一种带有收放线机构的线控管道爬行机器人
文献发布时间:2024-01-17 01:15:20
技术领域
本发明涉及爬行机器人技术领域,具体为一种带有收放线机构的线控管道爬行机器人。
背景技术
随着经济和社会建设的发展,机器人技术已经在各行各业中得到了广泛的发展和应用,其研究和应用水平已成为衡量国家科技发展水平(尤其是工业自动化、智能化水平)的重要标志之一。在形形色色的机器人中,管道爬行机器人是比较特殊的一种。由于我国现代工农业及国防领域中使用着大量管道,如煤气管道、污水管道、空调管道等,这些管道的正常运转对维持广大人民群众的日常生活及城市的正常运转具有重要意义。但是由于管道结构的特殊性,出现管道老化或损坏现象后很难检测或维修;一些重要的管道,如煤气管道,一旦出现裂缝将造成极大的安全隐患。因此,对于管道爬行机器人的研究显得至关重要。
经检索发现现有技术中如公开号CN114623314A一种超声检测用管道爬行机器人,包括主支架、行走机构以及检测设备安装架;所述主支架整体呈两端开口的圆筒状,主支架作为结构的主体,主支架的内部中心处设有检测设备安装架,主支架的侧壁上成环形阵列设有三组行走机构;所述检测设备安装架呈圆筒状,检测设备安装架的一端开口设置,检测设备安装架的开口端的内壁设有内螺纹,检测设备安装架的开口端螺纹连接有封盖,封盖的中心处开设有走线孔,检测设备安装架用于安装超声检测的探头和设备;本发明适用于传统超声检测探头难以进入的管道内部,便于配合超声检测设备使用。
上述管道爬行机器人适用于传统超声检测探头难以进入的管道内部,便于配合超声检测设备使用,但上述管道爬行机器人后期需人工对连接的线缆进行收放,较为不便,因此提出一种带有收放线机构的线控管道爬行机器人,以解决上述问题。
发明内容
本发明的目的在于提供一种带有收放线机构的线控管道爬行机器人,以解决上述背景技术中提出的管道爬行机器人不具备收放线功能的问题。
为实现上述目的,本发明提供如下技术方案:一种带有收放线机构的线控管道爬行机器人,包括主支架,所述主支架内部中心处设有检测设备运行机构,且主支架侧壁上成环形阵列设有三组行走机构,所述检测设备运行机构一侧通过电缆与收放线机构相连接,所述收放线机构包括箱体,且箱体电缆口外侧安装有定位筒,所述箱体内部依次设置有放线机构、第一导向辊、增阻套筒、张紧调节机构、均匀收卷机构以及收线辊机构;所述放线机构包括回形安装架,且回形安装架底部通过支撑架与箱体内侧底部相连接,所述回形安装架顶部设置有第一电机,且第一电机输出端与回形安装架内部设置的移动机构相连接,所述移动机构底部与U型安装槽顶部相连接,且U型安装槽内侧设置有传动辊体,所述传动辊体两端通过轴承铰接在U型安装槽的两个侧板上,且传动辊体下方设置有驱动辊体,所述驱动辊体与回形安装架内部转动连接,且驱动辊体一端与回形安装架外侧设置的第二电机相连接。
优选的,所述定位筒为喇叭形,定位筒的入口的尺寸大于出口尺寸。
通过上述技术方案:对电缆进线位置进行限定。
优选的,所述移动机构包括第一齿轮,且第一齿轮一端与第一电机相连接,所述第一齿轮外侧与对称设置的第二齿轮相啮合,且第二齿轮内侧与螺纹杆相连接,所述螺纹杆外侧与套筒相连接,且套筒底部与U型安装槽顶部相连接。
通过上述技术方案:带动U型安装槽进行移动。
优选的,所述回形安装架内部设置有与套筒滑动连接的限位板。
通过上述技术方案:对套筒的移动位置进行限定。
优选的,所述增阻套筒一端与隔板相连接,且隔板上开设有与增阻套筒相匹配的电缆移动口。
通过上述技术方案:增大电缆移动时的阻力。
优选的,增阻套筒包括安装套筒,所述安装套筒内侧包覆有一层阻力层,且阻力层内侧设置有若干组凸点。
通过上述技术方案:增大电缆移动时的阻力。
优选的,所述张紧调节机构包括安装板,且安装板一侧设置有第二导向辊、张紧辊以及第三导向辊,所述张紧辊一侧与安装板内部设置的第一电动丝杆机构相连接。
通过上述技术方案:对电缆张紧度进行调节。
优选的,所述均匀收卷机构包括支撑柱,且支撑柱顶部设置有支撑板,所述支撑板上方设置有滑槽,且支撑板上表面的中部固定连接有压力传感器,所述压力传感器置于滑槽底侧的中部,且压力传感器与滑槽的下表面贴合,所述支撑板上对称开设有限位槽,所述限位槽内部滑动连接有限位杆,且限位杆的顶端与滑槽底部相连接。
通过上述技术方案:对张紧度进行检测。
优选的,所述滑槽内侧底部设置有第二电动丝杆机构,且第二电动丝杆机构外侧通过移动块与分隔板上方设置的固定架相连接,所述固定架内侧通过轴承转动连接有转动辊。
通过上述技术方案:便于电缆均匀分布在收线辊机构外侧。
与现有技术相比,本发明的有益效果是:该带有收放线机构的线控管道爬行机器人,
(1)本装置为解决管道爬行机器人不具备收放线功能的问题,通过将检测设备运行机构一侧通过电缆与收放线机构相连接,当需要对电缆进行收卷时,开启收线辊机构,在收线辊机构的作用下外界电缆进入箱体内部,并且依次通过放线机构、第一导向辊、增阻套筒、张紧调节机构、均匀收卷机构最终在收线辊机构外侧进行收卷,当需要对电缆进行放卷时,开启收线辊机构以及放线机构,在收线辊机构旋转的作用下对收卷辊外侧的电缆进行松放,在放线机构的作用下松放的电缆依次通过均匀收卷机构、张紧调节机构、增阻套筒、第一导向辊最终从箱体开设的电缆口移动到箱体外侧。
(2)本装置为解决电缆收放时无法对电缆的张紧度进行调节的问题,通过在箱体内部安装张紧调节机构,可通过调节张紧调节机构中的张紧辊所在高度,从而使电缆张紧度得到调节。
(3)本装置为解决电缆在收线辊外侧收线不均的问题,通过在收线辊机构一侧安装均匀收卷机构,电缆经转动辊移动至收线辊外侧,第二电动丝杆机构可以带动转动辊进行匀速移动,从而使电缆进行移动,便于电缆均匀分布在收线辊外侧。
(4)本装置为解决电缆在箱体内部的张紧度无法进行检测的问题,通过在滑槽底部设置压力传感器,压力传感器能够检测滑槽的挤压力度,进一步检测转动辊上方电缆的张紧力度。
附图说明
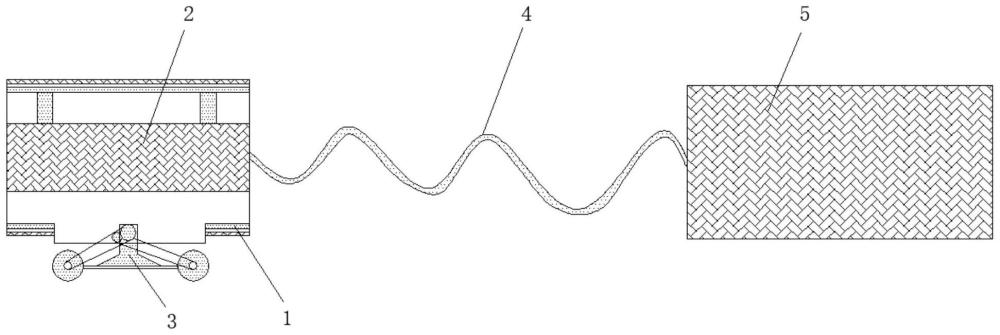
图1为本发明整体正视剖面结构示意图;
图2为本发明收放线机构结构示意图;
图3为本发明定位筒结构示意图;
图4为本发明放线机构结构示意图;
图5为本发明放线机构侧视剖面结构示意图;
图6为本发明增阻套筒结构示意图;
图7为本发明张紧调节机构结构示意图;
图8为本发明A处放大结构示意图;
图9为本发明滑槽内部结构示意图。
图中:1、主支架;2、检测设备运行机构;3、行走机构;4、电缆;5、收放线机构;501、箱体;502、定位筒;503、放线机构;5031、回形安装架;5032、第一电机;5033、移动机构;50331、第一齿轮;50332、第二齿轮;50333、螺纹杆;50334、套筒;50335、限位板;5034、U型安装槽;5035、传动辊体;5036、驱动辊体;5037、第二电机;504、第一导向辊;505、增阻套筒;5051、安装套筒;5052、阻力层;506、张紧调节机构;5061、安装板;5062、第二导向辊;5063、张紧辊;5064、第三导向辊;5065、第一电动丝杆机构;507、均匀收卷机构;5071、支撑柱;5072、支撑板;5073、滑槽;5074、压力传感器;5075、限位杆;5076、第二电动丝杆机构;5077、移动块;5078、固定架;5079、转动辊;508、收线辊机构;509、隔板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-9,本发明提供一种技术方案:一种带有收放线机构的线控管道爬行机器人,根据图1所示,主支架1内部中心处设有检测设备运行机构2,且主支架1侧壁上成环形阵列设有三组行走机构3。
在进一步实施例中,主支架1、检测设备运行机构2以及行走机构3为现有技术,不做过多描述。
根据图1-9所示,检测设备运行机构2一侧通过电缆4与收放线机构5相连接。
具体的,收放线机构5包括箱体501,且箱体501电缆口外侧安装有定位筒502,箱体501内部依次设置有放线机构503、第一导向辊504、增阻套筒505、张紧调节机构506、均匀收卷机构507以及收线辊机构508。
在进一步实施例中,定位筒502为喇叭形,定位筒502的入口的尺寸大于出口尺寸,定位筒502可以对电缆4进入箱体501的位置起到一定的限制作用。
具体的,放线机构503包括回形安装架5031,且回形安装架5031底部通过支撑架与箱体501内侧底部相连接,回形安装架5031顶部设置有第一电机5032,且第一电机5032输出端与回形安装架5031内部设置的移动机构5033相连接,移动机构5033底部与U型安装槽5034顶部相连接,且U型安装槽5034内侧设置有传动辊体5035,传动辊体5035两端通过轴承铰接在U型安装槽5034的两个侧板上,且传动辊体5035下方设置有驱动辊体5036,驱动辊体5036与回形安装架5031内部转动连接,且驱动辊体5036一端与回形安装架5031外侧设置的第二电机5037相连接。
在进一步实施例中,移动机构5033包括第一齿轮50331,且第一齿轮50331一端与第一电机5032相连接,第一齿轮50331外侧与对称设置的第二齿轮50332相啮合,且第二齿轮50332内侧与螺纹杆50333相连接,螺纹杆50333外侧与套筒50334相连接,且套筒50334底部与U型安装槽5034顶部相连接。
在进一步实施例中,回形安装架5031内部设置有与套筒50334滑动连接的限位板50335,限位板50335可以对套筒50334的移动位置进行一定程度的限定。
使用时,开启第一电机5032,在第一电机5032的作用下第一齿轮50331进行旋转,从而带动第二齿轮50332以及螺纹杆50333进行转动,在螺纹杆50333旋转的作用下套筒50334进行移动,从而带动U型安装槽5034以及传动辊体5035进行移动,当传动辊体5035与电缆4外侧紧贴时,此时开启第二电机5037,在第二电机5037的作用下驱动辊体5036进行旋转,从而带动驱动辊体5036上方的电缆4进行移动,使电缆4移动至箱体501外侧。
具体的,增阻套筒505一端与隔板509相连接,且隔板509上开设有与增阻套筒505相匹配的电缆移动口。
具体的,增阻套筒505包括安装套筒5051,安装套筒5051内侧包覆有一层阻力层5052,且阻力层5052内侧设置有若干组凸点。
在进一步实施例中,增阻套筒505的设置可以增大电缆4移动时的阻力,从而使收线辊机构508进行收卷时,隔板509靠近收线辊机构508一侧的电缆4具有一定的张紧力,从而减小电缆4收卷过程中出现跑偏脱离的情况发生。
具体的,张紧调节机构506包括安装板5061,且安装板5061一侧设置有第二导向辊5062、张紧辊5063以及第三导向辊5064,张紧辊5063一侧与安装板5061内部设置的第一电动丝杆机构5065相连接。
在进一步实施例中,第一电动丝杆机构5065包括丝杆电机,且丝杆电机输出端与安装板5061内部设置的丝杆机构相连接,丝杆机构外侧通过安装块与张紧辊5063相连接,通过调节张紧调节机构506中的张紧辊5063所在高度,从而使电缆4张紧度得到调节。
具体的,均匀收卷机构507包括支撑柱5071,且支撑柱5071顶部设置有支撑板5072,支撑板5072上方设置有滑槽5073,且支撑板5072上表面的中部固定连接有压力传感器5074,压力传感器5074置于滑槽5073底侧的中部,且压力传感器5074与滑槽5073的下表面贴合,支撑板5072上对称开设有限位槽,限位槽内部滑动连接有限位杆5075,且限位杆5075的顶端与滑槽5073底部相连接。
在进一步实施例中,压力传感器5074能够检测滑槽5073的挤压力度,进一步检测转动辊5079上方电缆4的张紧力度。
具体的,滑槽5073内侧底部设置有第二电动丝杆机构5076,且第二电动丝杆机构5076外侧通过移动块5077与分隔板上方设置的固定架5078相连接,固定架5078内侧通过轴承转动连接有转动辊5079。
在进一步实施例中,第二电动丝杆机构5076与第一电动丝杆机构5065结构相同。
在进一步实施例中,电缆4经转动辊5079移动至收线辊机构508外侧,第二电动丝杆机构5076可以带动转动辊5079进行匀速移动,从而使电缆4进行移动,便于电缆4均匀分布在收线辊机构508外侧。
在进一步实施例中,收线辊机构508包括收线辊,且收线辊一端与正反电机输出端相连接。
当需要对电缆4进行收卷时,开启收线辊机构508,在收线辊机构508的作用下外界电缆4进入箱体501内部,并且依次通过放线机构503、第一导向辊504、增阻套筒505、张紧调节机构506、均匀收卷机构507最终在收线辊机构508外侧进行收卷,当需要对电缆4进行放卷时,开启收线辊机构508以及放线机构503,在收线辊机构508反向旋转的作用下对收卷辊外侧的电缆4进行松放,在放线机构503的作用下松放的电缆4依次通过均匀收卷机构507、张紧调节机构506、增阻套筒505、第一导向辊504最终从箱体501开设的电缆口移动到箱体501外侧。
术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为便于描述本发明的简化描述,而不是指示或暗指所指的装置或元件必须具有特定的方位、为特定的方位构造和操作,因而不能理解为对本发明保护内容的限制。
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种管道爬行机器人上的驱动机构
- 一种管道爬行机器人
- 一种用于管道爬行的反恐机器人
- 一种管道检测爬行机器人尾线连接器
- 一种爬行式管道机器人行走机构