用于时钟驯服的频率偏移量分析方法
文献发布时间:2023-06-19 18:27:32
技术领域
本发明涉及时间传递技术领域,尤其涉及一种用于时钟驯服的频率偏移量分析方法。
背景技术
时间是物理学中 7 个基本物理量之一,与人们的日常生活、科技发展密切相关。随着生产的发展和科学的进步,人们对时间的准确度以及各钟之间的时间同步精度要求越来越高。恒温晶振(OCXO)、铷原子钟是目前工程中常用的时钟源,具有较高的短期稳定度,但仍存在老化以及其他原因差带来频率漂移。所以,在实际应用中,我们常使用北斗、GPS等GNSS卫星导航系统对恒温晶振(OCXO)或铷原子钟进行驯服操作,可以能够有效解决老化以及长期稳定性差带来频率漂移等问题,获得高精度频率标准。
常用的本地时钟(例如恒温晶振或铷原子钟)驯服方式如图1所示,为本地时钟外接一个GNSS授时接收机,作为外部参考频率源,使用其输出的秒脉冲与自身产生的秒脉冲计算相位差,计算出本地时钟本身的频率差值(频率偏移量),通过一定关系换算为本地时钟频率控制值,并将控制值写入本地时钟。这个计算-控制的过程循环往复,最终使得本地时钟的频率准确度极大提升并能够长期保持,现有技术中计算频率偏移量时,一般都是对数据滤波后直接计算,通过牺牲一些精确度来简化计算过程,提高运行速度,因此传统的计算方式精确度低,因此时钟的驯服水平低。
发明内容
本发明的目的就在于为了解决上述问题设计了一种用于时钟驯服的频率偏移量分析方法。
本发明通过以下技术方案来实现上述目的:
用于时钟驯服的频率偏移量分析方法,包括:
S1、获取当前观测数据和历史观测数据;
S2、修正历史观测数据,具体包括:
S21、假设当前的本地时钟频率控制值为C
S22、数据n的相位修正值计算方法为
S23、数据n的相位经过修正后的值为
S3、处理当前观测数据和修正后历史观测数据的异常数据;
S4、采用加权最小二乘法对处理后的数据进行直线拟合计算频率偏移量。
本发明的有益效果在于:本方法提出了一种适应当前设备特点的频率偏移量分析方法,用于计算本地时钟本身的频率差值即频率偏移量,其优点是数据利用程度高,计算结果更准确;应用本方法计算的频率偏移量参与时钟驯服,可以显著优化时钟的驯服水平,改善本地时钟驯服后的频率准确度以及频率稳定度。
附图说明
图1是传统常见的时钟驯服示意图;
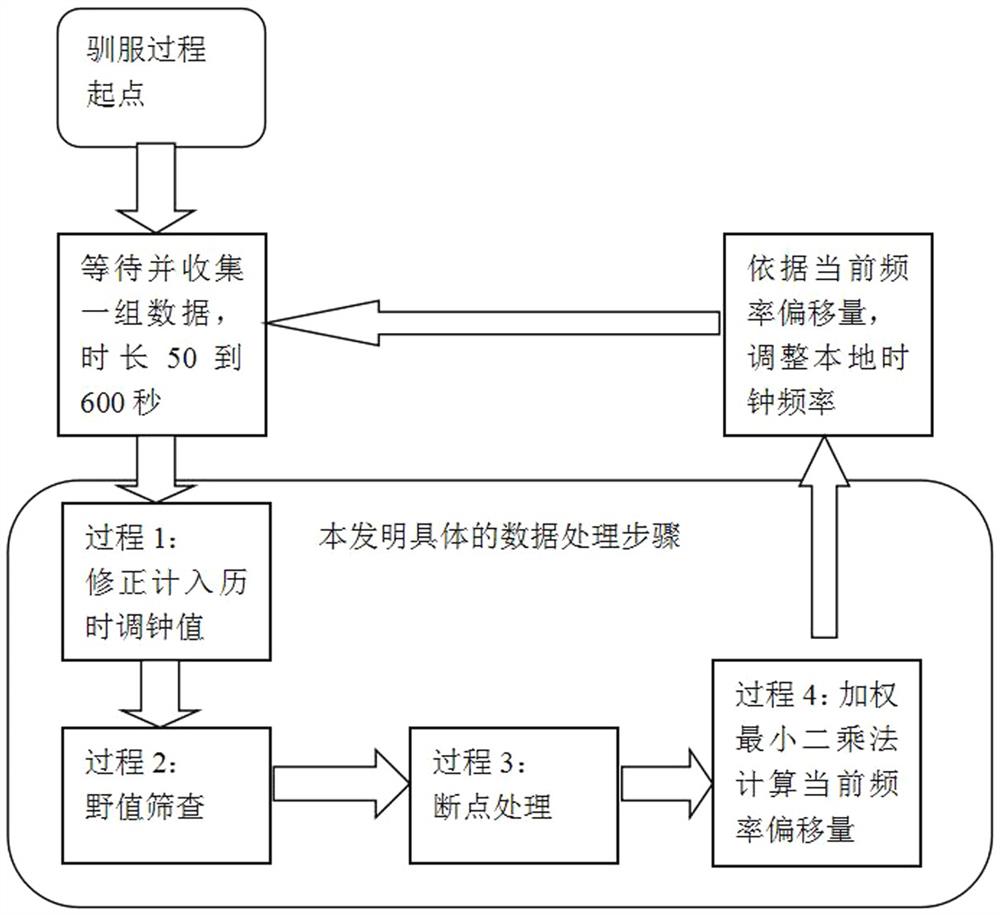
图2是本发明用于时钟驯服的频率偏移量分析方法的流程示意图;
图3是某授时型GNSS卫星接收机发生的一次“阶跃”现象。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
在本发明的描述中,需要理解的是,术语“上”、“下”、“内”、“外”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,或者是本领域技术人员惯常理解的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,“设置”、“连接”等术语应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
下面结合附图,对本发明的具体实施方式进行详细说明。
如图2所示,用于时钟驯服的频率偏移量分析方法,包括:
S1、获取当前观测数据和历史观测数据。
由于在驯服过程中,需要不断的GNSS卫星接收机获取卫星授时系统提供的高精度时钟信号,由于通信信道的不确定性,卫星信号受到干扰而抖动,导致信号呈现短期稳定度差而长期稳定度好的特点,需要使用较长时间的观测数据才能获得足够的精度,也就是说,观测时间越长,观测能够获得的精度越高;与此同时,本地时钟因为温度、老化等原因,呈现短期稳定度好而长期稳定度差的特点,也就是说,调节的时间间隔越短,本地时钟精度越高;因此随着驯服精度不断提高,就带来一个问题。现有技术方案中,观测时间和调节间隔是同步的,也就是观测一段时间,再使用这段时间的观测数据计算频率偏移量后执行对应调节动作。想要继续提高精度,就需要更长的观测时间与更短的调节间隔之间,这本身就互相矛盾。
因此本方法采用的解决办法是将本组观测之前一段时间的观测数据(组)同样纳入本次计算。
S2、修正历史观测数据;由于驯服过程中,本地时钟执行的频率控制值会阶段变化,一般而言,前一段时间的观测数据(组)由于频率控制值不同,不能与本组数据一同直接参与计算,需要预先作一定的处理。处理的原理是以当前时刻之间为基准,将数据发生时刻为与当前时刻之间的本地时钟频率控制值的差异,换算为(两个时间点之间的)频率的差值,然后按时间进行积分,最后将积分结果作为相位修正值叠加到欲加入的数据的相位值上。
修正数据具体为:
S21、假设当前的本地时钟频率控制值为C
S22、数据n的相位修正值计算方法为
S23、数据n的相位经过修正后的值为
S3、处理当前观测数据和修正后历史观测数据的异常数据;具体包括:
在驯服过程中,需要不断的GNSS卫星接收机获取卫星授时系统提供的高精度时钟信号。由于通信信道的不确定性,卫星信号受到干扰;或者因为不同导航系统的卫星之间存在的钟差。GNSS卫星接收机在工作中会出现偶发的相位突跳,导致数据异常,对应的观测数据被称为"野值"。在实际应用中,必须对这种"野值"进行识别和滤波;
S31、采用拉依达准则和接收机报文内容判断两种方法共同来筛选异常数据,即"野值"。数据需要同时经过两种方法进行筛选,任何一个方式筛选为异常数据就认定该数据异常,并对异常数据做异常丢弃标记。接收机报文内容判断筛选的标准为:当前卫星接收机输出NMEA0183协议GGA报文中,当卫星数量小于等于4,或定位状态标识为“无效”状态,认定该观测数据为异常数据;参与拉依达准则判断的数据并非观测数据(组)中相位为ph或修正相位数据ph-fix,而是相邻时间之间的(修正)相位差
按拉依达准则筛选出的一个异常值,会关联两个观测数据中相位修正值。需要对这两个值都判断为“野值”,做异常丢弃标;
连续观测的数据经过野值筛查后,原本连续的数据会缺失部分。这些缺失的数据一般分散点状出现,称为断点。此外,由于各种原因,观测数据中的相位可能偶发程度不同的、类似“阶跃”的现象,如图3所示就是一次某授时型GNSS卫星接收机发生的“阶跃”现象。
经过野值筛查后,“阶跃”现象发生前后的点都能被拉依达准则判定为野值点,但这并不能消除“阶跃”现象对计算频率偏移量的影响,因为“阶跃”前后的相位差任然存在。
本方法的对此采用了的办法是分段处理,把数据看作原本连续的数据被断点分割后的若干段独立数据,再重新拼接成一段数据,重新拼接的过程会跳过因“阶跃”造成的断点并重新开始累积偏移,从而避免“阶跃”现象对计算频率偏移量造成影响:
分段处理具体为:
S32、从异常丢弃标记序列开头Mark
S33、判断是否寻找到Mark
S34、重复S33与S34,直到当前观测数据(组)中数据Mark
S35、对每一组Mark
对应的修正后相位序列ph-fix
将对应的时间序列t
S4、采用加权最小二乘法对处理后的数据进行直线拟合计算频率偏移量,具体包括:
S41、建立一个数量为n的数据集合Weight,用来代表数据集合X、Y中对应元素的加权值,Weight具体加权值由最初的观测数据(组)中时间序列t
S42、带入权重采用最小二乘法直线拟合公式进行直线拟合计算频率偏移量,表示为
然后便可以根据当前频率偏移量调整本地时钟频率。
本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。