一种实现科考吊机多油缸顺序伸缩的控制系统
文献发布时间:2023-06-19 18:34:06
技术领域
本发明涉及一种于科考船用折臂伸缩吊,具体涉及一种实现科考吊机多油缸顺序伸缩的控制系统。
背景技术
科考船用液压折臂伸缩吊主要用于科考船上设备的布放与回收以及货物的吊运。折臂伸缩吊是通过法兰或者焊接到船舶甲板上的,凭借回转、伸缩、变幅、回转和提升等功能,使其具有占用空间小,操作面积大的优势。其中,伸缩臂部分包含N节伸缩臂,由N-1根液压伸缩油缸驱动。
国外同行吊机设计公司设计的液压折臂伸缩吊包含4节伸缩臂,由3节伸缩油缸驱动,3节油缸的A(B)口分别彼此相连。其中,第一节伸缩油缸进出油口安装有平衡阀组,用于避免伸缩油缸因自重出现失控下滑。这样的设计可以实现伸缩油缸的正常伸出和缩回。但有个缺点:由于每个油缸的所受负载不尽相同,所以无法实现伸缩油缸的顺序伸出和缩回。每次首先伸出或者缩回的油缸往往是运动方向所受负载最小的那根油缸,但并非对伸缩臂受力最佳的方案。如果伸缩臂首先伸出强度最弱的一节伸缩臂,有较大概率出现伸缩臂无法吊载额定载荷的情况,并可能发生事故。
发明内容
本发明主要是解决伸缩油缸无法顺序伸缩的技术问题,提出一种实现科考吊机多油缸顺序伸缩的控制系统,可以根据伸缩臂受力情况按照从粗到细顺序伸出,从细到粗顺序缩回的方案,大大改善整个伸缩臂的受力情况,提高吊机的安全稳定性。
为实现上述目的,本发明的技术方案是:一种实现科考吊机多油缸顺序伸缩的控制系统,包含一个手动换向阀,一个控制阀组、三个平衡阀组、三节伸缩油缸和一个长度编码器;所述三组伸缩油缸分别安装在依次嵌套的四节伸缩臂的底座和支架之间,所述控制阀组中的A/B口分别与比例多路阀A/B口连接,控制阀组的四个输出口与三个平衡阀组连接,三个平衡阀组分别连接三节伸缩油缸,所述控制阀组的Ls1~Ls4口与手动换向阀的B口连接,用于控制三节伸缩油缸的顺序动作以及自动与手动两个模式的切换。
进一步,所述位置编码器通过卷筒本体安装在伸缩臂一的侧面,靠近伸缩臂二的位置,并通过挂在伸缩臂四的侧面的焊接支柱上的拉绳末端的拉钩,随伸缩臂一起动作,从位置编码器卷的筒本体中伸出,位置编码器通过记录拉绳的伸长量来确定伸缩臂的伸长量,并转化为电信号输出到控制系统中。
进一步,所述手动换向阀安装在吊机尾部侧面,靠近主臂架与塔身销轴的位置,所述手动换向阀的P、T口分别于液压系统P、T口相连,A口用堵头封死, B口与控制阀组的Ls1~Ls4口首尾相连。
进一步,所述控制阀组安装在主臂架顶部,靠近主臂油缸与主臂架销轴的位置,并由4个电磁换向阀、4个液控换向阀和阀体组成。
进一步,每个所述平衡阀组固定在对应的伸缩油缸的缸筒上部靠近缸筒端耳的位置,所述平衡阀组的A2/B2口采用钢管分别与该伸缩油缸的A/B口连接,所述平衡阀组的L/A1/B1分别与液压系统L口/控制阀组A1/B1口连接,并采用拖链固定液压管路。
本发明的有益效果是:
本发明可以根据伸缩臂受力情况按照从粗到细顺序伸出,从细到粗顺序缩回的方案,大大改善整个伸缩臂的受力情况,提高了吊机的安全稳定性。
附图说明
图1是本发明的实现科考吊机多油缸顺序伸缩的控制系统中的元件安装示意图;
图2是控制阀组示意图;
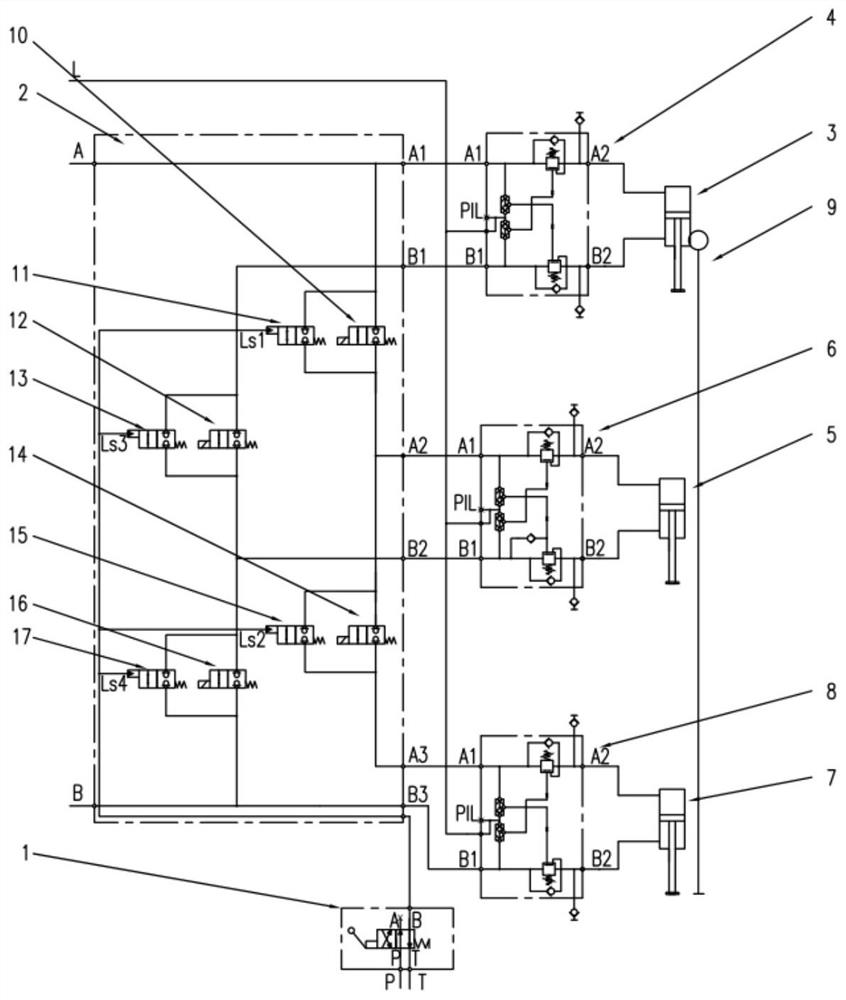
图3是本发明的实现科考吊机多油缸顺序伸缩的控制系统的液压原理图;
图4是伸缩油缸一自动伸出时的液压控制原理图;
图5是伸缩油缸二自动伸出时的液压控制原理图;
图6是伸缩油缸三自动伸出时的液压控制原理图;
图7是伸缩油缸三自动缩回时的液压控制原理图;
图8是伸缩油缸二自动缩回时的液压控制原理图;
图9是伸缩油缸一自动缩回时的液压控制原理图;
图10是三个伸缩油缸按照所受负载由小到大的顺序先后伸出的液压控制原理图;
图11是三个伸缩油缸按照所受负载由小到大的顺序先后缩回的液压控制原理图;
图中:1、手动换向阀;2、控制阀组;3、伸缩油缸一;4、平衡阀组一;5、伸缩油缸二;6、平衡阀组二;7、伸缩油缸三;8、平衡阀组三;9、位置编码器;10、电磁换向阀一;11、液控换向阀一;12、电磁换向阀三;13、液控换向阀三;14、电磁换向阀二;15、液控换向阀二;16、电磁换向阀四;17、液控换向阀四;18、阀体。
具体实施方式
下面结合附图与实施例对本发明作进一步说明。
如图1,2,3所示,本发明的一种实现科考吊机多油缸顺序伸缩的控制系统,包含一个手动换向阀1,一个控制阀组2、三个平衡阀组、三条油缸和一个长度编码器。
手动换向阀1安装在吊机尾部侧面,靠近主臂架与塔身销轴的位置,P、T 口分别于液压系统P、T口相连,A口用堵头封死,B口与控制阀组2的Ls1~Ls4 口首尾相连。手动换向阀1用于控制三节伸缩油缸自动与手动两个伸缩动作模式的切换。
控制阀组2安装在主臂架顶部,靠近主臂油缸与主臂架销轴的位置。主要由4个电磁换向阀、4个液控换向阀和阀体组成。控制阀组A/B口分别与比例多路阀A/B口连接。控制阀组的A1/B1、A2/B2、A3/B3口分别与平衡阀组一4的 A1/B1、平衡阀组二6的A1/B1、平衡阀组三8的A1/B1连接,并采用拖链固定液压管路。控制阀组的Ls1~Ls4口采用钢管首尾相连,并与手动换向阀1的B 口连接。用于控制伸缩油缸的顺序动作。
伸缩机构由四节伸缩臂依次嵌套组成。三组伸缩油缸分别安装在四节伸缩臂的底座和支架之间。其中,伸缩油缸一3的缸筒安装座与伸缩臂一的底座固定,活塞杆的端部与伸缩臂2的支架相连。伸缩油缸一3用于控制伸缩臂2的伸/缩动作。伸缩油缸一5和伸缩油缸三7与伸缩油缸一3类似。
平衡阀组一4固定在伸缩油缸一3缸筒上部靠近缸筒端耳的位置,平衡阀组一4的A2/B2口采用钢管分别与伸缩油缸一3的A/B口连接,平衡阀组一4 的L/A1/B1分别与液压系统L口/控制阀组A1/B1口连接,并采用拖链固定液压管路。平衡阀组1的主要作用:一、实现负负载的平稳下降;二、防止负载出现意料之外的失控现象。平衡阀组二6和平衡阀组三8与平衡阀组一4类似。
位置编码器9卷筒本体安装在伸缩臂一的侧面,靠近伸缩臂二的位置,拉绳末端的拉钩挂在伸缩臂四的侧面的焊接支柱上。当伸缩臂伸出时,拉绳随伸缩臂一起动作,从位置编码器卷筒本体中伸出。编码器通过记录拉绳的伸长量来确定伸缩臂的伸长量,并转化为电信号输出到控制系统中。
本发明主要分电控和手动两种模式。
在电控模式下,根据系统的伸出和缩回命令,可以分别实现三个伸缩油缸按照伸缩油缸一3-伸缩油缸二5-伸缩油缸三7的顺序自动伸出和按照伸缩油缸三7-伸缩油缸二5-伸缩油缸一3的顺序自动缩回。
当系统给伸出命令时,保持电磁换向阀三12和电磁换向阀四16处于激活状态,其他电磁换向阀处于失电状态。压力油通过A口,经平衡阀组一4进入伸缩油缸一3无杆腔。回油从伸缩油缸一3有杆腔,经平衡阀组一4、电磁换向阀三12、电磁换向阀四16和B口回到油箱。平衡阀组一4泄油经L口回到油箱。此时伸缩油缸一3自动伸出,见图4。
当伸缩油缸一3伸出到最大位置时,位置编码器9读取这个信号,保持电磁换向阀一10和电磁换向阀四16处于激活状态,其他电磁换向阀处于失电状态。压力油通过A口,经电磁换向阀一10、平衡阀组二6进入伸缩油缸二5无杆腔。回油从伸缩油缸二5有杆腔,经平衡阀组二6、电磁换向阀四16和B口回到油箱。平衡阀组二6泄油经L口回到油箱。此时伸缩油缸二5自动伸出,见图5。
当伸缩油缸二5伸出到最大位置时,位置编码器9读取这个信号,保持电磁换向阀一10和电磁换向阀二14处于激活状态,其他电磁换向阀处于失电状态。压力油通过A口,经电磁换向阀一10、电磁换向阀二14、平衡阀组三8进入伸缩油缸三7无杆腔。回油从伸缩油缸三7有杆腔,经平衡阀组三8和B口回到油箱。平衡阀组三8泄油经L口回到油箱。此时伸缩油缸三7自动伸出,见图6。
当系统给缩回命令时,保持电磁换向阀一10和电磁换向阀二14处于激活状态,其他电磁换向阀处于失电状态。压力油通过B口,经平衡阀组三8进入伸缩油缸三7有杆腔。回油从伸缩油缸三7无杆腔,经平衡阀组三8、电磁换向阀二14、电磁换向阀一10和A口回到油箱。平衡阀组三8泄油经L口回到油箱。此时伸缩油缸三7自动缩回,见图7。
当伸缩油缸三7缩回到最小位置时,位置编码器9读取这个信号,保持电磁换向阀一10和电磁换向阀四16处于激活状态,其他电磁换向阀处于失电状态。压力油通过B口,经电磁换向阀四16、平衡阀组二6进入伸缩油缸二5有杆腔。回油从伸缩油缸二5无杆腔,经平衡阀组二6、电磁换向阀一10和A口回到油箱。平衡阀组二6泄油经L口回到油箱。此时伸缩油缸二5自动缩回,见附图8。
当伸缩油缸二5缩回到最小位置时,位置编码器9读取这个信号,保持电磁换向阀三12和电磁换向阀四16处于激活状态,其他电磁换向阀处于失电状态。压力油通过B口,经电磁换向阀四16、电磁换向阀三12、平衡阀组一4进入伸缩油缸一3有杆腔。回油从伸缩油缸一3无杆腔,经平衡阀组一4、和A口回到油箱。平衡阀组一4泄油经L口回到油箱。此时伸缩油缸一3自动缩回,见图9。
当电控模式失灵时,可以切换手动模式控制伸缩油缸伸缩。切换手动模式的操作方法是手动控制手动换向阀1换向,并保持不动。此时,压力控制油经手动换向阀1进入液控换向阀一11、液控换向阀二15、液控换向阀三13和液控换向阀17Ls口,所有液控换向阀导通。
当要求伸缩油缸伸出时,压力油经A口,经平衡阀一4、液控换向阀一11、平衡阀二6、液控换向阀二15、平衡阀三8,分别进入伸缩油缸一3、伸缩油缸二5和伸缩油缸三7无杆腔。回油分别从伸缩油缸一3、伸缩油缸二5和伸缩油缸三7 的有杆腔,经平衡阀一4、液控换向阀三13、平衡阀二6、液控换向阀四17、平衡阀三8和B口回到油箱。平衡阀一4、平衡阀二6、平衡阀三8泄油经L口回到油箱。由于三支伸缩油缸所受负载不同,伸缩油缸会按照所受负载由小到大的顺序先后伸出。见图10。
当要求伸缩油缸缩回时,压力油经B口,经平衡阀三8、液控换向阀四17、平衡阀二6、液控换向阀三13、平衡阀一2,分别进入伸缩油缸三7、伸缩油缸二 5和伸缩油缸一3有杆腔。回油分别从伸缩油缸三7、伸缩油缸二5和伸缩油缸一3 的无杆腔,经平衡阀三7、液控换向阀二15、平衡阀二6、液控换向阀一11、平衡阀一4和A口回到油箱。平衡阀一4、平衡阀二6、平衡阀三8泄油经L口回到油箱。由于三支伸缩油缸所受负载不同,伸缩油缸会按照所受负载由小到大的顺序先后缩回,见图11。
手动模式仅在电控模式失灵的情况下使用。当松开手动换向阀1时,即退出手动模式。手动模式下,伸缩油缸无法实现顺序伸出和缩回。伸缩先后顺序和速度大小会根据实际所受负载大小决定。
- 一种能可靠顺序伸缩的油缸、多油缸顺序伸缩机构及工程机械
- 一种能可靠顺序伸缩的油缸、多油缸顺序伸缩机构及工程机械