用于两镜反射系统的多自由度自适应调整装置及调整方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明属于高成像质量光学系统精密装调技术领域,涉及一种用于两镜反射系统的多自由度自适应调整装置及调整方法。
背景技术
多光谱共光路光学系统凭借其探测距离远、分辨能力强的特点,在光电系统中得到了快速的发展。作为共光路光学系统的核心组件,两镜反射系统的装调控制精度尤为重要。两镜反射系统由非球面主反射镜与次反射镜组成,最典型的光学形式为卡塞格林光学系统,如图1所示。次镜相对于主镜具有六个自由度,其空间位姿与设计模型的符合程度直接决定着系统的光学成像性能。除绕光轴(z轴)旋转自由度外,次镜的其余五个自由度均会对系统波像差产生影响,换句话说,次镜在装调环节存在五个维度的失调量。针对该系统的常规装调方法,是利用干涉仪进行基于波像差测量的装调:操作者根据干涉仪测量得到像差信息,初步判断失调方向与失调量,通过螺钉过孔平移调整次镜组件的装配位置、或通过增加垫片改变次镜的空间角度,从而改变系统的波前状态,再次测量后再次调校,直至系统波像差趋于最佳值。例如2011年于《激光与红外工程》发表的《小F数卡赛格林系统装调技术》论文等,均介绍了此类关于两镜反射系统的装调方法。
但通过对多个项目的实际装调,以及对装调后系统的成像质量与设计值进行对比,申请人发现利用常规方法装调的产品,系统波像差尽管达到了装调可控范围内的“最佳值”,但距离系统设计值仍存在20%以上的差距,也就是说,系统并未真正装调至最佳状态。产生该现象的主要原因为:
1)人工判别操作的方法对失调方向的判断较为准确,但对失调量的判断很难精确,需要通过多次试错完成,而有限次的试错只能使系统状态趋于最佳,却无法达到最佳;
2)人工操作可现实的调整量的灵敏度为:平移最小调整量大于0.05mm、倾斜最小调整量大于1′,对于长焦高压缩比两镜系统来说,该灵敏度比光学设计对次镜的位置误差允差大1个量级以上,也就无法保证系统实现近衍射极限的装调;
3)次镜组件调整完成后采用螺钉连接方式紧固,紧固的过程又带来了次镜的微量位姿变化,加之紧固接触应力的影响,使系统的波像差相对调整完毕后状态又一次向着最佳值的反方向偏离。
为了解决人工操作存在的试错问题,许多同行提出了计算机辅助装调的思想并进行了大量研究,如2010年公开的硕士论文《两镜系统计算机辅助装调研究》、《基于矢量波像差理论的两镜系统装调技术研究》等。计算机辅助装调通过构建失调量与像差之间的灵敏度矩阵,通过实测像差求解失调量,指导操作者装调,可在一定程度上解决上述试错的问题,但受限于灵敏度矩阵的线性近似,该方法仅适用于小视场小像差装调过程,且实际调整过程仍是人工操作,同样存在上述调整精度与紧固的问题。
针对两镜卡式系统,还有一种常用装调方法是基于光学定心的思想,如2017年公开的专利《一种卡式光学系统装调方法》、2019年公开的专利《卡塞格林光学系统主次反射镜的装调方法》、2020年公开的专利《一种基于卡式光学系统的装调方法》等,定心装调法其精度受限于定心仪器,进口仪器对单个球面的球心偏测量精度约为0.01mm、对间隔的测量精度约为0.02mm,加之对非球面采用球面定心法引入的误差,误差累积后装调结果对红外光学系统尚可接受,但远无法满足含可见光的长焦共光路两镜系统对主次镜相对位姿微米级与秒级的要求,相对于干涉仪波像差装调方法,在精度与直观性上均存在差距。
发明内容
(一)发明目的
本发明的目的是解决两镜反射系统实现近衍射极限成像、高效装调所存在问题,为实现两镜反射式系统的优化装调提供一种自动化、高精度调整装置及合理可行的方法。
(二)技术方案
为了解决上述技术问题,本发明提供一种用于两镜反射系统的多自由度自适应调整装置,其包括干涉仪5、多自由度自适应调整机构7、标准平晶8;多自由度自适应调整机构7包括多自由度调整模块和闭环控制器12,两镜反射系统6安装在多自由度调整模块上,干涉仪5同轴布置在两镜反射系统6前方,标准平晶8同轴布置在两镜反射系统6后方,两镜反射系统6包括主镜组件1、次镜2、次镜架3、次镜框4,次镜2安装在次镜框4上,次镜框4安装在次镜架3上,次镜2与次镜框4粘接构成次镜组件,次镜组件安装在多自由度调整模块上;闭环控制器12读取干涉仪5对两镜反射系统6波像差的实时测试数据,根据所设波像差目标值进行计算自动寻优,驱动多自由度调整模块带动次镜组件进行位姿调整,直至像差测试量达到目标值。
其中,所述多自由度调整模块包括转接机构9、五维微动机构10、三维宏动机构11,三维宏动机构11布置在工作台上,五维微动机构10安装在三维宏动机构11上,转接机构9安装在五维微动机构10上,闭环控制器12通过连接电缆分别与五维微动机构10、三维宏动机构11和干涉仪5连接,用于读取干涉仪5对两镜反射系统6波像差的实时测试数据,并控制五维微动机构10和三维宏动机构11实现次镜组件的位姿调整。
其中,所述次镜2与次镜框4粘接构成次镜组件,次镜组件与多自由度调整模块中的转接机构9连接,闭环控制器12控制三维宏动机构11和五维微动机构10动作,带动次镜组件进行位姿调整。
其中,所述三维宏动机构11沿水平面上x轴、y轴和竖直方向上z轴的大范围平动,平动精度为0.5mm,平动范围与待调整两镜反射系统的光机参数相适应。
其中,所述五维微动机构10在电机带动下实现沿x轴、y轴、z轴的精确平动,精度优于0.5um。
其中,所述五维微动机构10在电机带动下实现绕x轴、y轴的精确转动,精度优于2"。
其中,所述五维微动机构10外形尺寸小于两镜反射系统次镜组件的外形尺寸。
其中,所述三维宏动机构与两镜系统中次镜架3的外形结构相同。
本发明还提供一种用于两镜反射系统的多自由度自适应调整方法,其包括以下步骤:
步骤1:搭建两镜反射系统自适应装调光路,连接多自由度自适应调整装置中闭环控制器与干涉仪、五维微动机构、三维宏动机构的电缆;
步骤2:将次镜组件通过转接机构安装于自适应调整装置上,通过调整三维宏动机构,使次镜组件伸入两镜系统的次镜架中,基本处于理论位置;
步骤3:自适应调整装置上电,人工对干涉图样进行初调,人工输入调整方向与调整量,通过控制器驱动五维微动机构运动,使两镜系统的干涉条纹出现于干涉测量显示器上;
步骤4:自适应调整装置选择“自动模式”,设定波像差目标值,装置根据实时波像差信息自动寻优并带动次镜组件进行自适应装调,每调整一次后进行控制干涉仪进行波像差测试,直至波像差测试值达到目标值;
步骤5:对次镜组件与次镜架进行低应力固联,固联完成后将次镜组件从转接机构上拆离,调整完毕。
其中,所述步骤3中,系统波像差RMS不大于0.5λ;所述步骤4中,波像差目标值设定为0.03λ。
(三)有益效果
上述技术方案所提供的用于两镜反射系统的多自由度自适应调整装置及调整方法,有益效果体现在以下几个方面:
(1)本发明利用装置代替人工完成两镜反射系统的装调,以系统波像差最佳值为目标驱动次镜自动寻优,相较于人工试错,具有效率高、准确性好的优势;
(2)装置中五维微动机构的调节精度远高于人工操作的精度,可实现系统的高像质装调;
(3)本发明具有一定的通用性,可根据待装调两镜系统进行结构的适应性优化,不引入干涉测量光路中的多余遮拦;
(4)本发明中采用的调整方法,为实现次镜组件在两镜系统中的低应力固定连接打下基础。
附图说明
图1是本发明的装调对象——某两镜卡塞格林反射系统光机示意图。
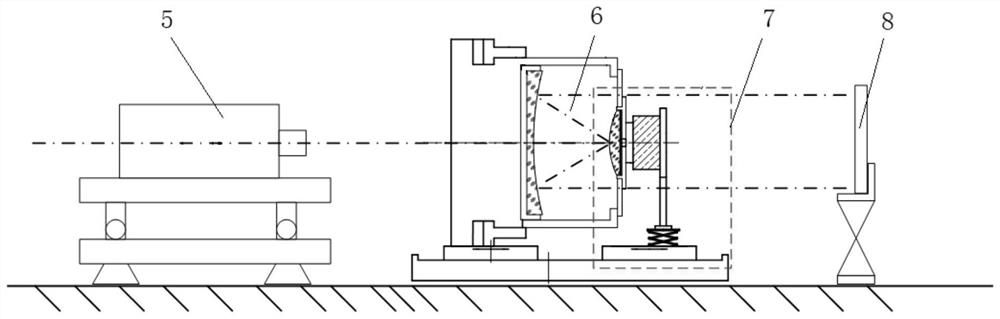
图2是两镜反射系统自适应装调示意图。
图3是图2中所示多自由度自适应调整机构示意图。
图中:1、主镜组件;2、次镜;3、次镜架;4、次镜框;5、干涉仪;6、两镜反射系统;7、多自由度自适应调整机构;8、标准平晶;9、转接机构;10、五维微动机构;11、三维宏动机构;12、闭环控制器。
具体实施方式
为使本发明的目的、内容、和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
针对现有的两镜反射系统装调技术中存在的问题,为实现两镜反射系统近衍射极限成像质量的装调,本实施例提供一种自动化、高精度调整装置及合理可行的方案。
如图1所示为某两镜卡塞格林反射系统,包括主镜组件1、次镜2、次镜架3、次镜框4。
图2所示为两镜反射系统的多自由度自适应装调示意图,图3示出了多自由度自适应调整机构示意图,其中示出了干涉仪5、两镜反射系统6、多自由度自适应调整机构7、标准平晶8;多自由度自适应调整机构7包括多自由度调整模块和闭环控制器12,两镜反射系统6安装在多自由度调整模块上,干涉仪5同轴布置在两镜反射系统6前方,标准平晶8同轴布置在两镜反射系统6后方,两镜反射系统6包括主镜组件1、次镜2、次镜架3、次镜框4,次镜2安装在次镜框4上,次镜框4安装在次镜架3上,次镜2与次镜框4粘接构成次镜组件,次镜组件安装在多自由度调整模块上;闭环控制器12读取干涉仪5对两镜反射系统6波像差的实时测试数据,根据所设波像差目标值进行计算自动寻优,驱动多自由度调整模块带动次镜组件进行位姿调整,直至像差测试量达到目标值。
多自由度调整模块包括转接机构9、五维微动机构10、三维宏动机构11,三维宏动机构11布置在工作台上,五维微动机构10安装在三维宏动机构11上,转接机构9安装在五维微动机构10上,闭环控制器12通过连接电缆分别与五维微动机构10、三维宏动机构11和干涉仪5连接,用于读取干涉仪5对两镜反射系统6波像差的实时测试数据,并控制五维微动机构10和三维宏动机构11实现次镜组件的位姿调整。
其中,次镜2与次镜框4粘接构成次镜组件,次镜组件与多自由度调整模块中的转接机构9连接,闭环控制器12控制三维宏动机构11和五维微动机构10动作,带动次镜组件进行位姿调整。
三维宏动机构11可实现沿水平面上x轴、y轴和竖直方向上z轴的大范围平动,平动精度为0.5mm,平动范围与待调整两镜反射系统的光机参数相适应。
五维微动机构10在电机带动下实现沿x轴、y轴、z轴的精确平动,精度优于0.5um;并实现绕x轴、y轴的精确转动,精度优于2"。
五维微动机构10外形尺寸小于两镜反射系统次镜组件的外形尺寸,所述三维宏动机构与两镜系统中次镜架3的外形结构相同,从而确保多自由度自适应调整装置不引入干涉测量光路中的多余遮拦。
基于上述用于两镜反射系统的多自由度自适应调整装置,本实施例还提供一种用于两镜反射系统的多自由度自适应调整方法,包括以下步骤:
步骤1:搭建两镜反射系统自适应装调光路,连接多自由度自适应调整装置中闭环控制器与干涉仪、五维微动机构、三维宏动机构的电缆;
步骤2:将次镜组件通过转接机构安装于自适应调整装置上,通过调整三维宏动机构,使次镜组件伸入两镜系统的次镜架中,基本处于理论位置;
步骤3:自适应调整装置上电,选择“人工模式”,此时人工对干涉图样进行初调,人工输入调整方向与调整量,通过控制器驱动五维微动机构运动,使两镜系统的干涉条纹出现于干涉测量显示器上,建议此时系统波像差RMS不大于0.5λ;
步骤4:自适应调整装置选择“自动模式”,设定波像差目标值,例如:0.03λ,装置根据实时波像差信息自动寻优并带动次镜组件进行自适应装调,每调整一次后进行控制干涉仪进行波像差测试,直至波像差测试值达到目标值;
步骤5:对次镜组件与次镜架进行低应力固联,固联完成后将次镜组件从转接机构上拆离,调整完毕。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 用于两镜反射系统的多自由度自适应调整装置及调整方法
- 一种大口径反射镜的多自由度调整系统