编码设备、编码方法、解码设备、解码方法、发送系统、接收设备和程序
文献发布时间:2023-06-19 10:08:35
技术领域
本技术涉及编码设备及其方法、解码设备及其方法、发送系统、接收设备和程序,并且尤其涉及与用于生成触觉刺激的触觉信号的编码、解码和发送相关的技术领域。
背景技术
近年来,使用与人的皮肤接触的触觉呈现装置来施加触觉刺激的应用已经在各种场景中使用。在此处,“触觉呈现”是指生成触觉刺激。
例如,在诸如智能电话的配备触摸面板的移动终端中,通过在面板的触摸操作时通过振动面板(或壳体)对手指施加触觉刺激,创建按钮的伪触摸感。
在音乐收听时,一些设备通过将触觉呈现装置结合到耳机壳体中,并与音乐再现同步施加触觉刺激来增强重低音。
在计算机游戏和虚拟现实(VR)领域,一些设备通过根据用户的操作由安装在控制器中的触觉呈现装置根据场景交互式地施加触觉刺激来增强用户的沉浸感。
在娱乐设施中,一些设备通过根据场景使用安装在电影院、娱乐公园等的座位上的触觉呈现装置来施加触觉刺激来增强游客的真实感。
此外,在研究和开发阶段,在远程控制机器人等时,一些设备通过将由机器人或被操作的目标物体接收的振动反馈到操作者所持有的控制器,并使操作者直观地检测机器人或目标物体的周围情况来帮助危险预测(例如,灾难援助机器人
此外,在医疗领域中,已经进行了通过将在操作手术机器人时当内窥镜的镊子接触器官时的感觉(硬度)反馈给操作者来增强手术精度的研究(例如,手术支持机器人“达芬奇手术系统”
另一方面,作为触觉呈现装置,经常使用偏心旋转质量(ERM)电机、线性谐振致动器(LRA)等,并且许多这种装置被假设为具有用于人类触觉灵敏度的高频(大约几百Hz)的谐振频率的装置(例如,参考下面描述的专利文献1)。
此外,存在一种通过准备多个触觉呈现装置、将触觉呈现装置附接到整个身体并施加触觉刺激来进一步增强真实感的示例方法(例如,联觉套装(Synesthesia Suit)
引用列表
专利文献
专利文献1:日本专利申请公开第2016-202486号
发明内容
本发明要解决的问题
在此处,在如上所述准备多个触觉呈现装置并将触觉刺激施加到人体的多个部分的情况下,针对每个区域准备指示触觉刺激模式的信号(即对应于多个通道的触觉信号)并进行处理。此时,为了增强真实感,期望增加施加触觉刺激的区域的数量,但是从系统配置的方面来看,触觉再现所需的数据量的不必要的增加是不期望的。
此外,在发送用于触觉再现的触觉信号时,并且尤其是在执行无线发送时,发送路径上的干扰可能发生编码数据的丢失。
在发生数据丢失的情况下,接收侧向发送侧发送数据重发请求,并且引起数据发送延迟。这种数据发送延迟导致触觉的再现性下降。具体地,例如,触觉再现被假设与诸如声音或视频的其他感觉相关的内容(在下文中,描述为“感觉内容”)同步地再现,但是在出现触觉信号的上述发送延迟的情况下,触觉刺激未能在期望的定时施加,并且未能与其他感觉内容实现同步。这可能导致触觉的再现性下降。
鉴于上述情况设计了本技术,并且本技术的第一目的是通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,本技术的第二目的是通过抑制由发送路径上的数据丢失引起的触觉信号的发送延迟来防止由发送延迟引起的触觉再现性下降。
问题的解决方案
根据本技术的编码设备包括编码单元,该编码单元被配置为在人体的不同区域之间使用不同的数据格式对触觉信号进行编码。
因此,例如,考虑到人体区域之间的触觉特性的差异,可以通过使用人体区域之间的触觉灵敏度的差异来减少具有低触觉灵敏度的区域的触觉信号的数据分布等来执行触觉信号的数据量减少。
根据本技术的编码方法是在人体的不同区域之间使用不同的数据格式对触觉信号进行编码的编码方法。
而且,通过这样的编码方法,可以获得与根据本技术的上述编码设备的效果类似的效果。
根据本技术的第一程序是用于使信息处理设备实现在人体的不同区域之间使用不同的数据格式对触觉信号进行编码的编码功能的程序。
通过这样的第一程序,实现了根据本技术的上述编码设备。
此外,根据本技术的解码设备包括解码单元,该解码单元被配置为对在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码。
因此,例如,考虑到人体区域之间的触觉特性的差异,可以通过使用人体区域之间的触觉灵敏度的差异来减少具有低触觉灵敏度的区域的触觉信号的数据分布等来执行触觉信号的数据量减少。
在根据本技术的上述解码设备中,期望解码单元对在具有人体的不同触觉特性的区域之间具有不同的数据格式的触觉信号进行解码。
因此,可以使用人体区域之间的触觉灵敏度等的差异来执行触觉信号的数据量减少。
在根据本技术的上述解码设备中,期望解码单元对触觉信号进行解码,该触觉信号具有以根据触觉灵敏度改变对区域的位分布的方式定义的相应区域的数据格式。
因此,可以考虑区域之间的触觉特性的差异来执行触觉信号的数据量减少。
在根据本技术的上述解码设备中,期望解码单元对在不同区域之间具有不同量化位长度的触觉信号进行解码。
因此,可以通过缩短针对具有低触觉灵敏度(对触觉刺激的振幅的低灵敏度)的区域的量化位长度来实现触觉信号的数据量减少。
在根据本技术的上述解码设备中,期望解码单元对在不同区域之间具有不同采样频率的触觉信号进行解码。
因此,可以通过降低针对具有低触觉灵敏度(对触觉刺激的频率的低灵敏度)的区域的采样频率来实现触觉信号的数据量减少。
在根据本技术的上述解码设备中,期望解码单元包括格式转换单元,该格式转换单元被配置为输入在不同区域之间量化位长度和采样频率中的至少一个不同的触觉信号,并且转换相应区域的触觉信号中的至少任一个触觉信号的量化位长度和采样频率中的至少任一个。
因此,消除了根据区域之间的量化位长度或采样频率的差异来提供执行触觉信号的D/A转换的多种类型的D/A转换器的需要。
在根据本技术的上述解码设备中,期望解码单元输入添加有指示区域的类型的索引信息的触觉信号,并且基于该索引信息对相应区域的触觉信号执行解码。
因此,增强触觉信号区域的识别的容易性和准确性。
此外,根据本技术的解码方法是对在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码的解码方法。
而且,通过这样的解码方法,可以获得与根据本技术的上述解码设备的效果类似的效果。
此外,根据本技术的第二程序是用于使信息处理设备实现在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码的解码功能的程序。
通过这样的第二程序,实现了根据本技术的上述解码设备。
此外,根据本技术的发送系统包括:发送设备,该发送设备包括:编码单元,其被配置为通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据;以及发送单元,其被配置为发送编码数据;以及接收设备,该接收设备包括:接收单元,其被配置为接收由发送单元发送的编码数据;以及解码单元,其被配置为根据优先级顺序对由接收单元接收的编码数据执行解码。
如上所述,例如,通过以对应于优先级顺序的排列发送相应区域的触觉信号,可以使要优先化的区域(诸如,具有高触觉灵敏度的区域)的触觉信号的数据丢失不太可能发生,并且根据优先级顺序进一步对要以这种方式发送的触觉信号进行解码,即使发生发送路径上的数据丢失,在要优先化的区域的触觉信号中不发生数据丢失,仅接收到的要优先化的区域的触觉信号可以被视为触觉再现的目标。
此外,根据本技术的接收设备包括:接收单元,其被配置为从发送设备接收编码数据,该发送设备被配置为通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据;以及解码单元,其被配置为根据优先级顺序对由接收单元接收的编码数据执行解码。
例如,通过发送设备以对应于优先级顺序的排列发送相应区域的触觉信号,可以使要优先化的区域(诸如,具有高触觉灵敏度的区域)的触觉信号的数据丢失不太可能发生,并且根据优先级顺序进一步对要以这种方式发送的触觉信号进行解码,即使发生发送路径上的数据丢失,在要优先化的区域的触觉信号中不发生数据丢失,仅接收到的要优先化的区域的触觉信号可以被视为触觉再现的目标。
在根据本技术的上述接收设备中,期望相应区域的触觉信号是具有人体的不同触觉特性的相应区域的触觉信号。
因此,可以对具有不同触觉特性的每个区域执行触觉再现。
在根据本技术的上述接收设备中,期望发送设备从具有较高优先级顺序的区域发送按顺序排列的触觉信号,并且解码单元在至少接收到除了具有最低优先级顺序的区域之外的具有最高优先级顺序的区域的触觉信号时,将确认返回发送设备。
因此,具有高优先级顺序的区域的触觉信号变得等同于使用短分组发送信号。
在根据本技术的上述接收设备中,期望优先级顺序是基于触觉灵敏度的高度的优先级顺序。
因此,对于从对触觉刺激的灵敏度方面容易感知触觉刺激的区域,可以使触觉信号的数据丢失不太可能发生。
在根据本技术的上述接收设备中,期望发送设备在对具有高优先级顺序的区域给予冗余之后发送触觉信号,并且解码单元在接收到被给予冗余的区域的触觉信号中的至少一个触觉信号时,将确认返回发送设备。
因此,可以使触觉信号的数据丢失不太可能发生。
此外,根据本技术的解码方法是根据优先级顺序对从发送设备接收的编码数据执行解码的解码方法,该发送设备被配置为通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据。
而且,通过这样的解码方法,可以获得与根据本技术的上述接收设备的效果类似的效果。
此外,根据本技术的第三程序是用于使信息处理设备实现根据优先级顺序对从发送设备接收的编码数据执行解码的功能的程序,该发送设备被配置为通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据。
通过这样的第三程序,实现了根据本技术的上述接收设备。
本发明的效果
根据本技术,首先,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,根据本技术,其次,通过使由发送路径上的数据丢失引起的触觉信号的发送延迟不太可能发生,可以防止由发送延迟引起的触觉再现性下降。
注意,此处描述的效果不必受到限制,并且可以是本公开中描述的任何效果。
附图说明
[图1]是示出包括根据本技术的第一实施例的解码设备的触觉再现系统的配置示例的示图。
[图2]是用于描述根据第一实施例的编码设备的内部配置示例的示图。
[图3]是用于描述根据第一实施例的解码设备的内部配置示例的示图。
[图4]是振动检测阈值曲线的说明图。
[图5]是示出每个接受器的神经放电分布的示例的示图。
[图6]是每个接受器的振动检测阈值曲线的说明图。
[图7]是例示以触觉信号的数字化为目标的振幅范围和频率范围的示图。
[图8]是示出触觉呈现设备对人体的每个区域的附接示例和每个区域的触觉信号的数据结构示例的示图。
[图9]是例示可以感知触觉刺激的频带中的区域之间的差异的示图。
[图10]是示出在针对每个区域区分触觉信号的数据格式的情况下编码数据的结构示例的示图。
[图11]是示出根据第一实施例的编码设备的功能配置的功能框图。
[图12]是用于描述触觉信号的格式转换的示例的示图。
[图13]是示出归因于过采样的混叠及其去除的示例的说明图。
[图14]是触觉信号的过采样的说明图。
[图15]是示出根据第一实施例的解码设备的功能配置的功能框图。
[图16]是示出根据第二实施例的触觉再现系统的配置示例的示图。
[图17]是示出根据第二实施例的发送设备的内部配置示例的示图。
[图18]是用于描述根据第二实施例的接收设备的内部配置示例的示图。
[图19]是示出在触觉灵敏度按照手、脸和脚的顺序变得更高的情况下相应区域的帧的排列顺序的示例的示图。
[图20]是示出根据区域的优先级顺序向触觉信号施加冗余的示例的说明图。
[图21]是示出根据第二实施例的发送设备的功能配置的功能框图。
[图22]是示出根据第二实施例的接收设备的功能配置的功能框图。
具体实施方式
在下文中,将参考附图以下列顺序描述根据本技术的实施例。
<1.第一实施例>
[1-1.触觉再现系统的概述]
[1-2.编码设备的配置]
[1-3.解码设备的配置]
[1-4.根据第一实施例的触觉再现方法]
(编码方法)
(编码侧的功能配置)
(解码方法)
(解码侧的功能配置)
[1-5.第一实施例的结论]
<2.第二实施例>
[2-1.触觉再现系统的概述]
[2-2.发送设备的配置]
[2-3.接收设备的配置]
[2-4.根据第二实施例的触觉再现方法]
(发送侧的功能配置)
(接收侧的功能配置)
[2-5.第二实施例的结论]
<3.本技术>
在此处,在本说明书中,每个术语定义如下。
触觉刺激:用于使人感知触觉的物理现象,诸如,振动现象。
触觉呈现:生成触觉刺激。
触觉信号:指示触觉刺激的模式的信号,诸如,指示振动波形的信号。
接收者:接收触觉呈现的人。
触觉特性:关于人的触觉的特性。根据区域(手、脸、脚等)而变化。
触觉灵敏度:用于主观确定触觉刺激的强度的灵敏度。根据人体的接受器或区域而变化。高触觉灵敏度意味着可以很容易地感知触觉信号。
编码数据:通过对触觉信号进行编码而获得的数据。流和帧用作更具体的概念。
注意,此处的“触觉灵敏度”包括两种类型,包括关于触觉刺激的振幅的触觉灵敏度和关于触觉刺激的频率的触觉灵敏度。在本说明书中,除非另有说明,否则“触觉灵敏度”不涉及振幅与频率之间的区别。
<1.第一实施例>
[1-1.触觉再现系统的概述]
图1示出了包括根据本技术的第一实施例的编码设备(编码设备2)和解码设备(解码设备3)的触觉再现系统1的配置示例。
触觉再现系统1包括:连接有多个触觉传感器5的编码设备2;被配置为能够经由预定网络4与编码设备2执行通信的解码设备3;以及与解码设备3连接的多个触觉呈现设备6。
触觉传感器5是执行触觉刺激的感测的部件/组件。在该示例中,使用诸如压电传感器或加速度传感器的振动传感器。触觉传感器通过与感测的目标物体(即,在该示例中的人体(或振动物体))接触来输出振动或运动作为电压变化。
在该示例中,每个触觉传感器5以有线方式连接到编码设备2,并且每个接触传感器5附接到作为目标物体的人体的不同区域(或振动物体),并且感测在相应区域中生成的触觉刺激。
例如,编码设备2包括诸如中央处理单元(CPU)和数字信号处理器(DSP)的计算机装置,根据预定的数据格式对由每个触觉传感器5输出的检测信号(触觉信号)执行编码,并且经由诸如因特网的预定的网络4将编码的触觉信号(即,编码数据)发送到解码设备3。
解码设备3包括诸如CPU和DSP的计算机装置,对经由网络4接收的编码数据进行解码,并且基于解码的触觉信号驱动每个触觉呈现设备6。
触觉呈现设备6被假设为生成触觉刺激的装置。在该示例中,使用诸如振动器或致动器的装置。
在该示例中,每个触觉呈现设备6附接到接收者的人体的不同区域,并且再现由相应的触觉传感器5感测到的触觉刺激。
该示例的触觉再现系统1被形成为在接收者中再现由附接有触觉传感器5的人感知的每个区域的触觉的系统以及可以处理人和接收者被远程布置的情况的系统。
此外,通过图1所示的触觉再现系统1的配置,通过经由网络4将通过由触觉传感器5执行的感测而获得的触觉信号发送到解码设备3侧,可以近似实时地执行触觉的再现。
注意,在图1的示例中,触觉传感器5的数量和触觉呈现设备6的数量(即,从其感测和再现触觉刺激的人体的区域的数量)被设置为三个,但是触觉传感器5的数量和触觉呈现设备6的数量不限于此。
[1-2.编码设备的配置]
图2是用于描述编码设备2的内部配置示例的示图。注意,图2示出了图1所示的触觉传感器5以及编码设备2的内部配置示例。
如图所示,编码设备2包括多个放大器21、多个A/D转换器22、预处理单元23、编码单元24、控制单元25、存储单元26、通信单元27和总线28。
如图所示,预处理单元23、编码单元24、控制单元25、存储单元26和通信单元27经由总线28连接,并且能够彼此执行数据通信。
来自每个触觉传感器5的检测信号被输入到相应的一个放大器21,被调整到适当的动态范围,并且然后被输入到相应的一个A/D转换器22,并且经受模拟/数字转换(A/D转换)。
每个A/D转换的检测信号(即,每个区域的触觉信号)被输入到预处理单元23。在预处理单元23中,执行各种类型的数字信号处理,诸如,噪声去除和触觉传感器5的传感器特性的校准。
已经经受由预处理单元23执行的信号处理的每个触觉信号被输入到编码单元24。
编码单元24例如包括DSP,并且根据预定的数据格式对每个输入的触觉信号进行编码。
控制单元25包括例如包括CPU、只读存储器(ROM)、随机存取存储器(RAM)等的微型计算机,并且根据存储在ROM中的程序控制整个编码设备2。
例如,控制单元25经由通信单元27执行与外部装置的数据通信。
通信单元27被配置为能够经由网络4执行与外部装置的数据通信,并且控制单元25被配置为能够经由通信单元27执行与连接到网络4的外部装置(在该示例中,尤其是解码设备3)的数据通信。具体地,控制单元25被配置为能够经由通信单元27将由编码单元24编码的触觉信号发送到解码设备3。
例如,存储单元26全面地表示诸如硬盘驱动器(HDD)和固态驱动器(SSD)的存储装置,并且用于编码设备2中的各种类型的数据存储。例如,控制单元25的控制所需的数据存储在存储单元26中。此外,基于控制单元25的控制,编码的触觉信号也可以存储在存储单元26中。
[1-3.解码设备的配置]
图3是用于描述解码设备3的内部配置示例的示图,并且示出了图1所示的触觉呈现设备6以及解码设备3的内部配置示例。
解码设备3包括多个放大器31、多个D/A转换器32、后处理单元33、解码单元34、控制单元35、存储单元36、通信单元37和总线38。
后处理单元33、解码单元34、控制单元35、存储单元36和通信单元37经由总线38连接,并且能够彼此执行数据通信。
控制单元35包括例如包括CPU、ROM、RAM等的微型计算机,并且通过根据存储在ROM中的程序执行处理来控制整个解码设备3。
例如,控制单元35经由通信单元37执行与外部装置的数据通信。
通信单元37被配置为能够经由网络4执行与外部装置的数据通信,并且控制单元35被配置为能够经由通信单元37执行与连接到网络4的外部装置(在该示例中,尤其是编码设备2)的数据通信。
控制单元35使由通信单元37从编码设备2接收的触觉信号(编码的触觉信号)输入到解码单元34。
例如,存储单元36全面地表示诸如HDD和SSD的存储装置,并且用于解码设备3中的各种类型的数据存储。例如,控制单元35的控制所需的数据存储在存储单元36中。
解码单元34通过根据预定的数据格式对编码的触觉信号进行解码来获得每个区域的触觉信号。由解码单元34获得的每个区域的触觉信号被输入到后处理单元33。
后处理单元33根据需要对每个区域的输入触觉信号执行诸如触觉呈现设备6的校准和预定滤波处理的信号处理。
已经通过后处理单元33的每个触觉信号被输入到相应的一个D/A转换器32,并且经受数字/模拟转换(D/A转换),并且然后由相应的一个放大器31调整到适当的动态范围,并且被输出到相应的一个触觉呈现设备6。
因此,基于触觉信号驱动每个触觉呈现设备6,并且可以生成对应于用户的每个区域的触觉刺激。
注意,以上描述仅给出了触觉信号,但是语音信号或视频信号可以与触觉信号一起被发送到解码设备3侧,并且声音或视频也可以提供给接收者。
[1-4.根据第一实施例的触觉再现方法]
(编码方法)
在下文中,将描述根据第一实施例的触觉再现方法。
根据第一实施例的触觉再现方法是关注人的触觉特性的方法。
作为人的触觉灵敏度的指示,已经报告了图4所示的振动检测阈值曲线。注意,在图4中,横轴指示频率,并且纵轴指示触觉刺激的振幅(振动:本该示例中为位移的振幅)的大小。
图4所示的振动检测阈值曲线指示人是否感觉到振动作为触觉,即,指示通过实验研究的触觉灵敏度的示例。人无法将小于曲线的振动感知为触觉。
在此处,众所周知,在人的皮肤下存在多个用于感知触觉的接受器。作为代表性的接受器,迈斯纳(Meissner)、默克尔(Merkel)、鲁菲尼(Ruffini)和帕西尼(Pacini)是已知的。
迈斯纳和帕西尼也分别称为“FA 1”和“FA2”,并且“FA”代表“快速适应”。默克尔和鲁菲尼也分别被称为“SA 1”和“SA 2”,并且“SA”代表“慢速适应”。
图5示出了当物体逐渐被推到皮肤上,保持一段时间,并且然后物体从皮肤上脱离时,可获得的每个接受器的神经放电分布。
当物体被推动时,默克尔(SA 1)持续执行神经放电,并且被假设为检测强度(位移、压力)。在直到物体的推入量变得恒定的部分中,即,假设迈斯纳(FA 1)执行速度检测。在推入量正在变化的部分中,即,假设帕西尼(FA 2)执行加速度检测。
图6示出了每个接受器的振动检测阈值曲线。图4所示的曲线不指示单个接受器的特性,而是指示通过组合由多个接受器获得的触觉获得的特性,如图6所示。
图4和图6所示的振动检测阈值曲线指示人可以感觉到高达约1kHz的振动作为触觉刺激。此外,尽管这些示图没有示出等于或大于1kHz的值,但是已经知道,尽管灵敏度在等于或大于1kHz的带宽中快速下降,但是实际上,人可以将频率为几kHz的振动感知为触觉刺激。
在触觉再现的常规应用中,在大多数情况下,目标是最多大约200Hz的振动。这归因于在大约200Hz下获得人的最高触觉灵敏度的事实。
然而,如上所述,从过去的各种实验中已经发现,人可以感觉到高达1kHz的振动作为触觉刺激,并且除了常规应用难以再现具有高真实感的触觉之外别无选择。
例如,当拔出瓶子的软木塞时引起的振动实际上包括诸如几kHz的高频。如果再现高达几百Hz的振动,则获得与实际触觉完全不同的触觉。
鉴于前述内容,在该示例中,通过将触觉信号和触觉呈现设备6的特性的带宽拓宽到大约1kHz来进一步增强真实感。
具体地,在该示例中,采用了通过感测现实中已经生成的诸如振动的触觉刺激来获得触觉信号并根据触觉信号执行触觉呈现的方法。
近年来,每一条信息被数字化和使用。类似地,将考虑数字化触觉信号的处理。
可以基于每单位时间所需的位深度(即位速率)来考虑数字化数据量。例如,在图4所示的振动检测阈值曲线中,由人可以感觉到的区域在纵轴上至少为50dB(-20dB至30dB)或更大,并且在横轴上约为1000Hz。在该示例中,考虑到由人实际感觉到的触觉信号的分布,感测到距阈值曲线+20dB范围内的信号。
具体地,如图7所示,假设振动范围为70dB(-20dB至50dB)。
在信号通过线性脉冲编码调制(LPCM)数字化的情况下,由于可以由1位表示的振幅为6dB,因此对于纵轴,需要12位,并且需要作为2倍的采样频率2000Hz(采样/秒)来再现高达1000Hz。因此,通过以下公式[1]获得必要的位速率B0。
B0=12位/采样×2000采样/秒=24千位/秒 [1]
例如,由于该值本身与作为语音信号的代表格式的CD的位速率=700kbps/ch相比非常小,因此如果触觉信号另外结合到某个系统中,则几乎不会发生大问题。
然而,如上所述,已经看到人可以感觉到的触觉信号的带宽拓宽到几kHz。例如,在触觉信号被再现到2000Hz的情况下,位速率变成公式[1]的两倍,即48千位/秒。
此外,与视觉(两只眼睛)和听觉(两只耳朵)不同,触觉存在于人的身体表面的任何地方。触觉存在于双手指尖的十个点,并且如果要处理所有这些点的触觉信号,则位速率进一步增加到十倍的位速率480千位/秒。如果通过考虑手指和手掌的每个关节来增加点的数量,则位速率显著增加。
此外,基本上,触觉信号是一维信号,但是可以在三个轴(x,y,z)上考虑振动的物理现象。如果所有这些都被处理,则必要的位速率进一步增加到三倍的位速率1440千位/秒,但是该值是超过音频CD的1411千位/秒的较大值。
以这种方式,尽管关于一个触觉信号的位速率不是很大,但是如果考虑到人可以感觉到的触觉,则需要巨大的量,并且大的负载肯定会施加到处理触觉信号的系统上。
鉴于前述内容,在本实施例中,注意到人体的区域之间的触觉灵敏度的差异。
接受器的类型、分布和灵敏度根据人体的区域而变化,并且其特征由被称为所谓的“躯体小人(somatic homunculus)”或“感觉小人(sensory homunculus)”的模型表示(例如,参考“http://web2.chubu-gu.ac.jp/web_labo/mikami/brain/32/index-32.html”等)。
这些“躯体小人”或“感觉小人”的附图根据预处理人体的相应区域的触觉的大脑的负责区域的大小以变形的方式定量地示出每个区域。然而,这并不能直接示出不同区域之间的触觉接受器的类型、分布或灵敏度的差异。此外,没有完全研究和揭示人的每个区域的触觉接受器的类型、分布和灵敏度。
然而,由于通过使用手而不是脚来进行使用触觉的精细工作,或者通过使用腹部或背部难以感觉像手的物体的粗糙,可以从人的日常生活中充分地定性和定量地认识到区域之间的触觉灵敏度的差异,因此可以容易地想象到区域并不具有完全相同的触觉特性。作为易于理解的示例,具体地,大量的报告和调查已经揭示了手指具有指纹,并且由于指纹而对触觉具有更高的灵敏度。由于背部和腹部没有指纹,因此认为难以仅通过单个编码方法来处理触觉信号。
此外,众所周知,如果人专注于一种感觉,则对其他感觉的灵敏度变弱。具体地,在人仅评估声音的情况下,人对声音质量劣化敏感。然而,在人同时评估声音和视频的情况下,尽管人对视频的劣化变得敏感,但是人对声音的劣化变得较不敏感。这是由于使视觉优先于听觉的人的感知机制而发生的现象。
此外,即使在仅感测声音的情况下,如果注意力集中在来自各种声源的声音的特定说话者的讲话上,则仅可以清楚地听到声音。这一直以来被称为所谓的鸡尾酒会效应。
此外,即使在仅感测视频的情况下,人也不能识别落入视野内的所有目标物体。人总是通过从城镇中移除广告展示和建筑物来从人群中找出家人或熟人或者通过特别关注其脸(表情)来破译情感来做出选择。
这种效果也可以应用于个体触觉。例如,当注意力集中在手的触觉上时,尽管最大限度地使用手的灵敏度,但是对其他区域的灵敏度有时反而下降。例如,尽管当人什么都不做时感觉到脚上的适度的风,但是当人使用手专注于精细的工作时可能没有感觉到脚上的风。
以这种方式,人对于物理量的感觉不是绝对的,并且属性根据人关注的区域而极大地变化。声音和视频的感知编码技术已经广泛推广,并且这些技术可以说是利用了人的感觉特性。这些技术已经被开发,因为听觉和视觉的机制已经被显著地揭示,并且积极地使用该机制。
另一方面,尽管关于触觉的感知机制(诸如尤其是作为传感器的触觉接受器)仍然未揭示许多点,但是通过使用对用于触觉的大脑的处理区域的研究以及在日常生活中可以自然感觉和感知的效果,可以说可以实现触觉信号的新颖有效的编码、发送和解码。
然而,在当前情况下尚未建立关于使用与听觉和视觉的情况类似的人的触觉特性的触觉信号的有效编码、发送和解码的技术。
由于触觉分布在人体的整个身体上,因此认为触觉呈现设备6附接在人体的各个位置,并且使用独立振动的多个触觉呈现装置。
作为具体示例,示出图8。
在图8所示的示例中,生成物体的振动的触觉再现装置附接到除了人的手和指尖之外的区域(诸如,脸、腹部和脚),并且振动被添加到这些区域。作为音频,基本上,再现对应于两只耳朵的2通道(ch)(通道(channels))的信号,但是根据情况,在一些情况下再现5.1通道、7.1通道和更多通道的音频信号。此时,为了执行期望的再现,需要确定从其再现每个通道的音频信号的方向和扬声器。
与音频信号类似,触觉信号也需要指示哪个通道振动哪个区域的信息。
此外,当假设经由因特网、无线等发送触觉信号时,触觉信号自然被认为是数字化数据。在这种情况下,数字化触觉信号需要作为具有称为帧的固定时间单位的数据来处理。
因此,需要如图8所示的数据结构。
在该示例中,每个区域的触觉信号(PCM数据)存储到单独的帧中。如图所示,该帧包括用作帧报头的区域和用于存储触觉信号的真实数据的区域。帧报头至少存储指示触觉信号的区域的信息作为帧的报头信息。
此外,相应区域的帧被集成并被视为称为流的单位的数据。该流设置有用作流报头的区域和存储每个区域的帧的区域。流报头存储指示数字化触觉信号的规格(量化位长度、采样频率、流的数据大小等)的信息、关于包括在流中的帧的数量的信息等作为报头信息。
执行每个区域的触觉信号的这种编码,并且当发送触觉信号时,如图所示,处理具有在时间轴上排列相应时间的流的配置的编码数据。
通过执行上述编码,可以获得触觉信号的发送和再现的高度便利性。
在此处,如上所述,如果被赋予触觉信号的区域的数量增加,则触觉信号的位速率成比例地增加,并且大的负载被施加到系统上。鉴于前述内容,在本实施例中,通过考虑每个区域的触觉特性来区分每个区域的触觉信号的位分布,在考虑整个区域的触觉信号的情况下可获得的位速率降低。
在此处,为了简化描述,将考虑对人体的手的一个点和脚的一个点执行触觉呈现的情况。如果基本条件被设置为与公式[1]相同的条件,则通过以下公式[2]获得在这种情况下所需的总位速率B(手+脚)。
B(手+脚)=12位/采样×2000采样/秒×2=48千位/秒 [2]
如从以上描述可以看出的,处理人的手和脚的触觉的大脑区域的比率有很大的不同。尽管手和脚的触觉特性(例如,灵敏度)并没有精确地转换为倍数级别的数值,但是从经验上可以明显看出,从触觉灵敏度方面来看,手优于脚。因此,基于手的灵敏度(S-手)的脚的灵敏度(S-脚)的转换系数(W)由以下公式[3]表示。
S-脚=W×S-手(W<1.0) [3]
注意,最初,手的触觉灵敏度在手指与手掌之间变化,但是为了简单起见,考虑了“手”和“脚”的区域。
如果假设上述转换系数W为W=0.25,例如,一个位对应于6dB(2倍)。因此,相对于手的触觉信号所需的量化位长度为12位,脚的触觉信号所需的量化位长度变为10位,并且可以如下获得总位速率B(手+脚)。
B(手)=12位/采样×2000采样/秒=24千位/秒 [4]
B(脚)=10位/采样×2000采样/秒=20千位/秒 [5]
B(手+脚)=44千位/秒 [6]
在上述示例中,位速率仅从[2]降低大约10%,但是如果进一步假设脚仅可以感知手的1/2频率,则可以如下获得总位速率B(手+脚)。
B(手)=12位/采样×2000采样/秒=24千位/秒 [7]
B(脚)=10位/采样×1000采样/秒=10千位/秒 [8]
B(手+脚)=34千位/秒 [9]
因此,位速率可以从[2]降低大约30%。
下面将描述区分区域之间的采样频率和量化位长度的另一示例。
在该示例中,将考虑对手、脸和脚施加触觉刺激的情况。
在这种情况下,如果还为脸和脚设置了与手的采样频率和量化位长度类似的采样频率和量化位长度,则总位速率B(手+脸+脚)表示为B(手+脸+脚)=72千位/秒 [10]。
在此处,例如,如下设置脸和脚的相应灵敏度系数。
S-脸=W-脸×S-手(W=0.5) [11]
S-脚=W-脚×S-手(W<0.25) [12]
即,如果手的触觉信号所需的量化位长度被设置为12位,则脸的量化位长度变为11位,并且脚的量化位长度变为10位。
此外,在此处,假设可以感知触觉刺激的频带根据手、脸和脚的区域而变化。
具体地,例如,如图9所示,假设手可以仅感知高达1kHz的频带中的振动(参考图9A),脸可以仅感知高达500Hz的频带中的振动(参考图9B),并且脚可以仅感知高达250Hz的频带中的振动(参考图9C)。
在上述条件下,如果在这种情况下手的触觉信号所需的量化位长度被设置为12位,则可以如下获得总位速率B(手+脸+脚)。
B(手)=12位/采样×2000采样/秒=24千位/秒 [13]
B(脸)=11位/采样×1000采样/秒=11千位/秒 [14]
B(脚)=10位/采样×500采样/秒=5千位/秒 [15]
B(手+脸+脚)=40千位/秒 [16]
因此,与[10]的情况相比,总位速率可以降低大约45%。
如上所述,图10示出了在针对每个区域区分触觉信号的数据格式的情况下编码数据的结构示例。在此处,作为示例,示出了对应于公式[9]的情况的帧的数据结构和流的数据结构。
如图所示,每个区域的帧的报头存储指示相应区域的触觉信号的量化位长度和采样频率的值。因此,即使触觉信号的数据格式根据区域而变化,也可以容易地识别存储在解码设备3侧的帧中的触觉信号的数据格式。
在音频信号是类似于触觉信号的一维信号的情况下,即使信号包括多个帧(或通道),由于所有这些帧(或通道)通常具有相同的格式,因此仅需要将量化位长度和采样频率写入流的报头。在如上所述针对每个区域区分触觉信号的数据格式的情况下,所有帧不需要具有相同的数据格式,而数据格式与音频信号的数据格式相比变得更复杂,因此从位速率方面提高了效率并且是有利的。
在此处,在以上描述中,采样频率和量化位长度被假设为静态定义的,即,每个区域的位分布被假设为静态定义的。可选地,例如,每个区域的位分布也可以根据时间条件变化而动态地变化。
作为具体示例,将考虑发送路径上的位速率由于某个因素而被暂时限制并且区域的触觉信号的总位速率不落入限制的位速率内的情况。
在这种情况下,特定区域的采样频率和量化位长度受到限制,以便落入限制的位速率内,并且该区域的位分布减小。此时,期望施加限制的区域是具有低触觉灵敏度的区域(即,在到目前为止描述的示例中的脸或脚)以抑制触觉再现性下降。
此外,另一方面,即使对于具有高灵敏度的区域的触觉信号,如果信号本身不存在,即,如果信号振幅没有达到可感知的振幅,则可以说发送的必要性低。因此,以这种方式,对于具有小信号振幅的区域的触觉信号,可以减少位分布。
作为示例,施加触觉刺激的区域被假设为包括手、脸和脚。在这种情况下,在编码设备2中,监视每个区域的触觉信号的振幅值,并且确定是否存在信号振幅小的区域(具体地,信号振幅没有达到人可感知的振幅值)。例如,针对流中的每个帧执行确定。注意,可以基于图4所示的振动检测阈值曲线来执行关于信号振幅是否达到人可感知的振幅值的确定。
作为确定的结果,针对被确定为触觉信号的振幅值没有达到可感知的振幅值的区域减少位分布。具体地,位分布被设置为零。
例如,在被确定为振幅值没有达到可感知的振幅值的区域仅包括脸和脚的情况下,位分布由以下公式表示。
B(手)=12位/采样×2000采样/秒=24千位/秒 [17]
B(脸)=0千位/秒 [18]
B(脚)=0千位/秒 [19]
B(手+脸+脚)=24千位/秒 [20]
可选地,相对照地,在被确定为振幅值没有达到可感知的振幅值的区域仅包括手的情况下,位分布由以下公式表示。
B(手)=0千位/秒 [21]
B(脸)=11位/采样×2000采样/秒=22千位/秒 [22]
B(脚)=10位/采样×2000采样/秒20千位/秒 [23]
B(手+脸+脚)=42千位/秒 [24]
注意,在公式[22]和[23]中,脸和脚的采样频率与手的采样频率相同,但是也可以采用低于采样频率的采样频率(参考公式[14]和[15])。
通过采用上述位分布,即使在受限条件下,也可以发送必要的触觉信号。
(编码侧的功能配置)
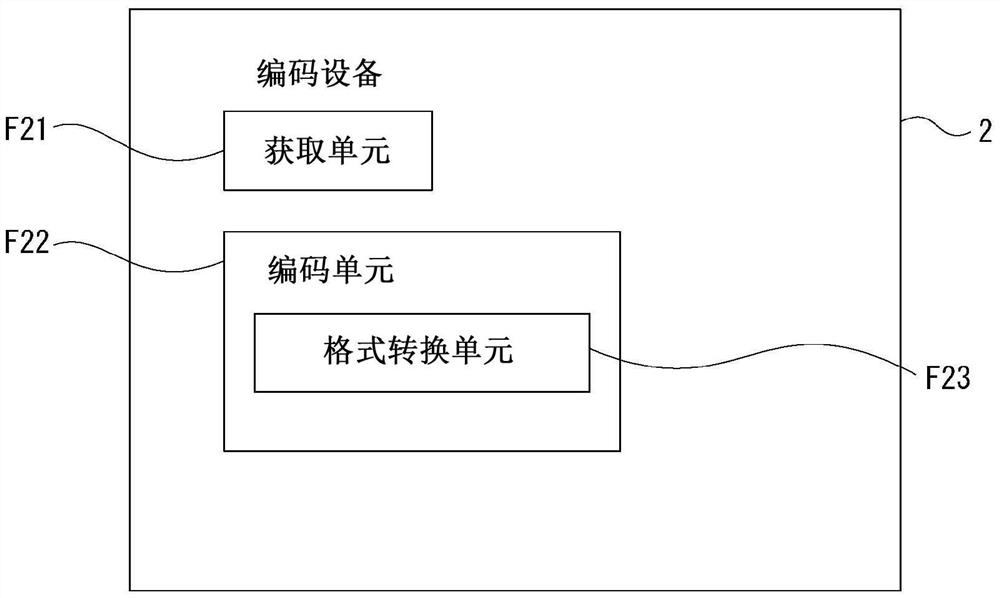
图11是示出用于实现上述编码方法的编码设备2的功能配置的功能框图。
如图所示,编码设备2包括作为获取单元F21和编码单元F22的功能。此外,编码单元F22包括作为格式转换单元F23的功能。
获取单元F21获取人体的每个区域的触觉信号。在该示例中,放大器21和A/D转换器22对应于获取单元F21。
编码单元F22对已经由获取单元F21获取的每个区域的触觉信号执行编码,使得数据格式在人体的不同区域之间变得不同。
该示例的编码单元F22使用格式转换单元F23执行编码以根据触觉灵敏度改变区域的位分布。具体地,编码单元F22执行编码以减少具有低触觉灵敏度的区域的位分布。换句话说,例如,如在公式[7]和[8]或公式[13]、[14]和[15]中一样,具有低触觉灵敏度的区域的触觉信号的量化位长度缩短或者触觉信号的采样频率降低。
此外,该示例的编码单元F22使用格式转换单元F23来减少具有小信号振幅的区域的位分布。具体地,例如,对于触觉信号的振幅值没有达到可感知的振幅值的区域,编码单元F22缩短触觉信号的量化位长度或降低触觉信号的采样频率,例如,如在公式[7]和[8]或公式[13]、[14]和[15]中一样。
可选地,例如,在存在触觉信号的振幅值没有达到可感知的振幅值的区域的情况下,如在公式[17]、[18]和[19]或公式[21]、[22]和[23]中一样,对于该区域的触觉信号,位分布被设置为零。
此外,该示例的编码单元F22针对每个区域将指示区域的类型的索引信息添加到触觉信号。具体地,如图10所示,指示区域的类型的信息存储在触觉信号的帧报头中。
在该示例中,由编码单元24实现上述作为编码单元F22的功能。
为了区分每个区域的触觉信号的量化位长度和采样频率,例如,具有相同量化位长度和采样频率的A/D转换器22用作每个A/D转换器22,并且编码单元24在A/D转换的触觉信号中执行需要转换的区域的触觉信号的量化位长度和采样频率的转换处理。
注意,可以通过使用具有不同量化位长度和采样频率的A/D转换器22作为A/D转换器22来实现对每个区域的触觉信号的量化位长度和采样频率进行区分的功能。在这种情况下,每个A/D转换器22具有编码单元F22的功能。
(解码方法)
本实施例的解码设备3根据每个区域的数据格式,执行通过由编码设备2执行的编码而获得的触觉信号(即,在人体的不同区域之间具有不同的数据格式的触觉信号)的再现。
在此处,触觉信号是一维信号,并且其数据处理基本上可以被认为类似于语音信号。通常,语音信号的量化位长度和采样频率在每个通道中是相同的,并且在再现侧,可以在每个通道中使用具有相同规格的D/A转换器32。另一方面,在本实施例中,由于量化位长度和采样频率根据通道而变化,因此假设使用在通道之间具有不同规格的D/A转换器32。因此,存在关于解码设备3的配置的复杂性和伴随的成本增加的担忧。
鉴于前述内容,在该示例中,如图12所示,当再现每个区域的触觉信号时,对至少一个区域的触觉信号执行格式转换处理。在图12所示的示例中,在设置手的触觉信号的量化位长度=12位和采样频率=2kHz同时设置脚的触觉信号的量化位长度=10位和采样频率=1kHz的情况下,示出了对脚的触觉信号执行格式转换以将格式转换为手的触觉信号的数据格式的情况。
通过执行这种格式转换,可以使区域的触觉信号的数据格式相同,并且具有相同规格的D/A转换器可以用作D/A转换器32。
此时,为了特别容易地将采样频率设置为固定值,在编码设备2侧,期望将区域的采样频率之间的比率设置为整数倍。例如,如图12中的示例,通过设置1000采样/秒和2000采样/秒,可以通过执行2倍的过采样将前者变为后者。
在此处,在对语音信号执行过采样的情况下,如果考虑从8000采样/秒至16000采样/秒的过采样,则在再现频率下以4000Hz到8000Hz生成混叠分量,并且这会被听到。因此,低通滤波器(LPF)是必不可少的。这在图13中示出。
然而,在触觉信号的情况下,据说可感知频率的范围高达约1kHz(采样频率=2kHz)。此外,最初,在许多情况下,触觉呈现设备6的再现范围被设置为大约相同的范围。因此,与语音信号的情况不同,触觉信号的过采样并不总是需要提供LPF。
例如,由于D/A转换器32通常用于语音目的(4kHz的信号带宽,即采样频率=大约8kHz是下限),因此支持2kHz的采样频率的D/A转换器32并不常见。因此,即使为了更高的效率使用2kHz的触觉信号的规格,普通的D/A转换器32也不能照原样再现触觉信号。
因此,例如,为了使普通的D/A转换器32可用,执行用于将每个区域的触觉信号转换为预定采样频率(诸如,8kHz或更高的采样频率)的过采样处理。
例如,在通过简单的零值内插执行用于将采样频率从2kHz转换到8kHz的过采样处理的情况下,在1kHz至4kHz的信号带宽下产生混叠,但是如上所述,由于该频带是具有极低触觉灵敏度的区域,因此可以毫无问题地省略LPF。此外,如果由触觉呈现设备6不能再现混叠,则也可以省略LPF。在图14中示出该图像。
(解码侧的功能配置)
图15是示出解码设备3的功能配置的功能框图。
如图所示,解码设备3包括作为获取单元F31和解码单元F32的功能。此外,解码单元F32包括作为格式转换单元F33的功能。
获取单元F31获取在人体的不同区域之间具有不同的数据格式的触觉信号。在该示例中,获取已经由编码设备2发送的每个区域的触觉信号的部分对应于获取单元F31。在该示例中,通信单元37对应于获取单元F31。
该示例的获取单元F31获取触觉信号,该触觉信号具有以根据触觉灵敏度改变区域的位分布的方式定义的相应区域的数据格式。具体地,获取单元F31获取触觉信号,其中,以改变具有低触觉灵敏度的区域的位分布的方式来定义每个区域的数据格式。换句话说,例如,如在公式[7]和[8]或公式[13]、[14]和[15]中一样,对于具有低触觉灵敏度的区域,获取具有缩短的量化位长度和降低的采样频率的触觉信号。
此外,该示例的获取单元F31获取对于具有大信号振幅的区域的位分布增加的触觉信号作为触觉信号。具体地,例如,根据基于触觉信号的振幅值是否达到可感知的振幅值的信号振幅的大小,例如,如在公式[7]和[8]或公式[13]、[14]和[15]中一样,获取包括具有缩短的量化位长度和降低的采样频率的触觉信号的每个区域的触觉信号。
可选地,例如,根据未达到可感知的振幅值的触觉信号的振幅值,如在公式[17]、[18]和[19]或公式[21]、[22]和[23]中一样,获取在部分区域的位分布被设置为零的情况下位分布未被设置为零的区域的触觉信号。
此外,该示例的获取单元F31针对每个区域获取添加有指示区域的类型的索引信息的触觉信号。具体地,如图10所示,获取在帧报头中存储有指示区域的类型的信息的触觉信号。
此外,解码单元F32对由获取单元F31获取的触觉信号进行解码。在该示例的解码设备3中,用于实现解码单元F32的配置是至少包括解码单元34的部分。
该示例的解码单元F32使用格式转换单元F33转换相应区域的触觉信号中的至少任何一个触觉信号的量化位长度和采样频率中的任何一个。注意,在为了D/A转换器32的规格而仅转换采样频率的情况下,量化位长度的转换是不必要的。相对照地,在仅转换量化位长度的情况下,采样频率的转换是不必要的。
由解码单元34实现作为格式转换单元F33的功能。
注意,如上所述,触觉信号的量化位长度和采样频率有时基于信号振幅等的大小的确定结果而随时间变化。在该示例中,由于关于量化位长度和采样频率的信息存储在帧报头中,因此即使量化位长度和采样频率以这种方式随时间变化,它们的值也被指示在帧报头中。
格式转换单元F33基于存储在帧报头中的关于量化位长度和采样频率的信息,针对每个区域的触觉信号改变格式转换的处理内容,具体地,改变过采样处理等的处理内容。
因此,即使在触觉信号的量化位长度和采样频率随时间变化的情况下,也可以适当地执行触觉信号的D/A转换。
此外,该示例的解码单元F32基于指示添加到触觉信号的区域的类型的索引信息来对每个区域的触觉信号执行解码。具体地,解码单元F32(解码单元34)基于存储在帧报头中的指示区域的类型的信息来识别触觉信号的区域,并且执行适合于该区域的处理。例如,解码单元F32执行将触觉信号输出到对应于该区域的输出通道等的处理。
注意,已经给出了近似实时执行触觉再现的示例的以上描述,但是也可以构造将通过上述方法编码的触觉信号存储到预定存储介质中、根据需要读出触觉信号并再现触觉信号的系统。在这种情况下,编码数据可以作为预定格式的数据文件存储在存储介质中。此外,用户可以对数据文件执行处理和编辑,并且可以执行伴随处理和编辑的额外信息的标记等。
上述存储介质可以例如是诸如光盘或存储卡的可移动介质。在这种情况下,例如,可以考虑诸如个人计算机的解码设备3读出存储在可移动介质中的触觉信号的数据文件并再现触觉信号等的配置。
此外,作为另一示例,也可以考虑用作客户终端的解码设备3经由网络4获取存储在云的存储服务器中的触觉信号的数据文件并再现触觉信号的配置。
此外,在以上描述中,已经例示了针对每个区域区分触觉信号的数据格式(即,所有区域的触觉信号的数据格式不同)的情况,但是数据格式在部分区域之间可以相同。换句话说,触觉信号的数据格式仅需要至少在不同区域之间不同。
在此处,已经参考图11和图15描述的作为编码单元F22和解码单元F32的功能可以被实现为由CPU等执行的软件处理。基于程序来执行软件处理,并且该程序被存储在存储装置中,计算机装置(诸如,CPU)可以从该存储装置中读出程序。
[1-5.第一实施例的结论]
如上所述,根据第一实施例的编码设备(编码设备2)包括编码单元(编码单元F22),该编码单元在人体的不同区域之间使用不同的数据格式对触觉信号进行编码。
因此,例如,考虑到人体区域之间的触觉特性的差异,可以通过使用人体区域之间的触觉灵敏度的差异来减少具有低触觉灵敏度的区域的触觉信号的数据分布等来执行触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的编码设备中,编码单元在人体的具有不同触觉特性的区域之间使用不同的数据格式对触觉信号进行编码。
因此,可以使用人体区域之间的触觉灵敏度等的差异来执行触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的编码设备中,编码单元对触觉信号进行编码,以根据触觉灵敏度来改变对区域的位分布。
因此,可以考虑区域之间的触觉特性的差异来执行触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的编码设备中,编码单元对触觉信号进行编码,以使量化位长度在不同的区域之间变得不同。
因此,可以通过缩短具有低触觉灵敏度(对触觉刺激振幅的低灵敏度)的区域的量化位长度来实现触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的编码设备中,编码单元对触觉信号进行编码,以使采样频率在不同的区域之间变得不同。
因此,可以通过降低针对具有低触觉灵敏度(对触觉刺激的频率的低灵敏度)的区域的采样频率来实现触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的编码设备中,编码单元包括格式转换单元(格式转换单元F23),该格式转换单元转换相应区域的触觉信号的至少任何一个触觉信号的量化位长度和采样频率中的至少任一个。
通过以这种方式执行编码使量化位长度和采样频率中的至少任一个变化,可以实现数据量减少。
此外,在根据第一实施例的编码设备中,编码单元执行编码,以增加触觉信号的信号振幅大的区域的位分布。
因此,例如,对于信号振幅小的区域(诸如,信号振幅没有达到可感知的振幅)的触觉信号,即,从信号振幅的大小方面来看,触觉刺激被估计为难以感知的区域,例如,包括不发送信号的位分布减小。
因此,由于考虑到区域之间的触觉特性的差异来执行触觉信号的数据量减少,因此可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的编码设备中,编码单元执行将指示区域的类型的索引信息添加到触觉信号的编码。
因此,增强了识别触觉信号的区域的容易性和准确性,并且可以实现解码设备的配置的简化、成本的降低以及每个区域的触觉再现的准确性的提高。
此外,根据第一实施例的编码方法是在人体的不同区域之间使用不同的数据格式对触觉信号进行编码的编码方法。
根据这样的编码方法,可以获得与根据第一实施例的上述编码设备类似的功能和效果。
此外,根据第一实施例的编码侧的程序是用于使信息处理设备实现在人体的不同区域之间使用不同的数据格式对触觉信号进行编码的编码功能的程序。
根据基于第一实施例的编码侧的这样的程序,可以实现根据第一实施例的上述编码设备。
此外,根据第一实施例的解码设备(解码设备3)包括解码单元(解码单元F32),该解码单元对在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码。
因此,例如,考虑到人体区域之间的触觉特性的差异,可以通过使用人体区域之间的触觉灵敏度的差异来减少具有低触觉灵敏度的区域的触觉信号的数据分布等来执行触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的解码设备中,解码单元对在具有人体的不同触觉特性的区域之间具有不同的数据格式的触觉信号进行解码。
因此,可以使用人体区域之间的触觉灵敏度等的差异来执行触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的解码设备中,解码单元对触觉信号进行解码,该触觉信号具有以根据触觉灵敏度改变区域的位分布的方式定义的相应区域的数据格式。
因此,可以考虑区域之间的触觉特性的差异来执行触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的解码设备中,解码单元对在不同区域之间具有不同量化位长度的触觉信号进行解码。
因此,可以通过缩短具有低触觉灵敏度(对触觉刺激的振幅的低灵敏度)的区域的量化位长度来实现触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的解码设备中,解码单元对在不同区域之间具有不同采样频率的触觉信号进行解码。
因此,可以通过降低具有低触觉灵敏度(对触觉刺激的频率的低灵敏度)的区域的采样频率来实现触觉信号的数据量减少。
因此,可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的解码设备中,解码单元包括格式转换单元(格式转换单元F33),该格式转换单元输入在不同区域之间量化位长度和采样频率中的至少一个不同的触觉信号,并且转换相应区域的触觉信号中的至少任一个触觉信号的量化位长度和采样频率中的至少任一个。
因此,消除了根据区域之间的量化位长度或采样频率的差异来提供执行触觉信号的D/A转换的多种类型的D/A转换器的需要。
因此,可以实现解码设备的配置的简化和成本的降低。
此外,在根据第一实施例的解码设备中,解码单元对具有大信号振幅的区域的位分布增加的触觉信号进行解码作为触觉信号。
因此,例如,对于信号振幅小的区域(诸如,信号振幅没有达到可感知的振幅)的触觉信号,即,从信号振幅的大小方面来看,触觉刺激被估计为难以感知的区域,例如,包括不发送信号的位分布减小。
因此,由于考虑到区域之间的触觉特性的差异来执行触觉信号的数据量减少,因此可以通过实现触觉信号的数据量减少同时确保触觉再现性来使与触觉再现相关的系统更有效。
此外,在根据第一实施例的解码设备中,解码单元输入添加有指示区域的类型的索引信息的触觉信号,并且基于该索引信息对相应区域的触觉信号执行解码。
因此,增强了识别触觉信号的区域的容易性和准确性,并且可以实现解码设备的配置的简化、成本的降低以及每个区域的触觉再现的准确性的提高。
此外,根据第一实施例的解码方法是对在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码的解码方法。
而且,根据基于第一实施例的这样的解码方法,可以获得与根据第一实施例的上述解码设备类似的功能和效果。
此外,根据第一实施例的解码侧的程序是用于使信息处理设备实现对在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码的解码功能的程序。
根据这样的程序,可以实现根据第一实施例的上述解码设备。
<2.第二实施例>
[2-1.触觉再现系统的概述]
随后,将描述第二实施例。
第二实施例针对触觉信号的发送延迟采取措施。
图16示出了根据第二实施例的触觉再现系统1A的配置示例。
注意,在以下描述中,与已经描述的部分类似的部分被分配相同的参考数字,并且将省略描述。
在图16中,触觉再现系统1A与根据第一实施例的触觉再现系统1的不同之处在于,设置了发送设备3A来代替解码设备3,并且设置了接收设备40。
在触觉再现系统1A中,附接到接收者的每个触觉呈现设备6不以有线方式连接到发送设备3A,并且经由无线通信执行触觉信号从发送设备3A到触觉呈现设备6的发送。接收设备40用作通过无线通信接收由发送装置3A发送的触觉信号的设备,并且将触觉信号发送到触觉呈现设备6。在该示例中,每个触觉呈现设备6以有线方式连接到接收设备40,并且附图中由虚线包围的部分(即,接收设备40和触觉呈现设备6)被假设为附接到接收者的部分。
例如,如在第一实施例中所例示的,在解码设备3和每个触觉呈现设备6以有线方式连接的情况下,如果解码设备3的尺寸大,则触觉呈现设备6所附接到的接收者可能感到麻烦。预期这种麻烦的感觉随着施加触觉刺激的区域的数量的增加而增加。
通过触觉再现系统1A的上述配置,可以布置尺寸小于解码设备3的接收设备40,并且防止接收者感到如上所述的麻烦。
[2-2.发送设备的配置]
图17示出了发送设备3A的内部配置示例。
发送设备3A与图3所示的解码设备3的不同之处在于,没有设置放大器31、D/A转换器32、后处理单元33和解码单元34,设置了发送数据生成单元51和无线通信单元52,并且设置了控制单元35A来代替控制单元35。
如图所示,发送数据生成单元51、无线通信单元52、控制单元35A、存储单元36和通信单元37经由总线38连接,并且能够彼此执行数据通信。
发送数据生成单元51对通过网络4经由通信单元37获得的来自编码设备2的触觉信号的编码数据执行预定编码,并且生成要发送到接收设备40的编码数据。
注意,稍后将描述由该示例的发送数据生成单元51执行的处理。
例如,无线通信单元52使用诸如蓝牙(注册商标)的预定通信方法来执行近场通信。
控制单元35A例如包括微型计算机,并且控制整个发送设备3A。具体地,控制单元35A执行从通信单元37到发送数据生成单元51的编码数据的输出控制以及由发送数据生成单元51生成的编码数据到无线通信单元52的输出控制。
因此,每个区域的触觉信号可以经由无线通信单元52发送到外部装置。
注意,在第二实施例中,如第一实施例中所述,相应区域的触觉信号的数据格式在不同区域之间可以不同,或者在所有区域之间可以相同。
[2-3.接收设备的配置]
图18是用于描述接收设备40的内部配置示例的示图,并且示出了触觉呈现设备6以及接收设备40的内部配置示例。
如图所示,接收设备40包括放大器31、D/A转换器32、后处理单元33和解码单元34A,并且包括控制单元41、存储单元42、无线通信单元43和总线44。后处理单元33、解码单元34A、控制单元41、存储单元42和无线通信单元43经由总线44连接,并且能够彼此执行数据通信。
例如,无线通信单元43使用可以与发送设备3A中的无线通信单元52执行通信的方法(诸如,蓝牙)来执行近场通信。由无线通信单元43接收从发送设备3A发送的编码数据。
控制单元41例如包括微型计算机,并且控制整个接收设备40。
例如,存储单元42被假设为与存储单元26、存储单元36等类似的存储装置,并且用于存储由控制单元40等使用的各种类型的数据。
解码单元34A对经由无线通信单元43输入的编码数据执行与在第一实施例中描述的解码单元34的处理类似的处理。更具体地,解码单元34A响应于触觉信号的数据格式在区域之间不同的情况,对必要区域的触觉信号执行诸如格式转换的处理。此外,解码单元34A对输入的编码数据执行用于针对发送延迟采取措施的处理。稍后将描述该处理。
[2-4.根据第二实施例的触觉再现方法]
在此处,无论有线还是无线,如果在某个部分执行数据发送,则在一些情况下发生数据丢失。检查数据丢失,并且当存在丢失时,可以通过重发数据来补偿丢失,但是会生成额外的数据发送。因此,出现有效位速率的增加和发送延迟。
当使用蓝牙的无线发送被视为具体示例时,受到使用相同传送频率的Wi-Fi(注册商标)的影响。由于蓝牙的无线电场强比Wi-Fi低,因此可以说蓝牙特别容易受到影响。在发送时,编码数据作为被称为分组的预定发送单位中的数据被发送。在上述状态下,频繁发生分组丢失,并且例如在使用蓝牙的高级音频分发配置文件(A2DP)的语音信号的发送中,在发生分组丢失的情况下,在接收侧准备大的流缓冲器以重发分组。通过在流缓冲器中累积了固定流之后开始再现,防止声音分散。
然而,编码数据的累积量相当于延迟量,并且如果累积量变得太大,则出现问题。例如,当在显示器上观看视频时听到相应的声音的情况下,唇型同步变得过时,这导致了大的问题。
触觉信号的发送具有与上述语音信号的情况类似的问题。
例如,在存在挥动棒球的球棒,并且在球棒击打球的定时期望向接收者施加触觉刺激的视频的情况下,如果流缓冲器的容量很大或者由于分组丢失的发生而重复重发,则视觉和触觉明显变得不同步,并且接收者可能感到很大的陌生感。
以这种方式,如果考虑触觉与其他感觉之间的同步,则要求尽可能地消除分组的重发,并且尽可能地减小接收侧的流缓冲器。为了实现这一点,采用这样的数据结构是有效的,在该数据结构中,丢失部分分组不会导致大的问题。具体地,如上所述,由于人在区域之间的触觉灵敏度上存在差异,因此采用考虑该差异的数据结构。
在此处,如图10等所示,在流中,指示部分的报头信息被添加到帧,并且在报头信息之后记录实际的触觉信号。如果使记录在帧中的触觉信号的时间粒度太小,则占据发送的报头的百分比增加并且效率降低。相对照地,如果使时间粒度太大,则发生延迟问题或受到干扰的影响。因此,期望在帧中对大约几毫秒的触觉信号进行编码。
由上述分组发送每个区域的帧。由于随着分组大小变得更长,发送所花费的时间变得更长,因此很容易随机地受到干扰。
鉴于前述内容,在第二实施例中,按照从流的顶侧起具有较高触觉灵敏度的区域的顺序封闭帧。
在图19中示出具体示例。
图19示出了在触觉灵敏度按照手、脸和脚的顺序变得更高的情况下相应区域的帧的排列顺序的示例。
在这种情况下,在流中,相应区域的帧(触觉信号)按照手、脸和脚的顺序从顶侧排列。
在常规发送中,接收侧在完全成功接收分组时返回确认(ACK)。
与此相反,在第二实施例中,如果仅接收到作为包括在分组中的流的一部分的具有高触觉灵敏度的帧,则返回ACK。为此,指示接收成功时允许返回ACK的大小的参数记录在流报头中(参考图19中的“确认允许大小(Ack Allow Size)”)。在接收侧,如果确认由参数指定的部分的接收成功,则ACK返回到发送侧。
利用这种配置,由于当从具有高触觉灵敏度的帧观看时,变得等同于使用明显短的分组的发送,因此干扰的概率降低。即使由于具有低触觉灵敏度的帧中的干扰而发生丢失,如果再现具有高触觉灵敏度的数据,则对人的触觉的影响变得相对较小,这是有利的。换句话说,可以确保固定量的触觉再现性。
注意,已经给出了示例的以上描述,其中,排列帧的优先级顺序是触觉灵敏度的高度,即基于触觉灵敏度的高度的优先级顺序,但是该优先级顺序可以是基于触觉信号的振幅的大小的优先级顺序。即,例如,触觉信号的振幅值达到可感知的振幅值的区域的帧优先排列在流中(排列在顶侧)等。
此外,在以上描述中,在接收到具有最高优先级顺序的区域的帧时,返回ACK。例如,可以在接收到优先级顺序中的前个n帧(n是等于或大于2的自然数并且小于流中的区域的总数)时返回ACK,诸如,在接收到优先级顺序中的前两个信号时返回ACK。
为了获得与使用明显短的分组的发送等同的上述效果,仅需要在至少接收到除了具有最低优先级的区域之外的具有最高优先级的区域的触觉信号时返回ACK。
在此处,如上所述,即使使用了明显短的分组,由于每单位时间的干扰率是恒定的,因此发送分组的时间内的干扰也不会变为零。
因此,如图20所示,具有高触觉灵敏度的帧(具有高优先级顺序的帧)被布置在流中的多个点处,并且被冗余地发送。
此时,指示用于在接收成功时返回ACK的帧的信息(诸如,指定帧ID的ID指定信息)存储在流报头中,并且如果从ID指定信息识别的至少一个帧的接收成功,则即使在其他帧中发生丢失,也返回ACK。
图20示出了一个示例,其中,在帧ID=0至帧ID=3的四个帧排列在一个流中的情况下,当手的帧被排列为顶部ID=0的帧时,脸的帧被排列为从顶部起第二ID=1的帧,脚的帧被排列为从顶部起第三ID=2的帧,并且手的帧再次被排列为从顶部起第四ID=3的帧,指定ID=0和ID=3的ID指定信息存储在流报头中。
利用该配置,如果每单位时间的干扰率是恒定的,则具有高触觉灵敏度的帧的抗丢失性可以提高至多倍。
注意,同样在上述方法中,优先级顺序也可以是基于触觉信号的信号振幅的优先级顺序,而不是基于触觉灵敏度的高度的优先级顺序。
此外,已经给出了示例的以上描述,其中,具有触觉信号冗余的区域限于具有最高优先级顺序的区域,但是优先级顺序中的前n个区域(n是等于或大于2的自然数并且小于流中的区域的总数)可以具有触觉信号的冗余。
(发送侧的功能配置)
图21是示出发送设备3A的功能配置的功能框图。
如图所示,发送设备3A包括作为编码单元F34和发送单元F35的功能。
编码单元F34通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据。编码单元F34的功能由发送数据生成单元51实现。
在此处,编码单元F34从具有较高优先级顺序的区域开始按顺序排列触觉信号。具体地,关于功能,如上述图19所例示的,发送数据生成单元51生成具有流结构的编码数据,在该流结构中,帧从具有较高触觉灵敏度的区域的顶侧开始按顺序排列。此时,发送数据生成单元51将对应于图19所示的“确认允许大小”的参数存储在流报头中。
此外,编码单元F34对具有高优先级顺序的区域的触觉信号给予冗余。关于功能,如上述图20所例示的,发送数据生成单元51生成编码数据,其中,例如,冗余仅被给予具有最高触觉灵敏度的区域的触觉信号。此时,发送数据生成单元51将上述ID指定信息存储到流报头中。
发送单元F35发送由编码单元F34生成的编码数据。具体地,基于控制单元35A的控制,例如,无线通信单元52将由发送数据生成单元51生成的编码数据发送到外部装置(接收设备40)。
(接收侧的功能配置)
图22是示出接收设备40的功能配置的功能框图。
如图所示,接收设备40包括作为接收单元F41和解码单元F42的功能。
接收单元F41从发送设备接收编码数据,该发送设备通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据。即,在该示例中,接收单元F41接收由发送设备3A的发送数据生成单元51生成的编码数据。在该示例中,无线通信单元43对应于接收单元F41。
解码单元F42根据相应区域的优先级顺序对由接收单元F41接收的编码数据进行解码。在该示例中,作为解码单元F42的功能由解码单元34A实现。
具体地,解码单元F42响应于从具有较高优先级顺序的区域按顺序排列并发送触觉信号的情况,执行下一处理。换句话说,在至少接收到除了具有最低优先级的区域之外的具有最高优先级的区域的触觉信号时,将确认返回发送设备。
作为解码单元F42的功能,对于由发送数据生成单元51生成并由无线通信单元43接收的编码数据,解码单元34A参考存储在编码数据的流报头中的上述参数,确定是否已经接收到根据该参数识别的帧(接收成功),并且在确定已经接收到该帧时将ACK返回发送设备3A侧。
解码单元34A针对每个流重复执行这样的处理。
此外,响应于在对具有高优先级顺序的区域给予冗余之后发送触觉信号的情况,解码单元F42在接收到被给予冗余的区域的触觉信号的至少一个触觉信号时,将确认返回发送设备。
作为解码单元F42的功能,对于由发送数据生成单元51生成并由无线通信单元43接收的编码数据,解码单元34A参考存储在编码数据的流报头中的上述ID指定信息,确定是否已经接收到由ID指定信息指示的多个帧中的至少一个帧(接收成功),并且在确定已经接收到该帧时将ACK返回发送设备3A侧。
解码单元34A针对每个流重复执行这样的处理。
在此处,已经参考图22描述的作为解码单元F42的功能可以被实现为由CPU等执行的软件处理。基于程序来执行软件处理,并且该程序被存储在存储装置中,计算机装置(诸如,CPU)可以从该存储装置中读出程序。
[2-5.第二实施例的结论]
如上所述,根据第二实施例的发送系统包括:发送设备(发送设备3A),该发送设备包括:编码单元(编码单元F34、发送数据生成单元51),其通过根据相应区域的优先级顺序对人体相应区域的触觉信号执行排列编码来生成编码数据;以及发送单元(发送单元F35),其发送编码数据;以及接收设备(接收设备40),接收设备包括:接收单元(接收单元F41、无线通信单元43),其接收由发送单元发送的编码数据;以及解码单元(解码单元F42、34A),其根据优先级顺序对由接收单元接收的编码数据执行解码。
如上所述,例如,通过以对应于优先级顺序的排列发送相应区域的触觉信号,可以使要优先化的区域(诸如,具有高触觉灵敏度的区域)的触觉信号的数据丢失不太可能发生,并且根据优先级顺序进一步对要以这种方式发送的触觉信号进行解码,即使发生发送路径上的数据丢失,在要优先化的区域的触觉信号中不发生数据丢失,仅接收到的要优先化的区域的触觉信号可以被视为触觉再现的目标。
因此,可以使由发送路径上的数据丢失引起的触觉信号的发送延迟不太可能发生,并且可以防止由发送延迟引起的触觉再现性下降。
此外,根据第二实施例的接收设备(接收设备40)包括:接收单元(接收单元F41、无线通信单元43),其从发送设备(发送设备3A)接收编码数据,该发送设备通过根据相应区域的优先级顺序对人体相应区域的触觉信号执行排列编码来生成编码数据;以及解码单元(解码单元F42、34A),其根据优先级顺序对由接收单元接收的编码数据进行解码。
例如,通过发送设备以对应于优先级顺序的排列发送相应区域的触觉信号,可以使要优先化的区域(诸如,具有高触觉灵敏度的区域)的触觉信号的数据丢失不太可能发生,并且根据优先级顺序进一步对要以这种方式发送的触觉信号进行解码,即使发生发送路径上的数据丢失,在要优先化的区域的触觉信号中不发生数据丢失,仅接收到的要优先化的区域的触觉信号可以被视为触觉再现的目标。
因此,可以使由发送路径上的数据丢失引起的触觉信号的发送延迟不太可能发生,并且可以防止由发送延迟引起的触觉再现性下降。
此外,在根据第二实施例的接收设备中,相应区域的触觉信号是具有人体的不同触觉特性的相应区域的触觉信号。
因此,可以针对具有不同触觉特性的每个区域执行触觉再现。
因此,可以执行适合于每个区域的触觉特性的适当的触觉再现。
此外,在根据第二实施例的接收设备中,发送设备从具有较高优先级顺序的区域发送按顺序排列的触觉信号,并且解码单元在至少接收到除了具有最低优先级顺序的区域之外的具有最高优先级顺序的区域的触觉信号时,将确认返回发送设备。
因此,具有高优先级顺序的区域的触觉信号变得等同于使用短分组发送信号。
因此,对于具有高优先级的区域,可以降低触觉信号的数据丢失的发生率,并且可以防止触觉再现性下降。
此外,在根据第二实施例的接收设备中,优先级顺序是基于触觉刺激的可感知性的优先级顺序。
因此,例如,对于具有基于触觉刺激的可感知性(诸如,触觉灵敏度的高度和信号振幅的大小)的高优先级的区域,可以使触觉信号的数据丢失不太可能发生。
因此,可以防止触觉再现性下降。
此外,在根据第二实施例的接收设备中,优先级顺序是基于触觉灵敏度的高度的优先级顺序。
因此,对于从对触觉刺激的灵敏度方面容易感知触觉刺激的区域,可以使触觉信号的数据丢失不太可能发生。
因此,可以防止触觉再现性下降。
此外,在根据第二实施例的接收设备中,优先级顺序是基于触觉信号的振幅的大小的优先级顺序。
因此,对于从触觉信号的振幅的大小方面容易感知触觉刺激的区域,可以使触觉信号的数据丢失不太可能发生。
因此,可以防止触觉再现性下降。
此外,在根据第二实施例的接收设备中,发送设备在对具有高优先级顺序的区域给予冗余之后发送触觉信号,并且解码单元在接收到被给予冗余的区域的触觉信号的至少一个触觉信号时,将确认返回发送设备。
因此,可以使触觉信号的数据丢失不太可能发生。
因此,可以防止触觉再现性下降。
此外,根据第二实施例的解码方法是根据优先级顺序对从发送设备接收的编码数据执行解码的解码方法,该发送设备通过根据相应区域的优先级顺序对人体相应区域的触觉信号执行排列编码来生成编码数据。
而且,根据基于第二实施例的这样的解码方法,可以获得与根据第二实施例的上述接收设备的功能和效果类似的功能和效果。
此外,根据第二实施例的程序是用于使信息处理设备实现根据优先级顺序对从发送设备接收的编码数据执行解码的功能的程序,该发送设备通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据。
根据这样的程序,可以实现根据第二实施例的上述接收设备。
注意,本说明书中描述的效果仅是示例并且不受限制,并且可能引起其他效果。
<3.本技术>
注意,本技术也可以采用以下配置。
(1)
一种解码设备,包括:
解码单元,其被配置为对在人体的不同区域之间使用不同的数据格式编码的触觉信号进行解码。
(2)
根据上述(1)的解码设备,
其中,解码单元对在具有人体的不同触觉特性的区域之间具有不同的数据格式的触觉信号进行解码。
(3)
根据上述(1)或(2)的解码设备,
其中,解码单元对触觉信号进行解码,该触觉信号具有以根据触觉灵敏度改变对区域的位分布的方式定义的相应区域的数据格式。
(4)
根据上述(3)的解码设备,
其中,解码单元对在不同区域之间具有不同量化位长度的触觉信号进行解码。
(5)
根据上述(3)或(4)的解码设备,
其中,解码单元对在不同区域之间具有不同采样频率的触觉信号进行解码。
(6)
根据上述(1)至(5)中任一项的解码设备,
其中,解码单元包括格式转换单元,该格式转换单元被配置为输入在不同区域之间量化位长度和采样频率中的至少一个不同的触觉信号,并且转换相应区域的触觉信号中的至少任一个触觉信号的量化位长度和采样频率中的至少任一个。
(7)
根据上述(1)至(6)中任一项的解码设备,
其中,解码单元输入添加有指示区域的类型的索引信息的触觉信号,并且基于该索引信息对相应区域的触觉信号执行解码。
(8)
一种接收设备,包括:
接收单元,其被配置为从发送设备接收编码数据,该发送设备被配置为通过根据相应区域的优先级顺序对人体的相应区域的触觉信号执行排列编码来生成编码数据;以及
解码单元,其被配置为根据优先级顺序对由接收单元接收的编码数据执行解码。
(9)
根据上述(8)的接收设备,
其中,相应区域的触觉信号是具有人体的不同触觉特性的相应区域的触觉信号。
(10)
根据上述(8)或(9)的接收设备,
其中,发送设备从具有较高优先级顺序的区域发送按顺序排列的触觉信号,并且
解码单元在至少接收到除了具有最低优先级顺序的区域之外的具有最高优先级顺序的区域的触觉信号时,将确认返回发送设备。
(11)
根据上述(10)的接收设备,
其中,优先级顺序是基于触觉灵敏度的高度的优先级顺序。
(12)
根据上述(8)至(11)中任一项的接收设备,
其中,发送设备在对具有高优先级顺序的区域给予冗余之后发送触觉信号,并且
解码单元在接收到被给予冗余的区域的触觉信号中的至少一个触觉信号时,将确认返回发送设备。
参考标记列表
1、1A 触觉再现系统
2 编码设备
3 解码设备
3A 发送设备
5 触觉传感器
6 触觉呈现设备
22 A/D转换器
24 编码单元
F21 获取单元
F22 编码单元
32 D/A转换器
34、34A 解码单元
35、35A 控制单元
37 通信单元
F31 获取单元
F32 再现单元
F23、F33 格式转换单元
F34 编码单元
F35 发送单元
40 接收设备
43 无线通信单元
51 发送数据发送单元
52 无线通信单元
F41 接收单元
F42 解码单元。
- 编码设备、编码方法、解码设备、解码方法、发送系统、接收设备和程序
- 预编码方法、解码方法、发送设备和接收设备