自动泊车方法、系统及可读存储介质
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及泊车技术领域,尤其涉及一种自动泊车方法、系统及可读存储介质。
背景技术
随着车辆的智能化发展,越来越多的车辆开始提供自动泊车系统,以帮助泊车经验不足的驾驶员能够方便地泊车。但是,目前的自动泊车系统还存在着一些问题,使得驾驶员在使用自动泊车系统进行泊车时,存在安全隐患,例如,在泊车时,车内还有其他同乘人员未下车,在自动泊车时,可能由于泊车相关设备故障而导致车辆失控,使得未下车的同乘人员受伤的问题。
由此可知,目前车辆的自动泊车功能在使用时存在不够安全的问题。
发明内容
本发明的主要目的在于提供一种自动泊车方法、系统及可读存储介质,旨在解决现有的车辆的自动泊车功能在使用时存在不够安全的技术问题。
为实现上述目的,本发明提供一种自动泊车方法,所述自动泊车方法包括步骤:
响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定所述车内人员情况信息是否满足预设泊车条件;
若满足,则接管对车辆的控制功能;
获取预设泊车路线,并基于所述预设泊车路线和所述控制功能,对所述车辆进行泊车。
优选地,所述确定所述车内人员情况信息是否满足预设泊车条件,之后还包括:
若所述车内人员情况信息不满足预设泊车条件,则输出对应的提示信息至第一设备。
优选地,所述自动泊车方法还包括:生成所述预设泊车路线的过程,具体包括:
响应于辅助泊车指令,确定意向停车位置;
获取所述意向停车位置对应的周边环境信息和预设车辆信息,并基于所述周边环境信息和所述预设车辆信息,生成预设泊车路线。
优选地,所述自动泊车方法还包括:
持续更新所述周边环境信息;
若更新后的周边环境信息满足预设停止泊车条件,则停止所述泊车。
优选地,所述车辆包括执行系统,所述执行系统包括一个或多个,所述自动泊车方法还包括:
检测各执行系统的工作状态;
若一个或多个所述执行系统的工作状态存在异常,则停止所述泊车。
优选地,所述自动泊车方法还包括:
响应于第二设备的泊车停止指令,停止所述泊车。
优选地,所述自动泊车方法还包括:
反馈泊车成功信息至第一设备,以使所述第一设备输出所述泊车成功信息对应的提醒信息。
此外,为实现上述目的,本发明还提供一种自动泊车系统,所述自动泊车系统包括高级驾驶辅助系统、用户连接单元和第一设备,所述第一设备与所述高级驾驶辅助系统之间通过所述用户连接单元进行交互。
优选地,所述自动泊车系统还包括车身控制器,用于接收第二设备发送的控制指令。
此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有自动泊车程序,所述自动泊车程序被处理器执行时实现如上所述的自动泊车方法的步骤。
本发明通过响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定所述车内人员情况信息是否满足预设泊车条件;若满足,则接管对车辆的控制功能;获取预设泊车路线,并基于所述预设泊车路线和所述控制功能,对所述车辆进行泊车。实现了在响应第一设备发送的开始泊车指令之后,自动获取车内人员情况信息,并在车内人员情况信息满足预设泊车条件时,才接管对车辆的控制功能以及获取预设泊车路线以进行泊车。避免了在泊车过程中,对仍然留在车内的人员造成伤害,进而提高了车辆的自动泊车功能的使用安全性。
附图说明
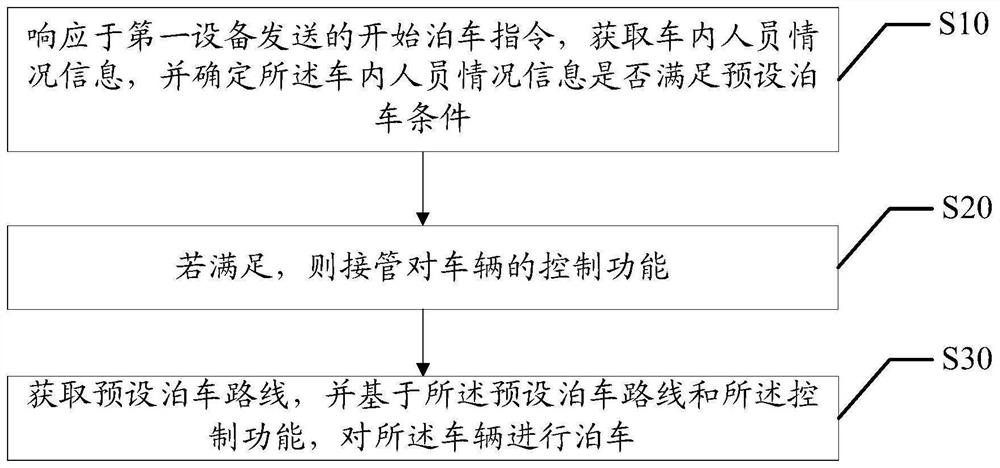
图1是本发明自动泊车方法第一实施例的流程示意图;
图2是本发明自动泊车系统的组成示意图。
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
本发明提供一种自动泊车方法,参照图1,图1为本发明自动泊车方法第一实施例的流程示意图。
本发明实施例提供了自动泊车方法的实施例,需要说明的是,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。为了便于描述,以下省略执行主体描述自动泊车方法的各个步骤。自动泊车方法包括:
步骤S10,响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定所述车内人员情况信息是否满足预设泊车条件。
具体地,响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定该车内人员情况信息是否满足预设泊车条件。其中,车内人员情况信息包括两种情况,即车内有人和车内无人,对于车内有人的情况,其可能的情况为父母将幼儿遗落在车内,或者是行动不便的老人由于动作慢而被遗落在车内,对于这两种情况而言,均会由于与其他人之间的沟通障碍而被驾驶员忽略,即驾驶员容易在车内还有老人或幼儿时开始泊车。为避免上述情况的发送,需要设置检测机制,以在接收到开始泊车指令后,检测车内是否还有人员未下车;对于车内无人的情况则为满足预设泊车条件。
需要说明的是,车内人员情况信息可通过车内设备或部件获取,例如,通过车内摄像头获取,或通过温度传感器获取。
需要说明的是,第一设备可以是移动终端设备,如手机;也可以是智能可穿戴设备,如智能手表。驾驶员可在第一终端打开相应的APP(Application,应用程序),并在该APP相应的界面触发“一键泊车”的“开始泊车”操作,以使车辆开始泊车。
需要说明的是,第一设备与车辆之间可通过蓝牙进行通信。
步骤S20,若满足,则接管对车辆的控制功能。
具体地,若车内人员情况信息满足预设泊车条件,则接管对车辆的控制功能。
需要说明的是,控制功能包括转向功能、制动功能、驻车制动功能、车身控制功能等用于能够改变车辆或车辆内部件的运动状态的功能。
步骤S30,获取预设泊车路线,并基于所述预设泊车路线和所述控制功能,对所述车辆进行泊车。
具体地,获取预设泊车路线,并基于该预设泊车路线和控制功能,对车辆进行泊车。需要说明的是,预设泊车路线为车辆由当前位置运动到目标泊入位置的轨迹,根据该预设泊车路线,即可通过控制功能对车辆进行准确控制以完成泊车。
此外,在泊车完成后,自动为车辆熄火以及下电锁车,以避免驾驶员在泊车完成后还需要通过车辆电子钥匙来为车辆熄火以及下电锁车,提高了自动泊车功能的使用便捷性。
进一步地,所述确定所述车内人员情况信息是否满足预设泊车条件,之后还包括:
步骤S40,若所述车内人员情况信息不满足预设泊车条件,则输出对应的提示信息至第一设备。
具体地,若车内人员情况信息不满足预设泊车条件,则输出对应的提示信息至第一设备,在车内还有人员时,不获取控制功能,并向第一设备输出提示信息,如文字提示驾驶员车内还有小孩,或者获取控制功能但不进行泊车,而是通过车辆自身提醒驾驶员,例如自动打开双闪、通过车载音响设备输出相关语音提示信息等。
进一步地,生成所述预设泊车路线的过程,包括:
步骤S50,响应于辅助泊车指令,确定意向停车位置。
具体地,响应于辅助泊车指令,确定意向停车位置。
需要说明的是,驾驶员在存在停车需求时,可通过辅助泊车功能寻找停车位置,其中,该辅助泊车功能对应的功能按钮可设置于车载终端、第一设备,或为车辆上的实体按键等,该停车位置可存在一个或多个,在停车位置为一个时,直接将该停车位置作为意向停车位置,在该停车位置存在多个时,通过车载终端或第一设备为驾驶员列出各停车位置,以供驾驶员选择其中之一作为意向停车位置。
需要说明的是,为进一步方便驾驶员进行停车位置的选择,可对应标明各停车位置的相关信息,例如,该停车位置对应的最近的停车场出口(方便用户离开以及取车,如靠近驾驶员的家的停车场出口),该停车位置旁边是否停有其他车辆(在驾驶员取车(不方便使用自动泊出车位的功能)时方便其开门驶出),以使驾驶员根据该相关信息选择最合适的停车位置作为意向停车位置。
步骤S60,获取所述意向停车位置对应的周边环境信息和预设车辆信息,并基于所述周边环境信息和所述预设车辆信息,生成预设泊车路线。
具体地,获取意向停车位置对应的周边环境信息和预设车辆信息,并基于该周边环境信息和该预设车辆信息,生成预设泊车路线。
需要说明的是,意向停车位置对应的周边环境信息包括静态的和动态的,例如,静态的周边环境信息可包括停在其他停车位置的车辆、建筑障碍物(如柱子、墙角等)等;动态的周边环境信息可包括处于移动状态的行人、处于移动状态的车辆等。对于静态的周边环境信息,在生成预设泊车路线时,只需要绕过即可,而对于动态的周边环境信息,由于处于移动状态,其具有一定的移动速度,在生成预设泊车路线时,需要结合动态的周边环境信息的移动速度来设置预设泊车路线,特别是行人,由于其移动方向以及移动速度存在不稳定性,易在泊车过程中产生阻碍。优选地,对于动态的周边环境信息,可以实时监测其对应的移动物体的运动状态,以分析其是否会在泊车过程中成为车辆的预设泊车路线的障碍。
例如,车辆在生成预设泊车路线时,预计泊车过程中会对其他车辆的移动产生阻碍,且周边存在距离本车辆50m且移动速度为5m/s的障碍车辆,假设该障碍车辆为匀速运动,其移动至本车辆当前位置的时间10s,而本车辆预计泊车完成时间为25s,此时,完成泊车时间远大于该障碍车辆移动至本车辆当前位置的时间,可将之作为一个生成因素考虑进生成预设泊车路线的过程,得到的预设泊车路线为原地等待10s后才开始泊车。可选地,通过第一设备提醒驾驶员该预设泊车路线的生成原因,可选地,提醒方式包括语音提醒、文字提醒、震动提醒等,例如,文字提醒为“前方有车辆驶来”。
需要说明的是,预设车辆信息为车辆当前会对生成预设泊车路线产生影响的信息,例如,车辆的行进方向、车辆的转向角度等。
进一步地,所述自动泊车方法还包括:
步骤A10,持续更新所述周边环境信息。
具体地,泊车过程中,持续更新周边环境信息。需要说明的是,泊车时,特别地,在户外泊车时,外界环境复杂多变,若只根据预设泊车路线进行泊车,无论是静态的周边环境信息还是动态的周边环境信息只根据生成预设泊车路线时的周边环境信息来作为泊车过程中的周边环境信息是不合理的,除生成预设泊车路线时的周边环境信息之外,还需要实时持续更新该周边环境信息,以防止泊车过程中新增对泊车会产生影响的障碍没有被更新到预设泊车路线中。从而通过持续更新周边环境信息,以防止本车辆与该更新后的周边环境信息发生事故,进而提高了泊车过程中的安全性。
例如,泊车过程中,有其他车辆高速驶来,本车辆应在发现该其他车辆时及时确定其速度以及和本车辆之间的距离,并确定具体地应对方案,例如,停止泊车以为该其他车辆让道。
步骤A20,若更新后的周边环境信息满足预设停止泊车条件,则停止所述泊车。
具体地,若更新后的周边环境信息满足预设停止泊车条件,则停止泊车。具体地,预设停止泊车条件即更新后的周边环境信息会成为泊车过程中的障碍。
进一步地,所述车辆包括执行系统,所述执行系统包括一个或多个,所述自动泊车方法还包括:
步骤A30,检测各执行系统的工作状态。
具体地,在泊车前以及泊车过程中,为确保车辆安全以及泊车过程中的安全,实时检测各执行系统的工作状态,以确定各执行系统是否存在异常。
需要说明的是,各执行系统为上述控制功能对应的系统,用于执行基于控制功能下发的控制指令。
步骤A40,若一个或多个所述执行系统的工作状态存在异常,则停止所述泊车。
具体地,若一个或多个执行系统的工作状态存在异常(如执行系统无法执行控制指令对应的操作或执行系统能够执行控制指令对应的操作,但该操作为异常操作),说明继续泊车存在发生事故的可能,例如,泊车过程中,与其他车辆发生碰撞,因此,需要停止泊车。
进一步地,所述自动泊车方法还包括:
步骤A50,响应于第二设备的泊车停止指令,停止所述泊车。
具体地,响应于第二设备的泊车停止指令,停止泊车。
需要说明的是,第二设备与第一设备不为同一设备,由于第一设备并非专用于泊车的设备,例如,手机的功能非常繁杂,在开启泊车相关APP时,可能同时运行着大量的其他APP,容易理解的是,手机在运行时,会由于硬件或软件的原因,系统处于死机状态,导致泊车过程中,驾驶员无法通过手机发出控制指令(如停止泊车),这会存在一定的危险性,例如,由于各种原因导致车辆泊车过程中出现错误动作(如应该转向的时候未转向)时,需要停止泊车以停止车辆的运动,此时,由于手机无法发出控制指令,车辆可能会与其他障碍物(如柱子)发生碰撞事故。
因此,需要针对驾驶员无法通过手机发出控制指令的情况,设置一个用于应急的,可以发出控制指令的设备,例如,车辆电子钥匙,驾驶员在手机无法发出控制指令时,可通过车辆电子钥匙发出控制指令,例如,按压车辆电子钥匙上的任意按键。
进一步地,所述自动泊车方法还包括:
步骤A60,反馈泊车成功信息至第一设备,以使所述第一设备输出所述泊车成功信息对应的提醒信息。
具体地,反馈泊车成功信息至第一设备,以使该第一设备输出该泊车成功信息对应的提醒信息。
需要说明的是,该提醒信息包括以下至少一种:语音提醒信息、文字提醒信息、震动提醒信息。例如,文字提醒信息的内容为“泊车成功”。
本实施例通过响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定所述车内人员情况信息是否满足预设泊车条件;若满足,则接管对车辆的控制功能;获取预设泊车路线,并基于所述预设泊车路线和所述控制功能,对所述车辆进行泊车。实现了在响应第一设备发送的开始泊车指令之后,自动获取车内人员情况信息,并在车内人员情况信息满足预设泊车条件时,才接管对车辆的控制功能以及获取预设泊车路线以进行泊车。避免了在泊车过程中,对仍然留在车内的人员造成伤害,进而提高了车辆的自动泊车功能的使用安全性。
此外,参照图2,本发明实施例还提出一种自动泊车系统,所述自动泊车系统包括高级驾驶辅助系统、用户连接单元和第一设备,所述第一设备与所述高级驾驶辅助系统之间通过所述用户连接单元进行交互。
具体地,驾驶员通过第一设备上的APP与本车辆的UCU(User Connect Unit,用户连接单元)建立连接,连接方式可为通过蓝牙模块进行连接。UCU接收到APP下发的指令(如驾驶员在APP上选择进入“一键泊入功能”)后,UCU将该指令转换为CAN(Controller AreaNetwork,控制器局域网络)通讯信号发送给自动泊车系统的决策系统——泊车控制器(ADAS(Advanced Driving Assistance System,高级驾驶辅助系统)),以实现第一设备与ADAS之间的交互,并使该ADAS进入泊车准备状态。
具体地,自动泊车系统还包括环境感知系统,该环境感知系统包括一个或多个超声波雷达以及对应的超声波雷达控制器和一个或多个环视摄像头,为确保能做到360度环视,应至少在本车辆的车身四周设置四个环视摄像头,各环视摄像头负责车身四周90度的区域,优选地,各环视摄像头设置于车身各转角处,以实现无死角360度环视。其中,环视摄像头通过视频线将数据传输给ADAS,超声波雷达与超声波雷达控制器之间通过低压线束交互,超声波雷达控制器与ADAS之间通过CAN交互。
需要说明的是,进入泊车准备状态,ADAS需要通过环境感知系统对意向停车位置进行锁定以及采集周边环境信息,并结合此时的车辆信息规划好预设泊车路线。
进一步地,所述自动泊车系统还包括车身控制器,用于接收第二设备发送的控制指令。
具体地,自动泊车系统还包括用于接收第二设备发送的控制指令的BCM(BodyControlled Model,车身控制器),该BCM可将该控制指令转发至ADAS。
需要说明的是,车身控制器属于自动泊车系统的执行系统,该执行系统还包括电子制动系统、电子助力转向系统、整车控制器、电子驻车制动系统和车身电子稳定控制系统,该执行系统用于发送对应的状态信息或驾驶员的控制指令至ADAS,以供ADAS作出相应决策,以及接受ADAS发送的控制指令,并执行该控制指令从而实现对本车辆的控制。其中,各执行系统通过CAN与ADAS之间实现交互,UCU还通过CAN向BCM传输数据。
此外,自动泊车系统还包括交互系统,该交互系统除UCU外,还包括仪表、车载终端和车辆电子钥匙,用于显示泊车相关信息(如停车位置信息)、泊车状态、向驾驶员反馈状态及将驾驶员的控制操作以指令形式发送至ADAS。例如,驾驶员在泊车过程中需要紧急停止泊车,可通过车辆电子钥匙向车身控制器发出控制信号,并由该车身控制器转发该控制信号至ADAS,ADAS基于该控制信号向执行系统输出相应的控制信号,以达到停止泊车的目的。其中,ADAS通过视频线或CAN向仪表传输数据(如车速信息),UCU、车载终端通过CAN与ADAS实现交互。
此外,本发明ADAS被编程以实现如本发明所述的自动泊车方法的步骤。
此外,本发明实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有自动泊车程序,所述自动泊车程序被处理器执行时实现如上所述的自动泊车方法的步骤。
本发明计算机可读存储介质具体实施方式与上述自动泊车方法各实施例基本相同,在此不再赘述。
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如ROM/RAM、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,设备,或者网络设备等)执行本发明各个实施例所述的方法。
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 自动泊车方法、自动泊车装置与系统及可读存储介质
- 自动泊车控制方法、装置、系统及可读存储介质