一种具有三维扫描识别功能的智能一体化喷涂设备
文献发布时间:2023-06-19 09:30:39
技术领域
本发明涉及建筑技术领域,具体为一种具有三维扫描识别功能的智能一体化喷涂设备。
背景技术
建筑物的维护墙主要有内维护墙和外维护墙两种。内、外维护墙又分为现场砌筑粉刷的传统墙、工厂预制的装配式墙体、及现场机械化程度比较高的中空钢网内膜水泥结构墙体。
传统喷浆抹灰需进行冲筋打底,人工手持喷浆机对钢网进行三道喷涂工序,第一道工序:对钢网菱形空洞进行填实处理;第二道工序:对钢网凹槽面进行喷涂找平处理;第三道工序:人工对墙面再次进行找平处理,鉴于此工艺工法对中空钢网内膜墙体进行抹灰所带来的人工及经济效益存在明显不足的缺点。
发明内容
针对现有技术的不足,本发明提供了一种具有三维扫描识别功能的智能一体化喷涂设备,解决了上述背景技术中提出传统喷浆抹灰需进行冲筋打底,人工手持喷浆机对钢网进行三道喷涂工序,第一道工序:对钢网菱形空洞进行填实处理;第二道工序:对钢网凹槽面进行喷涂找平处理;第三道工序:人工对墙面再次进行找平处理,鉴于此工艺工法对中空钢网内膜墙体进行抹灰所带来的人工及经济效益存在明显不足的缺点。
为实现以上目的,本发明通过以下技术方案予以实现:一种具有三维扫描识别功能的智能一体化喷涂设备,包括支撑底架和三维扫描仪,所述支撑底架的内部设置有搅拌设备,且搅拌设备的一侧连接有出料管,所述出料管的一侧连接有泵机,且泵机的一侧连接有连接管,所述搅拌设备的另一侧连接有导水管,且导水管的中部连接有水泵,所述导水管下方的末端连接有储水罐,所述支撑底架上方的左右两侧均安装有纵向位移调节机构,且纵向位移调节机构的上方安装有支柱,所述支撑底架中部的上方安装有角度调节喷涂机构,且角度调节喷涂机构的上方安装有横向位移调节机构,所述三维扫描仪位于角度调节喷涂机构的前端,所述横向位移调节机构的上方安装有调节机械臂,且调节机械臂的一侧连接有磨盘。
可选的,所述搅拌设备包括搅拌罐体、连接主轴、连接电机、进料口、连接导管、喷嘴、滤网板和搅拌臂,所述搅拌罐体的内部设置有连接主轴,且连接主轴上方的末端连接有连接电机,所述搅拌罐体内壁的顶部开设有进料口,所述搅拌罐体的内部设置有连接导管,且连接导管外壁的底部连接有喷嘴,所述连接主轴的中部安装有滤网板,所述连接主轴底部的末端连接有搅拌臂。
可选的,所述搅拌罐体与连接导管之间相连接,且喷嘴沿连接导管的中轴线方向均匀分布,并且连接导管通过导水管和水泵与储水罐构成连通结构,所述搅拌罐体与滤网板之间相连接,且滤网板的内部呈网状体结构。
可选的,所述纵向位移调节机构包括纵向固定架、纵向丝杆轴套柱块、纵向调节丝杆和纵向丝杆电机,所述纵向固定架的内部设置有纵向丝杆轴套柱块,且纵向丝杆轴套柱块的内部贯穿有纵向调节丝杆,并且纵向调节丝杆后端的末端连接有纵向丝杆电机。
可选的,所述纵向调节丝杆贯穿于纵向丝杆轴套柱块的内部,且纵向丝杆轴套柱块与支柱之间为固定连接,并且支柱垂直于纵向调节丝杆的中轴线。
可选的,所述角度调节喷涂机构包括喷料头、喷料枪、定位销、调节液压油缸、工型板、连接机械臂、固定内齿轮和外齿轮,所述喷料头的上方连接有喷料枪,且喷料枪顶部的末端贯穿有定位销,所述喷料枪的一侧连接有调节液压油缸,且调节液压油缸的上方连接有工型板,所述工型板的上方安装有连接机械臂,且连接机械臂的内部设置有伺服电机,所述工型板顶部的内部设置有固定内齿轮,且固定内齿轮的内部设置有外齿轮。
可选的,所述喷料头与喷料枪之间相连接,且喷料枪通过定位销和调节液压油缸与工型板构成旋转结构。
可选的,所述工型板与固定内齿轮之间为固定连接,且工型板通过固定内齿轮和外齿轮与伺服电机构成啮合传动,并且伺服电机与连接机械臂之间为螺纹连接。
可选的,所述横向位移调节机构包括横向固定架、横向丝杆轴套柱块、横向调节丝杆和横向丝杆电机,所述横向固定架的内部设置有横向丝杆轴套柱块,且横向丝杆轴套柱块的内部贯穿有横向调节丝杆,并且横向调节丝杆另一侧的端部连接有横向丝杆电机,所述横向调节丝杆贯穿于横向丝杆轴套柱块的内部,所述横向固定架的中轴线垂直于支柱。
可选的,所述具有三维扫描识别功能的智能一体化喷涂设备的喷涂方法包括以下步骤:
一、场地布置
将智能一体化喷涂设备安排到指定位置,以及将搅拌设备与出料管和连接管,以及喷料枪相连接。
二、喷涂目标特征扫描采样
喷涂作业前,智能一体化喷涂设备利用其三维扫描仪对喷涂目标的不同位面进行扫描采样,测量过程中三维扫描仪的扫描探头可以任意翻转和移动,对物件进行多个视角的测量,系统进行全自动拼接,实现物体360°高精度测量,并且能够在获取表面三维数据的同时,迅速的获取状理信息。
三、图形建模、匹配和预处理
(1)特征提取
通过三维扫描仪录入喷涂目标的采样信息后,从而给定特征集合,提取相同点,分辨不同点,建立的对象特征与特征之间的空间结构关系。
(2)建模
计算机系统接下来运用目前的已建立的目标模型去识别喷涂对象属于哪一位面,并给出边界,将物体与图像的其它部分分割开,对目标每一位面进行建模。
(3)定位
在成功地识别出物体之后,对喷涂目标的喷涂面进行定位,通过计算机系统对已建模的图像进行预分割及生成模型处理,以及对特征包得到的特征进行重构的方法,然后得出的特征的空间分布,从对喷涂目标的凹面与凸面进行精准定位。
四、喷涂作业
通过智能一体化喷涂设备对已配对的喷涂目标进行一体化喷涂作业,由智能一体化喷涂设备控制调用从搅拌设备中把预先搅拌配比好的浆料,依据已扫描录入的墙体位面三维建模以及空间位面的不同,系统严格控制通过纵向位移调节机构、角度调节喷涂机构、横向位移调节机构和移动喷料头的出浆量以及气阀推动的出浆速度对目标不同位面和区域进行差异化喷涂,并有效减少传统喷涂过程中所产生的落地灰,已达到保护施工环境、文明施工的目的。
五、墙体平整作业
喷浆完毕静止一段时间后,智能一体化喷涂设备对以完成喷浆的墙体进行二次扫描采样建模及匹配,以及调节机械臂调节磨盘打磨墙体,直至平滑。
六、场地清理
作业完成后,清理场地转移设备。
本发明提供了一种具有三维扫描识别功能的智能一体化喷涂设备,具备以下有益效果:
1、该具有三维扫描识别功能的智能一体化喷涂设备设置有搅拌设备,水泵能够有效的将储水罐的内部储水沿导水管导入至连接导管的内部,通过喷嘴将水流喷射出,水流能够有效的为搅拌罐体的内部清洗处理,而喷嘴的均匀分布能够有效的增大水流覆盖面积,从而能够有效的提高水流清洗搅拌罐体内部组件的高效性;滤网板能够有效的为物料提供过滤处理,减少物料携带的杂质,保证物料混合的均匀性。
2、该具有三维扫描识别功能的智能一体化喷涂设备设置有纵向位移调节机构,纵向丝杆电机能够有效的通过纵向调节丝杆推动纵向丝杆轴套柱块沿纵向固定架的中轴线方向移动,而纵向丝杆轴套柱块与支柱之间相连接,能够有效的改变支柱的移动距离和位置,可将支柱调节至合适的位置,为设备的喷涂提供有效的辅助定位。
3、该具有三维扫描识别功能的智能一体化喷涂设备设置有角度调节喷涂机构,调节液压油缸能够有效的推动喷料枪沿定位销的外部转动,能够有效的改变喷料枪的转动角度,增强喷料枪的灵活适应性,以及可将喷料枪调节至合适的角度,能够有效的增强设备喷涂的精准性,而伺服电机能够有效的通过固定内齿轮将旋转力施加于外齿轮,而外齿轮与工型板之间相连接,使得外齿轮和工型板之间同步转动,以及能够有效的改变工型板的转动角度,能够有效的改变设备喷涂的方向。
4、该具有三维扫描识别功能的智能一体化喷涂设备设置有横向位移调节机构,横向丝杆电机能够有效的通过横向调节丝杆推动横向丝杆轴套柱块沿横向固定架的中轴线方向移动,横向丝杆轴套柱块与连接机械臂之间相连接,能够有效的改变连接机械臂的移动距离和位置,可将连接机械臂调节至合适的位置,为设备的喷涂提供有效的辅助定位。
附图说明
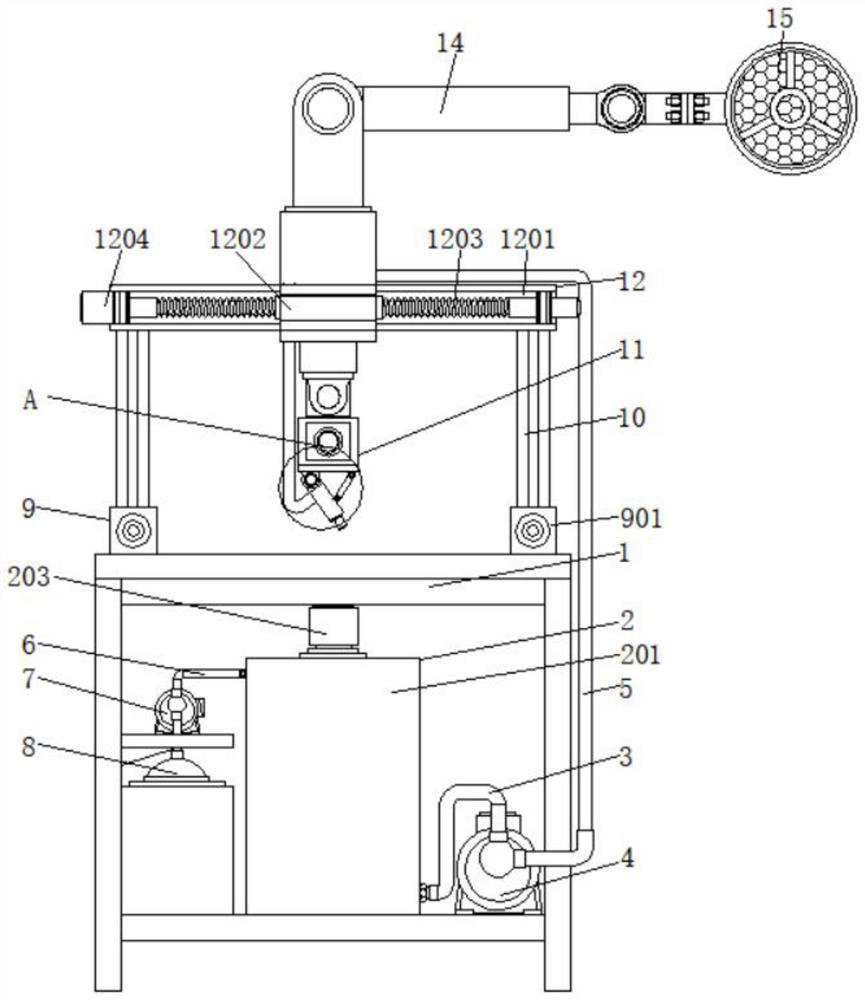
图1为本发明主视结构示意图;
图2为本发明搅拌罐体的内部结构示意图;
图3为本发明滤网板的结构示意图;
图4为本发明纵向位移调节机构的结构示意图;
图5为本发明图1中A处局部放大结构示意图;
图6为本发明连接机械臂的结构示意图;
图7为本发明工型板的结构示意图;
图8为本发明墙体骨架的结构示意图;
图9为本发明喷涂后墙体的结构示意图;
图10为本发明打磨后墙体的结构示意图。
图中:1、支撑底架;2、搅拌设备;201、搅拌罐体;202、连接主轴;203、连接电机;204、进料口;205、连接导管;206、喷嘴;207、滤网板;208、搅拌臂;3、出料管;4、泵机;5、连接管;6、导水管;7、水泵;8、储水罐;9、纵向位移调节机构;901、纵向固定架;902、纵向丝杆轴套柱块;903、纵向调节丝杆;904、纵向丝杆电机;10、支柱;11、角度调节喷涂机构;1101、喷料头;1102、喷料枪;1103、定位销;1104、调节液压油缸;1105、工型板;1106、连接机械臂;1107、固定内齿轮;1108、外齿轮;1109、伺服电机;12、横向位移调节机构;1201、横向固定架;1202、横向丝杆轴套柱块;1203、横向调节丝杆;1204、横向丝杆电机;13、三维扫描仪。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
请参阅图1至图10,本发明提供一种技术方案:一种具有三维扫描识别功能的智能一体化喷涂设备,包括支撑底架1和三维扫描仪13,支撑底架1的内部设置有搅拌设备2,且搅拌设备2的一侧连接有出料管3,出料管3的一侧连接有泵机4,且泵机4的一侧连接有连接管5,搅拌设备2的另一侧连接有导水管6,且导水管6的中部连接有水泵7,导水管6下方的末端连接有储水罐8,支撑底架1上方的左右两侧均安装有纵向位移调节机构9,且纵向位移调节机构9的上方安装有支柱10,支撑底架1中部的上方安装有角度调节喷涂机构11,且角度调节喷涂机构11的上方安装有横向位移调节机构12,三维扫描仪13位于角度调节喷涂机构11的前端,横向位移调节机构12的上方安装有调节机械臂14,且调节机械臂14的一侧连接有磨盘15。
本发明中,进一步地,搅拌设备2包括搅拌罐体201、连接主轴202、连接电机203、进料口204、连接导管205、喷嘴206、滤网板207和搅拌臂208,搅拌罐体201的内部设置有连接主轴202,且连接主轴202上方的末端连接有连接电机203,搅拌罐体201内壁的顶部开设有进料口204,搅拌罐体201的内部设置有连接导管205,且连接导管205外壁的底部连接有喷嘴206,连接主轴202的中部安装有滤网板207,连接主轴202底部的末端连接有搅拌臂208。
进一步地,搅拌罐体201与连接导管205之间相连接,且喷嘴206沿连接导管205的中轴线方向均匀分布,并且连接导管205通过导水管6和水泵7与储水罐8构成连通结构,搅拌罐体201与滤网板207之间相连接,且滤网板207的内部呈网状体结构;在水泵7的作用下,能够有效的将储水罐8的内部储水沿导水管6导入至连接导管205的内部,通过喷嘴206将水流喷射出,水流能够有效的为搅拌罐体201的内部清洗处理,而喷嘴206的均匀分布能够有效的增大水流覆盖面积,从而能够有效的提高水流清洗搅拌罐体201内部组件的高效性;滤网板207能够有效的为物料提供过滤处理,减少物料携带的杂质,保证物料混合的均匀性。
进一步地,纵向位移调节机构9包括纵向固定架901、纵向丝杆轴套柱块902、纵向调节丝杆903和纵向丝杆电机904,纵向固定架901的内部设置有纵向丝杆轴套柱块902,且纵向丝杆轴套柱块902的内部贯穿有纵向调节丝杆903,并且纵向调节丝杆903后端的末端连接有纵向丝杆电机904。
进一步地,纵向调节丝杆903贯穿于纵向丝杆轴套柱块902的内部,且纵向丝杆轴套柱块902与支柱10之间为固定连接,并且支柱10垂直于纵向调节丝杆903的中轴线;在纵向丝杆电机904的作用下,能够有效的通过纵向调节丝杆903推动纵向丝杆轴套柱块902沿纵向固定架901的中轴线方向移动,而纵向丝杆轴套柱块902与支柱10之间相连接,使得纵向丝杆轴套柱块902和支柱10之间同步移动,能够有效的改变支柱10的移动距离和位置,可将支柱10调节至合适的位置,为设备的喷涂提供有效的辅助定位。
进一步地,角度调节喷涂机构11包括喷料头1101、喷料枪1102、定位销1103、调节液压油缸1104、工型板1105、连接机械臂1106、固定内齿轮1107和外齿轮1108,喷料头1101的上方连接有喷料枪1102,且喷料枪1102顶部的末端贯穿有定位销1103,喷料枪1102的一侧连接有调节液压油缸1104,且调节液压油缸1104的上方连接有工型板1105,工型板1105的上方安装有连接机械臂1106,且连接机械臂1106的内部设置有伺服电机1109,工型板1105顶部的内部设置有固定内齿轮1107,且固定内齿轮1107的内部设置有外齿轮1108。
进一步地,喷料头1101与喷料枪1102之间相连接,且喷料枪1102通过定位销1103和调节液压油缸1104与工型板1105构成旋转结构;在调节液压油缸1104的作用下,能够有效的推动喷料枪1102沿定位销1103的外部转动,能够有效的改变喷料枪1102的转动角度,增强喷料枪1102的灵活适应性,以及可将喷料枪1102调节至合适的角度,能够有效的增强设备喷涂的精准性。
进一步地,工型板1105与固定内齿轮1107之间为固定连接,且工型板1105通过固定内齿轮1107和外齿轮1108与伺服电机1109构成啮合传动,并且伺服电机1109与连接机械臂1106之间为螺纹连接;在伺服电机1109的作用下,能够有效的通过固定内齿轮1107将旋转力施加于外齿轮1108,而外齿轮1108与工型板1105之间相连接,使得外齿轮1108和工型板1105之间同步转动,以及能够有效的改变工型板1105的转动角度,能够有效的改变设备喷涂的方向。
进一步地,横向位移调节机构12包括横向固定架1201、横向丝杆轴套柱块1202、横向调节丝杆1203和横向丝杆电机1204,横向固定架1201的内部设置有横向丝杆轴套柱块1202,且横向丝杆轴套柱块1202的内部贯穿有横向调节丝杆1203,并且横向调节丝杆1203另一侧的端部连接有横向丝杆电机1204,横向调节丝杆1203贯穿于横向丝杆轴套柱块1202的内部,横向固定架1201的中轴线垂直于支柱10;在横向丝杆电机1204的作用下,能够有效的通过横向调节丝杆1203推动横向丝杆轴套柱块1202沿横向固定架1201的中轴线方向移动,横向丝杆轴套柱块1202与连接机械臂1106之间相连接,使得横向丝杆轴套柱块1202和连接机械臂1106之间同步移动,能够有效的改变连接机械臂1106的移动距离和位置,可将连接机械臂1106调节至合适的位置,为设备的喷涂提供有效的辅助定位。
进一步地,具有三维扫描识别功能的智能一体化喷涂设备的喷涂方法包括以下步骤:
一、场地布置
将智能一体化喷涂设备安排到指定位置,以及将搅拌设备2与出料管3和连接管5,以及喷料枪1102相连接。
二、喷涂目标特征扫描采样
喷涂作业前,智能一体化喷涂设备利用其三维扫描仪13对喷涂目标的不同位面进行扫描采样,测量过程中三维扫描仪13的扫描探头可以任意翻转和移动,对物件进行多个视角的测量,系统进行全自动拼接,实现物体360°高精度测量,并且能够在获取表面三维数据的同时,迅速的获取状理信息。
三、图形建模、匹配和预处理
1特征提取
通过三维扫描仪13录入喷涂目标的采样信息后,从而给定特征集合,提取相同点,分辨不同点,建立的对象特征与特征之间的空间结构关系。
2建模
计算机系统接下来运用目前的已建立的目标模型去识别喷涂对象属于哪一位面,并给出边界,将物体与图像的其它部分分割开,对目标每一位面进行建模。
3定位
在成功地识别出物体之后,对喷涂目标的喷涂面进行定位,通过计算机系统对已建模的图像进行预分割及生成模型处理,以及对特征包得到的特征进行重构的方法,然后得出的特征的空间分布,从对喷涂目标的凹面与凸面进行精准定位。
四、喷涂作业
通过智能一体化喷涂设备对已配对的喷涂目标进行一体化喷涂作业,由智能一体化喷涂设备控制调用从搅拌设备2中把预先搅拌配比好的浆料,依据已扫描录入的墙体位面三维建模以及空间位面的不同,系统严格控制通过纵向位移调节机构9、角度调节喷涂机构11、横向位移调节机构12和移动喷料头1101的出浆量以及气阀推动的出浆速度对目标不同位面和区域进行差异化喷涂,并有效减少传统喷涂过程中所产生的落地灰,已达到保护施工环境、文明施工的目的。
五、墙体平整作业
喷浆完毕静止一段时间后,智能一体化喷涂设备对以完成喷浆的墙体进行二次扫描采样建模及匹配,以及调节机械臂14调节磨盘15打磨墙体,直至平滑。
六、场地清理
作业完成后,清理场地转移设备。
综上,该具有三维扫描识别功能的智能一体化喷涂设备,使用时,首先,用户可将涂料原料通过进料口204导入至搅拌罐体201的内部,接着,启动连接电机203,使得连接电机203通过连接主轴202带动搅拌臂208对涂料原料混合处理;
其次,启动纵向丝杆电机904,使得纵向丝杆电机904通过纵向调节丝杆903推动纵向丝杆轴套柱块902沿纵向固定架901的中轴线方向移动,而纵向丝杆轴套柱块902与支柱10之间相连接,使得纵向丝杆轴套柱块902和支柱10之间同步移动,直至将支柱10调节至合适的位置,接着,启动横向丝杆电机1204,使得横向丝杆电机1204通过横向调节丝杆1203推动横向丝杆轴套柱块1202沿横向固定架1201的中轴线方向移动,横向丝杆轴套柱块1202与连接机械臂1106之间相连接,使得横向丝杆轴套柱块1202和连接机械臂1106之间同步移动,直至将连接机械臂1106调节至合适的位置;
然后,启动伺服电机1109,使得伺服电机1109通过固定内齿轮1107将旋转力施加于外齿轮1108,而外齿轮1108与工型板1105之间相连接,使得外齿轮1108和工型板1105之间同步转动,以及启动调节液压油缸1104,使得调节液压油缸1104推动喷料枪1102沿定位销1103的外部转动,直至将喷料枪1102调节至合适的角度,随之,启动泵机4,泵机4将搅拌罐体201内部的涂料沿出料管3和连接管5导入至喷料枪1102的内部,通过喷料头1101将涂料喷射出;
最后,启动水泵7,水泵7将储水罐8的内部储水沿导水管6导入至连接导管205的内部,通过喷嘴206将水流喷射出,水流能够有效的为搅拌罐体201的内部清洗处理。
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种具有三维扫描识别功能的智能一体化喷涂设备
- 一种双芯片的智能锁指纹识别功能单元的一体化装置