回转支撑工作站
文献发布时间:2023-06-19 19:35:22
技术领域
本发明属于回转支撑装配技术领域,尤其涉及一种回转支撑工作站。
背景技术
回转支撑又叫转盘轴承,是两物体之间需作相对回转运动,又需同时承受轴向力、径向力、倾翻力矩的机械所必需的重要传动部件,因此通常回转支撑的体积和重量较大,在现有技术中一般通过人工用行车吊装回转支撑,然后人工观察对正回转支撑与拧紧机进行上料,并且需要人工用行车吊装回转支撑,人工观察对正回转支撑与物料框进行下料,由于上下料均需要人工观察和人工行车吊装,导致回转支撑上料与下料时吊装速度慢、吊装效率低,并且人工观察对正回转支撑与拧紧机具有较大的安全风险,另外,需要一直占用一个操作人员在工作岗位执行动作,导致回转支撑上下料占用成本大。
发明内容
本发明的主要目的是提出一种回转支撑工作站,旨在解决现有技术中回转支撑上下料效率低、安全风险大和成本大的技术问题。
为了实现上述目的,本发明提供一种回转支撑工作站,用于对拧紧机进行回转支撑上下料,所述回转支撑设置有内环槽,所述回转支撑工作站包括:夹具系统,用于伸入所内环槽内,所述夹具系统包括夹具主体和安装于所述夹具主体的多个可相对所述夹具主体伸缩的夹爪,所述夹爪用于撑紧、夹持所述回转支撑;龙门系统,用于驱动所述夹具系统沿X向、Y向或Z向运动;控制器,被配置为:获取待输送所述回转支撑的待输送位置信息、型号信息和指定输送位置信息;根据所述待输送位置信息控制所述龙门系统运动至待输送位置;根据所述型号信息控制所述夹爪伸缩至指定长度,使多个所述夹爪撑紧、夹持所述回转支撑;根据所述指定输送位置信息控制所述龙门系统带动所述夹具系统运动至指定位置。
在本发明实施例中,所述夹爪的一端和所述夹具主体连接,另一端设置有防滑垫,所述防滑垫设置有用于和所述回转支撑面贴合的弧形面。
在本发明实施例中,所述弧形面上设置有向远离所述夹具主体方向凸出的防滑凸起,所述防滑凸起的数量为多个,多个所述防滑凸起间隔设置于所述弧形面。
在本发明实施例中,所述夹具系统还包括设置于所述防滑垫内的压力检测器,所述压力检测器用于向所述控制器发送所述防滑垫和所述回转支撑之间的压力数值,所述控制器被配置为:获取所述压力数值和指定数值之间的压力差值;在所述压力差值在预设范围内的情况下,根据所述指定输送位置信息控制所述龙门系统带动所述夹具系统运动至指定位置。
在本发明实施例中,所述回转支撑工作站还包括报警器,所述控制器被进一步配置为:在所述压力差值未在预设范围内的情况下,控制所述报警器进行报警。
在本发明实施例中,所述夹具系统还包括支撑板,所述支撑板自所述夹爪底部向远离所述夹具主体的方向延伸,所述支撑板用于插入所述回转支撑的底部并支撑所述回转支撑。
在本发明实施例中,所述夹爪的数量为三个,任意相邻的两个所述夹爪之间互呈夹角,使三个所述夹爪形成三角撑紧结构。
在本发明实施例中,所述回转支撑工作站还包括位置检测组件,所述回转支撑工作站设置有上料区和下料区,所述拧紧机位于所述上料区和所述下料区之间,所述上料区和所述下料区均设置有所述检测组件,所述检测组件用于检测所述上料区和所述下料区内的回转支撑实时高度,所述控制器被进一步配置为:获取所述拧紧机的上料指令或下料指令;在接收到上料指令的情况下,根据所述上料区的回转支撑实时高度获取待输送位置信息,所述上料指令中包含指定输送位置信息;在接收到下料指令的情况下,根据所述下料区的回转支撑实时高度获取指定输送位置信息,所述下料指令包含待输送位置信息。
在本发明实施例中,所述位置检测组件包括多个沿上下方向设置的光电传感器,所述光电传感器用于检测所述回转支撑的有无。
在本发明实施例中,所述龙门系统和所述夹具主体之间通过直线模组连接。
通过上述技术方案,本发明实施例所提供的回转支撑工作站具有如下的有益效果:
回转支撑工作站工作时,在需要进行上料或下料情况下,控制器可获取上料或下料的待输送位置信息,然后根据待输送位置信息控制龙门系统进行X向、Y向以及Z向的运动控制,使龙门系统带动夹具系统运动至待输送位置,此时夹具系统伸入内环槽内,控制器可根据获取到的型号信息控制夹爪相对夹具主体伸缩到和内环槽内径匹配的长度,使多个夹爪配合撑紧回转支撑,从而能通过夹具系统夹持回转支撑,最后控制器可根据获取到的指定输送位置控制龙门系统运动,使龙门系统带动夹具系统上的回转支撑运动至指定位置,就能完成回转支撑的上料或下料。本发明能通过夹具系统、龙门系统和控制器实现回转支撑的自动上下料,可以减少用人,取消了现有技术中人工行车对回转支撑吊装的工序,减低了回转支撑上下料的工作节拍,大幅节约成本,同时解决了人工对正回转支撑与拧紧机有安全风险的问题。
本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本发明的理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
图1是根据本发明一实施例中回转支撑工作站的示意图;
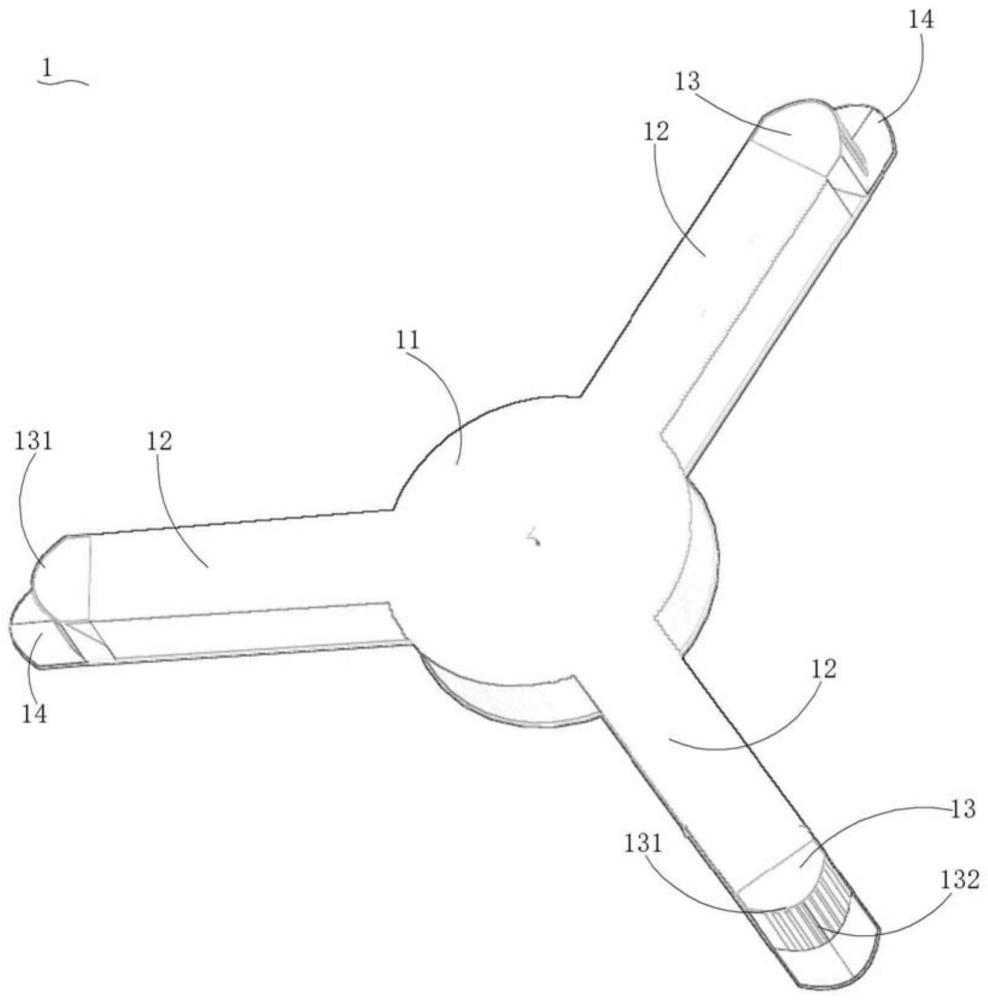
图2是根据本发明一实施例中回转支撑工作站的夹具系统结构示意图;
图3是根据本发明另一实施例中回转支撑工作站的夹具系统结构示意图;
图4是根据本发明再一实施例中回转支撑工作站的夹具系统结构示意图。
附图标记说明
标号 名称 标号 名称
100 回转支撑工作站 14 支撑板
1 夹具系统 2 龙门系统
11 夹具主体 3 直线模组
12 夹爪 4 上料区
13 防滑垫 5 下料区
131 弧形面 200 回转支撑
132 防滑凸起 300 拧紧机
具体实施方式
以下结合附图对本发明的具体实施例进行详细说明。应当理解的是,此处所描述的具体实施例仅用于说明和解释本发明,并不用于限制本发明。
下面参考附图描述根据本发明的回转支撑工作站。
如图1至图4所示,在本发明的实施例中,回转支撑工作站100,用于对拧紧机300进行回转支撑200上下料,回转支撑200设置有内环槽,回转支撑工作站100包括夹具系统1、龙门系统2和控制器;夹具系统1用于伸入所内环槽内,夹具系统1包括夹具主体11和安装于夹具主体11的多个可相对夹具主体11伸缩的夹爪12,多个夹爪12能同步伸缩,用于相互配合撑紧、夹持回转支撑200;龙门系统2用于驱动夹具系统1沿X向、Y向或Z向运动;控制器,被配置为:
获取待输送回转支撑200的待输送位置信息、型号信息和指定输送位置信息;
根据待输送位置信息控制龙门系统2运动至待输送位置;
根据型号信息控制夹爪12伸缩至指定长度,使多个夹爪12撑紧、夹持回转支撑200;
根据指定输送位置信息控制龙门系统2带动夹具系统1运动至指定位置。
可以理解地,本实施例中的夹爪12可通过伺服电机进行伸缩驱动,且每个夹爪12均连接有一个带有抱闸的伺服电机,针对不同型号的回转支撑200对应不同伺服参数,对于内环槽不同内径大小的回转支撑200,夹爪12的伺服电机根据不同型号,伸展不同长度,用于实现抓取回转支撑200。本实施例中的夹爪12可采用现有技术中的直线模组,直线模组可通过各个单元的组合实现负载的直线、曲线运动,使轻负载的自动化更加灵活、定位更加精准。夹爪12呈长条状,本实施例中X向为前后方向,Y向可为左右方向,Z向可为上下方向,通过X向、Y向以及Z向运动,能实现夹具系统1的三维空间运动控制。
本实施例中的回转支撑工作站100工作时,在需要进行上料或下料情况下,控制器可获取上料或下料的待输送位置信息,然后根据待输送位置信息控制龙门系统2进行X向、Y向以及Z向的运动控制,使龙门系统2带动夹具系统1运动至待输送位置,此时夹具系统1伸入内环槽内,控制器可根据获取到的型号信息控制夹爪12相对夹具主体11伸缩到和内环槽内径匹配的长度,使多个夹爪12配合撑紧回转支撑200,从而能通过夹具系统1夹持回转支撑200,最后控制器可根据获取到的指定输送位置控制龙门系统2运动,使龙门系统2带动夹具系统1上的回转支撑200运动至指定位置,就能完成回转支撑200的上料或下料。本实施例能通过夹具系统1、龙门系统2和控制器实现回转支撑200的自动上下料,可以减少用人,取消了现有技术中人工行车对回转支撑200吊装的工序,减低了回转支撑200上下料的工作节拍,大幅节约成本并提高上下料效率,同时解决了人工对正回转支撑200与拧紧机300有安全风险的问题。
如图2所示,夹爪12的一端和夹具主体11连接,另一端设置有防滑垫13,防滑垫13设置有用于和回转支撑200面贴合的弧形面131。本实施例中的夹具系统1和龙门系统2的数量可为两个且一一对应连接,两个夹具系统1分别用于上料和下料。本实施例中的夹具主体11呈圆柱形,多个夹爪12间隔设置于夹具主体11的侧壁,能共同深入回转支撑200的内环槽内,防滑垫13可采用硅胶垫,能提高夹具系统1和回转支撑200间的摩擦力,从而避免回转支撑200和夹爪12脱离的情况,另外防滑垫13外端的弧形面131,能加大防滑垫13和回转支撑200的抵接面积,从而进一步提高夹具系统1的稳定性。
在一实施例中,弧形面131上设置有向远离夹具主体11方向凸出的防滑凸起132,防滑凸起132的数量为多个,多个防滑凸起132间隔设置于弧形面131。在其他实施例中弧形面131设置有防滑格纹,本实施例中通过防滑凸起132作为防滑结构,能进一步提高防滑垫13的防滑效果,多个防滑凸起132配合,能加大弧形面131和回转支撑200间的摩擦力。
具体地,夹具系统1还包括设置于防滑垫13内的压力检测器,压力检测器用于向控制器发送防滑垫13和回转支撑200之间的压力数值,控制器被配置为:
获取压力数值和指定数值之间的压力差值;
在压力差值在预设范围内的情况下,根据指定输送位置信息控制龙门系统2带动夹具系统1运动至指定位置。
本实施例中,压力检测器可采用压力传感器,每个防滑垫13中均设置有压力传感器,控制器可通过压力传感器检测的压力数值和指定数值对比,获取压力差值,通过压力差值判断夹具系统1是否已经撑紧回转支撑200。需要说明的是,指定数值针对不同大小的回转支撑200具有不同的设定。本实施例中控制器能在确定回转支撑200被撑紧的情况下,允许下一步的龙门系统2运动,提高了回转支撑200上下料的稳定性和安全性。
在另一实施例中,回转支撑工作站100还包括报警器,控制器被进一步配置为:
在压力差值未在预设范围内的情况下,控制报警器进行报警。
本实施例中的报警器可采用声光报警器或文字报警器,控制器在压力差值未在预设范围的情况下,能自动报警,对操作人员进行预警,同时控制器可控制龙门系统2停机报错,从而避免夹具系统1对回转支撑200未夹紧而掉落的情况,还能使操作人员及时掌握回转支撑工作站100的工况,提高了回转支撑工作站100和操作人员之间的交互性能。
在本发明实施例中,夹具系统1还包括支撑板14,支撑板14自夹爪12底部向远离夹具主体11的方向延伸且前端呈弧形设置,支撑板14用于插入回转支撑200的底部并支撑回转支撑200。在多个夹爪12从内环槽对撑紧回转支撑200,同时位于防滑垫13底部,并向伸出的支撑板14能插入回转支撑200的底部,进行防掉落措施,本实施例中通过防滑垫13、夹爪12以及支撑板14的配合,能提高夹具系统1的稳定性和使用安全性。
如图2至图4所示,夹爪12的数量为三个,任意相邻的两个夹爪12之间互呈夹角,使三个夹爪12形成三角撑紧结构。在一实施例中,任意相邻的两个夹爪12之间的角度为一百二十度,从而使三个夹爪12对回转支撑200的支撑点形成等边三角形,利用三角形稳定性,能提高夹具系统1对回转支撑200的抓取稳定性。在其他实施例中夹爪12的数量可根据实际使用需求设置。
如图1所示,在一实施例中,回转支撑工作站100还包括位置检测组件,回转支撑工作站100设置有上料区4和下料区5,拧紧机300位于上料区4和下料区5之间,上料区4和下料区5均设置有检测组件,检测组件用于检测上料区4和下料区5内的回转支撑200实时高度,控制器被进一步配置为:
获取拧紧机300的上料指令或下料指令;
在接收到上料指令的情况下,根据上料区4的回转支撑200实时高度获取待输送位置信息,上料指令中包含指定输送位置信息;
在接收到下料指令的情况下,根据下料区5的回转支撑200实时高度获取指定输送位置信息,下料指令包含待输送位置信息。
本实施例中的控制器可在接收到拧紧机300的上料指令后开始上料,控制器可根据上料区4的回转支撑200实时高度获取待输送位置信息,确定回转支撑200在哪一层,控制龙门系统2,将夹具系统1移动到回转支撑200的内环槽内。接着控制器可根据拧紧机300传过来的型号信息,选择合适的夹具伺服参数,控制夹具系统1的3个夹爪12伸缩运行到指定位置,撑紧回转支撑200内环槽。控制器检测每个压力传感器的压力数值,在预设范围内则执行下一步,未在预设范围内则控制龙门系统2和夹具系统1停机报错,在确认压力差值在预设范围内的情况下,控制器控制龙门系统2将回转支撑200提起,并移动拧紧机300上方,然后根据上料指令中的指定输送位置信息将回转支撑200放置到指定位置,可实现回转支撑200的自动上下料,不需要人员进行吊装。在控制器获取到下料指令的情况下,可根据下料指令中的待输送位置信息控制龙门系统2运动,并根据下料区5的回转支撑200实时高度获取指定输送位置信息。本实施例中通过实时检测下料区5和上料区4的回转支撑200实时高度来确定龙门系统2的运动控制,进一步提高了回转支撑工作站100的自动化控制精度。
在本发明实施例中,位置检测组件包括多个沿上下方向设置的光电传感器,光电传感器用于检测回转支撑200的有无。本实施例中的上料区4设置有用于盛放回转支撑200的上料框,下料区5设置有用于盛放回转支撑200的下料框,上料框和下料框均设置有光电传感器,针对不同上、下料框中不同光电传感器的信号确认回转支撑200数量,从而确定龙门系统2要到达的位置,结构简单且便于维修和更换。具体地,龙门系统2和夹具主体11之间通过直线模组3连接。可提高夹具系统1相对龙门系统2升降控制的精度。
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种回转升降焊接工作站
- 回转支撑组件及具有该回转支撑组件的工程机械
- 一种回转支撑件及具有该回转支撑件的机械设备