风电变桨驱动器的陀螺仪测速传感器标定系统及标定方法
文献发布时间:2023-06-19 19:35:22
技术领域
本发明涉及传感器标定技术领域,尤指一种风电变桨驱动器的陀螺仪测速传感器标定系统及标定方法。
背景技术
风力发电是将风能转换成电能,整个过程不需要燃料也没有辐射和污染产生,是一种清洁能源。风力发电的原理是利用风力带动风车叶片旋转,再通过增速机将旋转的速度提升,来带动发电机发电。
变桨系统是大型风电机组控制系统的核心部件之一,变桨系统能够通过调节桨叶的节距角,改变气流对浆叶的攻角,进而控制风轮捕获的气动转矩和气动功率。变桨驱动器为变桨系统提供信号,从而使变桨系统通过控制叶片的角度来控制风轮的转速,进而控制风机的输出功率。变桨驱动器内部陀螺仪测速传感器是变桨系统控制角度和速度的核心信号采集部件,陀螺仪测速传感器的精度将会直接影响到变桨系统的控制精度,所以陀螺仪测速传感器的精度标定变得尤为重要。
变桨驱动器与变桨系统安装在风电设备上。而风电场一般建在自然环境恶劣的地区,在其工作过程中将会承受高低温、湿热、振动、腐蚀、高海拔等环境应力的考验,一旦产品的性能承受不住环境应力的考核将会出现故障。轻则造成风机停机、重则危及整个塔筒的安全,故陀螺仪测速传感器多应力精度标定变得尤为重要。
现有的陀螺仪一般按照JJF1535-2015《微电机(MEMS)陀螺仪校准规范》校准,该校准规范中涉及的校准方法包含了常温、高温、低温和角度等标定工况。
但现有的标定手段存在有以下技术缺陷:
1、单个环境应力标定,不能完全覆盖使用环境的全部应力影响;
2、角度标定只能实现单方向倾角设定;
3、工作带宽标定采用的是定频试验方法即定频率、定振幅的方式进行测量,而风电变桨驱动器所处的工作环境是低频随机振动应力,采用定频试验的方法不能模拟真实的振动环境应力;
4、现有的标定方法陀螺仪的输入值均以采用的标定设备输出为准,一旦标定设备受外界环境的影响或自身的故障将会影响整个标定结果。
如何设计一种可解决上述技术问题的风电变桨驱动器的陀螺仪测速传感器标定系统及标定方法,是本发明人潜心研究的课题。
发明内容
本发明的目的在于提供一种风电变桨驱动器的陀螺仪测速传感器标定系统及标定方法,其可以在温度、湿度、低气压、振动等环境工况下实现带多角度的标定测试,实现多个综合环境工况下的标定测试,能全面精准的标定出陀螺仪测速传感器相关参数。
为了实现上述目的,本发明的技术解决方案为:一种风电变桨驱动器的陀螺仪测速传感器标定系统,其中包括电动振动台,所述电动振动台上安装有传动固定治具,所述传动固定治具上安装有传动轴,所述传动轴通过传动机构与伺服电机连接,所述传动轴通过联轴器与编码器连接,所述传动轴的一端与用于安装所述陀螺仪测速传感器的角度参数治具的一端连接,所述角度参数治具的另一端与滑环可相对转动的连接,所述滑环上连接有用于与所述陀螺仪测速传感器连接的数据传输线及用于与加速度传感器连接的信号线。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述传动固定治具包括固定于所述电动振动台上的底座,所述底座上安装有多个轴承座,各所述轴承座上分别安装有轴承,所述传动轴安装于多个所述轴承上。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述传动机构包括安装于所述伺服电机输出轴上的第一同步轮、安装于所述传动轴上的第二同步轮及安装于所述第一同步轮和第二同步轮上的同步带,所述伺服电机通过所述传动机构带动所述传动轴转动。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述伺服电机安装于伺服电机安装架上。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述角度参数治具采用板状,所述传动轴的一端通过螺栓与所述角度参数治具连接,所述传动轴上与所述角度参数治具连接的部位为平切面。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述角度参数治具的另一端通过钢索与所述滑环连接。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述滑环安装于滑环固定架上。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中所述编码器安装于编码器安装架上,所述编码器安装架固定于所述电动振动台。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统,其中还包括环境试验箱,所述环境试验箱罩在所述电动振动台上方,使所述传动固定治具、部分所述传动机构及所述角度参数治具罩在所述环境试验箱的内腔。
一种风电变桨驱动器的陀螺仪测速传感器标定系统的标定方法,其包括如下步骤:
S1、根据风电变桨驱动器的使用环境获取标定的环境应力为温度/湿度/振动综合环境应力;
S2、将变桨驱动器内部陀螺仪测速传感器安装在角度参数治具上,并将数据传输线与所述陀螺仪测速传感器和滑环连接,再将振动控制加速度传感器安装在角度参数治具上,并将加速度传感器信号线连接到滑环上;
S3、将所述加速度传感器信号线与振动控制系统连接,将编码器通过信号线与信号采集器连接,将所述陀螺仪测速传感器的信号线与信号采集器连接;
S4、在环境试验箱上设置温度/湿度程序,待温度和湿度稳定后运行陀螺仪测速传感器,待所述陀螺仪测速传感器运行稳定后开启伺服电机,设定标定的转速并运转伺服电机,采集陀螺仪测速传感器输出数据和编码器输出数据;
S5、将编码器的输出转速和伺服电机的控制转速进行比对,数据无异常后采集所述陀螺仪测速传感器的输出数据;
S6、运行电动振动台,按低频随机振动开启振动环境应力;
S7、将所述编码器的输出转速和伺服电机的控制转速进行比对,数据无异常后采集所述陀螺仪测速传感器的输出数据;
S8、根据标定要求,重复S5~S8步骤多遍并采集相关数据进行标定分析。
采用上述方案后,本发明风电变桨驱动器的陀螺仪测速传感器标定系统及标定方法具有以下有益效果:
1、本发明可以在常温、高温、低温、湿热、低气压、振动等单个环境工况下实现带多角度的标定测试,并可实现多个综合环境工况下的标定测试,如温度/湿度、温度/湿度/振动、温度/湿度/低气压等多应力耦合施加工况下的标定数据获取;
2、可以实现输入参数的多途径监控,不仅能够规避标定参数异常情况,而且能够实现不同环境应力下的标定数据比对,能够更好的获取更准确的陀螺仪传感器修正参数,为风电变桨驱动器内部陀螺仪测速传感器标定计算提供更有效的数据,更能全面精准的标定出风电变桨驱动器内部陀螺仪测速传感器相关参数;
3、采用本发明可完全模拟实际安装状态和角度要求进行标定;
4、采用本发明能够同时获取标准源转速和传动轴转速,不仅能够达到相互监督的效果而且能够用于数据分析,更好的获取陀螺仪传感器的标定参数和精度。
附图说明
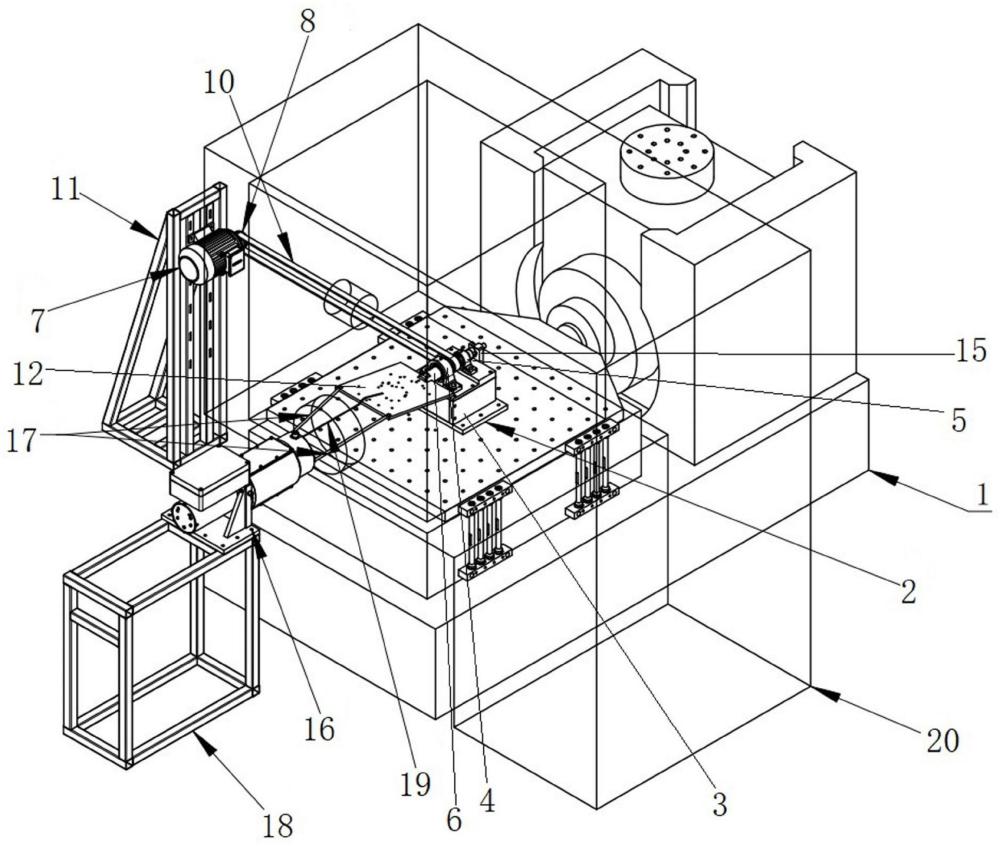
图1是本发明风电变桨驱动器的陀螺仪测速传感器标定系统结构图;
图2是本发明风电变桨驱动器的陀螺仪测速传感器标定系统的局部放大图。
下面结合附图,通过实施例对本发明做进一步的说明。
具体实施方式
如图1所示本发明风电变桨驱动器的陀螺仪测速传感器标定系统的结构示意图,其包括电动振动台1,电动振动台1的前部上表面安装有传动固定治具2,用于实现低频随机振动应力传递。结合图2所示,传动固定治具2包括底座3,底座3通过螺栓固定于电动振动台1的上表面。底座3的上表面安装有第一轴承座4和第二轴承座5,第一轴承座4上安装有UCP209轴承21,第二轴承座5上安装有UCP205轴承22,轴承21、轴承22上安装有传动轴6。传动轴6通过传动机构与伺服电机7连接。
传动机构包括安装于伺服电机7的输出轴上的第一同步轮8、安装于传动轴6上的第二同步轮9及安装于第一同步轮8和第二同步轮9上的同步带10。伺服电机7通过传动机构带动传动轴6转动,传动轴6传递伺服电机7的转速。伺服电机7安装于伺服电机安装架11上,伺服电机安装架11放置于地面上。该伺服电机安装架11为三棱柱形的架体,伺服电机7安装于伺服电机安装架11的竖直向的侧面上。
传动轴6的前端被切削成具有上、下平面的连接端,传动轴6的该连接端通过多个螺栓与角度参数治具12的后端连接,角度参数治具12采用矩形板体,该角度参数治具12用于安装陀螺仪测速传感器,其根据需要标定的陀螺仪测速传感器实际安装角度要求设计加工,实现角度参数状态。传动轴6的后端通过联轴器13与编码器14连接,编码器14用于采集传动轴6的输出转速。编码器14安装于编码器安装架15上,编码器安装架15固定于电动振动台1上。
角度参数治具12的前端与滑环16可相对转动的连接,本实施例角度参数治具12的前端通过两条钢索17与滑环16的后端连接。滑环16安装于滑环固定架18上。滑环16上连接有用于与陀螺仪测速传感器连接的数据传输线19及用于与加速度传感器连接的信号线(图中未示出)。
还包括环境试验箱20,用于实现温度/湿度环境应力参数,其与电动振动台1的组合系统用于实现温度/湿度/振动综合环境应力同步参数。环境试验箱20罩在电动振动台1的上方,使传动固定治具2、部分传动机构及角度参数治具12罩在环境试验箱20的内腔。传动机构的第一同步轮8及部分同步带10位于位于环境试验箱20的外面。
本发明风电变桨驱动器的陀螺仪测速传感器标定系统的标定方法为:
S1、根据风电变桨驱动器的使用环境获取标定的环境应力为温度/湿度/振动综合环境应力,具体环境应力参数为温度55℃、湿度98%RH、振动为随机;
本实施例中,变桨驱动器的内部陀螺仪测速传感器在实际工作时的安装状态为垂直于旋转方向,倾角±10°,水平方向倾角25°。变桨驱动器内部的陀螺仪测速传感器转速标定范围为3~20rpm;
S2、将变桨驱动器内部的陀螺仪测速传感器安装在角度参数治具12上,并将数据传输线19与变桨驱动器内部陀螺仪测速传感器和滑环16连接,再将振动控制加速度传感器安装在角度参数治具12上,并将加速度传感器信号线连接到滑环16上;
S3、将加速度传感器信号线与振动控制系统连接,将编码器14通过信号线与信号采集器连接,将变桨驱动器内部陀螺仪测速传感器信号线与信号采集器连接;
S4、在环境试验箱20上设置温度/湿度程序即温度55℃、湿度98%RH,待温度和湿度稳定后运行变桨驱动器内部陀螺仪测速传感器,待变桨驱动器内部陀螺仪测速传感器运行稳定后开启伺服电机7,设定标定的转速并运转伺服电机7,采集变桨驱动器内部陀螺仪测速传感器的输出数据和编码器14的输出数据;
S5、将编码器14的输出转速和伺服电机7的控制转速进行比对,数据无异常后采集变桨驱动器内部陀螺仪测速传感器的输出数据;
S6、运行电动振动台1,按低频随机振动开启振动环境应力;
S7、将编码器14的输出转速和伺服电机7的控制转速进行比对,数据无异常后采集变桨驱动器内部陀螺仪测速传感器的输出数据;
S8、根据标定要求,重复S5~S8步骤三遍,并采集相关数据进行标定分析。
本发明的标定系统采用的上述标定方法可以在常温、高温、低温、湿热、低气压、振动等单个环境工况下实现带多角度的标定测试,并可实现多个综合环境工况下的标定测试,如温度/湿度、温度/湿度/振动等多应力耦合施加工况下的标定数据获取。本发明可以实现输入参数的多途径监控,不仅能够规避标定参数异常情况,而且能够实现不同环境应力下的标定数据比对,能够更好的获取更准确的陀螺仪传感器修正参数,为风电变桨驱动器内部陀螺仪测速传感器标定计算提供更有效的数据,更能全面精准的标定出风电变桨驱动器内部陀螺仪测速传感器相关参数。采用本发明可完全模拟实际安装状态和角度要求进行标定。采用本发明能够同时获取标准源转速和传动轴转速,不仅能够达到相互监督的效果而且能够用于数据分析,更好的获取陀螺仪传感器的标定参数和精度。
以上所述实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通工程技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明的权利要求书确定的保护范围内。
- 一种永磁同步电机旋变零位标定系统及标定方法
- 风电变桨系统的安全链及风电变桨系统
- 一种风电变桨控制系统与风电变桨系统