套入式腔镜取物袋
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及医疗器械领域,更具体地说涉及一种套入式腔镜取物袋。
背景技术
腔镜手术标本切除后需要用取物袋将标本取出。一般在取标本时需要用器械将标本放置到取物袋内,收紧袋口再取出。现在市面上广泛使用的取物袋利用一个握持柄进行拿取,取物袋通过收口处设置的环形钢索与握持柄进行连接,利用收放钢索完成取物袋开口的开合控制。这类产品在使用中存在以下问题,首先,在手术过程中,单一的夹持钳往往操作比较困难,需要取物袋上的支撑结构对组织进行限制,便于手术操作,但是通过钢索连接的取物袋无法做到这一点。其次,钢索类收口结构存在封闭困难,容易使组织滑出的问题,不利于使用。
发明内容
本发明克服了现有技术中的不足,提供了一种套入式腔镜取物袋。
本发明的目的通过下述技术方案予以实现。
套入式腔镜取物袋,包括外杆体、内杆体、连接固定板、抓取钳和收纳袋,所述外杆体内侧设有所述内杆体,所述内杆体通过所述连接固定板和所述抓取钳相连接,所述抓取钳的钳头与所述收纳袋上设置的辅助夹板相连接,所述收纳袋袋口处设有连接外缘,所述连接外缘内设有钢索,所述钢索环绕穿过所述连接外缘并与设置在所述内杆体内设置的联动杆相连接,所述联动杆和拉取柄相连接。
所述内杆体的端部上设有限位平台,所述限位平台上设有限位凹槽,所述限位凹槽内设有所述钢索,以实现限位,所述限位平台上可拆卸固定设有固定挡板。
所述抓取钳包括所述钳头、钳身和操作手柄,所述钳头通过所述钳身和所述操作手柄相连接,以实现通过所述操作手柄控制所述钳头的开合。
所述操作手柄上设有两个限位凸块,两所述限位凸块分别设置在所述操作手柄的上下两端,以实现在所述操作手柄相对与所述连接固定板进行滑动时对其进行限位。
所述辅助夹板设置在所述收纳袋内侧的面上设有摩擦层,所述辅助夹板设置在所述收纳袋外侧的面上设有固定栓以实现和所述钳头固定连接。
所述摩擦层由均匀设置的摩擦凸块组成。
所述固定栓的数量不小于两个。
所述钳头上设有固定孔,所述固定孔的数量和位置与所述固定栓相匹配,以实现固定。
所述固定栓上设有螺纹,通过螺母进行固定。
本发明的有益效果为:本技术方案针对现有技术中取物袋不易操作的问题作出改进,通过抓取钳和收纳袋进行配合使取物袋本身具有独立收集组织的能力,无需使用夹持钳即可独立操作,利用收纳袋上设置的辅助夹板对组织进行夹取固定,而后进行组织收集,不但简化了操作的方式同时还解决了组织收集后易脱出的问题。为节省治疗成品,对内杆体进行进一步优化,利用可拆卸结构使钢索可以拆卸,便于更换收纳袋进行重复利用。
附图说明
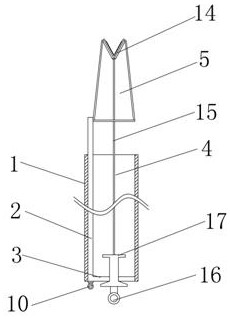
图1是本发明的结构示意图;
图2是本发明的局部放大示意图;
图3是连接外缘的结构示意图;
图4是限位平台的结构示意图;
图5是内杆体的结构示意图;
图6是收纳袋的结构示意图;
图7是辅助夹板的结构示意图;
图8是固定孔的结构示意图;
图中:1为外杆体,2为内杆体,3为连接固定板,4为抓取钳,5为收纳袋,6为辅助夹板,7为连接外缘,8为钢索,9为联动杆,10为拉取柄,11为限位平台,12为限位凹槽,13为固定挡板,14为钳头,15为钳身,16为操作手柄,17为限位凸块,18为摩擦层,19为固定栓,20为摩擦凸块,21为固定孔。
具体实施方式
下面通过具体的实施例对本发明的技术方案作进一步的说明。
实施例一
套入式腔镜取物袋,包括外杆体1、内杆体2、连接固定板3、抓取钳4和收纳袋5,外杆体1内侧设有内杆体2,内杆体2通过连接固定板3和抓取钳4相连接,抓取钳4的钳头14与收纳袋5上设置的辅助夹板6相连接,收纳袋5袋口处设有连接外缘7,连接外缘7内设有钢索8,钢索8环绕穿过连接外缘7并与设置在内杆体2内设置的联动杆9相连接,联动杆9和拉取柄10相连接。
内杆体2的端部上设有限位平台11,限位平台11上设有限位凹槽12,限位凹槽12内设有钢索8,以实现限位,限位平台11上可拆卸固定设有固定挡板13。
抓取钳4包括钳头14、钳身15和操作手柄16,钳头14通过钳身15和操作手柄16相连接,以实现通过操作手柄16控制钳头14的开合。
操作手柄16上设有两个限位凸块17,两限位凸块17分别设置在操作手柄16的上下两端,以实现在操作手柄16相对与连接固定板3进行滑动时对其进行限位。
辅助夹板6设置在收纳袋5内侧的面上设有摩擦层18,辅助夹板6设置在收纳袋5外侧的面上设有固定栓19以实现和钳头14固定连接。
摩擦层18由均匀设置的摩擦凸块20组成。
固定栓19的数量不小于两个。
钳头14上设有固定孔21,固定孔21的数量和位置与固定栓19相匹配,以实现固定。
固定栓19上设有螺纹,通过螺母进行固定。
本方案的工作原理如下,如图1-3所示,将内杆体2推出外杆体1外,并将钳头14和收纳袋5上的辅助夹板6进行固定,在使用时滑动抓取钳4将收纳袋5内壁朝外翻折,利用操作手柄16控制钳头14联动辅助夹板6将组织紧固抓取后,抓取钳4向后拉,控制收纳袋5往前推进,使收纳袋5反向将采集组织套入收纳袋5内,装入整个标本后,通过拉取柄10控制联动杆9使钢索8回收,将收纳袋5封闭后取出采集的组织完成使用。为保证抓取钳4在使用时便于使用,钳身15应为硬质结构,如硬杆外壳内置联动钢索等结构。
优选的,为了更加便于抓取钳4进行上下滑动,在操作手柄16上设置有上下两个限位凸块17,避免在滑动时脱出影响使用。在实际使用中内杆体2和连接固定板3可为一体制成,便于使用。
优选的,如图4-5所示,内杆体2的端部上设有限位平台11,利用限位平台11上设置的限位凹槽12对钢索8进行限位,使其可以更好的控制钢索8的行动轨迹,便于收纳袋5袋口的开合控制,同时钢索8和联动杆9采用可拆卸的连接方式,如利用螺栓固定、环绕固定或夹取固定等方式,使钢索8可以拆卸,用于更换收纳袋5进行重复利用。
优选的,如图6-8所示,为了增加抓取效果辅助夹板6上设置有摩擦层18,摩擦层18由均匀设置的摩擦凸块20组成,可以更好的抓取组织,不易打滑。
优选的,为了便于和钳头14固定连接,采用固定栓19穿过固定孔21的方式提供应力进行连接,为了保证联动效果固定栓19不少于两个,优选为三个。进一步,为了保证钳头14不会脱落,在固定栓19上设置有螺纹,并通过螺母进行紧固固定。
为了易于说明,实施例中使用了诸如“上”、“下”、“左”、“右”等空间相对术语,用于说明图中示出的一个元件或特征相对于另一个元件或特征的关系。应该理解的是,除了图中示出的方位之外,空间术语意在于包括装置在使用或操作中的不同方位。例如,如果图中的装置被倒置,被叙述为位于其他元件或特征“下”的元件将定位在其他元件或特征“上”。因此,示例性术语“下”可以包含上和下方位两者。装置可以以其他方式定位(旋转90度或位于其他方位),这里所用的空间相对说明可相应地解释。
而且,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个与另一个具有相同名称的部件区分开来,而不一定要求或者暗示这些部件之间存在任何这种实际的关系或者顺序。
以上对本发明的一个实施例进行了详细说明,但所述内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
- 套入式腔镜取物袋
- 一种腹腔镜下自动撑开取物袋及取物袋组件