适用于窄巷道AGV的全向行驶装置
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及自动化物流领域,具体涉及AGV的机械设计和系统设计。
背景技术
AGV(Automated Guided Vehicle,自动导引运输车)是指装备设有电磁或光学等自动导引装置的运输车,它能够沿规定的导引路径行驶。随着信息技术的进步和自动化水平的成熟,AGV的应用也愈来愈普遍,广泛应用在搬运、堆垛、物流各个领域。
如公告号为CN210835727U的中国专利文件公开了一种AGV小车,AGV小车包含车体,车体上安装有电池和控制箱,还安装有避障传感器。在车底的底盘上设有行走装置,AGV小车在相应的控制命令下在指定区域移动和搬运物件。
AGV的主要功能之一就是对物件的搬运,尤其是将货物放入或取出货架,且在货架与货架之间的巷道中行走。然而,现有的AGV在行走过程中存在安全性的缺陷,即在AGV工作过程中,会由于行驶的不顺畅使得装载的货物产生抖动或者掉落。另一方面,随着物流技术的发展,对物流环境的空间利用率的要求也越来越高。空间利用率的提升体现在两个方面。其一,货架的层数和高度会增加,AGV需要获取更高高度的货物。在存取高位置货物的过程中,整个机器的重心升高,若出现抖动,则AGV倾翻的风险会更高;其二,货架和货架之间的间距减小,即巷道的宽度值越来越小,这就使得AGV小车在行走、转向过程中,AGV的底盘或AGV的轮胎容易与货架发生碰撞。
发明内容
本发明的目的是提供适用于窄巷道AGV的全向行驶装置,在工作过程中增加行走顺畅度,不卡轮,从而减小车辆抖动增加安全性,同时与货架不容易碰撞,增加AGV在窄巷道中的适用性和通过性。
本发明的上述技术目的是通过以下技术方案得以实现的:适用于窄巷道AGV的全向行驶装置,包含底盘架和与所述底盘架连接的行走装置,所述行走装置包含万向轮组件和驱动轮组件,所述万向轮组件包含与所述底盘架连接的连接板,还包含中介板和轮体组件,所述中介板通过上轴与所述连接板转动连接,所述轮体组件通过下轴与所述中介板转动连接,所述上轴和所述下轴均在竖直方向延伸,两者偏心设置,即所述上轴的竖直中轴线和所述下轴的竖直中轴线不共线,所述下轴与所述轮体组件偏心设置,即所述下轴的竖直中轴线和所述轮体组件的竖直中轴线不共线。
作为本发明的优选,所述中介板包含在竖直方向依次包含上板、下板和用于连接二者的连接钉,所述上轴与所述上板,所述下轴与所述下板连接。
作为本发明的优选,所述轮体组件包含定架和与所述定架铰接的摆动架,所述摆动架的两侧各连接一个轮体。
作为本发明的优选,所述摆动架包含用于连接所述轮体的连轮轴、与所述连轮轴连接的套接轴和设在所述连轮轴上且用于阻挡所述轮体外脱的挡轮片,所述定架开设有留口,所述套接轴套入所述留口。
作为本发明的优选,所述套接轴和所述连轮轴均在水平方向延伸,且两者相互垂直。
作为本发明的优选,所述定架包含倾斜延伸的横斜架。
作为本发明的优选,所述连接板包含平板体和位于所述平板体上表面且用于容纳所述上轴 的容轴部。
作为本发明的优选,所述万向轮组件和所述驱动轮组件均为两个,两个所述万向轮组件呈对角线位置排布。
作为本发明的优选,其中一个所述驱动轮组件与一个所述万向轮组件连接,另一个所述驱动轮组件与另一个所述万向轮组件均独自与所述底盘架连接。
综上所述,本发明具有如下有益效果:
1、上轴、下轴、轮体组件做的分轴偏心设置,使得整个万向轮组件在转向过程获得两段式转向,从而,上部转动和下部转动时,极大的增加转动的顺畅度。这样的转向顺畅使得转向过程,万向轮不容易“卡轮”,从而不产生突然的失速、停滞,这就表现在AGV转向时不抖动,可以极大增加货物运输的安全性。
2、两段式转向,使得万向轮组件旋转时呈一个“缩径”的状态,无论是上部旋转还是下部旋转,都是以较小的半径进行旋转,从而使得万向轮转向过程中对于窄巷道旁边的货架不容易触碰。
3、中介板做了分板独立设置,便于装配工艺。
4、连接板包含有容轴部,其内腔用于容纳上轴,上轴的轴向长度可以增长,受力更为稳定,万向轮在转向时更安全。
5、每个万向轮组件均包含两个轮体,提供更好的承重效果。
6、两个轮体依靠套接轴获得上下摆动效果,使得两个轮体即使在颠簸路面能一直与地面接触,提供更好的抓地力。
7、行走装置包含两个万向轮组件和两个驱动轮组件,且是对角线排布设置。这样的四轮对角设置不仅可以使得AGV转向更为便捷,且动力均匀,前进后退更为平稳。
8、其中一个万向轮组件与一个驱动轮组件之间共联,使得四个触地点变成了三个触地点,AGV在遇到坑洼的作业环境下,各个轮子都能自始至终与地面接触,稳定性和抓地力更好。
附图说明
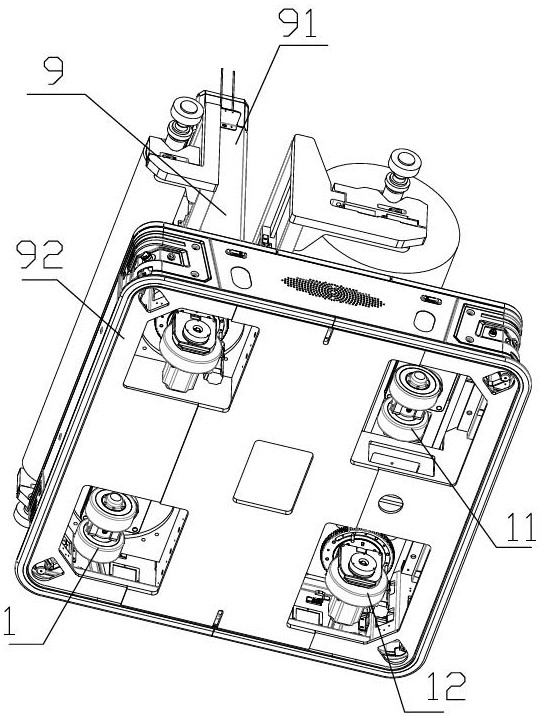
图1是实施例一的示意图;
图2是其中一个万向轮组件的示意图;
图3是图2的侧视图。
图4是图2的上半部分的侧面剖视图。
图5是图2隐藏一个轮体后的示意图。
图中:
1、行走装置,11、万向轮组件,111、连接板,1111、平板体,1112、容轴部,112、中介板,1121、上板,1122、下板,1123、连接钉,113、轮体组件,1131、定架,11311、横斜架,11312、留口,1132、摆动架,11321、套接轴,11322、连轮轴,11323、挡轮片,1133、轮体,12、驱动轮组件,21、上轴,22、下轴,9、车体,91、主架,92、底盘架。
具体实施方式
以下结合附图对本发明作进一步详细说明。
本具体实施例仅仅是对本发明的解释,其并不是对本发明的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本发明的权利要求范围内都受到专利法的保护。
实施例1,适用于窄巷道AGV的全向行驶装置,如图1所示,该种全向行驶装置包含底盘架92,且往往与主架91连接,两者共同构成了车体9的主体部分。而行走装置1就安装在底盘架92的下表面。
行走装置1包含两个万向轮组件11和两个驱动轮组件12,四个轮组件均匀分布在底盘架92的四角,且两个万向轮组件11是对角线排布设置。这样的四轮对角设置不仅可以使得AGV转向更为便捷,且动力均匀,前进后退更为平稳。而在本实施例中,其中一个万向轮组件11与一个驱动轮组件12之间通过一个连接件,例如共联轴,进行连接。这样共联,使得四个触地点变成了三个触地点,AGV在遇到坑洼的作业环境下,各个轮子都能自始至终与地面接触,稳定性和抓地力更好。
在本案中,对驱动轮组件12的具体结构不做更改,可以选用现有技术中的成熟产品。本案的核心是对万向轮组件11的结构更改,具体而言,采用了双轴分离、偏心设计的发明构思。
如图2和图4所示,万向轮组件11总体上可以看成三大部件,自上而下分别是连接板111、中介板112和轮体组件113。其中,连接板111用于和底盘架92连接,在万向轮要转向时,连接板111可以视为一个不动件。中介板112是一个承上启下的中间部件,依靠上轴21与上方的连接板111转动连接,又依靠下轴22与下方的轮体组件113转动连接。并且,上轴21和下轴22必须要偏心设置。如图2所示,上轴21在竖直方向的中轴线为L1,而下轴22在竖直方向的中轴线为L2,两者不能共线,两者在水平方向存在一定的间距,这即为偏心设置。为了便于表述,上轴21处发生的转动下文简称为上部转动,下轴22处发生的转动下文简称为下部转动。
在万向轮需要转向的时候,轮体组件113由于触地,其受到的摩擦效果除了内部部件自身的摩擦效果(例如轴承),还需要附加其轮体1133与地面之间的摩擦效果。而上轴21这个部分则不同,由于不触地,只受到内部部件的摩擦效果(例如轴承)。故,在实际转向的过程中,万向轮是两段式转向,在第一段转向路程中,只存在上部转动,此时下部是不转动的。随着万向轮转到一定角度,转向力的方向和万向轮的夹角变化,自然进入到第二段转向路程,此时上部不转动(由于转向力方向的关系),而下部开始转动,直至最后转向完成。
这样的双轴偏心设置带来的两段式转向的技术效果有两个方面,一方面是,上部转动和下部转动时,极大的增加转动的顺畅度。其原理时上部转动时,只考虑内部部件的摩擦系数摩擦效果,而这在实际产品中依靠轴承等部件可轻易解决,转动顺畅。而在下部转动时,虽然依然要考虑地面摩擦系数,但是由于此时的下部转向的旋转半径是小的,此时上部不动,下部的转向半径小,力臂小,转向也较为顺畅。这样的转向顺畅使得转向过程,万向轮不容易“卡轮”,从而不产生突然的失速、停滞,这就表现在AGV转向时不抖动,可以极大增加货物运输的安全性。
另一方面是,体现在转向半径的优化。两段式的转向,在上部转动的过程中,由于下部不跟着转动,此时整个万向轮组件11呈一个“缩径”的状态,而非一个“伸径”的状态。如图3所示,上轴21的中轴线为L1,下轴22的中轴线为L2,而轮体组件113的中轴线是L3,“缩径”是指,L1和L2和L3三者在水平面上投影的点,不在同一条直线上,L1投影点和L2投影点的连线一,与,L2投影点和L3投影点的连线二,两者之间存在夹角。这样的夹角,即使得整个万向轮在上部转动的过程中是不舒展的,是缩着的。整个万向轮在上部旋转时,回转半径是L1投影点和L3投影点之间的距离,下部旋转时,回转半径是连线二,故无论是上部旋转还是下部旋转,都是以较小的半径进行旋转,从而使得万向轮转向过程中对于窄巷道旁边的货架不容易触碰。
进一步的,如图4和图2所示,中介板112做了分板独立设置,即包含上板1121和下板1122,两者之间依靠连接钉1123连接。两者也分别与上轴21和下轴22连接。这样的分板设置便于AGV的加工和装配,即先将上板1121、上轴21、连接板111连接,将下板1122、下轴22和轮体组件113连接,再将上板1121和下板1122连接,便于装配工艺。连接板111包含平板体1111,其与底盘架92固定连接,其上方外突设有容轴部1112,其内腔用于容纳上轴21,这就使得上轴21的轴向长度可以增长,受力更为稳定,万向轮在转向时更安全。
如图2和图5所示,轮体组件113包含相互配合的定架1131和摆动架1132。前者与下轴22连接,且其中包含有横斜架11311和留口11312。而摆动架1132包含套接轴11321和连轮轴11322,套接轴11321套接在留口11312中,连轮轴11322与套接轴11321连接,两个轮体1133安装在连轮轴11322的两侧,且被挡轮片11323限位阻挡。两个轮体1133提供更好的承重效果,且依靠套接轴11321获得上下摆动效果,使得两个轮体1133即使在颠簸路面能一直与地面接触,提供更好的抓地力。
- 一种适用于车轮行驶性能测试的土槽试验装置
- 一种适用于多根窄细管道内表面镀膜的装置
- 一种全向行驶AGV底盘组件及AGV小车
- 一种可全向行驶的AGV底盘及一种AGV设备