一种时间同步的实时自适应收敛估计系统
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及时间同步技术领域,具体涉及一种时间同步的实时自适应收敛估计系统。
背景技术
根据内外公开发表论文,相关专利信息,以及NTP(Network Time Protocol)、IEEE standard 1588v2、WIA-PA、ISA100.11a和WirelessHART等相关协议或标准可知,面向大规模无线网络时间同步的现有技术主要集中与时间同步算法的时间信息交换、参数估计和实现方案等方面。而针对网络时间同步收敛状态在线估计,尚无具体研究。
发明内容
针对现有技术中的上述不足,本发明提供的一种时间同步的实时自适应收敛估计系统解决了无现有技术在线估计网络时间同步收敛状态的问题。
为了达到上述发明目的,本发明采用的技术方案为:一种时间同步的实时自适应收敛估计系统,包括:
同步误差估计单元,用于得到同步误差估计值;
同步误差特征估计模型,用于对收敛概率进行估计,对收敛概率估计值进行缓冲,并根据缓冲后的收敛概率估计值计算当前时间同步误差收敛概率估计;
实时收敛检测模型,用于筛选出符合收敛条件的同步误差估计值,对符合收敛条件的同步误差估计值进行缓冲,并根据缓冲后的符合收敛条件的同步误差估计值计算同步误差特征。
进一步地:所述同步误差估计值的计算公式为:
E
上式中,E
进一步地:所述实时收敛检测模型包括收敛概率估计器、第一缓冲器和收敛概率计算单元。
进一步地:所述收敛概率估计器的计算公式为:
上式中,out[k]为收敛概率估计值,E
进一步地:所述第一缓冲器为长度为L
进一步地:所述收敛概率计算单元为一个加权平均滤波器,所述加权平均滤波器的加权系数个数为L
进一步地:所述同步误差特征估计模型包括收敛判决逻辑单元、第二缓冲器和误差特征计算单元。
进一步地:所述收敛判决逻辑单元包括收敛判决子单元、逻辑子单元和使能子单元;
所述收敛判决子单元用于判断收敛判决是否为真,具体为当收敛概率大于预设的收敛阈值时,输出收敛判决为真,否则输出收敛判决为假;
所述逻辑子单元用于筛选出符合收敛条件的同步误差估计值E
进一步地:所述第二缓冲器为长度为L
进一步地:所述误差特征计算单元利用缓冲后的同步误差估计值E
本发明的有益效果为:本发明可用于有时间同步需求的分布式系统或无线网络中,将其集成到应用对象所采用的时间同步算法中,利用时间同步算法获得的时间偏移估计,进一步计算同步误差收敛概率。本发明获得的同步误差收敛概率,可作为其它应用判断系统时间同步精度、收敛状态的依据。
附图说明
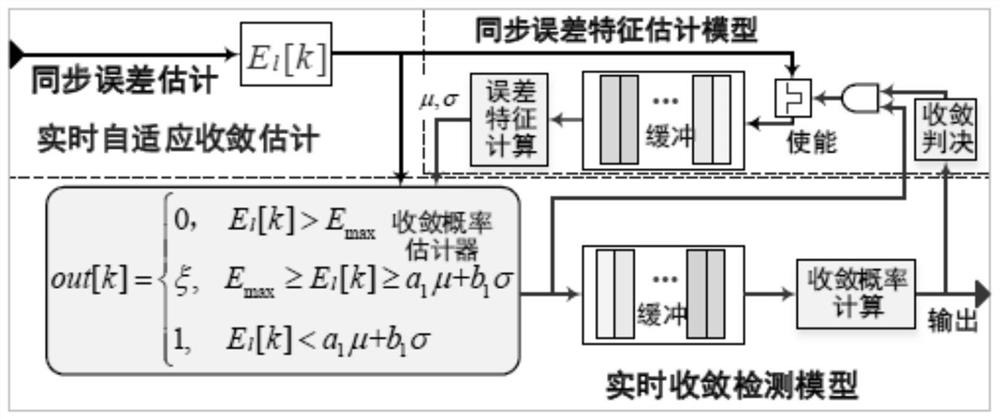
图1为本发明的结构框图。
具体实施方式
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
如图1所示,一种时间同步的实时自适应收敛估计系统,包括:
同步误差估计单元,用于得到同步误差估计值;
在本发明中以节点间的瞬时时钟偏移作为同步误差估计值E
同步误差估计值的计算公式为:
E
上式中,E
实时收敛检测模型,用于筛选出符合收敛条件的同步误差估计值,对符合收敛条件的同步误差估计值进行缓冲,并根据缓冲后的符合收敛条件的同步误差估计值计算同步误差特征。
所述实时收敛检测模型包括收敛概率估计器、第一缓冲器和收敛概率计算单元。
所述收敛概率估计器的计算公式为:
上式中,out[k]为收敛概率估计值,E
可依据时间同步算法的同步误差、硬件时钟的性能和网络环境等因数,将μ和σ初始化为足够大的数值。在算法运行期间,μ和σ由同步误差特征估计模型更新。
可依据时间同步算法的同步误差、硬件时钟的性能和网络环境等因数,将其初始化为足够大的数值,即E
a
收敛概率估计器每完成一个新的E
所述第一缓冲器为长度为L
所述收敛概率计算单元为一个加权平均滤波器,所述加权平均滤波器的加权系数个数为L
同步误差特征估计模型,用于对收敛概率进行估计,对收敛概率估计值进行缓冲,并根据缓冲后的收敛概率估计值计算当前时间同步误差收敛概率估计;
所述收敛判决逻辑单元包括收敛判决子单元、逻辑子单元和使能子单元;
所述收敛判决子单元用于判断收敛判决是否为真,具体为当收敛概率大于预设的收敛阈值时,输出收敛判决为真,否则输出收敛判决为假;收敛判决子单元的输出反映了一定时间范围内时间同步误差的收敛概率,收敛概率估计器的输出out反映了当前时间同步误差的收敛概率,两者联合使能筛选E
所述逻辑子单元用于筛选出符合收敛条件的同步误差估计值E
所述第二缓冲器为长度为L
所述误差特征计算单元利用缓冲后的同步误差估计值E
- 一种时间同步的实时自适应收敛估计系统
- 一种船舶动力定位系统噪声和状态实时估计自适应滤波方法