一种潜望式周视瞄准镜光学消像旋机构
文献发布时间:2023-06-19 11:11:32
技术领域
本发明属于光学、精密机械技术领域,涉及一种潜望式周视瞄准镜光学消像旋机构。
背景技术
目前,周视瞄准镜大多采用潜望式光学系统,进行360°周视观瞄过程中观察视场随方位回转轴扫描时存在像旋转问题。解决此问题通常采用光学消像旋方法,即基于反射棱镜微量转动定理在系统光路中安装消旋棱镜,依靠消旋棱镜的旋转达到消像旋的作用。因此,需要设计一种消像旋机构实现消旋棱镜的旋转。
目前,消像旋主要采用以下几种方式:光学消像旋、物理消像旋、电子消像旋、数字消像旋等。从目前的应用现状来看潜望式周视瞄准镜大部分采用光学消像旋。
传统的潜望式周视瞄准镜消像旋机构的原理是通过一系列的齿轮传动组的传递,将方位回转平台的转动角度传递给消像旋的别汉棱镜组,并带动别汉棱镜组以二倍的关系运动,完成消像旋的功能。一方面由于齿轮组的传递误差以及加工误差会带来消像旋误差;另一方面齿轮传动的间隙和传动效率,影响其传递精度,调节减小齿轮组的间隙,易引起齿轮转动不平滑,增大了摩擦力矩,对转台的稳定反过来造成干扰,从而影响到整个系统的稳像精度;再者,齿轮传动组的结构相对复杂,装调困难,制造成本高。
发明内容
(一)发明目的
本发明的目的是:提供了一种结构简单、制造成本低、装调方便、成像精度高的消像旋机构,解决潜望式周视瞄准镜360°周视观瞄过程中像旋转问题。
(二)技术方案
为了解决上述技术问题,本发明提供一种潜望式周视瞄准镜光学消像旋机构,其包括:棱镜回转轴系、别汉棱镜组件、直流力矩电机6与光电编码器7;棱镜回转轴系包括基座2和同轴安装在基座2内部的转轴3,别汉棱镜组件安装在转轴3上;直流力矩电机6与光电编码器7分别置于轴系两端,直流力矩电机6位于轴系前端,光电编码器7位于轴系后端,二者静子分别固定安装在基座2上,转子与转轴3同轴安装,直流力矩电机6用于驱动别汉棱镜组件旋转轴系转动,光电编码器7用于实时测角进行位置反馈,实现消像旋功能。
其中,所述基座2和转轴3之间设置两圈散装钢球4,基座2、转轴3和光电编码器7之间设置沿轴向方向的调整压圈5,通过调整压圈5调整基座2和转轴3之间的轴向间隙和预紧力。
其中,所述基座2的内壁面和转轴3的外周面之间由前至后设置有四组台阶,分别记为第一组台阶、第二组台阶、第三组台阶和第四组台阶;第一组台阶形成第一环形槽,第一环形槽内安装直流力矩电机6;第二组台阶处的基座2的内壁面和转轴3的外周面相接触,接触面两端布置两圈散装钢球4;第三组台阶形成第三环形槽,第三环形槽内布置调整压圈5,第四组台阶形成第四环形槽,第四环形槽内安装光电编码器7,第四环形槽和第三环形槽相通,调整压圈5的前端面抵触在基座2和转轴3上,后端面抵触在光电编码器7上。
其中,所述第三环形槽处,基座2上槽的轴向长度大于转轴3上槽的轴向长度,使得第三环形槽的前端面为折转面,后端面为平面,调整压圈5前端面与折转面贴合,后端面处外圈留有环形间隙,内圈与光电编码器7接触,满足轴向间隙、预紧力调整时所需的空间。
其中,所述别汉棱镜组件包括别汉棱镜座14和安装在其上的别汉棱镜1,别汉棱镜座14通过螺钉固定安装在转轴3上,别汉棱镜座14和转轴3之间均匀间隔分布三个止螺一8,通过三个止螺一8对别汉棱镜座14进行位置定位,通过调节止螺一8使别汉棱镜1的光轴与转轴3的机械回转中心重合。
其中,所述别汉棱镜座14上设置有连接板13,别汉棱镜座14通过连接板13与转轴3固连,实现别汉棱镜光轴多维度调整功能。
其中,所述别汉棱镜1通过压板11和压紧螺钉12固定安装在别汉棱镜座14内。
其中,所述别汉棱镜座14侧面上还安装有调整螺钉二16,通过调整调整螺钉二16实现别汉棱镜1无任何松动。
其中,所述别汉棱镜座14通过3个调整螺钉一9与连接板9相连,连接板13上开设用于安装调整螺钉一9的螺纹安装孔,连接板13上还开设有三个螺纹孔,三个螺纹孔与螺纹安装孔在同心圆上均匀间隔交错分布,三个螺纹孔内分别安装止螺二10。
其中,调整所述别汉棱镜1的光轴时,通过调节调整螺钉一9、止螺二10使别汉棱镜1的入射面垂直于旋转轴,通过调节止螺一8使别汉棱镜1的光轴与旋转轴同轴。
(三)有益效果
上述技术方案所提供的潜望式周视瞄准镜光学消像旋机构,具有以下有益效果:
1、本发明的潜望式周视瞄准镜消像旋机构,相比现有技术,采用直流力矩电机驱动,光电编码器实时测角进行位置反馈,可实现较高的旋转定位精度,从而减小消像旋误差。
2、本发明的潜望式周视瞄准镜消像旋机构轴系采用自制导轨,装配中可以灵活调整预紧力,使轴系回转平滑,端跳小,同时外形尺寸小、重量轻。
3、本发明的潜望式周视瞄准镜消像旋机构中的别汉棱镜具有多维度调整功能,通过调整螺钉实现棱镜光轴调整,实现棱镜的光轴与其机械回转中心重合,装调过程简单、方便,显著提高装配效率。
4、本发明的潜望式周视瞄准镜消像旋机构结构简单、装调方便、制造成本低。
附图说明
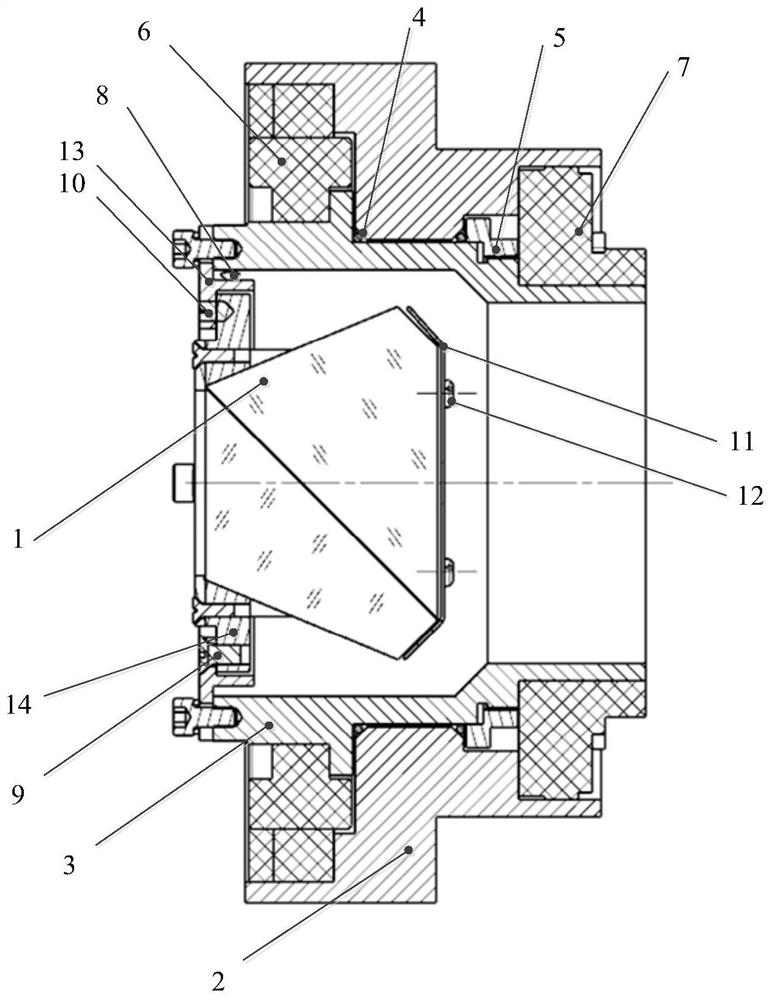
图1为本发明潜望式周视瞄准镜光学消像旋机构的结构组成示意图。
图2为别汉棱镜组件的结构示意图。
图3为连接板的结构示意图。
图中:1、别汉棱镜,2、基座,3、转轴,4、钢球,5、调整压圈,6、直流力矩电机,7、光电编码器,8、止螺一,9、调整螺钉一,10、止螺二,11、压板,12、压紧螺钉,13、连接板,14、别汉棱镜座,15、调整螺钉二。
具体实施方式
为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
如图1所示,本发明潜望式周视瞄准镜光学消像旋机构包括:棱镜回转轴系、别汉棱镜组件、直流力矩电机6与光电编码器7;棱镜回转轴系包括基座2和同轴安装在基座2内部的转轴3,别汉棱镜组件安装在转轴3上;直流力矩电机6与光电编码器7分别置于轴系两端,直流力矩电机6位于轴系前端,光电编码器7位于轴系后端,二者静子分别固定安装在基座2上,转子与转轴3同轴安装,直流力矩电机6用于驱动别汉棱镜组件旋转轴系转动,光电编码器7用于实时测角进行位置反馈,实现消像旋功能。
其中,基座2和转轴3之间设置两圈散装钢球4,基座2、转轴3和光电编码器7之间设置沿轴向方向的调整压圈5,通过调整压圈5调整基座2和转轴3之间的轴向间隙、预紧力。
具体地,基座2的内壁面和转轴3的外周面之间由前至后设置有四组台阶,分别记为第一组台阶、第二组台阶、第三组台阶和第四组台阶;第一组台阶形成第一环形槽,第一环形槽内安装直流力矩电机6;第二组台阶处的基座2的内壁面和转轴3的外周面相接触,接触面两端布置两圈散装钢球4;第三组台阶形成第三环形槽,第三环形槽内布置调整压圈5,第四组台阶形成第四环形槽,第四环形槽内安装光电编码器7,第四环形槽和第三环形槽相通,调整压圈5的前端面抵触在基座2和转轴3上,后端面抵触在光电编码器7上。进一步地,第三环形槽处,基座2上槽的轴向长度大于转轴3上槽的轴向长度,使得第三环形槽的前端面为折转面,后端面为平面,调整压圈5前端面与折转面贴合,后端面处外圈留有环形间隙,内圈与光电编码器7接触,满足轴向间隙、预紧力调整时所需的空间。
上述结构中,基座2、转轴3、钢球4、调整压圈5组成高精度导轨,转轴3为导轨内环转子,基座2为外环定子,构成棱镜回转轴系。
如图2和图3所示,别汉棱镜组件包括别汉棱镜座14和安装在其上的别汉棱镜1,别汉棱镜座14通过螺钉固定安装在转轴3上,别汉棱镜座14和转轴3之间均匀间隔分布三个止螺一8,通过三个止螺一8对别汉棱镜座14进行位置定位,通过调节止螺一8使别汉棱镜1的光轴与转轴3的机械回转中心重合。
别汉棱镜组件还包括:调整螺钉一9、止螺二10、压板11、压紧螺钉12、连接板13、别汉棱镜座14、调整螺钉二16。别汉棱镜座14上设置有连接板13,别汉棱镜座14通过连接板13与转轴3固连,实现别汉棱镜光轴多维度调整功能;别汉棱镜1通过压板11和压紧螺钉12固定安装在别汉棱镜座14内;别汉棱镜座14侧面上还安装有调整螺钉二16,通过调整调整螺钉二16实现别汉棱镜1无任何松动,别汉棱镜座14通过3个调整螺钉一9与连接板9相连,连接板13上开设用于安装调整螺钉一9的螺纹安装孔,连接板13上还开设有三个螺纹孔,三个螺纹孔与螺纹安装孔在同心圆上均匀间隔交错分布,三个螺纹孔内分别安装止螺二10。
止螺一8、调整螺钉一9、止螺二10等结构保证别汉棱镜光轴的调整功能,调整别汉棱镜光轴时,通过调节调整螺钉一9、止螺二10使别汉棱镜1的入射面垂直于旋转轴,通过调节止螺一8使别汉棱镜1的光轴与旋转轴同轴,最终实现别汉棱镜1的光轴与机械回转中心及光学系统的视轴三轴重合。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 一种潜望式周视瞄准镜光学消像旋机构
- 一种航天光学遥感仪器反射式消像旋组件光学校正方法