一种锚索锚固深度判别方法
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及边坡防护技术领域。更具体地说,本发明涉及一种锚索锚固深度判别方法。
背景技术
公路、铁路工程涉及到山体开挖,形成大量高陡边坡,对边坡进行防护、保持高陡边坡的长期稳定性是工程重难点之一。对于岩体强度和结构较差的高陡边坡,通常采用锚索的方式进行锚固,该工艺具有机械设备利用率高、施工速度快及防护效果好的优点。锚索的锚固效果取决于锚固长度,即锚索在相对完整岩体中的埋置深度。这就要求在进行锚索钻孔过程中,及时判断钻入相对完整岩体的深度,确保其大于锚固长度,以满足设计锚固力。
设计上通常采用钻孔取芯的方式判断完整岩体的埋置深度,对钻孔取芯数量有着严格的要求。该技术存在钻孔成本高、地层判断粗放的缺点。
发明内容
本发明的一个目的是提供一种锚索锚固深度判别方法,具有操作简单、数据无线传输、适用性强等特点,为边坡防护中锚索锚固深度的判别提供决策。
为了实现根据本发明的这些目的和其它优点,提供了一种锚索锚固深度判别方法,在锚索钻孔过程中,获取钻机钻入土体的钻进深度,绘制钻进深度与净钻时间的曲线,根据曲线的斜率,判断完整地层对应的曲线段,完整地层曲线段对应的钻进深度即锚索锚固深度。
优选的是,具体包括如下步骤:
步骤S1、开发锚索钻孔深度监测装置,其用于获取钻机钻入土体的钻进深度;
步骤S2、将锚索钻孔深度监测装置安装于钻机的设定位置上;
步骤S3、通过锚索钻孔深度监测装置实时获取并计算钻机钻入土体的钻进深度,直至锚索钻孔完成;
步骤S4、绘制钻进深度与净钻时间的曲线,根据曲线的斜率,斜率最大的曲线段为完整地层对应的曲线段,其对应的钻进深度即锚索锚固深度。
优选的是,钻进深度与净钻时间的曲线绘制前还绘制有钻进深度与钻进时间的曲线图,其图中还包括钻进过程中排出岩屑时产生的非钻进引起的位移变化数据,将此数据剔除后形成的钻进深度与净钻时间的曲线才为最终判断曲线。
优选的是,非钻进引起的位移变化数据剔除方法为:非钻进过程中,位移出现急剧减小再增大的阶段定义为V形段,将V形段前一个位移参数作为起点,沿时间轴画一条横线,横线与V形段相交,取交点之后第一个点,与起点连接起来,即删除了一个非钻进过程的位移变化数据;以此类推,删除所有非钻进过程的位移变化数据,得到最终判断的钻进深度与净钻时间曲线。
优选的是,锚索钻孔深度监测装置包括拉绳位移传感器、电源、数据传输单元和终端,电源用于给数据传输单元供电,拉绳位移传感器用于采集动力头的位移数据,数据传输单元用于将拉绳位移传感器采集的数据传输给终端,终端用于无线接收数据并可以进行查看、下载以及计算处理数据,所述拉绳位移传感器连接于钻机的动力头上,且拉绳位移传感器的拉绳与动力头的运动方向保持平行。
优选的是,锚索钻孔深度监测装置安装于固定盒内,固定盒的一侧具有一通孔,其用于容纳所述拉绳位移传感器的拉绳伸出并连接至动力头上。
优选的是,固定盒的其中一侧面设置为活动门,所述电源安装于活动门的内侧。
优选的是,所述固定盒朝向所述动力头的底部设置通孔,所述固定盒通过固定架固定于钻机的滑槽上,所述固定架包括固定板和四个角钢,所述固定板固定于所述滑槽的设定位置上,四个角钢分别固定于所述固定架的四个角处,所述固定盒位于四个角钢形成的矩形空间内,且所述固定盒的长、宽、高尺寸均小于四个角钢形成的矩形空间,所述固定盒与所述角钢之间的间隙通过至少一块基础垫板填塞以调整拉绳位移传感器的拉绳与动力头的运动方向保持平行,所述固定盒通过绑带绑扎于所述滑槽上。
优选的是,所述活动门设置于所述固定盒位于滑槽正上方的顶面。
本发明至少包括以下有益效果:
本发明的锚索锚固深度判别方法易于实现、准确率高,相对于常规的钻孔取芯判别技术,节省了大量成本,并且做到了锚固深度的精细化判别。本发明的锚索锚固深度判别方法中涉及到的锚索钻孔深度监测装置具有元件价格便宜、组装简单、在钻机上安装便捷的特点,实现了监测数据的实时采集与远程传输功能。
本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
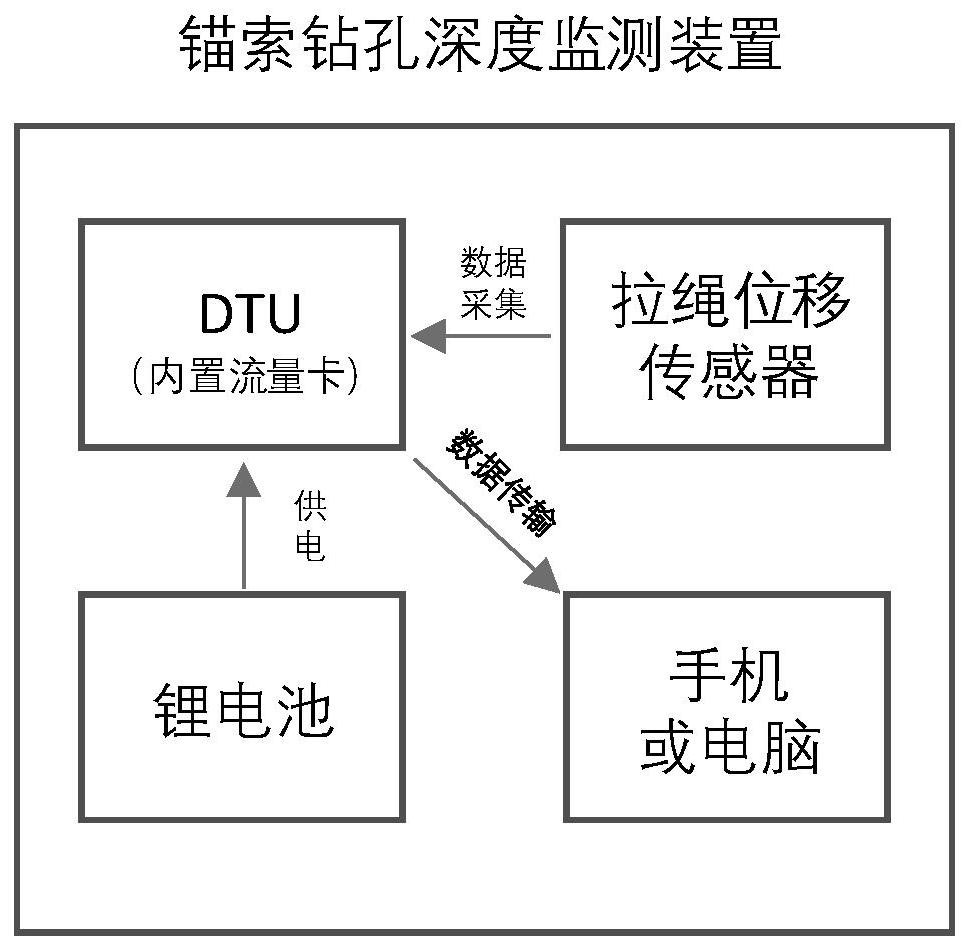
图1为本发明锚索钻孔深度监测装置组装示意图;
图2为本发明锚索钻孔深度监测装置在钻机上的安装示意图;
图3为本发明实测数据及非钻进产生的位移变化曲线;
图4为本发明根据钻进深度-净钻时间曲线判断锚固深度示意图;
图5为本发明固定盒的俯视图。
附图标记说明:
1、锚索钻孔深度监测装置,2、钻机,3、动力头,4、钻杆,5、钻头,6、滑槽,7、固定盒,8、活动门,9、角钢,10、固定板。
具体实施方式
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
需要说明的是,下述实施方案中所述实验方法,如无特殊说明,均为常规方法,所述试剂和材料,如无特殊说明,均可从商业途径获得;在本发明的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1至4所示,本发明提供一种锚索锚固深度判别方法,在锚索钻孔过程中,获取钻机2钻入土体的钻进深度,绘制钻进深度与净钻时间的曲线,根据曲线的斜率,判断完整地层对应的曲线段,完整地层曲线段对应的钻进深度即锚索锚固深度。
在上述技术方案中,现有的研究表明,岩石特征对钻孔响应有重要影响,通过记录钻进参数以监测钻机性能的随钻测量技术能够以高分辨率评估岩体变化的特性。特别是针对破碎岩体与完整岩体,其钻进速率存在明显的差异,利用钻进深度与净钻时间的关系判断岩体的完整性,从而获取不同的钻机深度下对应的不同地质层,从而获取完整地层对应的钻进深度,即为锚索锚固深度。
在另一种技术方案中,具体包括如下步骤:
步骤S1、开发锚索钻孔深度监测装置1,其用于获取钻机2钻入土体的钻进深度;
步骤S2、根据钻机2的特点,将锚索钻孔深度监测装置1安装于钻机2的设定位置上,本申请的一种实施例为安装于钻机2的滑槽6上且位于同样位于滑槽6上的动力头3在沿滑槽6方向的正上方,如图2所示,锚索钻孔深度监测装置1固定于钻机2动力头3的尾部,通过焊接或绑扎的方式固定,确保固定牢靠、严禁晃动;
步骤S3、通过锚索钻孔深度监测装置1实时获取并计算钻机2钻入土体的钻进深度,即采集钻孔数据,直至锚索钻孔完成;
步骤S4、绘制钻进深度与净钻时间的曲线,根据曲线的斜率,斜率最大的曲线段为完整地层对应的曲线段,其对应的钻进深度即锚索锚固深度。
在上述技术方案中,目前进行锚索钻孔的边坡钻机2,几乎没有配置随钻测量系统,本申请锚索钻孔深度监测装置1能够快速、便捷地安装于边坡钻机2之上,实现数据的采集及无线传输,快速判断钻头5钻入完整岩体的深度,为边坡防护中锚索锚固深度的判别提供决策。步骤S4根据钻进深度与净钻时间的关系曲线,判断锚索锚固深度,指绘制钻进深度与净钻时间曲线,根据曲线的斜率,判断破碎地层与完整地层,完整地层钻进深度即锚索锚固深度,破碎地层对应的曲线斜率较小,钻进速度慢;完整地层对应的曲线斜率较大,钻进速度快,见附图4所示。
在另一种技术方案中,如图3和图4所示,钻进深度与净钻时间的曲线绘制前还绘制有钻进深度与钻进时间的曲线图,其图中还包括钻进过程中排出岩屑时产生的非钻进引起的位移变化数据,将此数据剔除后形成的钻进深度与净钻时间的曲线才为最终判断曲线。
在上述技术方案中,步骤S3中采集钻孔数据,指锚索钻孔过程中,动力头3会推动钻杆4前端的钻头5冲击孔内岩体,高压气体将岩体碎屑与粉尘吹出孔外,钻头5、钻杆4与动力头3继续向孔内推进。固定在动力头3上的锚索钻孔深度监测装置1内的拉绳位移传感器记录钻进深度信息。步骤S3中计算钻进深度,指在钻进过程中钻机2遇破碎岩体时,钻机2机长会来回抽送钻杆4、钻头5,将破碎的岩屑排除孔外,该过程会产生非钻进引起的位移变化(见附图3所示),因此需要将该过程产生的数据剔除掉,剩余的数据才能代表钻进深度。
在另一种技术方案中,非钻进引起的位移变化数据剔除方法为:非钻进过程中,位移出现急剧减小再增大的阶段定义为V形段,将V形段前一个位移参数作为起点,沿时间轴画一条横线,横线与V形段相交,取交点之后第一个点,与起点连接起来,即删除了一个非钻进过程的位移变化数据;以此类推,删除所有非钻进过程的位移变化数据,得到最终判断的钻进深度与净钻时间曲线。
在上述技术方案中,非钻进产生的数据如图3中椭圆形线框所示,可知在正常钻进时,位移随时间增大,而非钻进过程中,位移出现急剧减小再增大的现象,定义为V形段。根据钻孔过程可知,位移的增大一定是由于钻头5冲击岩体,岩体破碎、进尺增加导致的。因此,只需将V形段前一个位移参数作为起点,沿时间轴画一条横线,横线与V形段相交,取交点之后第一个点,与起点连接起来,即删除了一个非钻进过程。以此类推,删除所有非钻进过程,得到钻进深度与净钻时间曲线。
在另一种技术方案中,如图1所示,锚索钻孔深度监测装置1包括拉绳位移传感器、电源、数据传输单元和终端,电源用于给数据传输单元供电,拉绳位移传感器用于采集动力头3的位移数据,数据传输单元用于将拉绳位移传感器采集的数据传输给终端,终端用于无线接收数据并可以进行查看、下载以及计算处理数据,所述拉绳位移传感器连接于钻机2的动力头3上,且拉绳位移传感器的拉绳与动力头3的运动方向保持平行。
在上述技术方案中,一种实施方式中,电源可以为可充电锂电池,数据传输单元为DTU,其内置流量卡,终端为手机或电脑终端。锂电池给DTU供电;DTU连接拉绳位移传感器,采集位移数据;内置于DTU中的流量卡将数据传输至手机或电脑终端;在DTU云服务平台查看或下载数据或计算处理数据。
在另一种技术方案中,锚索钻孔深度监测装置1安装于固定盒7内,固定盒7的一侧具有一通孔,其用于容纳所述拉绳位移传感器的拉绳伸出并连接至动力头3上。
在上述技术方案中,将锚索钻孔深度监测装置1涉及到的除终端外的其它模块固定于密封的金属或硬质塑料固定盒7内,在盒子一侧开通一个通孔,给拉绳位移传感器中的拉绳留出空间,从通孔拉出拉绳位移传感器上的拉绳,并垂直固定在动力头3上,拉绳与动力头3的运动方向保持平行,严禁倾斜拉出拉绳。
在另一种技术方案中,固定盒7的其中一侧面设置为活动门8,所述电源安装于活动门8的内侧。固定盒7设置一个便于开启的活动门8,方便替换锂电池或维修。
在另一种技术方案中,如图5所示,所述固定盒7朝向所述动力头3的底部设置通孔,所述固定盒7通过固定架固定于钻机2的滑槽6上,所述固定架包括固定板10和四个角钢9,所述固定板10固定于所述滑槽6的设定位置上,四个角钢9分别固定于所述固定架的四个角处,所述固定盒7位于四个角钢9形成的矩形空间内,且所述固定盒7的长、宽、高尺寸均小于四个角钢9形成的矩形空间,所述固定盒7与所述角钢9之间的间隙通过至少一块基础垫板填塞以调整拉绳位移传感器的拉绳与动力头3的运动方向保持平行,所述固定盒7通过绑带绑扎于所述滑槽6上。
在上述技术方案中,通过固定架初步定位固定盒7的位置,然后通过在固定盒7与固定架的底部填塞基础垫块实现固定盒7斜度的调节,通过固定盒7与固定架上不同位置角钢9之间的间隙填塞不同数量的基础垫块实现固定盒7平面位置的调节,从而实现精准调节拉绳位移传感器的拉绳与动力头3的运动方向保持平行,调整完成后再用绑定将固定盒7的位置固定,通过绑带及基础垫块双重设置,可以实现固定盒7固定的牢固。基础垫块为较薄的钢结构垫块。
在另一种技术方案中,所述活动门8设置于所述固定盒7位于滑槽6正上方的顶面,一方面活动门8设置于顶面可以在重力作用下与固定盒7连接更为稳固,另一方面通过绑带绑扎固定盒7后也可以将活动门8绑扎更紧。
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
- 岩质边坡锚索锚固段地质条件判别及位置长度调整方法
- 深部沿空顺槽实体煤侧巷帮锚索锚固深度确定方法