一种走时精度检测仪
文献发布时间:2023-06-19 13:49:36
技术领域
本发明涉及一种走时精度检测仪,尤其涉及一种多工位的走时精度检测仪。
背景技术
目前,在机械表走时精度的检测过程中国内外使用的方法一般是通过校表仪来实现,这种方法是使用微音器来拾取机心走时过程中擒纵机构碰撞所产生的声音,将其整理、计算、最后输出日差值。这种方式所测走时精度与手表的真实走时精度依然会有一定误差。
公开号为CN 109062026 A的中国专利公开了一种时间精度测量仪及其测量方法,通过图像处理技术获取表盘的时间,并与标准时间对比,以确定手表的走时精度。然而,该方案仍存在一些不足,单一机心检测,效率低,并且不能满足诊断手表多天,各个方位下存在的缺陷和问题。
发明内容
本发明的目的在于提供一种走时精度检测仪,以解决背景技术中提及的技术问题。
为实现上述目的,本发明的一种走时精度检测仪的具体技术方案如下:
一种走时精度检测仪,包括机架,机架上设置方位调节部件,方位调节部件端部设有固定台,固定台上相对的设置固定待测机芯的托盘组件和图像采集部件,托盘组件包括多个待测工位,图像采集部件与控制器连接,图像采集部件和托盘组件相对转动使图像采集部件与各待测工位的待测机芯对准,并对待测机芯的表盘拍照,以获取待测机芯的检测时间数据,控制器同步获取标准时间数据,通过比较检测时间数据和标准时间数据以获得手表的走时误差。
进一步的,所述方位调节部件包括旋转支撑轴和转轴,旋转支撑轴一端转动的固定在机架的外筒上,旋转支撑轴内设电机可驱动旋转支撑轴使固定台在竖直平面内转动,旋转支撑轴的另一端通过铰接轴与转轴铰接,转轴的另一端与固定台固定连接,与转轴铰接的旋转支撑轴端部也设有电机,驱动转轴绕旋转支撑轴做往复翻转动作。
进一步的,所述托盘组件的每个待测工位包括本体,本体内设有用于固定待测机芯的夹具,在夹具一侧的本体内设置自动上弦器,待测机芯的表把置于自动上弦器内。
进一步的,多个所述待测工位分布在同一圆环上,图像采集部件滑动的设置在环形轨道上,图像采集部件包括至少一个,至少一个图像采集部件与驱动结构相连,以驱动图像采集部件沿环形轨道滑动,使图像采集部件与各待测工位对准。
进一步的,多个待测工位分布在不同直径的同心圆环上,当图像采集部件的数量为一个时,图像采集部件通过平移结构固定在支撑板上;当图像采集部件的数量为多个时,图像采集部件固定在支撑板上;支撑板沿同行圆环的半径方向设置,支撑板滑动的固定在环形轨道上,支撑板与驱动结构连接,通过平移结构和驱动结构使图像采集部件与各待测工位对准。
进一步的,多个待测工位分布在直径不同的同心圆环上,同心圆环对应的设置多条环形轨道,每条环形轨道上均滑动的设置图像采集部件,图像采集部件与驱动结构连接,驱动结构驱动图像采集部件相对待测工位转动,以使图像采集部件与对应环形轨道上的待测工位对准。
进一步的,多个所述待测工位分为多组,每组待测工位呈线性分布,通过平移和/或转动图像采集部件与待测工位对准。
进一步的,各组所述待测工位呈辐射状分布,当图像采集部件的数量为一个时,图像采集部件通过平移结构滑动的固定在待测工位上方的固定杆上;当图像采集部件与每组待测工位的数量一致时,多个图像采集部件固定在固定杆上;固定杆与其中一组待测工位互相平行,固定杆滑动的设置在环形轨道上,固定杆与驱动结构连接,驱动结构驱动固定杆在环形轨道上滑动,使固定杆与不同组的待测工位对准。
进一步的,多组所述待测工位位于等边多边形的边上,当图像采集部件的数量为一个时,图像采集部件通过平移结构固定在待测工位上方的支撑架上;当图像采集部件的数量与待测工位的数量一致时,图像采集部件固定在支撑架上;支撑架与旋转结构连接。
进一步的,所述旋转结构包括电机和L型安装板,L型安装板的一端与支撑架固定连接,安装板的另一端转动的固定在固定台上。
进一步的,所述托盘组件固定在支撑架上,支撑架的中心处与安装板的一端固定连接,安装板的另一端固定在电机的输出轴,电机固定在固定台上,图像采集部件固定在固定台上,通过转动安装板使图像采集部件与待测机芯对准。
进一步的,所述平移结构为丝杠丝母传动结构、齿轮齿条传动结构、蜗轮蜗杆传动结构、皮带传动结构或者伸缩杆。
进一步的,所述驱动结构包括电机,电机的驱动轴固定齿轮,齿轮与环形齿条啮合,图像采集部件固定在环形齿条上,环形齿条滑动的固定在环形轨道上。
进一步的,所述图像采集部件的数量与所有待测工位的数量一致,图像采集部件与待测工位一一对应。
进一步的,所述标准时间数据通过控制器获取原子钟的标准时间得到,通过标准时间获得相应时间下标准时数值、标准分数值、标准秒数值。
本发明的一种走时精度检测仪具有以下优点:
本发明所述的走时精度检测仪设置多个待测工位,可同时对大量的机芯进行检测,通过方位调节部件实现多方位的检测需求,提升检测效率,且检测精度大大提升,该检测装置采用多个高速视觉识别镜头,通过控制支撑架的转动,实现镜头与待测机芯的对准,对表盘拍照获得图像信息,进而获得检测时间数据,精确度高,真实模拟人眼观测的时间精度,能实现连续多天、各种方位下的检测。
附图说明
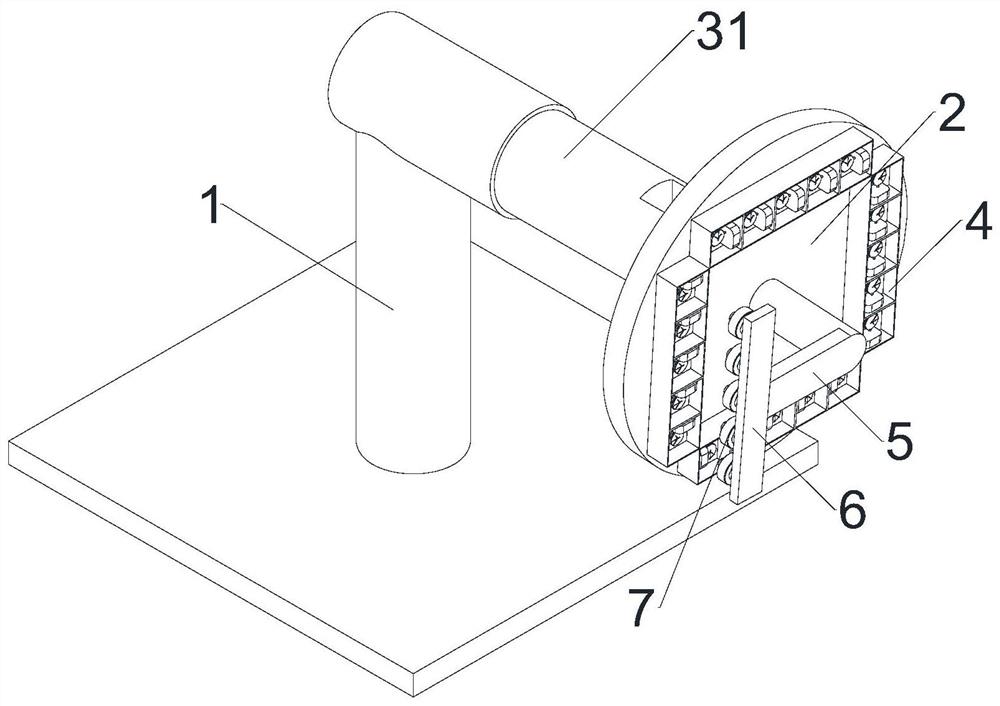
图1为本发明检测仪其一实施例的立体图;
图2为本发明检测仪又一实施例的立体图;
图3为本发明检测仪又一实施例的主视图;
图4为本发明待测工位呈环状分布的结构示意图;
图5为本发明待测工位呈辐射状分布的结构示意图;
图6为本发明待测工位呈辐射状分布的检测仪的结构示意图;
图7为本发明托盘组件的结构示意图。
图中标号说明:1、机架;11、支撑臂;12、底板;13、外筒;2、固定台;3、方位调节部件;31、旋转支撑轴;32、转轴;33、铰接轴;4、托盘组件;41、本体;42、隔板;43、夹具;44、自动上弦器;5、安装板;6、支撑架;7、图像采集部件;9、待测机芯。
具体实施方式
为了更好地了解本发明的目的、结构及功能,下面结合附图,对本发明的一种走时精度检测仪做进一步详细的描述。
如图1所示,本发明的走时精度检测仪,包括机架1,机架1上设置方位调节部件3,方位调节部件3端部设有固定台2,固定台2上相对的设置固定待测机芯9的托盘组件4和图像采集部件7,托盘组件4包括多个待测工位,托盘组件4上方设置图像采集部件7,图像采集部件7与控制器连接,通过图像采集部件7和托盘组件4相对转动使图像采集部件7与各待测工位的待测机芯9对准,并对待测机芯9的表盘拍照,以获取待测机芯9的检测时间数据,控制器同步获取标准时间数据,通过比较检测时间数据和标准时间数据以获得手表的走时误差。
通常的,机械手表的检测方位分为表面朝上、表面朝下、表把朝上、十二点位朝上、六点位朝上、九点位朝上等位置。如图1和图2所示,机架1包括底板12和固定在底板12顶面的呈竖直状态的支撑臂11,支撑臂顶部设置水平方向的外筒13,方位调节部件3包括旋转支撑轴31和转轴32,旋转支撑轴31一端转动的固定在外筒13上,旋转支撑轴31内设电机可驱动旋转支撑轴31以使固定台2在竖直平面内转动,旋转支撑轴31的另一端通过铰接轴33与转轴32铰接,转轴32的另一端与固定台2固定连接,与转轴32铰接的旋转支撑轴31端部也设有电机,以驱动转轴32绕旋转支撑轴31做往复翻转动作,从而实现对检测方位的控制。
托盘组件4的每个待测工位均包括方形的本体41,本体41为开口向上的盒体,各待测工位内设有用于固定待测机芯9的夹具43,在夹具43一侧的待测工位内设置自动上弦器44,待测机芯9具有统一的表盘和表针,通过夹具43固定在待测工位使其在任意位置都不松动,待测机芯9的表把置于自动上弦器44内,使其可以被自动上弦。
在检测的过程中,并非托盘组件4的所有待测工位都被占用,空余的待测工位并不会影响整个检测过程的实施,图像采集部件7的数量包括一个或多个,图像采集部件7为多个时,最大值可与待测工位的数量一致。
多个待测工位分布至少一条同心圆环上,同心圆环的数量可根据固定台2的尺寸而定,通常的,同心圆环可为1-8条,如图4所示,固定台2上排布了4条由待测工位构成的同心圆环。在一个实施例中,多个待测工位分布同一条同心圆环上,图像采集部件7滑动的设置在环形轨道上,图像采集部件7包括至少一个,至少一个图像采集部件7与驱动结构相连,以驱动图像采集部件7沿环形轨道滑动,从而使图像采集部件7与各待测工位对准。驱动结构包括电机,电机的驱动轴上固定齿轮,齿轮与环形齿条啮合,图像采集部件7固定在环形齿条上,环形齿条滑动的固定在环形轨道上。
在第二个实施例中,多个待测工位分布在直径不同的同心圆环上,同心圆环对应的设置多条环形轨道,每条环形轨道上均滑动的设置图像采集部件7,图像采集部件7与驱动结构连接,驱动结构驱动图像采集部件7相对待测工位转动,以使图像采集部件7与对应环形轨道上的待测工位对准。
或者,图像采集部件7的数量仅为一个,通过平移结构固定在支撑板上,支撑板沿同行圆环的半径方向设置,支撑板滑动的固定在环形轨道上,支撑板与驱动结构连接,通过平移结构和驱动结构使图像采集部件7与各待测工位对准。
在第三个实施例中,多个待测工位分为多组,每组内待测工位呈线性分布,如图7所示,托盘组件4包括五个待测工位,本体41内设置多个隔板42,隔板42将本体41分割成五个待测工位,五个待测工位呈线性分布。
如图5-图6所示,各组待测工位呈辐射状分布,对应的,图像采集部件7的数量包括一个或多个,当图像采集部件7的数量为一个时,图像采集部件7通过平移结构固定在待测工位上方的固定杆上,固定杆滑动的设置在环形轨道上,固定杆与驱动结构连接,通过平移结构使图像采集部件7与每组内的各待测工位对准,驱动结构驱动固定杆在环形轨道上滑动,使固定杆与不同组的待测工位对准。
对于待测工位呈圆形、辐射状或者环形排布时,由于需要测试不同方位下的走时误差,在固定托盘组件4时,需要保证自动上弦器位于待测工位的同一位置即可,如均设置在待测工位的右下角、右上角等,具体设置方式可根据测试需求而定。
当图像采集部件7为多个时,可省略平移结构,直接将图像采集部件7固定在固定杆上,固定杆通过滑块滑动的设置在环形轨道上,固定杆与其中一组待测工位互相平行,图像采集部件7与每组的待测工位一一对应,滑块与驱动结构连接,驱动结构驱动滑块在环形轨道上滑动,使图像采集部件7与每组待测工位对准。
作为第三实施例的变形,如图1所示,多组待测工位位于等边多边形的边上,图像采集部件7包括一个或多个,当图像采集部件7的数量为一个时,图像采集部件7通过平移结构固定在待测工位上方的支撑架6上,支撑架6与旋转结构连接。当图像采集部件7的数量与待测工位的数量一致时,可以省略平移结构,图像采集部件7直接固定在支撑架6上,支撑架6与旋转结构连接即可。
如图1所示,支撑架6的中心处固定在L型安装板5的端部,安装板5转动的固定在固定台2上,通过旋转安装板5以使图像采集部件7与待测机芯9对准。
安装板5的一端转动的固定在固定台2上,安装板5与固定台2之间的交点处于各托盘组件4围城图形的中心处,安装板5的另一端与支撑架6固定连接。
除此之外,托盘组件4还可以固定在支撑架6上,支撑架6为板状结构,支撑架6的中心处与线型安装板5的一端固定连接,安装板5的另一端转动的固定在固定台2的中心处,图像采集部件7固定在固定台2上,通过转动安装板5使图像采集部件7与待测机芯9对准。
如图1和图2所示,托盘组件4的数量为4个,四个托盘组件4的首尾依次连接构成正方形,安装板5的端部位于上述正方形的中心处。
平移结构可为丝杠丝母传动结构、齿轮齿条传动结构、蜗轮蜗杆传动结构、皮带传动结构、伸缩杆等其他直线传动结构。
除此之外,所有的排布中,还包括图像采集部件7的数量与所有待测工位的数量一致的情况,此时,图像采集部件7直接与所有待测工位一一对应的固定在支撑架6上即可;对于图像采集部件7的数量选择及图像采集部件7与待测工位对应关系的变换组合,均在本申请保护的范围内。
标准时间数据通过控制器获取原子钟或者卫星授时信号源等的标准时间得到,通过标准时间获得相应时间下标准时数值、标准分数值和标准秒数值,以原子钟为例,原子钟通过数据通信线缆连接到数据采集模块,数据采集模块与控制器连接。
该走时精度检测仪设置多个待测工位,可同时对大量的机芯进行检测,通过方位调节部件3实现多方位的检测需求,提升检测效率,且检测精度大大提升,该检测装置采用多个高速视觉识别镜头,通过控制支撑架6的转动,实现镜头与待测机芯9的对准,对表盘拍照获得图像信息,进而获得检测时间数据,精确度高,真实模拟人眼观测的时间精度,能实现连续多天、各种方位下的检测。
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。