曝光装置以及物品制造方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及曝光装置以及物品制造方法。
背景技术
已知用于测量曝光装置的投影光学系统的成像特性(例如失真(distortion)、焦点位置等)的几个方法。在专利文献1中,记载了曝光装置的投影光学系统的失真的测量方法。参照图8,说明专利文献1记载的测量方法。首先,通过曝光对涂敷有感光材料的基板100重叠转印第1标志101和第2标志102,使该感光材料显影。由此,在基板100上形成与第1标志101对应的标志和与第2标志102对应的标志。之后,通过使用显微镜测量与第1标志101对应的标志和与第2标志102对应的标志的偏移量,并求解用测量结果制作的连立方程式,能够得到投影光学系统的失真。根据该方法,能够去除载置台的驱动误差的影响,高精度地求出失真。
在专利文献2中,记载不使晶片曝光而测量投影光学系统的成像特性(失真、焦点位置等)的方法。参照图9,说明专利文献2记载的测量方法。在专利文献2记载的测量方法中,如图9的(a)所示,通过中间掩模载置台110保持具有狭缝状的第1标志113的中间掩模112,将具有狭缝状的第2标志116的图案板117配置到晶片载置台111。然后,将曝光光114照射到第1标志113,将通过第1标志113后的曝光光114经由投影光学系统115照射到第2标志116,将通过第2标志116后的曝光光114用光电传感器118受光。在该状态下,将晶片载置台111在投影光学系统115的光轴方向(Z方向)、或者与光轴正交的方向(X/Y方向)上驱动。由此,如图9的(b)所示,得到晶片载置台111的位置和光电传感器118的输出(光量)的关系。例如,通过一边在光轴方向上驱动晶片载置台111一边用光电传感器118对曝光光进行受光,能够将光量最大时的晶片载置台111的位置求出为焦点位置。另外,通过一边在与光轴正交的方向上驱动晶片载置台111一边用光电传感器118对曝光光进行受光,能够求出与投影光学系统正交的方向上的第1标志113的成像位置(X/Y位置)。通过关于掩模上的多个第1标志113进行这样的测量,无需进行晶片的曝光以及显影,而能够求出投影光学系统的成像特性。进而,在专利文献2中,如图10所示,记载了在图案板120中配置大量的第2标志123以及大量的光电传感器121,同时进行多个位置处的成像特性的测量。
现有技术文献
专利文献
专利文献1:日本特开2004-63905号公报
专利文献2:日本特开平8-227847号公报
发明内容
然而,在专利文献1的方法中,需要准备涂敷有感光材料的基板,在进行曝光、显影之后使用显微镜进行测量。因此,在专利文献1的方法中,在曝光以及显影中花费相应的时间,所以不适用于定期的测量。另外,为了进行涂敷以及显影,需要曝光装置以外的设备。在专利文献2的方法中,在光电传感器仅有1个的情况下,测量结果受到晶片载置台的驱动误差的影响。另外,在晶片载置台上配置大量的光电传感器时,使晶片载置台大型化或者使成本增大。
本发明提供无需进行曝光以及显影,而有利于低成本且高精度地测量投影光学系统的成像特性的技术。
本发明的1个侧面涉及一种曝光装置,具有:照明系统,对配置于被照明面的掩模进行照明;投影光学系统,将所述掩模的像投影到基板;以及基板载置台,支承所述基板,所述曝光装置具备:传感器,搭载于所述基板载置台;以及控制部,控制所述传感器,所述控制部实施多次检测处理,该检测处理是使用所述传感器检测从配置于所述被照明面的多个标志选择的至少2个标志的成像位置的处理,在所述检测处理与所述检测处理之间,实施使搭载有所述传感器的所述基板载置台移动的移动处理。以使在所述移动处理之前的所述检测处理中从所述多个标志选择的至少2个标志的一部分和在所述移动处理之后的所述检测处理中从所述多个标志选择的至少2个标志的一部分共同的方式,实施所述移动处理中的所述基板载置台的移动。
根据本发明,提供无需进行曝光以及显影,而有利于低成本且高精度地测量投影光学系统的成像特性的技术。
附图说明
图1是示出第1实施方式的曝光装置的结构的图。
图2是例示标志的图。
图3是用于说明第1实施方式的测量方法的图。
图4是例示光电变换部的输出和基板载置台的位置的关系的图。
图5是用于说明依照第1实施方式的测量方法的其他例子的图。
图6是示出第2实施方式的曝光装置的结构的图。
图7是示意地示出第2实施方式的曝光装置的影像传感器的输出的图。
图8是用于说明以往的曝光装置的图(专利文献1)。
图9是用于说明以往的曝光装置的图(专利文献2)。
图10是用于说明以往的曝光装置的图(专利文献2)。
(符号说明)
EX:曝光装置;IL:照明系统;206:基板载置台;SE:传感器;232:控制部。
具体实施方式
以下,参照附图,详细说明实施方式。此外,以下的实施方式不限定权利要求书所涉及的发明。在实施方式中记载了多个特征,但这些多个特征未必在发明中全部必需,另外,多个特征也可以任意地组合。进而,在附图中,对同一或者同样的结构附加同一参照编号,省略重复的说明。
在图1中,示出第1实施方式的曝光装置EX的结构。第1实施方式的曝光装置EX构成为扫描曝光装置,但本发明所涉及的曝光装置不限定于扫描曝光装置,还能够应用于步进机等。以下,通过将与曝光装置EX的投影光学系统的光轴平行的方向设为Z轴、并将与该光轴正交的平面设为XY平面的XYZ坐标系,说明方向以及姿势。XY平面、X方向以及Y方向还是与投影光学系统的像面平行的方向。
曝光装置EX可以具备照明系统IL、掩模载置台203、投影光学系统204、基板载置台206以及控制部232。照明系统IL通过照明光(曝光光)210,对配置于被照明面(投影光学系统204的物体面)的掩模202进行照明。在构成为扫描曝光装置的曝光装置EX中,照明系统IL对扫描方向(Y方向)上的尺寸比与扫描方向正交的方向(X方向)上的尺寸小的狭缝状的被照明区域进行照明。狭缝状的被照明区域在第1实施方式中是Y方向的尺寸比X方向的尺寸小的矩形区域,但例如也可以是具有圆弧形状等其他形状的区域。照明系统IL例如可以包括光源200、和使用来自光源200的光对掩模202进行照明的照明光学系统201。
掩模载置台203保持掩模202。通过激光干涉仪或者激光标尺等测量器230,测量掩模载置台203的位置以及姿势。控制部232根据目标指令值以及由测量器230测量的测量结果,通过PID运算等,产生用于控制掩模载置台驱动机构231的控制信号。掩模载置台驱动机构231依照该驱动信号驱动掩模载置台203,控制掩模载置台203的位置以及姿势。由此,驱动掩模202。掩模202的驱动包括为了扫描曝光而在扫描方向(Y方向)上扫描掩模202的驱动。掩模载置台203的位置可以包括X方向、Y方向以及Z方向的位置。掩模载置台203的姿势可以包括θ(绕Z轴的旋转)、俯仰(pitch)(绕X轴的旋转)以及翻滚(roll)(绕Y轴的旋转)。
基板载置台206具有保持基板205的基板卡盘207。基板卡盘207例如可以通过真空吸引保持基板205。通过激光干涉仪或者激光标尺等测量器270,测量基板载置台206的位置以及姿势。控制部232根据目标指令值以及由测量器270测量的测量结果,通过PID运算等,产生用于控制基板载置台驱动机构271的控制信号。基板载置台驱动机构271依照该驱动信号,驱动基板载置台206,控制基板载置台206的位置以及姿势。由此,基板205被驱动。基板205的驱动包括为了扫描曝光而在扫描方向(Y方向)上扫描基板205的驱动。基板载置台206的位置可以包括X方向、Y方向以及Z方向的位置。基板载置台206的姿势可以包括θ(绕Z轴的旋转)、俯仰(绕X轴的旋转)以及翻滚(绕Y轴的旋转)。
投影光学系统204将掩模202中的被照明区域的像投影到基板205。在扫描曝光中,针对被照明区域在扫描方向(Y方向)上扫描掩模202,与其同步地还在扫描方向(Y方向)上扫描基板205。因此,通过扫描曝光,将掩模202的图案区域的全部区域的像转印到基板205的感光材料。控制部232例如可以通过FPGA(Field Programmable Gate Array(可编程门阵列)的简称)等PLD(Programmable Logic Device(可编程逻辑器件)的简称)、或者ASIC(Application Specific Integrated Circuit(专用集成电路)的简称。)、或者嵌入了程序的通用或者专用的计算机、或者它们的全部或者一部分的组合构成。
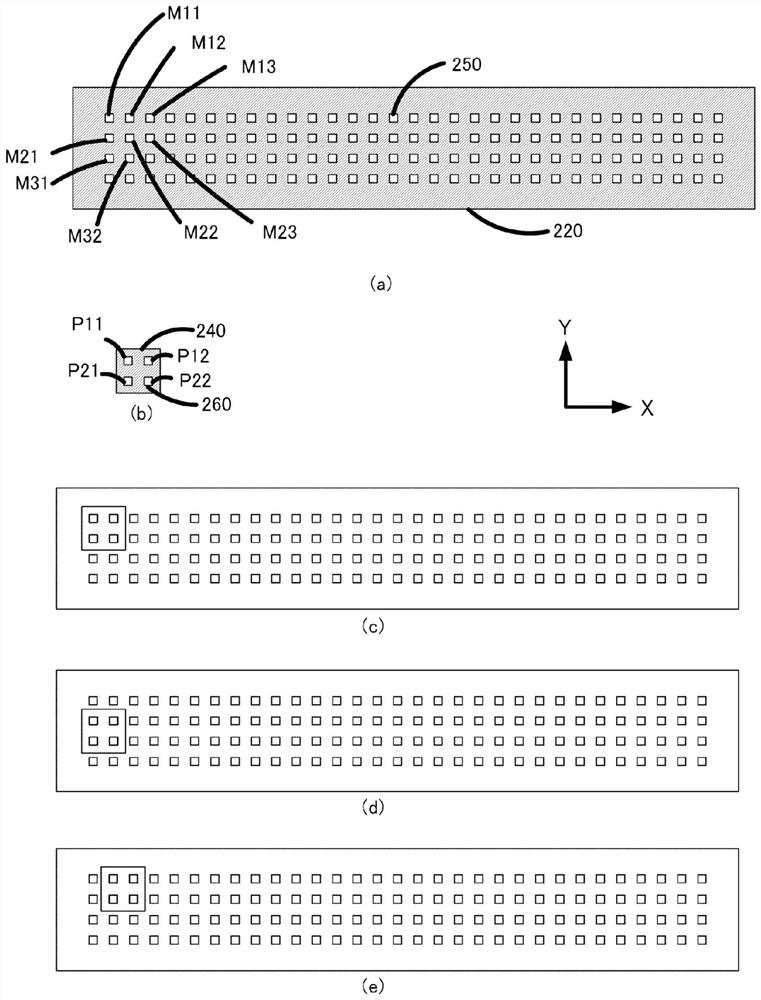
接下来,说明用于测量投影光学系统204的成像特性的系统。掩模202如图2的(b)例示,可以具有第1标志群220。第1标志群220可以包括多个第1标志250。多个第1标志250可以具有相互相同的形状。多个第1标志250可以以预定的排列间距排列。各第1标志250如图2的(a)例示,可以包括X方向尺寸大于Y方向尺寸的狭缝标志(以下称为H标志)251、和Y方向尺寸大于X方向尺寸的狭缝标志(以下称为V标志)252。H标志251是用于测量与Y方向有关的成像特性(失真)的子标志,可以还理解为在X方向上延伸的子标志。V标志252是用于测量与X方向有关的成像特性的子标志,可以还理解为在Y方向上延伸的子标志。X方向可以理解为第1方向,Y方向可以理解为与第1方向交叉的第2方向。在图2中,附加斜线的区域是切断光的遮光膜。第1标志群220可以配置成覆盖或者包含投影光学系统204的物体面中的检查区域。该检查区域可以是被照明区域,在该情况下,多个第1标志250配置于被照明区域。
在图2的(b)的例子中,检查区域是X方向尺寸为750[mm]、Y方向尺寸为75[mm]的矩形区域,第1标志250的排列间距可以为25[mm]。X方向的排列间距和Y方向的排列间距也可以相互不同,但在图2的(b)的例子中相互相同。在图2的(b)的例子中,Y方向的排列数是4,X方向的排列数是31,合计排列有124个第1标志250。排列间距以及第1标志250的个数等的规格可任意地决定。第1标志群220既可以设置于用于使基板205曝光的掩模202,也可以设置于与用于使基板205曝光的掩模202不同的掩模(测量掩模),还可以设置于掩模载置台203。第1标志群220例如可以通过将被图案化的遮光材料设置到玻璃板来制造。
曝光装置EX可以还具备搭载于基板载置台206的传感器SE。传感器SE可以配置于与基板卡盘207不同的区域。传感器SE如图2的(c)、(d)例示,可以包括具有多个第2标志(开口)260的板241,该多个第2标志(开口)260具有与多个第1标志250各自的形状相似的形状。另外,传感器SE可以包括检测通过多个第2标志(开口)260后的光束的多个光电变换部242。多个第2标志260构成第2标志群240。板241可以配置成其表面的高度(Z方向的位置)与投影光学系统204的设计上的像面一致。各第2标志260如图2的(c)例示,可以包括X方向尺寸大于Y方向尺寸的狭缝标志(以下称为H标志)261、和Y方向尺寸大于X方向尺寸的狭缝标志(以下称为V标志)262。H标志261是用于测量与Y方向有关的成像特性(失真)的子标志,可以还理解为在X方向上延伸的子标志。V标志262是用于测量与X方向有关的成像特性的标志,可以还理解为在Y方向上延伸。
在图2的(d)的例子中,Y方向的排列数是2,X方向的排列数是2,合计排列有4个第2标志260。第2标志260的排列间距根据第1标志250的排列间距和投影光学系统204的倍率决定。在第1实施方式中,投影光学系统204是等倍光学系统,第2标志260的排列间距与第1标志250的排列间距相同、即是25[mm]。投影光学系统204也可以是缩小光学系统或者放大光学系统,在该情况下,根据投影光学系统204的倍率决定第2标志260的排列间距。在第1实施方式中,第2标志群240占有的区域如图2的(d)例示,是对25[mm]加上周边遮光部的程度。因此,第2标志群240占有的区域小于第1标志群220的占有区域(如图2的(b)例示,覆盖750[mm]×75[mm]的区域)。
在各第2标志下,配置有光电变换部242。由各光电变换部242检测的信号被提供给控制部232。控制部232能够将从各光电变换部242提供的信号、和由测量器270测量的基板载置台206的位置信息关联起来取入。
在第1实施方式中,针对H标志261以及V标志262的组,设置有1个光电变换部242。因此,使用H标志261(以及H标志251)的测量、和使用V标志262(以及V标志252)的测量在相互不同的定时实施。第1标志250的H标志251、V标志252、以及第2标志260的H标志261、V标志262的配置可以满足如下的条件。该条件是指,在H标志251和H标志261重叠时,V标志252和V标志262不重叠,在V标志252和V标志262重叠时,H标志251和H标志261不重叠。换言之,该条件是指,在使用H标志251和H标志261进行测量时,V标志252和V标志262不重叠,在使用V标志252和V标志262进行测量时,H标志251和H标志261不重叠。在图2的(e)中,例示在使用V标志252和V标志262进行测量时,H标志251和H标志261不重叠的结构。
在第1实施方式中,为了易于理解,说明了像未被投影光学系统204反转的结构(第1标志250未关于X方向以及Y方向反转而投影到投影光学系统204的像面的结构)。在像被投影光学系统204反转的情况下,第2标志260与图像的反转相匹配地反转。例如,只要是使像在X方向上反转的投影光学系统,则设置在X方向上反转的第2标志。另外,在第1实施方式中,例示了H标志以及V标志的组合,但为了详细了解投影光学系统的特性,例如,也可以追加设置相对扫描曝光中的扫描方向倾斜45度的标志以及倾斜135度的标志。在该情况下,也可以采用仅构成第1标志250的多个标志的1个标志和构成第2标志260的多个标志的1个标志相互重叠的配置。另外,在第1实施方式中,针对构成第2标志260的多个标志设置共同的1个光电变换部,但也可以针对构成第2标志260的多个标志的各个设置个别的光电变换部。在该情况下,能够关于构成第2标志260的多个标志同时进行测量。
接下来,说明投影光学系统204的成像特性(失真)的测量方法。控制部232实施多次检测处理,该检测处理是使用传感器SE检测从配置于被照明面(投影光学系统204物体面)的掩模202的多个第1标志250选择的至少2个第1标志250的成像位置的处理。另外,控制部232在检测处理与检测处理之间,实施使搭载有传感器SE的基板载置台206移动的移动处理。在此,关于移动处理中的基板载置台206的移动,以使在该移动处理之前的检测处理(例如可以理解为第1检测处理)中从多个标志250选择的至少2个标志250的一部分、和在该移动处理之后的检测处理(例如可以理解为第1检测处理之后的第2检测处理)中从多个标志250选择的至少2个标志250的一部分共同的方式实施。
参照图3进行说明。为便于说明,如图3的(a)、(b)所示,针对第1标志250如M11、M12等那样分配编号,另外,针对第2标志260如P11、P12等那样分配编号。首先,控制部232以将掩模202的第1标志群220配置于投影光学系统204的检查区域的方式,控制掩模载置台203的位置。掩模载置台203的位置可以维持至投影光学系统204的成像特性的测量结束。
接下来,控制部232如图3的(c)所示,以使第2标志P11、P12、P21、P22的位置与第1标志M11、M12、M21、M22的成像位置大致一致的方式,控制基板载置台驱动机构271。此时的基板载置台206的驱动目标位置可以成为与第1标志M11、M12、M21、M22的设计上的成像位置有对应于失真的测量范围的距离的偏移的位置。例如,如果失真的测量范围是±10[um],则控制部232将第2标志定位到与设计上的成像位置有10[um]的偏移的位置。
关于基板载置台206的Z方向的位置,如果预先得知投影光学系统204的焦点位置,则控制部232以使第2标志与投影光学系统204的焦点位置一致的方式,控制基板载置台206的位置。在未预先得知投影光学系统204的焦点位置的情况下,控制部232首先以使第2标志与默认的Z位置(例如设计上的焦点位置等)一致的方式,对基板载置台206进行定位。然后,控制部232在执行测量X、Y方向的成像位置的处理之后,执行在第2实施方式中说明的焦点位置(最佳聚焦位置)的测量处理,在将第2标志定位到焦点位置之后,再次执行测量X、Y方向的成像位置的处理即可。即,在未预先得知投影光学系统204的焦点位置的情况下,按照X、Y方向的成像位置的粗测量、焦点位置的测量以及将第2标志定位到焦点位置的定位、X、Y方向的成像位置的精密测量的顺序进行测量。
在第2标志被定位到与设计上的成像位置有10[um]的偏移的位置之后,控制部232执行检测处理。具体而言,控制部232以在被照射照明光210的状态下在Y方向上扫描驱动基板载置台206的方式,控制基板载置台驱动机构271。如果测量范围是±10[um],则扫描驱动的范围是20[um]。例如,以使第2标志位于与设计上的成像位置在负方向上有-10[um]的偏移的位置的方式,对基板载置台206进行定位,之后,在正方向上在+20[um]的扫描范围中扫描驱动基板载置台206即可。在该扫描驱动的期间中,控制部232取入从各光电变换部242提供的信号和从测量器230提供的基板载置台206的位置信息。由此,控制部232能够如图4的(a)例示,得到表示基板载置台206的Y方向的位置Y和光电变换部242的输出的关系的信息。光电变换部242的输出呈现最大值的基板载置台206的Y方向的位置(PSy)是第1标志250(H标志251)的Y方向的成像位置和第2标志260(H标志261)的Y方向的位置一致的基板载置台206的Y方向的位置。
然后,根据使用第1标志M11(第1标志250的H标志251)的检测处理的结果,控制部232能够依照接下来的式子,得到与Y方向有关的测量数据M11y。
M11y=PSy-P11y
在此,将配置于第2标志P11(第2标志260)下的光电变换部242的输出呈现最大值的基板载置台206的Y方向的位置设为PSy,将从基板载置台206的基准位置至第2标志P11的H标志261的Y方向的距离设为P11y。
测量数据M11y(后述式的δy)与第1标志M11的成像位置(后述式的dy1)大致相等。但是,测量数据M11y可能包含基板载置台206的位置误差(后述式的ey、eθ)、第2标志的制造时的位置误差(后述式的dy2)、以及光电变换部242的量化误差(εy)。图4的(a)例示1个光电变换部242的输出,但在第1实施方式中,第2标志群240具有4个第2标志260(以及4个光电变换部242)。因此,控制部232能够通过1次检测处理,关于4个第1标志250、即第1标志M11、M12、M21、M22y,得到测量数据M11y、M12y、M21y、M22y。
与上述同样地,控制部232根据使用第1标志M11(第1标志250的V标志252)的检测处理的结果,依照接下来的式子,得到X方向的测量数据M11x。
M11x=PSx-P11x
在此,将配置于第2标志P11(第2标志260)下的光电变换部242的输出呈现最大值的基板载置台206的X方向的位置设为PSx,将从基板载置台206的基准位置至第2标志P11的V标志262的X方向的距离设为P11x。另外,与M11x同样地,控制部232能够关于其他第1标志M12、M21、M22y,得到M12x、M21x、M22x。关于X方向的测量数据(后述式的δx),也可能包含基板载置台206的位置的误差(ex,eθ)、第2标志的制造时的位置误差(dx2)、以及光电变换部242的量化误差(εx)。
接下来,控制部232如图3的(d)例示,执行以使基板载置台206在Y方向上移动的方式控制基板载置台驱动机构271的移动处理。该移动处理中的基板载置台206的移动距离是作为第1标志250的排列间距的25[mm]。通过这样的基板载置台206的移动处理,第2标志P11、P12、P21、P22与第1标志M21、M22、M31、M32的成像位置大致一致。而且,通过与上述同样的检测处理,控制部232关于第1标志M21、M22、M31、M32得到测量数据。
接下来,控制部232如图3的(e)例示,执行以使基板载置台206在X方向上移动25[mm]的移动距离的方式控制基板载置台驱动机构271的移动处理,之后,执行检测处理。控制部232反复进行如以上的移动处理以及检测处理。检测处理的次数在X/Y方向上都成为“测量点数-1”,所以在第1实施方式中,关于Y方向在3种位置、关于X方向在30种位置,合计在90个部位进行与X、Y方向有关的检测处理。另外,关于1个部位,关于X、Y方向分别得到4个测量数据,所以全部得到90×4×2=720个测量数据。将这些测量数据设为(δx,δy)。
控制部232通过重回归分析,求解关于如以上所述得到的720个测量数据(δx,δy),在以下说明的(数学式1)至(数学式11)中代入第1标志的成像位置而得到的连立方程式。
【式1】
δx(n)=dx1(i)-dx2(j)-ex(l)+Y2(j)eθ(l)+εx(n)…(数学式1)
【式2】
δy(n)=dy1(i)-dy2(j)-ey(l)-x2(j)eθ(l)+εy(n)…(数学式2)
【式3】
【式4】
【式5】
【式6】
【式7】
【式8】
【式9】
【式10】
【式11】
在此,各变量如以下所述定义。
δx(n)、δy(n):第n个测量数据
dx1(i)、dy1(i):第1标志的成像位置
dx2(j)、dy2(j):第2标志的掩模制造上的位置误差
ex(l)、ey(l)、eθ(l):测量时的基板载置台的位置误差
X2(j)、Y2(j):第2标志的位置
εx(n)、εy(n):光电变换部的量化误差
SX(l)、SY(l):测量时的基板载置台的位置
p:配置于掩模的第2标志的数量(在第1实施方式中为4)
q:测量数(在第1实施方式中为90次)。
该连立方程式是一个例子。在上述例子中,将基板载置台206的X、Y方向的正交度、以及驱动倍率设为0来求解,但例如也可以将第2标志的配置的正交度和排列的倍率设为0来求解,方程式可以与状况匹配地任意变更。
第1标志的成像位置dx1、dy1包含第1标志的配置误差,所以如果预先精密地测量第1标志的配置误差,则通过从成像位置减去配置误差,能够更准确地求出投影光学系统的失真。
如以上所述,根据第1实施方式,无需进行曝光以及显影,而能够高精度地测量投影光学系统204的成像特性(失真)。另外,根据第1实施方式,通过使用传感器SE以反复进行移动处理以及检测处理,能够使传感器SE小于检查区域的投影区域(将检查区域通过投影光学系统投影到其像面的区域),这对低成本化有利。
投影光学系统204能够具备调整成像特性(失真)的调整部,能够定期或者在任意的定时测量投影光学系统204的成像特性,根据其结果通过该调整部调整成像特性。
以下,说明第2实施方式。未作为第2实施方式言及的事项可以参照第1实施方式。在第1实施方式中,检测与投影光学系统204的像面平行的方向上的标志的成像位置,但在第2实施方式中,检测与投影光学系统204的光轴平行的方向上的标志的成像位置。在第2实施方式中,一边在Z方向上驱动基板载置台206,一边取得光电变换部的输出。
首先,控制部232以使第1标志250的X、Y方向上的成像位置和第2标志260的X、Y方向上的位置一致的方式,通过基板载置台驱动机构271使基板载置台206定位。此时,基板载置台206的X、Y方向的位置可以决定为第2标志260的X、Y方向的位置与在第1实施方式中测量的第1标志250的X、Y方向的成像位置一致。在此,在由于投影光学系统204的失真等,构成第2标志群240的4个第2标志260未与和它们对应的4个第1标志250的位置一致的情况下,个别地进行检测处理即可。
在X、Y方向的定位结束之后,控制部232执行检测处理。在检测处理中,在第2标志260的X、Y方向的位置与第1标志250的X、Y方向的成像位置一致的状态下,在Z方向上驱动基板载置台206(第2标志260)。由此,在第2标志260中第1标志250的像散焦,通过第2标志260的光量减少。因此,如图4的(b)例示,控制部232能够得到表示基板载置台206的Z方向的位置Z和光电变换部242的输出的关系的信息。光电变换部242的输出呈现最大值的基板载置台206的Z方向的位置(PSz)是第1标志250的Z方向的成像位置和第2标志260的Z方向的位置一致的基板载置台206的Z方向的位置。控制部232得到该PSz作为测量数据。该测量数据(后述式的δz)与第1标志的Z方向的成像位置(dz1)大致相等。但是,可能包含设置有第2标志260的板241的制造上的高度方向的误差(dz2)、基板载置台206的位置误差(ez)、以及光电变换部242的量化误差(εz)。
以下,控制部232与第1实施方式同样地,反复进行使基板载置台206在X方向和/或Y方向上移动的移动处理、和移动处理之后的检测处理。由此,在3×30=90个部位的各个部位得到4个测量数据,所以合计得到360个测量数据。
控制部232通过重回归分析,求解将如以上所述得到的360个测量数据(δz)代入到以下的(数学式21)至(数学式25)而得到的连立方程式。
【式21】
δz(n)=dz1(i)-dz2(j)-ez(l)+εz(n)…(数学式21)
【式22】
【式23】
【式24】
【式25】
在此,各变量如以下所述定义。
δz(n):第n个测量数据
dz1(i):第1标志的成像位置
dz2(j):板的制造上的高度方向的误差
ez(l):测量时的基板载置台的Z方向的位置误差
εz(n):光电变换部的量化误差
SX(l)、SY(l):测量时的基板载置台的位置
p:配置于掩模的第2标志的数量(在第2实施方式中为4个标志)
q:测量数(在第2实施方式中为90次)
在第2实施方式中,构成第2标志群240的第2标志260的个数是4,与其对应地光电变换部242的个数是4,但其仅为一个例子,也可以采用其他个数。例如,能够采用如图5的(a)所示使X方向上的排列数成为3、使Y方向上的排列数成为3的结构。在该情况下,如图5的(b)、(c)、(d)所示那样进行测量,测量次数成为X方向=29次、Y方向=2次,每1次9个数据,能够得到合计522个测量数据。也可以关于基板载置台206的驱动误差,不仅计算Z方向,而且还分离地计算俯仰方向和翻滚方向的误差。另外,也可以与曝光装置的结构以及状况匹配地变更方程式。
另外,在有掩模202的标志面的高度方向的误差的情况下,在计算的焦点位置包含该误差,所以也可以预先测量掩模202的面的高度方向的误差,根据该误差校正计算结果。
如以上所述,根据第2实施方式,无需进行曝光以及显影,而能够高精度地测量投影光学系统204的成像特性(焦点位置)。另外,根据第2实施方式,通过使用传感器SE以反复进行移动处理以及检测处理,能够使传感器SE小于检查区域的投影区域(将检查区域通过投影光学系统投影到其像面的区域),这对低成本化有利。
以下,说明第3实施方式。未作为第3实施方式言及的事项可以参照第1实施方式。在第3实施方式中,不使用作为光量传感器的光电变换部,而使用影像传感器(二维影像传感器)。在图6中,示出第3实施方式的曝光装置EX的结构。在第3实施方式中,代替第2标志群以及光电变换部而设置有影像传感器300。第3实施方式的曝光装置EX可以在其他点与第1实施方式的曝光装置EX相同。
在第3实施方式中,无需在得到如图4的(a)例示的数据的检测处理中使基板载置台206在X方向或者Y方向上移动,所以能够缩短检测处理所需的时间。另外,第3实施方式在如用于评价失真等成像特性的评价点的配置间隔窄的情况等那样,难以采用第1实施方式的情况下也有用。
影像传感器300为了应对标志的排列间距=25[mm],例如可以具有约26[mm]见方以上的有效区域(摄像区域)。也可以向基板载置台206配置光学系统,将使形成于投影光学系统204的像面的第1标志的像缩小或者放大而得到的像形成于影像传感器300的摄像面。影像传感器300的有效区域的尺寸可根据要求规格适宜地变更。为了缩短测量时间,影像传感器300也可以构成为能够同时对更多的标志的像进行摄像。
以下,说明投影光学系统204的失真的测量方法。首先,控制部232以将影像传感器300定位到能够对从多个第1标志250选择的4个第1标志250的成像位置进行摄像的位置的方式,控制基板载置台驱动机构271。影像传感器300生成与在其摄像面成像的第1标志250的光学图像对应的图像数据400,提供给控制部232。在图7的(a)、(b)中示意地示出图像数据400。图像数据400包括4个第1标志250的图像401。第1标志250的图像401包括H标志的图像402以及V标志的图像403。
控制部232通过处理图像数据400,决定第1标志250的X、Y方向的成像位置。图像数据400的处理例如可以包括将光量最大的位置决定为成像位置的处理。此时,在决定X方向的成像位置时,也可以对从V标志的图像403的部分404、405、406分别得到的成像位置进行平均化。另外,在决定Y方向的成像位置时,也可以对从H标志的图像402的部分407、408、409分别得到的成像位置进行平均化。能够关于1个图像数据400的4个部位分别决定X方向的位置以及Y方向的位置,合计能够得到8个测量数据。
控制部232能够依照以下的式子,得到第1标志M11的Y方向的测量数据M11y。
M11y=PSy-ISy+IMGy
在此,将影像传感器300的摄像时的基板载置台206的Y方向的位置设为PSy,将从基板载置台206的基准位置至影像传感器300的中心的距离设为ISy。另外,将处理的结果(从影像传感器300的中心至第1标志M11的H标志的成像位置的距离)设为IMGy。然后,反复进行将第1标志的排列间距(25[mm])作为X、Y方向的移动距离而使基板载置台206移动的移动处理、和之后的检测处理。由此,关于X方向在30种位置、关于Y方向在3种位置,合计在90个部位进行检测处理。关于1个部位,关于X、Y方向分别得到4个测量数据,所以全部得到90×4×2=720个测量数据。
控制部232通过重回归分析,求解关于如以上所述得到的720个测量数据(δx,δy),在第1实施方式中说明的(数学式1)至(数学式11)中代入第1标志的成像位置而得到的连立方程式。
但是,第3实施方式中的以下的变量如以下所述与第1实施方式不同。
dx2(j)、dy2(j):由于影像传感器的歪斜引起的测量误差
X2(j)、Y2(j):设计上的第1标志的成像位置(影像传感器的中心坐标基准)
εx(n)、εy(n):影像传感器的量化误差
根据第3实施方式,无需进行曝光以及显影,而能够高精度地测量投影光学系统204的成像特性(失真)。
以下,说明第4实施方式。未作为第4实施方式言及的事项可以参照第2以及第3实施方式。第4实施方式的曝光装置EX可以具有与第3实施方式的曝光装置EX同样的结构。在第4实施方式中,控制部232以使影像传感器300定位到能够对从多个第1标志250选择的4个第1标志250的成像位置进行摄像的位置的方式,控制基板载置台驱动机构271。接下来,控制部232反复进行向Z方向驱动基板载置台206(影像传感器300)和利用影像传感器300取得图像。在焦点位置(最佳聚焦位置)处通过影像传感器300摄像的图像数据的对比度高,在散焦的位置处通过影像传感器摄像的图像数据的对比度低。因此,控制部232检测通过影像传感器300摄像的图像数据的对比度,得到该对比度最高时的基板载置台206的Z方向的位置,作为测量数据。
以后,控制部232反复进行将第1标志的排列间距(25[mm])作为X、Y方向的移动距离而使基板载置台206移动的移动处理、和之后的检测处理。由此,关于X方向在30种位置、关于Y方向在3种位置,合计在90个部位进行检测处理。关于1个部位得到4个测量数据,所以全部得到360个测量数据。控制部232通过求解根据这些测量数据制作的连立方程式,分离为投影光学系统204的焦点位置、基板载置台206的Z方向的驱动误差、以及影像传感器300的摄像面的高度方向的误差。
在方程式的制作中,能够使用在第2实施方式中说明的(数学式21)至(数学式25)。
但是,第4实施方式中的以下的变量如以下所述与第2实施方式不同。
dz2(j):影像传感器的摄像面的高度方向的误差
εz(n):影像传感器的量化误差
以下,说明使用以上述第1至第4实施方式为代表的曝光装置制造物品的物品制造方法。一个实施方式的物品制造方法例如适合于制造器件(半导体元件、磁存储介质、液晶显示元件等)、滤色片等物品。该制造方法包括:曝光工序,使用上述曝光装置,使涂敷有感光剂的基板曝光;以及显影工序,使在曝光工序中曝光的基板显影。另外,该制造方法可以包括其他公知的工序(氧化、成膜、蒸镀、掺杂、平坦化、蚀刻、抗蚀剂剥离、切割、键合、封装等)。本实施方式中的物品的制造方法相比于以往,在物品的性能、质量、生产率以及生产成本的至少1个中更有利。
发明不限制于上述实施方式,能够不脱离发明的精神以及范围而进行各种变更以及变形。因此,为了公开发明的范围添附权利要求。
- 曝光装置、用于控制曝光装置的方法、以及物品制造方法
- 决定方法、曝光方法、曝光装置以及物品制造方法