用于车辆的传感器数据融合的方法和装置
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种用于车辆的传感器数据融合的方法和一种用于车辆的传感器数据融合的装置。本发明还涉及一种计算机程序以及一种计算机可读的存储介质。
背景技术
为了识别在车辆的周围环境中的对象、特别是为了识别其他交通参与者和所述其他交通参与者的相关的特性,通常使用异类的传感器装置。在车辆周边环境中的识别的对象可用于可靠地实现辅助功能、特别是用于进行纵向调节的功能、如主动巡航控制或交叉路口辅助,以及用于进行横向调节的功能、如侧向防撞、转向辅助和车道引导辅助。
由于所使用的传感器装置的测量原理不同,通过传感器装置检测到的关于对象的信息可能是不同的。由于在车辆中的计算能力有限,由传感器装置提供的信息通常在高水平层面上融合。这意味着,传感器装置分别根据所检测的信息单独地识别对象并且在抽象的与传感器独立的对象表示
典型地,为此构造“智能的”传感器装置,所述传感器装置的识别能力除了对周围环境的在物理上的测量之外还以下游的内部的信息处理为依据。所述信息处理的主要组成部分是递归评估过程,所述递归评估过程也可以在时间上观察对象特性,所述对象特性不能直接由唯一一次测量确定。除了评估其他交通参与者的对象特性之外,递归评估过程此外还能够提供所述对象特性的不确定性的程度。
由于评估过程的递归的表达,由传感器装置提供的传感器对象数据可能在统计学上并非独立于在较早时刻的传感器对象数据。此外,因为不同的传感器装置经常以类似的评估过程为依据并且部分地获得——例如与自身车辆的运动有关的——甚至相同的输入数据,所以不同的传感器装置的传感器对象数据也可能在统计学上并非彼此独立。为了融合这样相关联的传感器对象数据,可以使用所谓的信息矩阵融合算法(IMF),在所述信息矩阵融合算法中,递归评估过程被扩展了传感器对象数据的去关联。就这点而言,参见Aeberhard,M.,Rauch,A.,Rabiega,M.,Kaempchen,N.,和Bertram,T.(2012年6月)在“Track-to-track fusion with asynchronous sensors and out-of-sequence tracksusing information matrix fusion for advanced driver assistance systems”,智能车技术论坛(IV),2012IEEE(第1-6页)中的实施方案。
不过,为了对各传感器对象数据进行去关联,IMF算法在理论上的“最坏情况”中要求所有传感器对象数据的无限长的历史,所述无限长的历史特别是由于在车辆中使用的嵌入式系统上的有限的存储器资源而无法使用。IMF算法的另一缺点是以传感器对象数据为基础的假设、特别是在所报告的不确定性方面的假设,在实践中经常违背所述假设。于是,IMF算法提供具有严重错误的对象特性的部分地不一致的评估,其中,错误没有相应地反映在所确定的不确定性中,反而输出过小的不确定性。这可能导致在融合的下游的辅助功能中的严重错误行为。
发明内容
本发明所基于的目的是,提供一种用于车辆的传感器数据融合的方法以及一种相应的装置、一种计算机程序以及一种计算机可读的存储介质,其有助于传感器对象与融合对象的可靠的配设并且能够实现可靠的传感器数据融合。
所述目的通过各独立权利要求来实现。有利的设计方案在各从属权利要求中表明。
根据第一方面,本发明涉及一种用于车辆的传感器数据融合的方法。所述车辆配设有传感器装置。
在所述方法中,提供当前的传感器对象数据。所述当前的传感器对象数据代表通过传感器装置在车辆的周围环境中在时刻t确定的传感器对象s
此外,提供融合对象数据集。所述融合对象数据集包括融合对象数据,所述融合对象数据分别代表在车辆的周围环境中确定的融合对象
此外,提供传感器对象数据集
在所述方法中,根据所述传感器对象数据集H确定减少的传感器对象数据集
此外,根据所述减少的传感器对象数据集H′将传感器对象s
所提出的方法能以有利的方式实现传感器对象与融合对象的可靠且高效的配设。特别是,所述方法有助于相互关联的传感器对象数据的可靠融合。
所述传感器装置构造为用于检测车辆的周围环境并且确定在车辆的周围环境中的传感器对象。特别是,所述传感器装置可以构造为用于检测对象的侧向的延伸范围和/或定向。所述传感器装置例如是摄像机传感器、LiDAR(Light Detection And Ranging,光探测和测距)传感器、LaDAR(Laser Detection And Ranging,激光探测和测距)传感器、RaDAR(Radio Detection And Ranging,无线电探测和测距)传感器、超声传感器、点激光传感器或红外传感器。
传感器对象数据集H包括同一传感器装置的历史传感器对象数据。在为车辆配设m>1个不同的传感器装置的情况下,为每个传感器装置提供一个传感器对象数据集H
所述减少的传感器对象数据集
通常在每个时刻t还将每个传感器装置的最多一个传感器对象
根据减少的传感器对象数据集H′来将传感器对象s
在根据第一方面的一种有利的设计方案中适用的是:1≤n≤5、优选n=2。
如此,可以有利地处理一次性的多义性。同时能够在资源有限的硬件上实现高效的使用。
在根据第一方面的另一种有利的设计方案中,借助IMF(Information MatrixFusion,信息矩阵融合)算法来将传感器对象s
在根据第一方面的另一种有利的设计方案中,将所述减少的传感器对象数据集H′分别与融合对象
随后,根据融合对象数据集将传感器对象s
因此,传感器对象s
在根据第一方面的另一种有利的设计方案中,在配设给相应的融合对象
在根据第一方面的另一种有利的设计方案中,为传感器对象s
此外,为融合对象
在所述方法中,根据所述特征数据
此外,根据特征数据
然后,根据所述特征融合状态
如此,能以有利的方式避免特别是对于IMF算法而言典型的错误情况,在所述典型的错误情况中,融合对象
特征融合状态
所述方程特别是代表更新的特性在融合之后处于原始的特性与已融合的传感器对象的特性之间。如果违背该方程,则将临时地中间存储的结果舍弃。
相应的特征数据可以除了相应的对象的侧向延伸范围、位置和定向之外还包括对象的其它特性、如所述对象的速度分量和加速度分量以及偏航比率。所述侧向延伸范围在此理解为对象平行于以及横向于测量方向或行驶方向或者说车辆的纵轴线的延伸尺寸。所述定向特别是表示对象的纵轴线与测量方向或行驶方向或者说车辆的纵轴线形成的角度。对象的位置可以示例性地表示对象的基准点,关于所述基准点给出所述对象的其它特性。
根据第二方面,本发明涉及一种用于车辆的传感器数据融合的装置。所述装置构造为用于实施根据第一方面的方法。所述装置也可称作传感器数据融合单元。
根据第三方面,本发明涉及一种用于车辆的传感器数据融合的计算机程序。所述计算机程序包括指令,所述指令当由计算机执行所述计算机程序时促使所述计算机实施根据第一方面的方法。
根据第四方面,本发明涉及一种计算机可读的存储介质,在所述存储介质上存储有根据第四方面的计算机程序。
附图说明
下面借助示意性的附图更详细地阐述本发明的各实施例。
图中:
图1示出具有用于传感器数据融合的装置的示例性车辆;
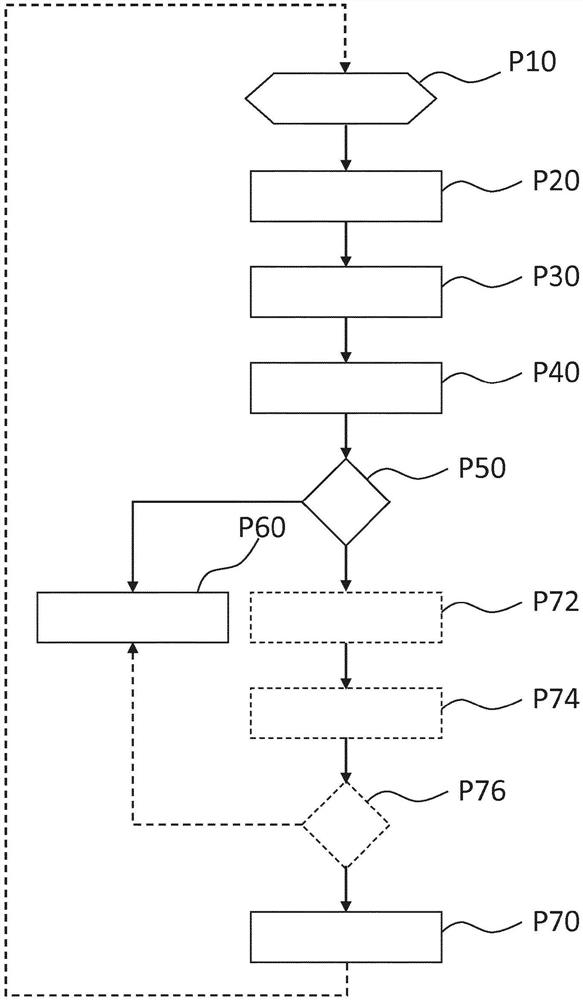
图2示出用于传感器数据融合的方法的示例性流程图;以及
图3示出相应的减少的传感器对象数据集与融合对象的示例性配设。
具体实施方式
结构相同或功能相同的元件在所有附图中设有相同的附图标记。
下面提出一种用于基于信息矩阵融合算法(IMF)进行高水平对象融合的方法,所述方法允许在嵌入式系统上的可靠的使用。借助图1的实施例示出根据本发明的车辆F,所述车辆具有用于传感器数据融合的装置V以及传感器装置S1,所述传感器装置配置为用于检测对象、特别是其他交通参与者和所述其他交通参与者的有关的特性并且用于确定相应的传感器对象s
车辆F还示例性地具有另一个传感器装置S2,所述另一个传感器装置也配置为用于检测车辆F的周围环境。传感器装置S1、S2与用于传感器数据融合的装置V在信号技术上耦合。由传感器装置S1、S2提供的传感器对象数据可以由装置V根据任意的用于高水平对象融合的方法来融合并且存储在融合对象数据集中。
所述用于高水平对象融合的方法可以是基于信息矩阵融合算法(IMF)的递归的评估过程。
从IMF算法的形式描述中得出,对于每个具有特性
就这点而言,装置V特别是配设有数据和程序存储器,在所述数据和程序存储器中存储有计算机程序,下面借助图2的流程图更详细地阐述所述计算机程序。
在第一步骤P10中提供当前的传感器对象数据,所述传感器对象数据代表通过传感器装置S1在车辆F的周围环境中在时刻t确定的传感器对象s
在步骤P20中继续该程序,在该步骤中提供融合对象数据集。融合对象数据集包括融合对象数据,所述融合对象数据分别代表在车辆F的周围环境中确定的融合对象
在随后的步骤P30中提供传感器对象数据集
所述传感器对象数据集H也可以称为关联历史。融合仅由传感器对象和融合对象的之前进行了的关联得出。因此,替代于记录所有的q个由传感器装置S1在时刻t识别到的传感器对象
接着步骤P30,该方法在步骤P40中继续,在该步骤中根据传感器对象数据集H确定减少的传感器对象数据集
对于传感器对象数据集H而言,n>1的必要性由不同的传感器对象在不同的时刻可能与相同的融合对象的关联才产生。但通常可能起因于传感器装置S1连续地追踪在车辆F的周围环境中的对象并且可能在密集的交通情况下导致多义的对象形成,其中,在周围环境中的实际的对象导致形成多个(在空间上或在时间上分离的)传感器对象。此外,在每个时刻,传感器装置S1的最多一个对象与同一个融合对象关联。
因此,在融合对象上注明少量的分别在最近一次与融合对象关联的传感器对象
在随后的步骤P50中,根据减少的传感器对象数据集H′将传感器对象s
为此,首先检查配设给相应的融合对象
在减少的传感器对象数据集H′没有在以前的时刻t-k,k=1...n包括相关联的传感器对象
如果从如上述那样有限的关联历史中无法找到在较早的时刻融合的传感器对象,例如在第一次融合传感器对象时,或者因为q的选择不能解决传感器装置的多义性,则在使用“互协方差”方法的情况下仅以近似地考虑可能的关联性的方式来使用融合。
随后结束程序或者必要时在预给定的中断之后在步骤P10中以更新的对象数据集继续程序。
在一种备选的实施方式变型方案中,步骤P70补充对革新的融合对象的可信度测试。
在用于融合多个传感器装置的传感器对象数据的IMF算法的在嵌入式系统上的实际应用中可能发生错误情况,所述错误情况导致确定了严重偏离由相应的传感器装置报告的特性的融合特性。
在这个实施方式变型方案中,为相应的传感器对象s
同样地,为相应的融合对象
在步骤P50之后的步骤P72中,根据特征数据
然后在步骤P74中,根据特征数据
最后在步骤P76中根据特征融合状态
在满足所述方程的情况下,在步骤P70中根据革新的特征状态
为了处理这种错误情况,融合对象和传感器对象的IMF融合特别是如往常那样实施,并且将结果暂时地中间存储以用于检查。如果所述结果违背上述直观的假设,则将所述临时的结果舍弃。取而代之地,在使用“互协方差”方法的情况下仅以近似地考虑可能的关联性的方式来进行融合。
- 用于车辆的多传感器数据融合方法、装置及车辆
- 用于车辆的传感器装置、用于制造用于车辆的传感器装置的方法、用于运行用于车辆的传感器装置的方法和用于车辆的传感器系统