用于感测旋转体的设备
文献发布时间:2023-06-23 06:30:03
本申请要求于2021年12月6日在韩国知识产权局提交的第10-2021-0173006号韩国专利申请的优先权的权益,该韩国专利申请的全部公开内容出于所有目的通过引用被包含于此。
技术领域
以下描述涉及一种用于感测旋转体的设备。
背景技术
通常,对用于与移动电话交互的数字手表的市场需求不断增加。具有与指针式手表(analog watch)的表冠的外形类似的外形的数字表冠被应用于数字手表(一种高科技数字装置)。
数字表冠作为数字手表的输入/输出(I/O)组件用于选择数字手表的功能,并产生输入信号以执行所选择的功能。
使用数字表冠选择和执行功能是通过对表冠的旋转操作和按压操作(平移操作)来执行的。选择菜单的代表性方法是如下的方法:将光照射到连接到表冠的轴,然后分析反射光的类型以检测旋转,并且该代表性方法使用弹簧和开关来实现。数字表冠可感测表冠的旋转角度,并且可向诸如手表等的装置(set)提供微小位移,以在装置中实现期望的功能。
包括上述数字表冠和轴的旋转体应用于各种领域,诸如需要小型化和纤薄化的可穿戴装置的电机和轮开关。根据这种趋势,检测旋转体的旋转角度的传感器需要具有用于检测旋转体的微小位移的技术,并且需要具有用于减小由感测结构占据的空间的小型化技术。
另外,可通过实现如下的数字表冠模块来获得期望的特性:该数字表冠模块感测表冠的旋转角度并向诸如手表的装置提供微小位移以在装置中实现期望的功能。
然而,根据现有技术的用于感测旋转体的设备遭受由组装组成结构时的偏差引起的它们之间的特性偏差的问题。例如,用于感测旋转体的设备可能遭受由其结构的组装偏差引起的波形偏差的问题。
上述信息仅作为背景信息呈现,以帮助获得对本公开的理解。上述记载不应被解释为这些内容属于本公开的现有技术。
发明内容
提供本发明内容以按照简化的形式对选择的构思进行介绍,下面在具体实施方式中进一步描述所述构思。本发明内容既不意在限定所要求保护的主题的关键特征或必要特征,也不意在用作帮助确定所要求保护的主题的范围。
在一个总体方面,一种用于感测旋转体的设备包括:旋转体,包括检测目标部;图案部,沿所述旋转体旋转的方向设置在所述检测目标部中;框架,可旋转地支撑所述旋转体;第一传感器,被设置成与所述检测目标部的第一区域相对;第二传感器,与所述第一传感器间隔开并且被设置成与所述检测目标部的第二区域相对;以及保持部,结合到所述框架以保持所述第一传感器和所述第二传感器。
在另一总体方面,一种用于感测旋转体的设备包括:旋转体,包括检测目标部;图案部,在所述旋转体旋转的方向上设置在所述检测目标部中,并且具有围绕所述检测目标部的单个带形状;框架,所述旋转体插入到所述框架中;第一传感器,被设置成与所述检测目标部的第一区域相对;第二传感器,被设置成与所述检测目标部的第二区域相对并且与所述第一传感器间隔开以相对于所述第一传感器形成预定角度;以及保持部,结合到所述框架以支撑所述第一传感器和所述第二传感器。
所述设备可包括基板,所述第一传感器和所述第二传感器设置在所述基板上,所述基板可具有多个孔,并且所述保持部可包括多个突出部,所述多个突出部被构造为插入到所述基板的所述多个孔中并结合到所述多个孔。
所述框架可包括相对侧主体部,并且所述相对侧主体部中的每个可具有通孔,所述旋转体插入到所述通孔中。所述框架还可包括多个支腿,所述多个支腿在插入到所述通孔中的所述旋转体周围沿与所述旋转体的轴向方向平行的方向设置在所述相对侧主体部之间。
所述框架的所述相对侧主体部中的每个可包括多个突起,所述多个突起被构造为结合到所述保持部。所述保持部可包括多个凹槽,所述多个凹槽设置在分别与所述框架的所述相对侧主体部的所述多个突起对应的位置,并且所述框架的所述相对侧主体部的所述多个突起可被构造为插入到所述保持部的所述多个凹槽中。
所述保持部可包括多个突起,所述多个突起被构造为:当所述保持部结合到所述框架的所述相对侧主体部时,与所述框架的所述相对侧主体部接触。所述相对侧主体部中的每个可包括多个贯通部,所述多个贯通部被构造为与所述保持部接触,并且所述保持部的所述多个突起可被构造为插入到所述框架的所述相对侧主体部的所述多个贯通部中并结合到所述多个贯通部。
所述框架可包括设置在结合到所述基板的第一部分和与所述保持部结合的第二部分之间的台阶。
所述设备可包括结合环,所述结合环设置在所述框架的所述相对侧主体部中的至少一个的所述通孔与所述旋转体之间,使得所述旋转体可旋转地且紧密地结合到所述框架的相应通孔。
所述基板可以是柔性印刷电路板(FPCB),并且所述第一传感器和所述第二传感器可设置在所述框架的所述多个支腿之间。
根据以下具体实施方式和附图,其他特征和方面将是易于理解的。
附图说明
图1是示出用于感测旋转体的设备的示例的示图。
图2是图1中所示的用于感测旋转体的设备的分解立体图。
图3是示出旋转体的示例的示图。
图4是示出框架的结构的示例的示图。
图5是示出框架、基板、第一传感器和第二传感器以及保持部的布置的示例的示图。
图6A是示出基板和保持部的分离状态的示例的示图。
图6B是示出基板和保持部的结合状态的示例的示图。
图7A是示出框架和保持部的分离状态的第一示例的示图。
图7B是示出框架和保持部的结合状态的第一示例的示图。
图8A是示出框架和保持部的分离状态的第二示例的示图。
图8B是示出框架和保持部的结合状态的第二示例的示图。
图9是示出用于结合基板和保持部的框架的台阶的示例的示图。
图10A是示出具有结合环的旋转体和框架的分离状态的示例的示图。
图10B是示出具有结合环的旋转体和框架的结合状态的示例的示图。
图11是示出第一传感器和第二传感器的示例的示图。
图12是示出旋转体、第一传感器和第二传感器的布置关系的示例的示图。
图13A是当不采用保持部时第一传感器和第二传感器的阻抗变化信号的曲线图。
图13B是当采用保持部时第一传感器和第二传感器的阻抗变化信号的曲线图。
在整个附图和具体实施方式中,相同的附图标记表示相同的要素。附图可能未按比例绘制,并且为了清楚、说明和方便,可夸大附图中的要素的相对尺寸、比例和描绘。
具体实施方式
提供以下具体实施方式以帮助读者获得对在此描述的方法、设备和/或系统的全面理解。然而,在理解本申请的公开内容之后,在此描述的方法、设备和/或系统的各种改变、修改和等同方案将是易于理解的。例如,除了必须以特定顺序发生的操作之外,在此描述的操作的顺序仅仅是示例,并且不限于在此阐述的操作的顺序,而是可做出在理解本申请的公开内容之后将是易于理解的改变。此外,为了提高清楚性和简洁性,可省略本领域已知的特征的描述。
在此描述的特征可以以不同的形式实施,并且不应被解释为局限于在此描述的示例。更确切地,提供在此描述的示例仅仅是为了说明在理解本申请的公开内容之后将是易于理解的实现在此描述的方法、设备和/或系统的许多可行方式中的一些可行方式。
在整个说明书中,当诸如层、区域或基板的要素被描述为“在”另一要素“上”、“连接到”另一要素或“结合到”另一要素时,该要素可直接“在”另一要素“上”、直接“连接到”另一要素或直接“结合到”另一要素,或者可存在介于它们之间的一个或更多个其他要素。相比之下,当要素被描述为“直接在”另一要素“上”、“直接连接到”另一要素或“直接结合到”另一要素时,不存在介于它们之间的其他要素。
如在此使用的,术语“和/或”包括相关所列项中的任意一项或者任意两项或更多项的任意组合。
尽管在此可使用诸如“第一”、“第二”和“第三”的术语来描述各种构件、组件、区域、层或部分,但这些构件、组件、区域、层或部分不受这些术语的限制。更确切地,这些术语仅用于将一个构件、组件、区域、层或部分与另一构件、组件、区域、层或部分区分开。因此,在不脱离示例的教导的情况下,在此描述的示例中提及的第一构件、第一组件、第一区域、第一层或第一部分也可被称为第二构件、第二组件、第二区域、第二层或第二部分。
为了易于描述,在此可使用诸如“上方”、“上面”、“下方”和“下面”的空间相关术语来描述如附图中所示的一个要素与另一要素的关系。这样的空间相关术语意在除了包含附图中描绘的方位之外,还包含装置在使用或操作中的不同方位。例如,如果附图中的装置被翻转,则描述为相对于另一要素位于“上方”或“上面”的要素于是将相对于另一要素位于“下方”或“下面”。因此,术语“上方”根据装置的空间方位包含“上方”和“下方”两种方位。装置还可以以其他方式(例如,旋转90度或者处于其他方位)定位,并且将相应地解释在此使用的空间相关术语。
在此使用的术语仅用于描述各个示例,并且不用于限制本公开。除非上下文另外清楚地指出,否则单数形式也意在包括复数形式。术语“包含”、“包括”和“具有”列举存在所陈述的特征、数量、操作、构件、要素和/或它们的组合,但是不排除存在或添加一个或更多个其他特征、数量、操作、构件、要素和/或它们的组合。
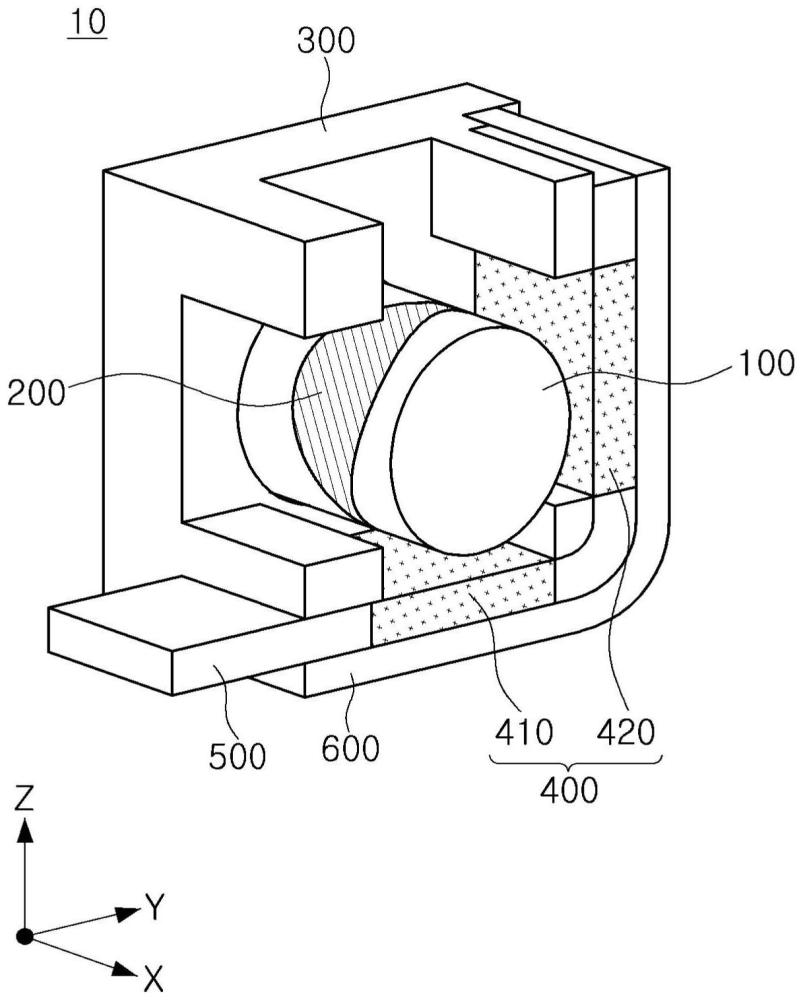
图1是示出用于感测旋转体的设备的示例的示图,并且图2是图1中示出的用于感测旋转体的设备的分解立体图。
参照图1和图2,用于感测旋转体的设备10可包括旋转体100、图案部200、框架300、包括第一传感器410和第二传感器420的传感器部400以及保持部600。
旋转体100可利用非导电材料制成,并且可包括检测目标部110。
图案部200可利用导电材料制成,并且可沿旋转体100旋转的方向设置在检测目标部110中。例如,图案部200可具有围绕检测目标部110的单个带的形状。
框架300可利用非导电材料制成。旋转体100可插入到框架300中。框架300可以可旋转地支撑旋转体100。具体地,框架300可具有旋转体100插入到其中的通孔311。旋转体100可以可旋转地插入到通孔311中。
第一传感器410可被设置成与检测目标部110的一个区域相对,并且可检测旋转体100的旋转。
第二传感器420可与第一传感器410间隔开,并且被设置成与检测目标部110的另一区域相对,并且可检测旋转体100的旋转。作为示例,第二传感器420可与第一传感器410间隔开以相对于第一传感器410形成预定角度。
保持部600可如下所述结合到框架300以减小由制造偏差或组装偏差导致的检测信号的偏差,因此,可牢固地保持第一传感器410和第二传感器420。
例如,当第一传感器410和第二传感器420中的每个的一个表面是感测表面并且与感测表面相对的表面是另一表面时,保持部600可设置在第一传感器410和第二传感器420中的每个的另一表面上,并且可如下所述机械地结合到框架300以牢固地固定第一传感器410和第二传感器420。这样的描述可应用于在此讨论的每个示例。
作为示例,用于感测旋转体的设备10可包括基板500。
第一传感器410和第二传感器420可设置在基板500处。作为示例,第一传感器410和第二传感器420可设置在基板500的上表面上和/或设置在基板500中。
第一传感器410和第二传感器420可作为印刷图案设置在基板500上,并且可用保持部600牢固地保持基板500,以减小结构组装偏差或制造偏差。
作为示例,保持部600可被设置为牢固地保持其上设置有第一传感器410和第二传感器420的基板500。为此,保持部600可由包括用于感测旋转体的设备10的数字手表的内部结构支撑。
在在此讨论的每个附图中,将不提供与相同附图标记和相同功能相关的不必要的重复描述,并且将描述图中的示例之间的主要差异。
图3是示出旋转体的示例的示图。
参照图3,旋转体100可包括检测目标部110、旋转轴120和旋转施加部130。
例如,检测目标部110可以是设置在旋转体100的一端上的旋转构件,并且可具有圆柱形形状,但是构造不限于此。旋转施加部130是设置在旋转体100的另一端上的数字表冠,并且可具有圆形形状,但是构造不限于此。图案部200可设置在检测目标部110的侧表面上。
旋转轴120可设置在旋转施加部130与检测目标部110之间。
例如,当应用有用于感测旋转体的设备10的电子装置的用户使旋转施加部130在顺时针或逆时针方向上旋转时,连接到旋转施加部130的旋转轴120也可在相同方向上以相同速度一起旋转。因为整个旋转体100随着旋转轴120旋转而一起旋转,因此设置在旋转体100的一端上的检测目标部110也可在相同方向上以相同速度旋转。例如,如图3中所示,图案部200可具有围绕检测目标部110的单个带的形状,并且可包括具有不同宽度的第一图案部210和第二图案部220。例如,第一图案部210可具有大于平均宽度的宽度,并且第二图案部220可具有小于平均宽度的宽度。
图4是示出框架的结构的示例的示图。
参照图4,框架300可包括相对侧主体部310以及多个支腿321、322、323和324。
相对侧主体部310可包括两个主体部,两个主体部包括第一主体部310-1和第二主体部310-2。第一主体部310-1和第二主体部310-2可分别具有旋转体100可旋转地插入到其中的通孔311(311-1和311-2)。作为示例,旋转体100可以可旋转地插入到通孔311-1和311-2中。
多个支腿321、322、323和324可在插入到通孔311中的旋转体100的周围沿与旋转体100的轴向方向平行的方向设置在相对侧主体部310之间。例如,如图4中所示,多个支腿321、322、323和324可以以彼此间隔开的状态沿旋转体100的轴向方向设置在第一主体部310-1与第二主体部310-2之间。
图5是示出框架、基板、第一传感器和第二传感器以及保持部的布置的示例的示图。
参照图5,例如,基板500可利用柔性印刷电路板(FPCB)制成。基板500可牢固地附接到框架300的多个支腿321、322、323和324中的至少一个,例如,如图5中所示,基板500可牢固地附接到其中三个支腿321、322和323。
第一传感器410和第二传感器420可设置在框架300的多个支腿321、322、323和324之间。作为示例,第一传感器410可设置在基板500上,并且可设置在框架300的多个支腿321、322、323和324中的两个支腿321和322之间,以与设置在检测目标部110中的图案部200的一个区域相对,以便检测旋转体100的旋转。
第二传感器420可设置在基板500上,并且可设置在框架300的多个支腿321、322、323和324中的两个支腿322和323之间,以与设置在检测目标部110中的图案部200的另一区域相对,以便检测旋转体100的旋转。
作为示例,第一传感器410和第二传感器420可以是根据与图案部200的电磁相互作用检测电感变化的感应传感器。
图6A是示出基板和保持部的分离状态的示例的示图,并且图6B是示出基板和保持部的结合状态的示例的示图。
参照图6A,基板500可包括用于紧密地结合到保持部600的多个孔501和502,并且保持部600可包括设置在与基板500的多个孔501和502对应的位置的多个突出部611和612,以装配到多个孔501和502中。
参照图6B,保持部600的多个突出部611和612可装配并插入到基板500的多个孔501和502中,因此,基板500和保持部600可彼此牢固地结合。
例如,多个孔501和502以及多个突出部611和612中的每个可设置在不干扰第一传感器410和第二传感器420的位置。另外,由于图6A和图6B所示的布局仅是示例,因此多个孔501和502以及多个突出部611和612的位置不限于特定位置。
图7A是示出框架和保持部的分离状态的第一示例的示图,并且图7B是示出框架和保持部的结合状态的第一示例的示图。
图8A是示出框架和保持部的分离状态的第二示例的示图,并且图8B是示出框架和保持部的结合状态的第二示例的示图。
参照图7A,框架300的相对侧主体部310和320可包括多个突起331、312、313和314,所述多个突起331、312、313和314设置在与保持部600接触的位置以结合到保持部600。
保持部600可具有多个凹槽601、602、603和604,所述多个凹槽601、602、603和604设置在分别与框架300的相对侧主体部310和320的多个突起331、312、313和314对应的位置。
参照图7B,框架300的多个突起331、312、313、314可装配并插入到保持部600的多个凹槽601、602、603、604中,使得它们可彼此牢固地结合。
参照图8A,保持部600可包括设置在与框架300的相对侧主体部310接触的位置的多个突起621、622、623和624。
框架300的相对侧主体部310可包括设置在与保持部600接触的位置的多个贯通部301和302。
参照图8B,保持部600的突起621和622可装配并插入到框架300的一个相对侧主体部310(图4的第二主体部310-2)的贯通部301和302中,使得保持部600和框架300可彼此牢固地结合。此外,保持部600的突起623和624可装配并插入到框架300的另一相对侧主体部310(图4的第一主体部310-1)的贯通部(未示出)中。
图9是示出用于结合基板和保持部的框架的台阶的示例的示图。
参照图9,框架300可具有设置在结合到基板500的部分和与保持部600结合的部分之间的台阶S1和S2,如图9的虚线圆A1和A2中所示。
因此,通过台阶S1和S2,基板500和保持部600可在预定位置精确地结合到框架300。
图10A是示出具有结合环的旋转体和框架的分离状态的示例的示图,并且图10B是示出具有结合环的旋转体和框架的结合状态的示例的示图。
参照图10A和图10B,用于感测旋转体的设备10可包括结合环R1和R2,结合环R1和R2设置在框架300的相对侧主体部310中的每个的通孔311与旋转体100之间,使得旋转体100可旋转地且紧密地结合到框架300的通孔311。然而,根据本公开的实施例不限于此,也可仅在框架300的一个相对侧主体部310的通孔311与旋转体100之间设置结合环R1和R2中的相应的一个。
例如,结合环R1和R2可利用硅制成,并且可在框架300与旋转体100之间提供适当的摩擦和张力,以在旋转体100的旋转运动和平移运动期间保持适当的摩擦力。参照图10B,框架300和旋转体100可彼此紧密地结合以实现防水效果。
图11是示出第一传感器和第二传感器的示例的示图。
参照图11,第一传感器410和第二传感器420可以是例如作为印刷图案设置在基板500上的感测线圈,但是构造不限于此。
图12是示出旋转体、第一传感器和第二传感器的布置关系的示例的示图。
参照图12,基板500可包括弯曲部510,弯曲部510弯曲成使得第一传感器410和第二传感器420相对于旋转体100的中心部分具有预定角度。
例如,作为示例,设置在第一传感器410的感测表面与第二传感器420的感测表面之间的预定角度(图12的角度α)可变化并且可对应于90度。
可根据设置在检测目标部110中的图案部200的形状来确定角度α。例如,图案部200的与第一传感器410和第二传感器420的位置对应的形状可随着旋转体100旋转而改变。可根据形状的变化周期来确定由第一传感器410和第二传感器420的感测表面设置的角度α。
参照图3和图12,第一传感器410和第二传感器420可设置成使得其感测表面形成预定角度α。作为示例,图案部200的与第一传感器410的位置对应的形状和图案部200的与第二传感器420的位置对应的形状可彼此不同。
例如,当第一传感器410设置在与第一图案部210相邻的位置时,第二传感器420可设置在与第二图案部220相邻的位置。在这种情况下,当检测目标部110顺时针旋转时,与第一传感器410的位置对应的图案部200的宽度可改变,并且与第二传感器420的位置对应的图案部200的宽度也可改变。当与第一传感器410和第二传感器420相对的图案部200的宽度如上所述改变时,在第一传感器410和第二传感器420中检测到的电感也可改变。
参照图12,第一传感器410和第二传感器420中的每个可在旋转体100旋转时检测到电感变化信号。例如,电感变化信号中的每个可具有取决于第一传感器410和第二传感器420的布置关系的预定的相位差。
作为示例,由第一传感器410和第二传感器420检测到的电感变化信号可分别具有正弦函数形式和余弦函数形式。
这将参照图13A和图13B进一步描述。
图13A是当不采用保持部时第一传感器和第二传感器的阻抗变化信号的曲线图,并且图13B是当采用保持部时第一传感器和第二传感器的阻抗变化信号的曲线图。
在图13A中,线G11和G12分别表示第一传感器的具有正弦函数形式的阻抗变化信号和第二传感器的具有余弦函数形式的阻抗变化信号,并且线G13表示基于第一传感器的阻抗变化信号和第二传感器的阻抗变化信号的反正切(arc-tan)函数。
在图13B中,线G21和G22分别表示第一传感器的具有正弦波形式的阻抗变化信号和第二传感器的具有余弦波形式的阻抗变化信号,并且线G23表示基于第一传感器的阻抗变化信号和第二传感器的阻抗变化信号的反正切(arc-tan)函数。
如可从图13A的线G13和图13B的线G23看出的,在根据在此描述的各个示例的其中采用保持部的用于感测旋转体的设备中可改善线性度。
如上所述,在用于感测具有轴和数字表冠的旋转体的结构中,可提供用于保持传感器部以减小组装偏差的结构,以减小由结构的组装偏差引起的特性偏差。
虽然上面已经示出并描述了具体示例,但是在理解本公开内容之后将易于理解的是,在不脱离权利要求及其等同方案的精神和范围的情况下,可在这些示例中做出形式上和细节上的各种改变。在此描述的示例将仅被认为是描述性含义,而不是出于限制的目的。每个示例中的特征或方面的描述将被认为是可适用于其他示例中的类似的特征或方面。如果以不同的顺序执行描述的技术,和/或如果以不同的方式组合描述的系统、架构、装置或电路中的组件和/或用其他组件或它们的等同组件替换或补充描述的系统、架构、装置或电路中的组件,则可获得合适的结果。因此,本公开的范围不由具体实施方式限定,而是由权利要求及其等同方案来限定,并且在权利要求及其等同方案的范围内的所有变化将被解释为包括在本公开中。