一种子母式无人机
文献发布时间:2024-01-17 01:19:37
技术领域
本发明涉及无人机技术领域,尤其涉及一种子母式无人机。
背景技术
随着无人机技术的发展,无人机越来越多的应用到远距离精准投放物资上,这就需要无人机能够实现长时间和长航程的飞行,且能够装载较多的物资。
现有的无人机要实现长时间和长航程飞行,无人机的体积就比较大,起飞重量大,且需要采用气动布局稳定性高的布局方式。其中,体积大会导致无人机的目标大,容易被击毁;起飞重量大会导致飞机笨重,最小速度高,投放精度差;稳定性高的气动布局和大体积会导致飞机的机动性、灵活性差。此外,为了实现对指定地点的投放补给,需要无人机的体积较小,灵活性高,而较高的机动性灵活性和较小的体积导致无人机起飞重量小,无法装载更多的能源来实现长航时飞行。
发明内容
鉴于上述的分析,本发明实施例旨在提供一种子母式无人机,用以解决现有的无人机不能兼顾灵活性和实现长航时的问题。
本发明的目的主要是通过以下技术方案实现的:
一种子母式无人机,包括母机、至少两个子机和挂架,所述母机包括母机机翼,所述子机通过相对应的所述挂架对称安装在两个所述母机机翼的下方;
所述挂架包括固定连接机构、挂架固定板、挂架前挂点和挂架后挂杆,所述固定连接机构一端固定于所述母机机翼上,另一端与所述挂架固定板相连,所述挂架固定板为三角形板,所述挂架前挂点设在所述挂架固定板顶角下方,所述挂架后挂杆固定在所述挂架固定板的底边;
所述子机设有子机前挂点和子机后挂杆,所述子机前挂点和子机后挂杆分别与所述挂架前挂点及所述挂架后挂杆配合,所述子机后挂杆沿所述子机中心轴对称设置。
进一步地,所述固定连接机构外围设有横截面为对称翼型的挂架整流罩,所述挂架整流罩的上表面与所述母机机翼的下蒙皮紧密贴合,下表面与所述挂架固定板紧密贴合;
所述挂架前挂点位于所述挂架整流罩横截面对称轴上,每个所述子机的两个所述子机后挂杆挂在所述挂架后挂杆上且对称分布在所述挂架整流罩的两侧。
进一步地,所述挂架后挂杆为表面光滑的圆管,所述子机后挂杆具有半圆开口,半圆开口的方向朝向所述子机的机头方向。
进一步地,所述子机前挂点位于所述子机重心的正上方。
进一步地,所述子机后挂杆包括挂钩、底座和调整螺钉;所述底座与所述子机可拆卸连接,所述挂钩和所述底座通过所述调整螺钉固定,所述挂钩上沿所述子机后挂杆的长度方向设有长条形凹槽。
进一步地,所述挂架前挂点为上小下大的圆台形凹槽,所述子机前挂点为上小下大的圆台形凸台,所述凸台与所述凹槽相适配。
进一步地,所述挂架安装在所述母机机翼远离所述母机的机身预设距离的柱梁上。
进一步地,所述挂架还包括挂架螺栓,所述挂架通过所述挂架螺栓与所述母机机翼连接。
进一步地,所述挂架前挂点位于所述挂架整流罩的横截面的对称轴上。
进一步地,所述子机前挂点与所述挂架前挂点通过电磁的方式固定。
进一步地,所述子机后挂杆与所述挂架后挂杆接触区域为导电材料;所述子机处于挂载状态时,所述挂架前挂点与两个子机后挂杆所在电路形成回路。
进一步地,所述子机前挂点为钕磁铁,所述挂架前挂点为电磁铁。
进一步地,所述子机还包括子机小翼,所述子机小翼的翼尖向下。
进一步地,子机还包括载荷舱,载荷舱用于装载待投放的物资,载荷舱位于子机重心的正下方。
进一步地,母机还包括控制模块,控制模块能够获取投放指令以及母机的当前飞行速度,当检测到母机的飞行速度为预设阈值时,执行子机的投放任务,预设阈值为子机的巡航速度。
一种子母式无人机的物资投放方法,包括以下步骤:
步骤1:将待投放物资分别放进各子机的载荷舱内,并将载荷舱分别装进子机上;
步骤2:母机上电,使得挂架前挂点的电磁铁上电;
步骤3:将各子机分别安装于母机机翼两端;
步骤4:调整子机的子机后挂杆挂钩的高度,保持子机与母机相对平行;
步骤5:子机上电,启动母机发动机和螺旋桨;
步骤6:母机起飞;
步骤7:到达指定位置,挂架前挂点电磁铁断电,子机与母机分离。
进一步地,还包括以下步骤:
步骤8:子机与母机分离后,启动子机螺旋桨,母机返航降落;
步骤9:子机到达指定位置,投放载荷舱;
步骤10:子机完成任务后,到达附近降落点,打开子机降落伞降落。
进一步地,步骤4中,通过调整子机后挂杆的调整螺钉在挂钩的长条型凹槽中的位置来调整子机后挂杆的长度,进而调整子机与母机之间的平行度。
进一步地,步骤6中,当子机前挂点或任意一个子机后挂杆与挂架分离时,挂架前挂点会自动断电,使子机能够完全脱离母机。
进一步地,步骤7中,当检测到母机的飞行速度为预设阈值时,基于子机投放指令执行子机的投放任务,否则需先调节母机的飞行速度至预设阈值后再执行子机的投放任务。
本发明示例性实施例中提供的一个或多个技术方案中,至少可实现如下有益效果之一:
(1)本实施例中,当需要执行任务时,首先由母机携带子机到达指定位置,然后子机和母机分离,母机返航,子机到达指定位置投放携带的物资,随后子机自行到达降落点降落;本实施例的母机携带子机的子母式无人机结构,一方面能够通过母机实现长时间长航程的飞行,另一方面,子机具有体积小、灵活性高的特点,从而实现对指定地点的投放补给。
(2)本实施例的挂架前挂点为上小下大的圆台形凹槽结构,子机前挂点为上小下大的圆台形凸台结构,凸台与凹槽相适配,挂架前挂点吸住子机前挂点之后,子机前挂点的凸台位于挂架前挂点的凹槽内,从而限制子机与母机之间水平方向的相对运动,同时还保证了挂架前挂点的吸力解除后,子机在飞行方向所受到的阻力作用下使凸台能够顺利脱离出凹槽。
(3)本实施例的挂架后挂杆表面为金属涂层,子机后挂杆为金属材料,挂架前挂点的电磁铁的电路与两个子机后挂杆形成回路,当子机前挂点或任意一个子机后挂杆与挂架分离时,挂架前挂点会自动断电,使子机能够完全脱离,保障母机与子机的安全。
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
附图示出了本发明的示例性实施方式,并与其说明一起用于解释本发明的原理,其中包括了这些附图以提供对本发明的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
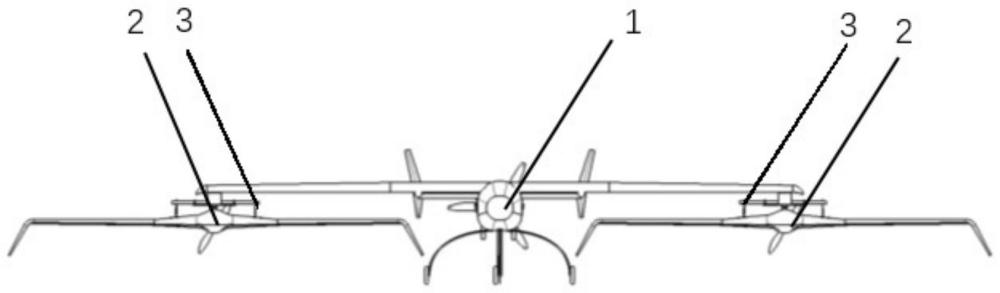
图1是具体实施例的子母式无人机的结构示意图。
图2是具体实施例的母机的结构示意图。
图3是具体实施例的挂架的主视图。
图4是具体实施例的挂架的俯视图。
图5是具体实施例的子机的结构示意图。
图6是具体实施例的子机后挂杆的结构示意图;
图7是具体实施例的挂架前挂点的结构示意图;
图8是具体实施例的子机前挂点的结构示意图;
图9是具体实施例的子机与母机的连接示意图。
附图标记:
1-母机,11-母机机翼,12-起落架,2-子机,21-子机前挂点,22-子机后挂杆,221-挂钩,222-底座,223-调整螺钉,23-子机机翼,231-子机小翼,24-载荷舱,3-挂架,31-挂架前挂点,32-挂架后挂杆,33-挂架整流罩,34-挂架固定卡,35-挂架固定板,36-挂架螺栓。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本发明一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
无人机应用于物资投放时,通常需要同时满足远距离飞行及精准投放。为了能够实现远距离飞行,需要无人机具有较大的体积和起飞重量,为了实现精准投放,需要无人机的体积较小,灵活性高。现有的无人机无法兼顾以上两方面的性能。
针对上述问题,本发明的一个具体实施例,如图1所示,公开了一种子母式无人机,包括母机1、至少两个子机2和挂架3,母机1包括母机机翼11,子机2通过相对应的挂架3安装在两个母机机翼11的下方。
本实施例中,当需要执行任务时,首先由母机1携带子机2到达指定位置,然后子机2和母机1分离,母机1返航,子机2到达指定位置投放携带的物资,随后子机2自行到达降落点降落。本实施例的母机1携带子机2的子母式无人机结构,一方面能够通过母机1实现长时间长航程的飞行,另一方面,子机2具有体积小、灵活性高的特点,从而实现对指定地点的投放补给。
本实施例中,如图2所示挂架3安装在母机机翼11的下表面。优选地,挂架3安装在母机机翼11的尖端,使得挂架3距离母机1机身的距离最远,从而能够适应较大尺寸的子机2。
具体地,如图3和图4所示,挂架3包括挂架前挂点31、挂架后挂杆32、固定连接机构和挂架固定板35。固定连接机构一端固定于母机机翼11上,另一端与挂架固定板35相连,挂架固定板35为三角形板,挂架固定板35顶角下方设有挂架前挂点31,底边固定有挂架后挂杆32。
进一步地,固定连接机构外围设有横截面为对称翼型的挂架整流罩33,减少飞行过程中的阻力。挂架整流罩33的上表面与母机机翼11的下蒙皮紧密贴合,下表面与挂架固定板35紧密贴合,上下表面起到结构加强的作用。
优选地,挂架3通过挂架螺栓36与母机机翼11连接。
本实施例中,挂架整流罩33通过环氧树脂胶粘在挂架固定板35上。
进一步地,挂架固定板35为三角形薄板,挂架固定板35的底边与挂架整流罩33的横截面的对称轴垂直。挂架固定板35的两个底角对称设有两个挂架固定卡34,用于固定挂架后挂杆32。
本实施例中,挂架前挂点31位于挂架整流罩33的横截面的对称轴上,挂架后挂杆32为表面光滑的圆管,挂架后挂杆32垂直于整流罩的横截面的对称轴,使得挂架前挂点31与后挂点一起形成稳定的三角形结构,增加了子机2的稳定性。
进一步地,如图5所示,子机2设有子机前挂点21和子机后挂杆22,分别与挂架前挂点31及挂架后挂杆32配合,子机后挂杆22沿子机2中心轴对称设置。
进一步地,如图9所示,每个子机2的两个子机后挂杆22挂在挂架后挂杆32上且对称分布在挂架整流罩33的两侧。
具体地,子机前挂点21与挂架前挂点31通过电磁的方式固定。
优选地,子机前挂点21为钕磁铁,挂架前挂点31为电磁铁,电磁铁上电后产生磁场,将钕磁铁吸住。
进一步地,子机后挂杆22具有半圆开口,半圆的半径与挂架后挂杆32的半径相匹配,半圆开口的方向朝向子机机头方向。
进一步地,如图6所示,子机后挂杆22包括挂钩221、底座222和调整螺钉223。底座222与子机2可拆卸连接,挂钩221和底座222通过调整螺钉223固定。
进一步地,挂钩221上沿子机后挂杆22的长度方向设有长条形凹槽,从而通过调整螺钉223来调整子机后挂杆22的长度,进而调整子机2与母机1之间的平行度。
进一步地,为了限制子机2与母机1之间水平方向的位移,如图7和图8所示,挂架前挂点31为上小下大的圆台形凹槽结构,子机前挂点21为上小下大的圆台形凸台结构,凸台与凹槽相适配,凸台与凹槽交叠的深度h在预设范围内,可依据子机的大小及脱离时的巡航速度来调节,优选为5mm≤h≤8mm,凹槽的倾斜面与底面的夹角小于90°,优选为30-45°。挂架前挂点31吸住子机前挂点21之后,子机前挂点21的凸台位于挂架前挂点31的凹槽内,从而限制子机2与母机1之间水平方向的相对运动,同时还保证了挂架前挂点31的吸力解除后,子机2在飞行方向所受到的阻力作用下使凸台能够顺利脱离出凹槽。
本实施例中,母机1还包括起落架12,母机1通过起落架12滑跑起降。
进一步地,母机1还包括尾翼,尾翼为双尾撑、双垂尾结构,从而增加母机1飞行过程中的稳定性。
本实施例中,挂架3安装在母机机翼11远离母机1机身预设距离的柱梁上,预设距离根据子机2的翼展确定。
进一步地,为了增大子机2的翼展,当每个母机机翼11下挂载多个子机2时,最外侧的子机2优选地设在母机机翼11内部柱梁的最顶端,使得子机2之间的距离达到最大值,从而能够适应较大尺寸的子机2。
本实施例中,如图5所示,子机机翼23的子机小翼231向下,防止子机2与母机1分离后,子机小翼231与母机1尾翼碰撞。
进一步地,子机2还包括降落伞和载荷舱24,降落伞用于子机2的降落,载荷舱24用于装载待投放的物资。
进一步地,载荷舱24位于子机2重心的正下方,保证飞行过程中子机2的稳定性。
进一步地,子机前挂点21位于子机2重心的正上方,子机前挂点21承受子机2主要重力,并限制子机2水平和垂直方向的移动;子机后挂杆22限制子机2横滚和俯仰运动,保证子机2与母机1的相对稳定。
进一步地,为了避免在飞行过程中遇到特殊情况(如受到乱流等不利的环境因素的影响)时,导致子机后挂杆22与挂架3后挂点异常脱落,此时由于母机1未执行分离指令,子机前挂点21与挂架前挂点31未分离,可能导致子机2碰撞母机1,影响子机2和母机1的安全,本实施例的子母式无人机设有冗余控制系统。
具体地,挂架后挂杆32表面为金属涂层,子机后挂杆22与挂架后挂杆32接触区域为导电材料,子机2处于挂载状态时,挂架前挂点31的电磁铁的电路与两个子机后挂杆22形成回路,当子机前挂点21或任意一个子机后挂杆22与挂架3分离时,挂架前挂点31会自动断电,使子机2能够完全脱离,保障母机1与子机2的安全。此时,母机1携带未脱离的子机2继续执行任务,脱离的子机2打开降落伞,自行降落。
进一步地,母机1投放子机2之前,在飞行过程中,子机2会产生向上的升力,如果子机2与母机1分离时的速度过大,子机2的升力大于重力,分离后子机2会向上爬升,子机小翼231的翼尖与母机1的尾翼可能发生碰撞。子机2与母机1分离时的速度过小,子机2的升力小于重力,分离时子机后挂杆22的挂钩221不容易脱落。本实施例中,母机1与子机2分离时的速度为子机2的巡航速度,即子机2的升力等于其自身重力时对应的飞行速度。
具体地,本实施例的母机1还包括控制模块,控制模块能够获取投放指令以及母机1的当前飞行速度,当检测到母机1的飞行速度为预设阈值时,基于所述子机投放指令执行子机2的投放任务,否则需先调节母机1的飞行速度至预设阈值后再执行子机2的投放任务,从而避免子机2被投放后与母机1碰撞,或者子机2被投放后不能与母机1有效脱离。其中,预设阈值的取值范围为(1±5%)倍的子机2巡航速度,优选为子机2的巡航速度。
本实施例的子母式无人机的物资投放方法包括以下步骤:
步骤1:将待投放物资分别放进各子机2的载荷舱24内,并将载荷舱24分别装进子机2上。
步骤2:母机1上电,使得挂架前挂点31的电磁铁上电。
步骤3:将各子机2分别安装于母机机翼11两端。
步骤4:调整子机后挂杆22的挂钩221的高度,保持子机2与母机1相对平行。
步骤5:子机2上电,启动母机1发动机和螺旋桨。
步骤6:母机1起飞。
步骤7:到达指定位置,挂架前挂点31电磁铁断电,子机2与母机1分离。
步骤8:子机2与母机1分离后,启动子机2螺旋桨,母机1返航降落。
步骤9:子机2到达指定位置,投放载荷舱24。
步骤10:子机2完成任务后,到达附近降落点,打开子机2降落伞降落。
本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本发明,而并非是对本发明的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本发明的范围内。
- 子母式无人机信包箱及其派件方法
- 一种子母式无人机投放决策及路径规划一体化方法及系统
- 一种子母式无人机地面试验装置