧的第二隔离条之间设置有对称且用于引导采摘的果实进入第一隔离条和第二隔离条之间的导向条;同一缓冲条两侧的第一隔离条、第二隔离条的相对的表面倾斜设置从而使得分拣限位口上大下小,从而使得采摘的果子在进入同一缓冲条两侧的第一隔离条和第二隔离条之间时能够良好限位,又能方便果子到达输送带的尾端时能够较好地脱离;导向条远离隔离条的点沿输送带的宽度方向到隔离条远离导向条的最大距离小于分拣限位口的宽度;输送带远离网面的侧边上凸出有用于阻挡果子沿输送带宽度方向滚出输送带的挡条。
通过采用上述技术方案,网面上滚下的果子进入输送带,然后进入分拣限位口,在限位分拣条的作用下较大的果子卡在分拣限位口处,半径小于R的果子滚出分拣限位口,位于输送带远离网面的一侧,如此当果子输送到收集斗车时,较大的果子位于收集斗车的两侧,甚至是四周,较小的果子位于收集斗车中间位置,只需在收集斗车内的果子的上面铺上较大的一些果子,那么收集斗车内的果子就呈现出较好的卖相,减少了后期对收集斗车内的果子继续人工分拣产生的劳动强度和人力成本,同时也能减少收集斗车的果子反复捣腾、人工分拣产生的果子碰伤等问题。
综上所述,本申请包括以下至少一种有益技术效果:
1.可以提高果实的运输效率,降低人工劳动强度;
2.更方便的适于山地果园各处的果实采集和运输;
3.可实现果实的定点采摘,减少劳动者浪费的时间。
附图说明
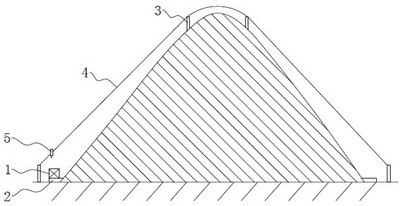
图1是实施例1中周向导轨和山体果园的布局图。
图2是实施例1中收集斗车和滑轮组的结构示意图。
图3是实施例1中收集斗车和滑轮组的剖视图。
图4是实施例1中传输组件的剖视图。
图5是实施例1中连接组件的剖视图。
图6是实施例2中收集斗车和滑轮组的结构示意图。
图7 是实施例2中收集斗车的侧视图。
图8是实施例2中收集斗车的俯视图。
图9是图6中A处的放大图。
图10是实施例2中驱动件结构爆炸示意图。
图11是实施例3中输送带的结构示意图。
图12是实施例3中输送带的结构正视图。
附图标记说明:1、收集斗车;2、周向导轨;3、缆线架;4、缆线;5、滑轮组;6、行走底盘;7、车体;8、连接组件;9、传输组件;10、转向电机;11、转动架;12、转动辊;13、伸缩架;14、传输带;15、驱动电机;16、驱动缸;17、转动电机;18、滑轮架;19、上滑轮;20、下滑轮;21、动力电机;22、安装板;23、连接板;24、插杆;25、推力弹簧;26、电磁铁;27、插槽;28、安装架;29、电葫芦;30、伸缩单元;31、收集网组;32、网杆;33、网面;34、固定杆;35、转动杆;36、第一锥齿轮;37、第二锥齿轮;38、驱动齿轮;39、驱动齿条;391、第一驱动齿条;392、第二驱动齿条;393、定位件;394、滑动块;395、锁紧螺栓;396、燕尾调节槽;40、树;141、缓冲条;142、隔离条;143、第一隔离条;144、第二隔离条;145、限位分拣条;146、分拣限位口;147、导向条;148、挡条。
具体实施方式
以下结合附图1-12对本申请作进一步详细说明。
实施例1:
本申请实施例1公开一种山地果园机械自动导航收集装置。参照图1,一种山地果园机械自动导航收集装置包括GPS、控制器、收集斗车1、周向导轨2、缆线组、滑轮组5。周向导轨2沿山体或果园周向设置。缆线组包括缆线4架3和缆线4,缆线4架3用于支撑缆线4,缆线4沿山体坡度方向设置。缆线4覆盖周向导轨2。缆线组设有若干个,且相邻缆线组中的缆线4之间间距相同且相互平行。滑轮组5滑动连接于缆线4上。GPS包括至少一个采摘者GPS模块和多个斗车GPS模块。采摘者可选择与任意一个斗车GPS模块绑定。
以果园最高点为原点,以其中一个缆线4向下的竖直投影方向为X轴,确定采摘者GPS模块和斗车GPS模块的三维坐标。采摘者可通过控制器,结合采摘者GPS和斗车GPS模块的坐标,使得与其绑定的斗车GPS模块对应的收集斗车1运动到采摘者处。在收集斗车1收集满后,再原路返回到出发点,方便对收集斗车1内的果实进行集中收集。
具体的,在确定采摘者GPS模块和斗车GPS模块的三维坐标后,收集斗车1会先沿周向导轨2运动至离采摘者最近的缆线组,然后使得收集斗车1与缆线组上的滑轮组5连接,通过滑轮组5将收集斗车1运输到离采摘者最近的位置,再放下收集斗车1,使得收集斗车1与滑轮组5脱离,最后收集斗车1自行运动到采摘所处位置最近的果树旁,方便对果实进行收集。
参照图2和图3,为了更方便的对果实进行收集,收集斗车1包括行走底盘6、安装于行走底盘6上的车体7、用于与滑轮组5连接安装的连接组件8、安装于车体7一侧的传输组件9。车体7转动连接于行走底盘6,且行走底盘6上设有用于驱使车体7转动的转向电机10。传输组件9平行设有两个且呈可折叠设置。在收集斗车1运动到果树附近后,车体7相对行走底盘6转动至传输组件9朝向树干的位置,然后传输组件9展开,两个传输组件9分别位于树干两侧。在采摘时,工人只需将果果实放到传输组件9上,通过传输组件9果实可顺畅的自行进入到车体7内,方便对果实进行收集。
参照图2和图4,传输组件9包括两根转动架11、转动连接于转动架11上的转动辊12、用于连接两根转动架11的伸缩架13、套设于两根转动辊12外的传输带14、安装于转动架11上用于带动转动辊12转动的驱动电机15。其中一个转动架11安装于车体7,车体7和转动架11之间设有用于驱使转动架11转动的转动电机17。两根转动架11之间设有用于控制两根转动架11之间距离的驱动缸16。伸缩架13包括若干个伸缩单元30,相邻伸缩单元30之间通过铰链转动连接,最边缘两块伸缩单元30分别转动连接于两个转动架11;当两个转动架11之间距离变小时,伸缩架13折叠,且伸缩架13用于抵接传输带14。
在使用前,伸缩架13呈波浪形,处于整体长度较短的折叠状态。在收集斗车1运到到合适位置后,驱动缸16推动两个转动架11相对运动,使得伸缩架13逐渐展开,也使得传输带14逐渐被转动辊12张紧,直至伸缩架13离开传输带14,且传输带14依旧保持张紧的状态。将果实放到传输带14上后,驱动电机15带动传输带14传输,从而使得果实掉落到车体7内。若果实不易运输,可以通过转动电机17带动转动架11转动,使得整个传输组件9呈倾斜设置,从而更方便使得果实进入到车体7内。同时,若传输完毕,可以使得两个转动架11相互靠近,完成传输组件9的折叠,然后通过转动电机17带动转动架11转动至传输组件9竖直向上设置,从而减少收集斗车1整体所占空间,方便后续收集斗车1的运输和行进。
参照图2,滑轮组5包括滑轮架18、转动连接于滑轮架18的上滑轮19、转动连接于滑轮架18的下滑轮20、安装于滑轮架18上用于驱使上滑轮19转动的动力电机21、安装架28。缆线4穿过上滑轮19和下滑轮20之间且所述上滑轮19抵接于缆线4,安装架28通过电葫芦29安装于滑轮组5下方,连接组件8可拆卸连接于安装架28。
参照图2和图5,具体的,连接组件8包括固定安装于安装架28下方的安装板22、固定安装于车体7上的连接板23、滑动连接于连接板23上的插杆24、用于将插杆24推向安装板22的推力弹簧25、用于将插杆24推推离安装板22的电磁铁26。安装板22设有两块且分别位于安装架28两侧,连接板23设有两个且分别位于车体7两侧,当收集斗车1行进如两块安装板22之间时,连接板23位于安装板22外侧。插杆24由磁铁制成。安装板22上开设有供插杆24插入的插槽27,电磁铁26安装于插槽27远离插杆24一端。
在需要装配安装架28和收集斗车1时,可以通过电葫芦29使得安装架28向下运动,然后使得收集斗车1行进入两块安装板22之间,使得收集斗车1上的插杆24对准插槽27。然后使得电磁铁26断电,插杆24在推力弹簧25的作用下插入到插槽27内,从而使得安装架28和收集斗车1稳定的连接在一起,且操作方便。在需要分离安装架28和收集斗车1时,可以使得电磁铁26通电,将插杆24推离插槽27,然后使得收集斗车1驶离安装板22即可,操作方便。
实施例2:
实施例2和实施例1的区别在于,参照图6和图7,为了更好的收集小型果实,传输组件9一侧或两侧设有收集网组31,本实施例的图中以传输组件9朝外一侧设有收集网组31为例。收集网组31包括网杆32和网面33。网杆32设有两根且分别固定连接于两个转动架11。网面33固定连接于两根网杆32之间。且网杆32远离转动架11一端成向上倾斜设置。
参照图8,在工作时,使得收集斗车1运动至树杆插入到两个传输组件9之间。此时摇动树木,树木上的小果(如枣子、板栗等)会掉落到网面33和传输组件9上,然后被传输组件9带动到收集斗车1内,从而方便了小果的收集和采摘。
当传输组件9两侧都有收集网组31时,两个传输组件9的间隔可以设置的较大,适配于树干较粗的果树。此时收集斗车1运动至树杆插入到两个传输组件9之间时,网面33会抵接于树干,从而更好的收集果实。
参照图6和图9,为了在运输时减小收集网组31的体积,网杆32包括固定连接于转动架11的固定杆34和转动连接于固定杆34的转动杆35。转动杆35上固定连接有转动轴,转动杆35通过转动轴转动连接于固定杆34。转动杆35上设有第一锥齿轮36。第一锥齿轮36啮合有转动连接于固定杆34的第二锥齿轮37。第二锥齿轮37同轴连接有驱动齿轮38,网面33朝外一侧沿传输组件9长度方向设有驱动齿条39。当传输组件9收缩时,驱动齿条39靠近驱动齿轮38,直至其与驱动齿轮38啮合,从而驱使驱动齿轮38转动,来带动转动杆35相对固定杆34转动,完成折叠,从而减少了收集网组31的整体体积,方便后续运输。同时也可通过驱使转动杆35相对固定杆34转动,来使网面33上的果实更容易更好的掉落到传输组件9上,从而进入到收集斗车1内。
如图9和10所示,驱动齿条39包括第一驱动齿条391、第二驱动齿条392以及用于定位第一驱动齿条391和第二驱动齿条392相对位置从而调节驱动齿条39整体长度的定位件393,定位件393包括滑动块394以及锁紧螺栓395,第一驱动齿条391位于网面33的下方且与网面33背面固定,第一齿条391背对网面33的表面开设有沿第一驱动齿条391长度方向延伸的燕尾调节槽396,燕尾调节槽396沿燕尾调节槽396长度方向贯穿第一驱动齿条391的一个端面,滑动块394固定于第二驱动齿条392上且滑移于燕尾调节槽396中,滑动块394的截面与燕尾调节槽396匹配,第二驱动齿条位392于第一驱动齿条391背对网面33的一侧,调节螺栓395螺纹连接在第二驱动齿条392上且穿过第二驱动齿条392后与第一驱动齿条391表面抵紧。通过松开调节螺栓395,使得第一驱动齿条391和第二驱动齿条392能够相对滑动。在驱动齿条39与驱动齿轮38啮合时,第二驱动齿条392先与驱动齿轮38的下半部分啮合,当驱动齿轮38运动到第一驱动齿条391位置时,第一驱动齿条391与驱动齿轮38的上半部分啮合,从而通过调整驱动齿条39的长度,可以使得驱动齿条39提前或者延后与驱动齿轮38啮合,从而根据实际需求来调整转动杆35转动的时机。较早的使得驱动齿条39和驱动齿轮38啮合,可以在网面33长度较大的情况下,实现网面33的翻转,使得果实不易落出。较迟的使得驱动齿条39和驱动齿轮38啮合,可以延迟完成翻转收纳的时间点,收纳的效果也最佳。
实施例3:
实施例3与实施例2的区别仅在于:
如图11和图12所示,在实施例3中,传输带14的表面设置有缓冲条141,缓冲条141沿传输带14的长度方向延伸且沿传输带14的宽度方向分布,传输带14的表面上设置有沿传输带14的长度方向分布的隔离条142,隔离条142沿传输带14宽度方向延伸且沿传输带14长度方向分布,隔离条142包括第一隔离条143和第二隔离条144,第一隔离条143和第二隔离条144间隔交替分布,第一隔离条143远离网面33的一端设置有弧形的限位分拣条145,限位分拣条145向背对车体7的方向弯曲设置,缓冲条141位于第一隔离条143与相邻且位于第一隔离条143背对车体7的一侧的第二隔离条144之间,缓冲条141两侧的第一隔离条143和第二隔离条144形成分拣限位口146,沿着限位分拣条145与第一隔离条143连接处到远离第一隔离条143方向,限位分拣条145到第二隔离条144背对网面33的端点的距离r逐渐减小且始终小于分拣限位口146的宽度R,即R大于r。第一隔离条143与相邻且位于第一隔离条143朝向车体7的一侧的第二隔离条144之间设置有对称且用于引导采摘的果实进入第一隔离条143和第二隔离条144之间的导向条147。
同一缓冲条141两侧的第一隔离条143、第二隔离条144的相对的表面倾斜设置从而使得分拣限位口146上大下小,从而使得采摘的果子在进入同一缓冲条141两侧的第一隔离条143和第二隔离条144之间时能够良好限位,又能方便果子到达输送带14的尾端时能够较好地脱离。
导向条145远离隔离条142的点沿输送带14的宽度方向到隔离条142远离导向条145的最大距离小于分拣限位口146的宽度。避免同时多个采摘的果实卡在分拣限位口146。使得位于刚进入分拣限位口146位置的果子能往远离收集斗车1的方向滚入下一个分拣限位口146。
输送带14远离网面33的侧边上凸出有用于阻挡果子沿输送带14宽度方向滚出输送带14的挡条148。
网面33上滚下的果子进入输送带,然后进入分拣限位口146,在限位分拣条145的作用下较大的果子卡在分拣限位口146处,半径小于R的果子滚出分拣限位口146,位于输送带远离网面33的一侧,如此当果子输送到收集斗车1时,较大的果子位于收集斗车1的两侧,甚至是四周,较小的果子位于收集斗车1中间位置,只需在收集斗车1内的果子的上面铺上较大的一些果子,那么收集斗车1内的果子就呈现出较好的卖相,减少了后期对收集斗车1内的果子继续人工分拣产生的劳动强度和人力成本,同时也能减少收集斗车1的果子反复捣腾、人工分拣产生的果子碰伤等问题。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种锻压机械循环工作的收集装置
- 一种机械加工粉尘收集装置
- 一种山地果园机械自动导航控制装置
- 面向无人驾驶施药机械的山地果园地块导航方法