一种智能手表摘取系统及方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及摘取领域,更具体地说是一种智能手表摘取系统及方法。
背景技术
智能手表是具有信息处理能力,符合手表基本技术要求的手表;智能手表除指示时间之外,还应具有提醒、导航、校准、监测、交互等其中一种或者多种功能;随着智能化生活的普及,佩戴智能手表的人们越来越多,现有技术中人们在摘取智能手表手边时,一般使用手进行穿戴,而当一个人拥有多个智能手表或者当需要对多个型号的智能手表进行穿戴更换时,人工摘取的效率低下,并且容易对智能手表造成一定的损伤,并且也无法对摘取下来的智能手表进行有效的存储。
发明内容
本发明的目的是提供一种智能手表摘取系统及方法,可以快速将智能手表从手上摘取,并且进行存储。
本发明的目的通过以下技术方案来实现:
一种智能手表摘取系统,包括支撑环,支撑环上固定连接有连接板,支撑环的左右两侧均铰接有两个连杆,四个连杆分别铰接在两个安装板上,两个安装板上均固定连接有驱动其中一个连杆进行摆动的动力机构Ⅰ,动力机构Ⅰ优选为伺服电机;
连接板上固定连接有伸缩机构Ⅰ,伸缩机构Ⅰ的伸缩端上固定连接有升降支架Ⅰ,升降支架Ⅰ上转动连接有丝杆Ⅰ,升降支架Ⅰ上固定连接有驱动丝杆Ⅰ进行转动的动力机构Ⅱ,动力机构Ⅱ优选为伺服电机;
升降支架Ⅰ上滑动连接有横移支架,横移支架通过螺纹连接在丝杆Ⅰ上,横移支架上转动连接有转动盘,横移支架上固定连接有驱动转动盘进行转动的动力机构Ⅲ,动力机构Ⅲ优选为伺服电机,转动盘上固定连接有摘取支架Ⅰ,摘取支架Ⅰ上转动连接有丝杆Ⅱ,丝杆Ⅱ两端的螺纹旋向相反,摘取支架Ⅰ上固定连接有驱动丝杆Ⅱ进行转动的动力机构Ⅳ,动力机构Ⅳ优选为伺服电机,摘取支架Ⅰ上滑动连接有两个摘取滑块Ⅰ,两个摘取滑块Ⅰ分别通过螺纹连接在丝杆Ⅱ的两端,每个摘取滑块Ⅰ上均固定连接有摘取侧板Ⅰ,每个摘取侧板Ⅰ的底部均固定连接有两个插块,每个摘取侧板Ⅰ上均滑动连接有摘取侧板Ⅱ,摘取侧板Ⅱ和摘取侧板Ⅰ之间固定连接有压缩弹簧;
支撑环上转动连接有转动环,支撑环上固定连接有驱动转动环进行转动的动力机构Ⅴ,动力机构Ⅴ优选为伺服电机,转动环上转动连接有多个放置环;
支撑环上固定连接有安装支架,安装支架上固定连接有两个传感支架,两个传感支架上均固定连接有传感器;
安装支架上固定连接有伸缩机构Ⅱ,伸缩机构Ⅱ的伸缩端上固定连接有升降支架Ⅱ,升降支架Ⅱ上转动连接有丝杆Ⅲ,升降支架Ⅱ上固定连接有驱动丝杆Ⅲ进行转动的动力机构Ⅵ,动力机构Ⅵ优选为伺服电机,丝杆Ⅲ两端的螺纹旋向相反;
升降支架Ⅱ上滑动连接有两个摘取滑块Ⅱ,两个摘取滑块Ⅱ分别通过螺纹连接在丝杆Ⅲ的两端,每个摘取滑块Ⅱ上均固定连接有两个摘取机构;
摘取机构包括摘取支架,摘取支架上转动连接有丝杆Ⅳ,摘取支架上固定连接有驱动丝杆Ⅳ进行转动的动力机构Ⅶ,动力机构Ⅶ优选为伺服电机,摘取支架上滑动连接有两个摘取滑块Ⅲ,两个摘取滑块Ⅲ分别通过螺纹连接在丝杆Ⅳ的两端,每个摘取滑块Ⅲ上均转动连接有伸缩机构Ⅲ,摘取支架上固定连接有驱动伸缩机构Ⅲ进行转动的动力机构Ⅷ,动力机构Ⅷ优选为伺服电机,每个伸缩机构Ⅲ的伸缩端上均固定连接有夹取板Ⅰ,每个伸缩机构Ⅲ上均固定连接有伸缩机构Ⅳ,每个伸缩机构Ⅳ的伸缩端上均固定连接有夹取板Ⅱ。
一种智能手表摘取的方法,该方法包括以下步骤:
步骤一:将手腕放置在两个传感器之间,两个传感器用于感应手腕的位置;
步骤二:四个摘取机构相互配合运动,将智能手表的手表带解开;
步骤三:两个摘取侧板Ⅰ相互靠近运动,四个插块插入到智能手表和手腕之间,将智能手表取下;
步骤四:将取下的智能手表存放在多个放置环中的一个上。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
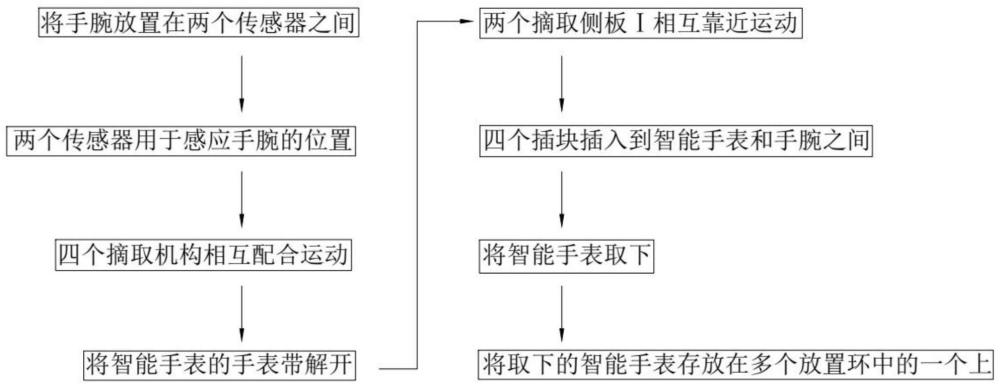
图1是本发明的智能手表摘取方法示意图;
图2是本发明的智能手表摘取系统示意图;
图3是本发明的支撑环结构示意图;
图4是本发明的升降支架Ⅰ结构示意图;
图5是本发明的摘取支架结构示意图;
图6是本发明的摘取滑块结构示意图;
图7是本发明的转动环结构示意图;
图8是本发明的安装支架结构示意图;
图9是本发明的传感支架结构示意图;
图10是本发明的升降支架Ⅱ结构示意图;
图11是本发明的摘取机构结构示意图;
图12是本发明的摘取机构结构示意图。
图中:
支撑环11;连接板12;连杆13;安装板14;
伸缩机构Ⅰ21;升降支架Ⅰ22;丝杆Ⅰ23;
横移支架31;转动盘32;摘取支架Ⅰ33;丝杆Ⅱ34;摘取滑块Ⅰ35;摘取侧板Ⅰ36;插块37;摘取侧板Ⅱ38;
转动环41;放置环42;
安装支架51;传感支架52;传感器53;
伸缩机构Ⅱ61;升降支架Ⅱ62;丝杆Ⅲ63;
摘取滑块Ⅱ71;摘取支架72;丝杆Ⅳ73;摘取滑块Ⅲ74;伸缩机构Ⅲ75;夹取板Ⅰ76;伸缩机构Ⅳ77;夹取板Ⅱ78。
具体实施方式
下面结合附图对本发明做进一步详细说明。
如图1至12所示,下面对一种智能手表摘取系统的结构和功能进行详细的说明;
一种智能手表摘取系统,包括支撑环11,支撑环11上固定连接有连接板12,支撑环11的左右两侧均铰接有两个连杆13,四个连杆13分别铰接在两个安装板14上,两个安装板14上均固定连接有驱动其中一个连杆13进行摆动的动力机构Ⅰ,动力机构Ⅰ优选为伺服电机;
连接板12上固定连接有伸缩机构Ⅰ21,伸缩机构Ⅰ21的伸缩端上固定连接有升降支架Ⅰ22,升降支架Ⅰ22上转动连接有丝杆Ⅰ23,升降支架Ⅰ22上固定连接有驱动丝杆Ⅰ23进行转动的动力机构Ⅱ,动力机构Ⅱ优选为伺服电机;
升降支架Ⅰ22上滑动连接有横移支架31,横移支架31通过螺纹连接在丝杆Ⅰ23上,横移支架31上转动连接有转动盘32,横移支架31上固定连接有驱动转动盘32进行转动的动力机构Ⅲ,动力机构Ⅲ优选为伺服电机,转动盘32上固定连接有摘取支架Ⅰ33,摘取支架Ⅰ33上转动连接有丝杆Ⅱ34,丝杆Ⅱ34两端的螺纹旋向相反,摘取支架Ⅰ33上固定连接有驱动丝杆Ⅱ34进行转动的动力机构Ⅳ,动力机构Ⅳ优选为伺服电机,摘取支架Ⅰ33上滑动连接有两个摘取滑块Ⅰ35,两个摘取滑块Ⅰ35分别通过螺纹连接在丝杆Ⅱ34的两端,每个摘取滑块Ⅰ35上均固定连接有摘取侧板Ⅰ36,每个摘取侧板Ⅰ36的底部均固定连接有两个插块37,每个摘取侧板Ⅰ36上均滑动连接有摘取侧板Ⅱ38,摘取侧板Ⅱ38和摘取侧板Ⅰ36之间固定连接有压缩弹簧;
支撑环11上转动连接有转动环41,支撑环11上固定连接有驱动转动环41进行转动的动力机构Ⅴ,动力机构Ⅴ优选为伺服电机,转动环41上转动连接有多个放置环42;
支撑环11上固定连接有安装支架51,安装支架51上固定连接有两个传感支架52,两个传感支架52上均固定连接有传感器53;
安装支架51上固定连接有伸缩机构Ⅱ61,伸缩机构Ⅱ61的伸缩端上固定连接有升降支架Ⅱ62,升降支架Ⅱ62上转动连接有丝杆Ⅲ63,升降支架Ⅱ62上固定连接有驱动丝杆Ⅲ63进行转动的动力机构Ⅵ,动力机构Ⅵ优选为伺服电机,丝杆Ⅲ63两端的螺纹旋向相反;
升降支架Ⅱ62上滑动连接有两个摘取滑块Ⅱ71,两个摘取滑块Ⅱ71分别通过螺纹连接在丝杆Ⅲ63的两端,每个摘取滑块Ⅱ71上均固定连接有两个摘取机构;
摘取机构包括摘取支架72,摘取支架72上转动连接有丝杆Ⅳ73,摘取支架72上固定连接有驱动丝杆Ⅳ73进行转动的动力机构Ⅶ,动力机构Ⅶ优选为伺服电机,摘取支架72上滑动连接有两个摘取滑块Ⅲ74,两个摘取滑块Ⅲ74分别通过螺纹连接在丝杆Ⅳ73的两端,每个摘取滑块Ⅲ74上均转动连接有伸缩机构Ⅲ75,摘取支架72上固定连接有驱动伸缩机构Ⅲ75进行转动的动力机构Ⅷ,动力机构Ⅷ优选为伺服电机,每个伸缩机构Ⅲ75的伸缩端上均固定连接有夹取板Ⅰ76,每个伸缩机构Ⅲ75上均固定连接有伸缩机构Ⅳ77,每个伸缩机构Ⅳ77的伸缩端上均固定连接有夹取板Ⅱ78。
如图2至12所示,使用时将佩戴智能手表的手腕放置在两个传感器53之间,传感器53可以是光栅,当两个传感器53之间伸入佩戴智能手表的手腕时,手腕会对两个传感器53之间的光路进行遮挡,进而两个传感器53确认有手腕伸入到系统内,系统启动进行工作;
进一步的,两个传感器53可以根据手腕遮挡的位置,初步判断手腕的高度,方便摘取机构对智能手表进行摘取;
启动伸缩机构Ⅰ21,伸缩机构Ⅰ21可以是液压缸或者电动推杆,伸缩机构Ⅰ21的伸缩端带动升降支架Ⅰ22进行运动,升降支架Ⅰ22带动横移支架31进行运动,横移支架31带动转动盘32进行运动,转动盘32带动摘取支架Ⅰ33进行运动,摘取支架Ⅰ33带动两个摘取滑块Ⅰ35进行运动,两个摘取滑块Ⅰ35带动两个摘取侧板Ⅰ36进行运动,两个摘取侧板Ⅰ36分别带动对应的插块37进行运动,进而调整插块37的高度,使得插块37运动到手腕和智能手表之间位置的高度;
启动动力机构Ⅳ,动力机构Ⅳ的输出轴开始转动,动力机构Ⅳ的输出轴带动丝杆Ⅱ34进行转动,丝杆Ⅱ34转动时通过螺纹带动两个摘取滑块Ⅰ35进行运动,两个摘取滑块Ⅰ35相互靠近或者远离,两个摘取滑块Ⅰ35相互靠近,两个摘取滑块Ⅰ35带动两个摘取侧板Ⅰ36相互靠近,两个摘取侧板Ⅰ36分别带动其上固定连接的两个插块37进行运动,使得插块37插入到智能手表和手腕之间;
进一步的,智能手表的前后两侧分别和两个摘取侧板Ⅱ38接触,两个摘取侧板Ⅱ38用于辅助对智能手表进行固定;
插块37插入到智能手表和手腕之间后,启动伸缩机构Ⅱ61,伸缩机构Ⅱ61可以是液压缸或者电动推杆,伸缩机构Ⅱ61的伸缩端带动升降支架Ⅱ62进行运动,进而调整升降支架Ⅱ62的高度,升降支架Ⅱ62带动两个摘取滑块Ⅱ71进行运动,进而调整两个摘取滑块Ⅱ71的高度,两个摘取滑块Ⅱ71带动四个摘取机构进行运动,进而调整四个摘取机构的高度,使得四个摘取机构运动到智能手表的下侧;
启动位移左侧摘取滑块Ⅱ71上位于右侧的摘取机构,其中该摘取机构上的伸缩机构Ⅲ75和伸缩机构Ⅳ77,伸缩机构Ⅲ75和伸缩机构Ⅳ77可以是液压缸或者电动推杆,伸缩机构Ⅲ75和伸缩机构Ⅳ77的伸缩端带动对应的夹取板Ⅰ76和夹取板Ⅱ78进行运动,使得夹取板Ⅰ76和夹取板Ⅱ78运动到左表带插入到定位环之间的位置,即锁扣和定位环之间表带的位置,启动动力机构Ⅶ,动力机构Ⅶ的输出轴开始转动,动力机构Ⅶ的输出轴带动丝杆Ⅳ73进行转动,丝杆Ⅳ73转动时通过螺纹带动两个摘取滑块Ⅲ74进行运动,使得两个摘取滑块Ⅲ74相互靠近运动,两个摘取滑块Ⅲ74带动其上的两个伸缩机构Ⅲ75相互靠近运动,进而使得夹取板Ⅱ78插入到左表带压在右表带的部分之间,夹取板Ⅰ76和左表带接触,进而夹取板Ⅰ76和夹取板Ⅱ78对左表带进行装夹,启动伸缩机构Ⅲ75和伸缩机构Ⅳ77,伸缩机构Ⅲ75和伸缩机构Ⅳ77的伸缩端收回,伸缩机构Ⅲ75和伸缩机构Ⅳ77的伸缩端带动夹取板Ⅰ76和夹取板Ⅱ78进行运动,进而使得夹取板Ⅰ76和夹取板Ⅱ78拉动左表带脱离定位环,同时启动动力机构Ⅷ,动力机构Ⅷ的输出轴带动伸缩机构Ⅲ75进行摆动,使得被夹住的左表带向左侧进行运动,进而使得锁扣上的插柱脱离左表带上的插口,同时启动位于右侧摘取滑块Ⅱ71上左侧的摘取机构,启动该摘取机构上的动力机构Ⅷ、摘取滑块Ⅲ74和伸缩机构Ⅲ75,控制夹取板Ⅰ76和夹取板Ⅱ78进行运动,使得夹取板Ⅰ76和夹取板Ⅱ78对锁扣部分的插柱进行装夹,启动该摘取机构上的动力机构Ⅷ、摘取滑块Ⅲ74和伸缩机构Ⅲ75,控制夹取板Ⅰ76和夹取板Ⅱ78进行运动,使得夹取板Ⅰ76和夹取板Ⅱ78将装夹的插柱从左表带上的插口上拔出;
启动位于左侧摘取滑块Ⅱ71上左侧的摘取机构,启动该摘取机构上的动力机构Ⅷ、摘取滑块Ⅲ74和伸缩机构Ⅲ75,控制夹取板Ⅰ76和夹取板Ⅱ78进行运动,夹取板Ⅰ76和夹取板Ⅱ78对左表带和手腕之间的部分进行装夹;
启动位于左侧摘取滑块Ⅱ71上右侧的摘取机构,启动该摘取机构上的动力机构Ⅷ、摘取滑块Ⅲ74和伸缩机构Ⅲ75,控制夹取板Ⅰ76和夹取板Ⅱ78进行运动,夹取板Ⅰ76和夹取板Ⅱ78开发对左表带的装夹;
启动位于右侧摘取滑块Ⅱ71上右侧的摘取机构,启动该摘取机构上的动力机构Ⅷ、摘取滑块Ⅲ74和伸缩机构Ⅲ75,控制夹取板Ⅰ76和夹取板Ⅱ78进行运动,夹取板Ⅰ76和夹取板Ⅱ78对右表带和手腕之间的部分进行装夹;
启动动力机构Ⅵ,动力机构Ⅵ的输出轴开始转动,动力机构Ⅵ的输出轴带动丝杆Ⅲ63进行转动,丝杆Ⅲ63转动时通过螺纹带动两个摘取滑块Ⅱ71进行运动,使得两个摘取滑块Ⅱ71相互远离,进而驱动智能手表的左表带和右表带分离;
启动伸缩机构Ⅰ21,伸缩机构Ⅰ21的伸缩端向上进行运动,使得四个插块37向上进行运动,启动摘取机构,摘取机构放开对智能手表表带的装夹,进而将智能手表从手腕上取下,启动动力机构Ⅲ,动力机构Ⅲ的输出轴开始转动,动力机构Ⅲ的输出轴带动转动盘32进行转动,转动盘32带动摘取支架Ⅰ33进行转动,进而使得智能手表进行转动,智能手表转动90°,启动动力机构Ⅱ,动力机构Ⅱ的输出轴带动丝杆Ⅰ23进行转动,丝杆Ⅰ23转动时通过螺纹带动横移支架31进行运动,使得横移支架31横向运动,进而带动智能手表横向运动,使得智能手表运动到放置环42的上侧,启动伸缩机构Ⅰ21,伸缩机构Ⅰ21的伸缩端向下进行运动,使得智能手表放置在放置环42上;
启动动力机构Ⅳ,动力机构Ⅳ的输出轴带动丝杆Ⅱ34进行转动,丝杆Ⅱ34转动时通过螺纹带动两个摘取侧板Ⅰ36相互远离,智能手表在两个摘取侧板Ⅱ38的推动下,从两个摘取侧板Ⅰ36之间脱离放置在放置环42上;
进一步的,可以启动动力机构Ⅴ,动力机构Ⅴ的输出轴带动转动环41进行转动,转动环41带动多个放置环42进行转动,进而更换多个放置环42的位置,使得智能手表能够放置在不同的放置环42上;
进一步的,如图7所示,放置环42是偏向转动连接在转动环41上的,进而保证在转动环41转动的过程中,放置环42在重力的作用下,保证一个位置方向,进而保证智能手表也是不会跟随转动环41进行转动的;
进一步的,当需要取出智能手表时,启动动力机构Ⅴ即可,将需要取出的智能手表运动到两个摘取侧板Ⅰ36的下侧,通过两个摘取侧板Ⅰ36将智能手表取出。
如图1所示,一种智能手表摘取的方法,该方法包括以下步骤:
步骤一:将手腕放置在两个传感器53之间,两个传感器53用于感应手腕的位置;
步骤二:四个摘取机构相互配合运动,将智能手表的手表带解开;
步骤三:两个摘取侧板Ⅰ36相互靠近运动,四个插块37插入到智能手表和手腕之间,将智能手表取下;
步骤四:将取下的智能手表存放在多个放置环42中的一个上。