一种智能护理床
文献发布时间:2023-06-19 10:35:20
技术领域
本发明属于医疗和护理设备技术领域,特别涉及一种智能护理床。
背景技术
目前,无论在医院还是家中对患者进行护理过程中,不可避免的经常需要将卧床人员进行空间上的转移;但是申请人发现:现有通常采用把卧床人员由床抱到轮椅上,在由轮椅完成空间移动的任务后,又由轮椅抱到床上;而在对卧床人员进行洗浴时,同样需要护理人员将卧床人员抱到洗浴床上,之后又需要护理人员将卧床人员抱到护理床;这样不仅对医护人员和护理人员体力是极大的考验,劳动强度极大,同时还造成一定的安全隐患,尤其是刚做完手术不久或者是身体需要保持相对稳定的病人,难度都非常大,即便是通过机械搬运的方式搬运患者也无法完全解决上述问题,在搬运过程还是需要人功将卧床人员搬到转移机构上,这一过程依然存在上述缺陷。
发明内容
为解决现有技术中存在的上述问题,本发明提供了一种可实现人体在护理床和其它设备之间的转移,使用灵活方便,操作简单、轻松,有效减少护理人员数量,降低护理强度,转移安全、稳定、可靠,舒适度高,且结构简单,生产加工容易,成本低的智能护理床。
为解决上述技术问题,本发明采用如下技术方案:
一种智能护理床,包括
护理床,其床面具有若干可供转移装置的机械臂插入的间隙;
转移装置,包括主体和若干机械臂;其中所述主体的前端和后端分别通过平移轨道组件可横向平移地安装在护理床的前端和后端上;所述机械臂是卷绕在主体内的链条式机械臂,且所述机械臂在工作时可水平向前伸出、插入护理床的间隙内,将护理床上的人体抬起、转移。
进一步地,所述主体内具有若干个间隔设置的转盘式可卷曲伸缩的柔性机械臂,包括外壳、转盘、电机和机械臂;其中,所述外壳与主体固定连接,所述转盘是圆形转盘或多边形转盘,所述转盘可转动地安装在外壳内,所述电机安装在外壳上并与转盘驱动连接,所述机械臂卷绕在转盘上,而且所述机械臂的内端与转盘转动连接,外端水平向前。
进一步地,所述机械臂由多节机械臂单体组成,相邻两节所述机械臂单体的首尾两端可向上转动地连接一体。
进一步地,所述机械臂单体的前后两端分别设有水平设置的下连接部和上连接部,而且相邻两节所述机械臂单体的下连接部和上连接部上下匹配搭接一起,所述上连接部的端部与下连接部的机械臂单体转动连接。
进一步地,所述机械臂位于最外端的一节机械臂单体的前端设有导向轮。
优选地,所述柔性机械臂机构还包括有齿轮盘,所述齿轮盘安装在转盘的转轴上并与转盘同轴心,所述电机的驱动轴上安装有驱动齿轮,所述驱动齿轮与齿轮盘啮合连接。
进一步地,所述电机的驱动轴上安装有主动带轮,所述柔性机械臂机构上设有同轴的从动带轮和从动齿轮,所述主动带轮通过传动带与从动带轮驱动连接,所述从动齿轮与齿轮盘啮合连接。
优选地,所述护理床的床面具有若干独立升降活动块,当所述升降活动块升起和/或下降后在床面形成可供转移装置的机械臂插入的间隙。
优选地,所述护理床的床板由多段床板单元组成,多段所床板单元通过活动铰链依次连接,而且所述床板的底部设有坐姿调整驱动机构,驱使各段床板单元向上或向下转动,实现床板的坐姿调整。
进一步地,所述护理床包括有床架,所述坐姿调整驱机构包括第一驱动器和第二驱动器,所述第一驱动器和第二驱动器转动地安装在床架上,而且所述第一驱动器的驱动部与床板的位于前端一段床板单元驱动连接,所述第二驱动器的驱动部靠近床板后端的一段床板单元驱动连接,同时所述床板位于后端的一段床板单元与床架转动连接。
本发明的有益效果:
本发明通过上述技术方案,即可实现人体在护理床和其它设备之间的转移,使用灵活方便,操作简单、轻松,有效减少护理人员数量,降低护理强度,为自动化转移奠定了基础,同时转移安全、稳定、可靠高,而且护理床的透气性极好,舒适度高,还有效避免因长期卧床而导致人体出现褥疮的问题,该护理床的结构简单,生产加工容易,成本低,有利于大批量生产和推广普及使用,让更多患者受惠,解决医护人员和护理人员的一大难题。
附图说明
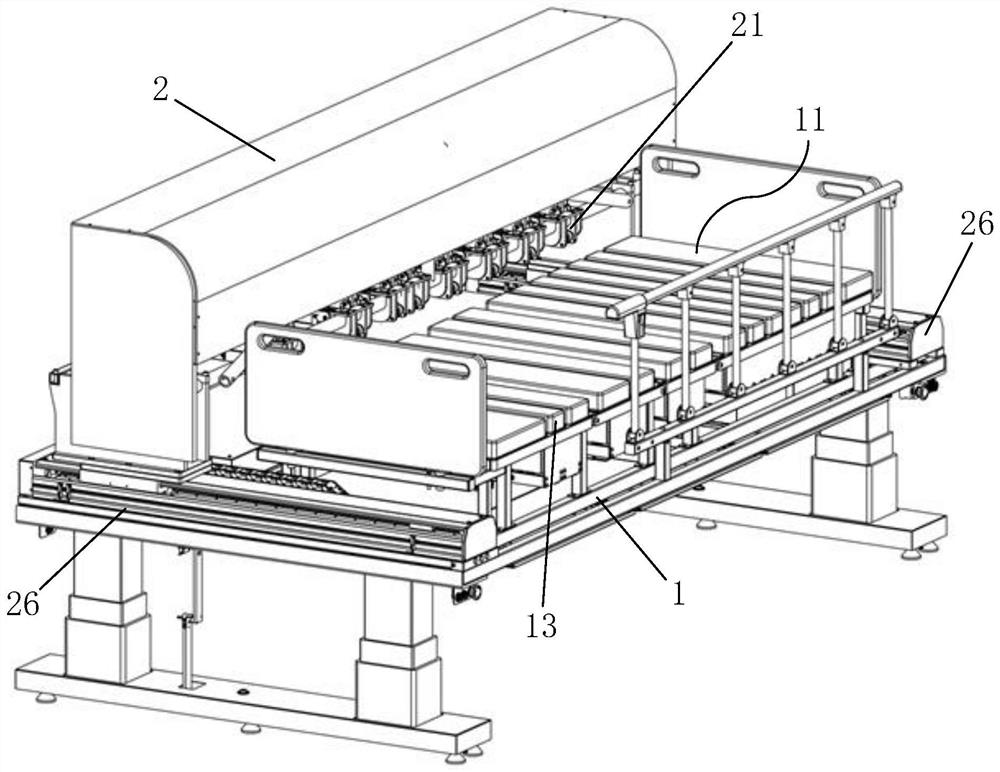
图1是本发明实施例所述一种智能护理床的结构示意图;
图2是本发明实施例所述一种智能护理床中护理床进行坐姿调的结构示意图;
图3是本发明实施例所述一种智能护理床中转移装置的结构示意图;
图4是本发明实施例所述一种智能护理床中转盘式可卷曲伸缩的柔性机械臂的结构示意图;
图5是本发明实施例所述一种智能护理床中平移轨道组件的结构示意图;
图6是本发明实施例所述一种智能护理床将人体抬起的结构示意图;
图7是本发明实施例所述一种智能护理床将人体抬起平移的结构示意图。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
如图1至图7中所示:
本发明实施例提供的所述智能护理床包括有护理床1和转移装置2。其中,
所述护理床1的床面11具有若干可供转移装置2的机械臂2)插入的间隙12;具体结构可以为:所述护理床1的床面11具有若干独立升降活动块13,当所述升降活动块13升起或下降后在床面11形成可供转移装置2的机械臂21插入的间隙12(所述护理床1床面11的升降活动块13也可以部分升起和部分下降、在床面11形成可供转移装置2的机械臂21插入的间隙12,而且若干独立升降活动块13也可以采用间隔设置,还可以采用阵列并排设置,当然所述护理床1也可以是专利申请号为CN201910863309.6的一种栅格结构的护理床中公开的任何一种结构。)。
所述转移装置2包括主体22和若干机械臂21,所述主体22的前端和后端分别通过平移轨道组件26可横向平移地安装在护理床1的前端和后端上;所述机械臂21是卷绕在主体22内的链条式机械臂。具体结构可以为:如图5,平移轨道组件26包括电机261(如步进电机)、丝杆双滑轨模组262、滑台263和限位感应器264,所述电机261和丝杆双滑轨模组262安装在护理床1上,所述电机261可以是步进电机(如86步进电机),并与丝杆双滑轨模组262的丝杆驱动连接,所述滑台263可沿平移轨道组件26的长度方向滑动地安装在丝杆双滑轨模组262上、并与丝杆双滑轨模组262的丝杆传动连接;所述丝杆双滑轨模组262属于现有技术,在此不再详细赘述;所述限位感应器264安装在丝杆双滑轨模组262,由挡片及传感器组,用于限定有效的移动位置。所述主体22的前端和后端分别通过平移轨道组件26可横向平移地安装在护理床1的前端和后端上;所述主体22内具有若干个间隔设置的转盘式可卷曲伸缩的柔性机械臂,包括外壳23、转盘24、电机25和机械臂21;其中,所述外壳23与主体22固定连接,所述转盘24是圆形转盘或多边形转盘,所述转盘24可转动地安装在外壳23内,所述电机25安装在外壳23上并与转盘24驱动连接,所述机械臂21卷绕在转盘24上,而且所述机械臂21的内端与转盘24转动连接,外端水平向前;如图3,所述柔性机械臂机构还包括有齿轮盘27,所述齿轮盘27安装在转盘24的转轴上并与转盘24同轴心,所述电机25的驱动轴上安装有驱动齿轮28,所述驱动齿轮28与齿轮盘27啮合连接(当然所述电机25的驱动轴上安装有主动带轮,所述柔性机械臂机构上设有同轴的从动带轮和从动齿轮,所述主动带轮通过传动带与从动带轮驱动连接,所述从动齿轮与齿轮盘27啮合连接);所述机械臂21由多节机械臂单体组成,相邻两节所述机械臂单体的首尾两端可向上转动地连接一体,如图4,所述机械臂单体的前后两端分别设有水平设置的下连接部29和上连接部20,而且相邻两节所述机械臂单体的下连接部29和上连接部20上下匹配搭接一起,所述上连接部20的端部与下连接部29的机械臂单体转动连接。
如图6和7所示,本发明所述智能护理床工作时,所述转移装置2的机械臂21水平向前伸出、插入护理床1的间隙12内,以将人体抬起、实现人体转移。具体可以为:首先所述护理床1的床面11的升降活动块13升起或下降,在床面11形成可供转移装置2的机械臂21插入的间隙12;然后转移装置2的机械臂21的外端水平向前伸出、插入护理床1的间隙12内,并将护理床1的人体抬起、转移其它设备上;反之操作,实现人体从其它设备转移至护理床1上。
这样,通过本发明所述智能护理床即可实现人体在护理床1和其它设备之间的转移,使用灵活方便,操作简单、轻松,有效减少护理人员数量,降低护理强度,上升高度小,重心较低,即便由患者自动操作控制也不会有心理压力,舒适度高,也为自动化转移奠定了基础,同时转移安全、稳定、可靠高,特别适用于刚做完手术不久或者是身体需要保持相对稳定的病人以及失去活动能力的被护理人员(比如:年迈的卧床老人),同时避免了传统机械式搬动造成二次损伤(如:着床、摔跤)的风险,有效扩大安全活动范围,而且护理床1的透气性极好,舒适度高,还有效避免因长期卧床而导致人体出现褥疮的问题,该护理床的结构简单,生产加工容易,成本低,有利于大批量生产和推广普及使用,让更多患者受惠,解决医护人员和护理人员的一大难题。
此外,如图4,所述机械臂21位于最外端的一节机械臂单体的前端设有导向轮211,有效增强链条式机械臂6在水平伸出、收纳的流畅性。
如图2所示,所述护理床1的床板14由多段床板单元组成,多段所床板单元通过活动铰链依次连接,而且所述床板14的底部设有坐姿调整驱机构,驱使各段床板单元向上或向下转动,实现床板14的坐姿调整。具体结构可以为:所述护理床1包括有床架15,所述坐姿调整驱机构包括第一驱动器16和第二驱动器17,所述第一驱动器16和第二驱动器17转动地安装在床架15上,而且所述第一驱动器16的驱动部161与床板14的位于前端一段床板单元驱动连接,所述第二驱动器17的驱动部171与靠近床板14后端的一段床板单元驱动连接,同时所述床板14位于后端的一段床板单元与床架15转动连接(如图2,所述床板14由背板141、固定板142、大腿板143和小腿板144组成,所述背板141、固定板142、大腿板143和小腿板144从前到后依次转动连接,所述第一驱动器16的驱动部161和第二驱动器17的驱动部171分别与背板141和大腿板143驱动连接)。这样,发明所述智能护理床的护理床1即可实现坐姿调整,以便卧床人员日常护理和看电视、上网、吃饭等日常活动,而且护理床1的独立升降活动块在交替升降时可达到按摩功能,同时还能有效避免因长期卧床而导致人体出现褥疮的问题。
当然,本发明所述智能护理床的护理床1也可以具有垂直升降运动功能,以实现转移装置2将人体在护理床1和其它设备之间转移时的高度调整。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
- 一种机器人护理床中实现护理床背板和智能轮椅背板同步升降的同步系统和同步方法
- 适用于护理床的马桶以及多功能智能护理床