时钟显示方法、装置、计算机设备、存储介质
文献发布时间:2023-06-29 06:30:04
技术领域
本申请涉及显示驱动IC(Integrated Circuit,集成电路)技术领域,特别是涉及一种时钟显示方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术
目前的平板显示装置中的时钟显示方法有两种,阿拉伯数字和模仿钟表表盘表针。阿拉伯数字时钟显示方法,相对简单,用local点阵式字库就可解决。模仿时分秒针及表盘的显示方法中,一般由系统处理器(AP/GPU)计算产生出模仿时分秒针及表盘的图像,再与背景图像作混合(blending)后装入GPU帧缓充中,然后通过高速口下发到显示器控制器(scalar/monitor controller)或显示驱动集成电路(driver IC)中,再显示到面板上。这种方法具有客户可任意定制时分秒针及表盘,但要通过高速口下发到显示驱动集成电路(display driver IC)中,需要不停地刷新本地帧缓存(local frame buffer),高速口功耗很大,导致在显示屏息屏(sleep in)状态时设备功耗很大。
传统技术中,图像的产生和复杂算法处理只能由功能强大的处理器或图形处理器(简称CPU/GPU)完成。但随着显示驱动集成电路的产业升级,越来越多的功能,需要且最好做到显示驱动集成电路中,这样也可以解放CPU/GPU,能够提升CPU/GPU的整体性能,增加更多的其他功能,如传感器中枢(sensor hub)、健康管理(health management)等。
目前模仿钟表表盘表针的时钟显示方式,设备CPU/GPU的运行负载较高,设备整体功耗较大。
发明内容
基于此,有必要针对上述技术问题,提供一种能够降低设备整体功耗的时钟显示方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
第一方面,本申请提供了一种时钟显示方法,应用于显示屏的显示驱动芯片,显示驱动芯片与视频处理器连接通信。所述方法包括:
根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;
根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;
获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;
获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
在其中一个实施例中,根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度,包括:
从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;
基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
在其中一个实施例中,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像,包括:
根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;
确定空表盘图像所在的表盘图层,将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
在其中一个实施例中,将各指针图层和表盘图层叠加,包括:
获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;
将各指针图层和表盘图层按照显示优先级的高低进行叠加。
在其中一个实施例中,方法还包括:
获取视频处理器下发的空表盘图像、至少一个指针图形和图层配置参数;
将至少一个指针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,以及将图层配置参数存储至本地的配置存储区域。
在其中一个实施例中,根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息,包括:
获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;
根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
在其中一个实施例中,将显示表盘数据传输至显示屏之前,还包括:
获取显示表盘数据对应的数据延迟;
根据视频同步信号和数据延迟,重新生成新的视频同步信号;
相应的,将显示表盘数据传输至显示屏,包括:
将新的视频同步信号和显示表盘数据传输至显示屏。
第二方面,本申请还提供了一种时钟显示装置。所述装置包括:
时间校准模块,用于根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;
角度计算模块,用于根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;
第一叠加模块,用于获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;
第二叠加模块,用于获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
第三方面,本申请还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;
根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;
获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;
获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
第四方面,本申请还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;
根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;
获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;
获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
第五方面,本申请还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;
根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;
获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;
获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
上述时钟显示方法、装置、计算机设备、存储介质和计算机程序产品,显示驱动芯片根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。显示驱动芯片可以独立实现模仿钟表表盘表针的时钟显示,大大降低对处理器和图形处理器的依赖,处理器和图形处理器仅需要传输时间信息和指针表盘图形给显示驱动芯片,生成表盘图像的数据处理过程由显示驱动芯片完成,能够降低处理器和图形处理器的运行负载,从而降低了设备的整体功耗。
附图说明
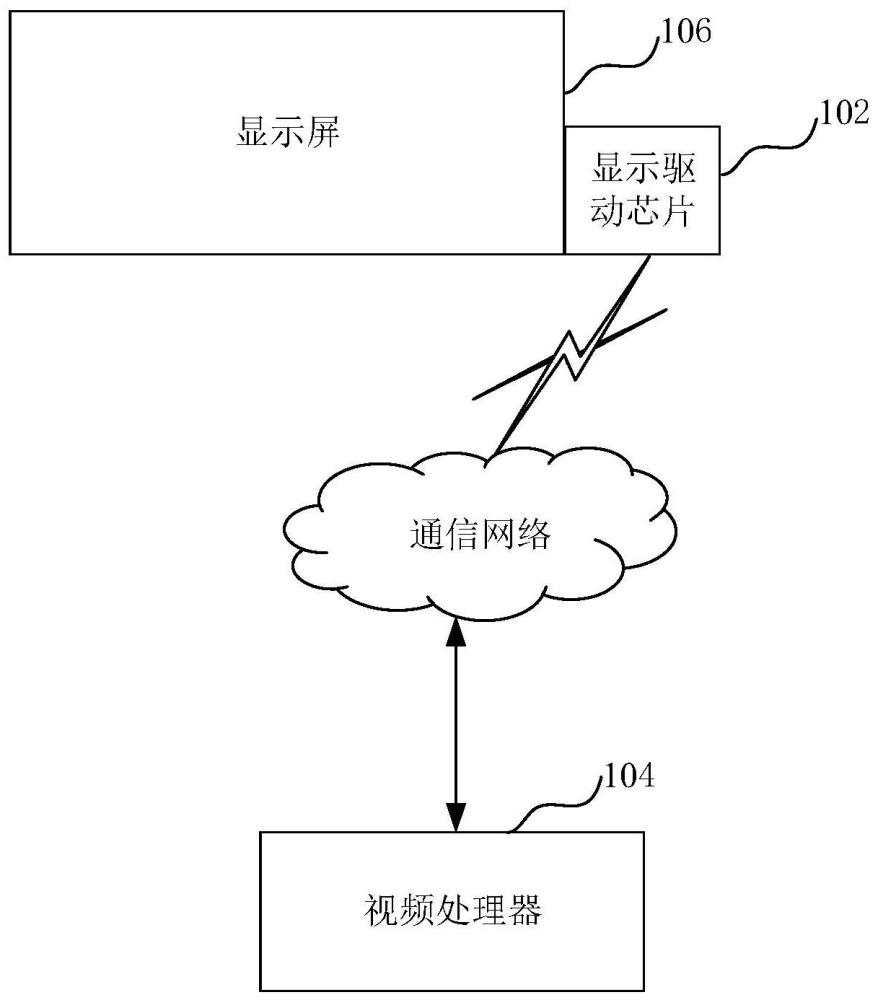
图1为一个实施例中时钟显示方法的应用环境图;
图2为一个实施例中时钟显示方法的流程示意图;
图3为一个实施例中显示驱动芯片的结构框架示意图;
图4为一个实施例中时钟显示装置的结构框图;
图5为一个实施例中计算机设备的内部结构图。
具体实施方式
为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
本申请实施例提供的时钟显示方法,可以应用于如图1所示的应用环境中。其中,终端上设有显示驱动芯片102、视频处理器104和显示屏106。显示驱动芯片102配置在显示屏106上,能够与视频处理器104通信。视频处理器104可以是CPU,也可以是GPU,还可以是CPU和GPU共同组成。终端可以但不限于是各种个人计算机、笔记本电脑、智能手机、平板电脑、物联网设备和便携式可穿戴设备,物联网设备可为智能音箱、智能电视、智能空调、智能车载设备等。便携式可穿戴设备可为智能手表、智能手环、头戴设备等。
在一个实施例中,如图2所示,提供了一种时钟显示方法,以该方法应用于图1中的显示驱动芯片102为例进行说明,包括以下步骤:
步骤202,根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息。
可选的,显示驱动芯片利用本地时钟获取当前的本地时刻信息,同时从视频处理器接收当前的处理器时刻信息作为标准时间,基于处理器时刻信息,对本地时刻信息进行校准,得到校准后的当前的时刻信息。
其中,显示驱动芯片的本地时钟可以基于本地晶振组成本地计时计数功能来实现。
步骤204,根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度。
其中,指针图形分为时针图形、分针图形和秒针图形。
可选的,显示驱动芯片每一次得到校准后的时刻信息后,读取本地存储的角度时刻关系表,时刻关系表中记录有时针图形旋转角度和不同时刻间的对应关系、分针图形旋转角度和不同时刻间的对应关系以及秒针图形旋转角度和不同时刻间的对应关系,根据当前校准后的时刻信息从角度时刻关系表中获取和当前时刻匹配的时针图形的旋转角度、分针图形的旋转角度和秒针图形的旋转角度。
步骤206,获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像。
其中,空表盘图像和指针图形可以在视频处理器中进行自定义配置,然后预先传输到显示驱动芯片中进行存储,当需要在显示屏上显示模仿钟表表盘表针的时钟时,显示驱动芯片直接从本地获取空表盘图像和指针图形。可配置的指针图形种类和相应的参数有:长棒针,针长宽,及针色彩;宝玑针,针长,针两短边宽,针上装饰环/点半径,及针色彩;针中心嵌轴环,大小环半径,环色彩等。
可选的,显示驱动芯片根据校准后的时刻信息对应的各指针图形的旋转角度,对每一个指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,根据旋转和抗锯齿处理后的各指针图形得到各指针图层;确定空表盘图像所在的表盘图层,将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
步骤208,获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
可选的,显示驱动芯片从视频处理器接收当前需要显示的表盘的背景图像,将表盘图像和背景图像进行叠加,得到当前时刻最终要进行显示的显示表盘数据,并将显示表盘数据传输至显示屏,显示屏一起显示表盘图形、时针图形、分针图形、秒针图形和背景图像,从而表示当前时刻。
上述时钟显示方法中,显示驱动芯片根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。显示驱动芯片可以独立实现模仿钟表表盘表针的时钟显示,大大降低对处理器和图形处理器的依赖,处理器和图形处理器仅需要传输时间信息和指针表盘图形给显示驱动芯片,生成表盘图像的数据处理过程由显示驱动芯片完成,能够降低处理器和图形处理器的运行负载,从而降低了设备的整体功耗。
在一个实施例中,根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度,包括:从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
其中,角度时刻关系表是预先编辑并存储在显示驱动芯片本地,时刻关系表中记录有时针图形旋转角度和不同时刻间的对应关系、分针图形旋转角度和不同时刻间的对应关系以及秒针图形旋转角度和不同时刻间的对应关系,旋转角度包括0~360度。例如,当前时刻为0点整或12点整时,时针图形对应的旋转角度为0度,分针图形对应的旋转角度为0度,秒针图形对应的旋转角度为0度;当前时刻为3点整时,时针图形对应的旋转角度为90度,分针图形对应的旋转角度为0度,秒针图形对应的旋转角度为0度;当前时刻为6点30分10秒时,时针图形对应的旋转角度为195度,分针图形对应的旋转角度为30度,秒针图形对应的旋转角度为60度。
具体的,显示驱动芯片从本地存储的角度时刻关系表中获取时针图形旋转角度和不同时刻间的对应关系、分针图形旋转角度和不同时刻间的对应关系以及秒针图形旋转角度和不同时刻间的对应关系。基于时针图形旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的时针图形的时针旋转角度。基于分针图形旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的分针图形的分针旋转角度。基于秒针图形旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的秒针图形的秒针旋转角度。
在一个可行的实施方式中,显示驱动芯片获取视频处理器下发的角度时刻关系表,将角度时刻关系表存储至本地的表格存储区域。
本实施例中,从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。能够由显示驱动芯片计算每一时刻各指针图像的旋转角度,大大降低对处理器和图形处理器的依赖,处理器和图形处理器仅需要传输时间信息和指针表盘图形给显示驱动芯片,能够降低处理器和图形处理器的运行负载,从而降低了设备的整体功耗。
在一个实施例中,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像,包括:根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加。将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
可选的,显示驱动芯片获取本地存储的时针图形、分针图形和秒针图形,并根据时针旋转角度,对时针图形进行旋转,并对旋转后的时针图形做抗锯齿处理,得到时针图层;根据分针旋转角度,对分针图形进行旋转,并对旋转后的分针图形做抗锯齿处理,得到分针图层;根据秒针旋转角度,对秒针图形进行旋转,并对旋转后的时针图形做抗锯齿处理,得到秒针图层。显示驱动芯片获取本地存储的空表盘图像,若本地存储的空表盘图像是压缩处理后的,则先对压缩空表盘图像进行解压缩处理,得到空表盘图像所在的表盘图层。然后显示驱动芯片根据本地存储的图层配置参数,确定时针图层、分针图层、秒针图层和表盘图层各自的显示优先级,表盘图层的显示优先级最低,显示优先级最高的图层覆盖显示优先级较低的图层,根据显示优先级将时针图层、分针图层、秒针图层和表盘图层叠加,得到表示当前时刻的表盘图像。旋转后的指针图形会有强烈的锯齿感,因此需要做抗锯齿处理,利用指针图形旋转后边缘距反向原图查表点的远近做混合系数与空表盘图像做抗锯齿混合,从而消除锯齿感。
在一个可行的实施方式中,图层配置参数还包括时针图层、分针图层、秒针图层和表盘图层各自的图层透明度。
本实施例中,根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加。将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。能够由显示驱动芯片对各指针图形分别进行旋转,并对旋转后的各指针图形和空表盘图像做抗锯齿混合处理,大大降低对处理器和图形处理器的依赖,处理器和图形处理器仅需要传输时间信息和指针表盘图形给显示驱动芯片,能够降低处理器和图形处理器的运行负载,从而降低了设备的整体功耗。
在一个实施例中,方法还包括:获取视频处理器下发的空表盘图像、至少一个指针图形和图层配置参数;将至少一个指针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,以及将图层配置参数存储至本地的配置存储区域。
可选的,显示驱动芯片上设有至少4个存储区域,预先从视频处理器获取空表盘图像、时针图形、分针图形、秒针图形、和图层配置参数和角度时刻关系表,时针图形、分针图形和秒针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,将图层配置参数存储至本地的配置存储区域,将角度时刻关系表存储至本地的表格存储区域。
本实施例中,处理器和图形处理器预先将空表盘图像、时针图形、分针图形、秒针图形、和图层配置参数和角度时刻关系表传输至显示驱动芯片,在显示驱动芯片生成模拟时钟的表盘图像过程中,处理器和图形处理器仅需要传输时间信息给显示驱动芯片,能够降低处理器和图形处理器的运行负载,从而降低了设备的整体功耗。
在一个实施例中,根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息,包括:获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
可选的,显示驱动芯片利用本地时钟获取当前的本地时刻信息,同时从视频处理器接收当前的处理器时刻信息,以及从显示屏接收视频同步信号,视频同步信号中携带有视频时钟,基于处理器时刻信息和视频时钟,对本地时刻信息进行校准,得到校准后的当前的时刻信息。
本实施例中,获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。显示驱动芯片基于处理器的标准时间和显示器的视频时钟对本地时间进行校准,能够得到较为精确的时刻信息。
在一个实施例中,将显示表盘数据传输至显示屏之前,还包括:获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号。相应的,将显示表盘数据传输至显示屏,包括:将新的视频同步信号和显示表盘数据传输至显示屏。
可选的,指针图形旋转并和空表盘图像叠加后,图像的数据延迟发生改变,因此需要重新生成新的视频同步信号。显示驱动芯片将新的视频同步信号和显示表盘数据同步传输至显示屏,显示屏一起显示表盘图形、时针图形、分针图形、秒针图形和背景图像,从而表示当前时刻。
本实施例中,获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号。相应的,将显示表盘数据传输至显示屏,包括:将新的视频同步信号和显示表盘数据传输至显示屏。处理器和图形处理器无需处理视频同步信号,能够降低处理器和图形处理器的运行负载,从而降低了设备的整体功耗。
在一个实施例中,一种时钟显示方法,应用于显示屏的显示驱动芯片,显示驱动芯片与视频处理器连接通信,包括:
获取视频处理器下发的空表盘图像、时针图形、分针图形、秒针图形、和图层配置参数和角度时刻关系表;将时针图形、分针图形和秒针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,将图层配置参数存储至本地的配置存储区域,将角度时刻关系表存储至本地的表格存储区域。
获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
获取本地存储的空表盘图像和至少一个指针图形,根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加,得到校准后的时刻信息对应的表盘图像。
获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据。
获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号。
将新的视频同步信号和显示表盘数据传输至显示屏。
在一个实施例中,一种时钟显示方法,以应用于如图3所示的显示驱动芯片为例,显示驱动芯片与视频处理器连接通信,显示驱动芯片包括:
显示驱动芯片获取视频处理器下发的空表盘图像、时针图形、分针图形、秒针图形、和图层配置参数和角度时刻关系表;将时针图形、分针图形和秒针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,将图层配置参数存储至本地的配置存储区域,将角度时刻关系表存储至本地的表格存储区域。
本地计时器获取显示驱动芯片本地时钟的本地时刻信息。时间校准器接收视频处理器下发的处理器时刻信息。同步计数器获取显示屏生成的视频同步信号。时间校准器根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
匹配器获取表格存储区域中的角度时刻关系表,基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
仲裁器从第一存储区域中获取指针图形的像素,各像素处理器根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形的像素分别进行旋转。解码器从第二存储区域中获取空表盘图像并进行解码解压缩等处理,混合器对旋转后的各指针图形和空表盘图像做抗锯齿处理,得到各指针图层和空表盘图层,混合器还从配置存储区域中获取图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加,得到校准后的时刻信息对应的表盘图像。选择器接收视频处理器下发的背景图像,通过像素处理器和混合器叠加表盘图像和背景图像,得到显示表盘数据。图3中的4个像素处理器每次同时并行读出4个像素做旋转处理,像素处理器的数量不限于4个,也可以配置更多数量的像素处理器,且每一个像素处理器都对应配置一个混合器,像素处理器的数量越多,并行处理指针图形像素的效率越高。
同步信号生成器获取显示表盘数据对应的数据延迟,根据从显示屏接收的视频同步信号和数据延迟,重新生成新的视频同步信号。
显示驱动芯片将新的视频同步信号和显示表盘数据传输至显示屏。
应该理解的是,虽然如上所述的各实施例所涉及的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,如上所述的各实施例所涉及的流程图中的至少一部分步骤可以包括多个步骤或者多个阶段,这些步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤中的步骤或者阶段的至少一部分轮流或者交替地执行。
基于同样的发明构思,本申请实施例还提供了一种用于实现上述所涉及的时钟显示方法的时钟显示装置。该装置所提供的解决问题的实现方案与上述方法中所记载的实现方案相似,故下面所提供的一个或多个时钟显示装置实施例中的具体限定可以参见上文中对于时钟显示方法的限定,在此不再赘述。
在一个实施例中,如图4所示,提供了一种时钟显示装置400,包括:时间校准模块401、角度计算模块402、第一叠加模块403和第二叠加模块404,其中:
时间校准模块401,用于根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息。
角度计算模块402,用于根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度。
第一叠加模块403,用于获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像。
第二叠加模块404,用于获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
在一个实施例中,角度计算模块402还用于从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
在一个实施例中,第一叠加模块403还用于根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
在一个实施例中,第一叠加模块403还用于获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加。
在一个实施例中,装置还包括:
获取模块,用于获取视频处理器下发的空表盘图像、至少一个指针图形和图层配置参数;将至少一个指针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,以及将图层配置参数存储至本地的配置存储区域。
在一个实施例中,时间校准模块401还用于获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
在一个实施例中,第二叠加模块404还用于获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号;将新的视频同步信号和显示表盘数据传输至显示屏。
上述时钟显示装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
在一个实施例中,提供了一种计算机设备,该计算机设备可以是终端,其内部结构图可以如图5所示。该计算机设备包括处理器、存储器、输入/输出接口、通信接口、显示单元和输入装置。其中,处理器、存储器和输入/输出接口通过系统总线连接,通信接口、显示单元和输入装置通过输入/输出接口连接到系统总线。其中,该计算机设备的处理器用于提供计算和控制能力。该计算机设备的存储器包括非易失性存储介质和内存储器。该非易失性存储介质存储有操作系统和计算机程序。该内存储器为非易失性存储介质中的操作系统和计算机程序的运行提供环境。该计算机设备的输入/输出接口用于处理器与外部设备之间交换信息。该计算机设备的通信接口用于与外部的终端进行有线或无线方式的通信,无线方式可通过WIFI、移动蜂窝网络、NFC(近场通信)或其他技术实现。该计算机程序被处理器执行时以实现一种时钟显示方法。该计算机设备的显示单元用于形成视觉可见的画面,可以是显示屏、投影装置或虚拟现实成像装置。显示屏可以是液晶显示屏或者电子墨水显示屏,该计算机设备的输入装置可以是显示屏上覆盖的触摸层,也可以是计算机设备外壳上设置的按键、轨迹球或触控板,还可以是外接的键盘、触控板或鼠标等。
本领域技术人员可以理解,图5中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
在一个实施例中,处理器执行计算机程序时还实现以下步骤:从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
在一个实施例中,处理器执行计算机程序时还实现以下步骤:根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加。
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取视频处理器下发的空表盘图像、至少一个指针图形和图层配置参数;将至少一个指针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,以及将图层配置参数存储至本地的配置存储区域。
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
在一个实施例中,处理器执行计算机程序时还实现以下步骤:获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号;将新的视频同步信号和显示表盘数据传输至显示屏。
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取视频处理器下发的空表盘图像、至少一个指针图形和图层配置参数;将至少一个指针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,以及将图层配置参数存储至本地的配置存储区域。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号;将新的视频同步信号和显示表盘数据传输至显示屏。
在一个实施例中,提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:根据本地时刻信息和处理器时刻信息进行时间校准,得到校准后的时刻信息;根据校准后的时刻信息,确定用于组成显示表盘的每一个指针图形的旋转角度;获取本地存储的空表盘图像和至少一个指针图形,根据每一个指针图形的旋转角度,叠加空表盘图像和至少一个指针图形,得到校准后的时刻信息对应的表盘图像;获取视频处理器下发的背景图像,叠加表盘图像和背景图像,得到显示表盘数据,将显示表盘数据传输至显示屏以显示校准后的时刻信息。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:从本地存储的角度时刻关系表中获取各指针图形的旋转角度和不同时刻间的对应关系;基于各指针图形的旋转角度和不同时刻间的对应关系,确定校准后的时刻信息对应的各指针图形的旋转角度。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:根据校准后的时刻信息对应的各指针图形的旋转角度,对各指针图形分别进行旋转,并对旋转后的各指针图形做抗锯齿处理,得到各指针图层;确定空表盘图像所在的表盘图层,将各指针图层和表盘图层叠加,得到校准后的时刻信息对应的表盘图像。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取本地存储的图层配置参数,根据图层配置参数分别确定各指针图层和表盘图层的显示优先级;将各指针图层和表盘图层按照显示优先级的高低进行叠加。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取视频处理器下发的空表盘图像、至少一个指针图形和图层配置参数;将至少一个指针图形存储至本地的第一存储区域,将空表盘图像存储至本地的第二存储区域,以及将图层配置参数存储至本地的配置存储区域。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取显示驱动芯片的本地时刻信息,接收视频处理器下发的处理器时刻信息,以及获取显示屏生成的视频同步信号;根据本地时刻信息、处理器时刻信息和视频同步信号进行时间校准,得到校准后的时刻信息。
在一个实施例中,计算机程序被处理器执行时还实现以下步骤:获取显示表盘数据对应的数据延迟;根据视频同步信号和数据延迟,重新生成新的视频同步信号;将新的视频同步信号和显示表盘数据传输至显示屏。
需要说明的是,本申请所涉及的用户信息(包括但不限于用户设备信息、用户个人信息等)和数据(包括但不限于用于分析的数据、存储的数据、展示的数据等),均为经用户授权或者经过各方充分授权的信息和数据,且相关数据的收集、使用和处理需要遵守相关国家和地区的相关法律法规和标准。
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、数据库或其它介质的任何引用,均可包括非易失性和易失性存储器中的至少一种。非易失性存储器可包括只读存储器(Read-OnlyMemory,ROM)、磁带、软盘、闪存、光存储器、高密度嵌入式非易失性存储器、阻变存储器(ReRAM)、磁变存储器(Magnetoresistive Random Access Memory,MRAM)、铁电存储器(Ferroelectric Random Access Memory,FRAM)、相变存储器(Phase Change Memory,PCM)、石墨烯存储器等。易失性存储器可包括随机存取存储器(Random Access Memory,RAM)或外部高速缓冲存储器等。作为说明而非局限,RAM可以是多种形式,比如静态随机存取存储器(Static Random Access Memory,SRAM)或动态随机存取存储器(Dynamic RandomAccess Memory,DRAM)等。本申请所提供的各实施例中所涉及的数据库可包括关系型数据库和非关系型数据库中至少一种。非关系型数据库可包括基于区块链的分布式数据库等,不限于此。本申请所提供的各实施例中所涉及的处理器可为通用处理器、中央处理器、图形处理器、数字信号处理器、可编程逻辑器、基于量子计算的数据处理逻辑器等,不限于此。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请的保护范围应以所附权利要求为准。