基于遗传粒子群算法的多节点协同着陆位置规划方法
文献发布时间:2023-06-19 09:32:16
技术领域
本发明涉及一种探测器多节点协同着陆位置规划方法,尤其涉及一种基于遗传粒子群算法的探测器多节点协同着陆位置规划方法,属于航天深空探测技术领域和人工智能技术领域。
背景技术
航空航天领域是二十一世纪自主智能技术发展的主要领域之一。对于深空探测任务,一般具有目标距离地球遥远、通信延迟大、所处环境不确知等特点,导致探测器操作和控制存在巨大挑战。
运用人工智能技术来提高探测器的星上自主能力,是解决深空探测器上述问题的一个主流方向。探测器着陆,是深空探测任务中的一个关键阶段,关系到任务的成败,是深空探测领域的一个重点研究问题。探测器在着陆过程中,需要对着陆区域进行选择,以实现安全着陆。着陆区的局部地形情况,包括坡度、坑和石块等障碍区,对探测器安全着陆并保持姿态稳定有着重要影响。
现有的研究方法,主要是针对单个节点的探测器着陆问题。在探测器实际执行着陆任务时,由于着陆地域引力小等原因,探测器容易出现反弹、翻滚和倾覆的情况,例如日本“隼鸟”探测器、欧空局“罗塞塔”探测器等。
利用多个节点协同着陆,节点之间存在柔性物理连接,可以提高着陆的稳定性。但是,对于探测器的多节点着陆,需效解决如何有效选择多节点着陆位置,以保证在满足节点间的约束条件并避开障碍区的情况下实现高效着陆。
发明内容
本发明的目的是为了解决在多节点深空探测器在着陆过程中面临的着陆点位置选择的技术问题,创造性地提出一种基于遗传粒子群算法的探测器多节点协同着陆位置规划方法,能够高效获得各节点的最优着陆位置。
粒子群算法(PSO),依据个体粒子的适应值大小进行操作,将每个个体抽象成在搜索空间中的一个没有重量和体积的粒子,并在搜索空间中以一定的速度飞行,该飞行速度由个体的飞行经验和群体的飞行经验进行动态调整。但是,基本的粒子群算法常用于解决连续优化问题,且较容易陷入局部最优。本发明方法,通过对粒子群算法进行离散化建模,离散化粒子编码,并引入自适应遗传机制进行改进,模仿染色体的交叉和变异行为,自适应控制变异概率,在粒子群更容易陷入局部最优的情况下增大变异概率,保持较强的收敛速度的同时还有更好的跳出局部最优的能力,能够高效得出深空探测器多节点着陆位置的规划解。
本发明采用的技术方案如下:
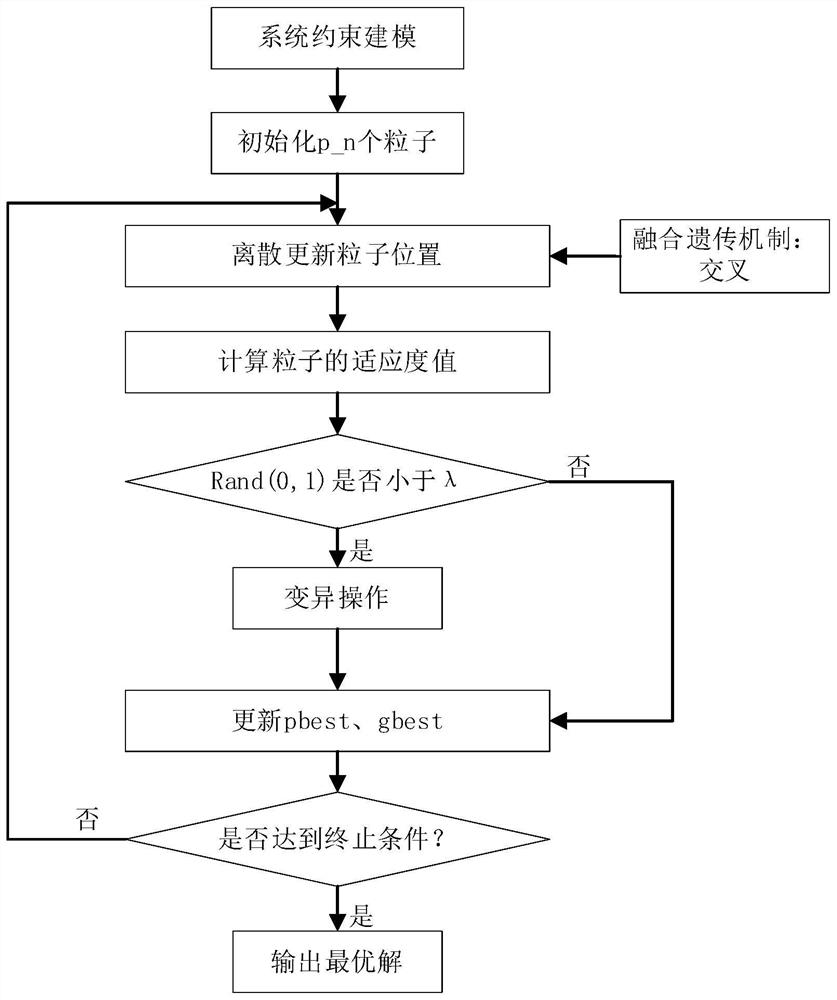
一种基于遗传粒子群算法的探测器多节点协同着陆位置规划方法,如图1所示,包括以下步骤:
步骤1:探测器多节点约束建模。
探测器的着陆节点具有一定的大小,多个着陆节点之间可能存在柔性物理连接,如图2所示。因此,探测器的着陆节点存在防干涉约束和连接约束。为了处理这两个约束,将着陆节点抽象成一个点,以该点为圆心,r为半径的区域是能容纳着陆节点实际尺寸的最小区域。
具体地,步骤1包括以下步骤:
步骤1.1:对着陆区地图的障碍物边缘进行扩充处理,扩充宽度为r,以此来处理节点受障碍物干涉的影响。如图3所示,为32×32的着陆区栅格图,黑色栅格为障碍物,白色方格为平坦地面。
经过处理后,灰色方格与障碍区黑色方格一样均为不可着陆点。
步骤1.2:探测器节点防干涉约束还表现在节点间防碰撞问题上,因此,将两个探测器节点之间的距离设置最小阈值d
步骤1.3:多个节点间的连接约束,即存在物理连接的节点之间距离应小于一个最大阈值d
其中,c
步骤1.4:对探测器多节点约束进行形式化建模。
所有节点之间的距离不能小于设定的最小距离阈值d
步骤2:对粒子进行编码并初始化。
结合探测器多节点着陆系统参数情况,对粒子群算法进行离散建模,根据着陆节点的数量对粒子进行了离散编码。
设深空探测器有n个着陆节点,着陆节点标号设为{1,2,…,n},则一个粒子表示为2n维行向量,即第i个粒子的当前位置为P
步骤3:计算粒子适应度值。
定义粒子的适应度函数为:若着陆点分布满足探测器各节点的连接约束,则适应度为存在柔性连接的节点间距离方差的倒数;若不满足,则适应度为0。适应度越高表示粒子更优,即存在柔性连接的节点之间的距离差值更小,探测器整体受力更均衡,以此得到的着陆位置更稳定。
第i个粒子的适应度f
步骤4:对粒子位置进行更新。
将每个粒子看作一条染色体,融合遗传机制中的交叉变异操作对粒子位置进行更新,对变异操作设置一个自适应遗传因子,自动控制变异发生概率,高效提升粒子全局搜索能力。
具体地,步骤4包括以下步骤:
步骤4.1:对于交叉操作,如图4所示,选择两个粒子,选择序列中的一个片段,互换两个粒子在这一片段的值。
粒子i的交叉操作有三种情况:第一,粒子i与其他普通粒子进行交叉;第二,粒子i与局部最优粒子P
步骤4.2:对于变异操作,如图5所示,粒子i的某些片段突变,即一个或者几个片段的值随机重置。引入变异操作,可以有效跳出局部最优的限制,有更大概率获得全局更优的粒子。
步骤4.3:自适应遗传因子控制变异操作,提升粒子群全局搜索能力。
粒子群的迭代刚开始时,几乎不会陷入局部最优,随着迭代次数的增加,粒子群陷入局部最优的可能变大。因此,能够帮助粒子群跳出局部最优的变异操作在迭代前期作用不大,在迭代后期作用增大。
为此,本方法创造性地提出一种自适应遗传机制,设计一个自适应因子作用于变异操作,粒子的变异操作除了受固定的发生概率影响,也受自适应因子的影响,能够根据迭代情况调整变异操作发生概率,以达到优化遗传操作的目的。
设自适应因子为λ,种群最大迭代次数为T
随着迭代次数的增加,λ逐渐趋近于1。通过加入自适应因子,粒子在迭代次数增加的同时更容易发生较为剧烈的变异,有更高的概率跳出局部最优。
步骤5:迭代更新局部最优粒子P
粒子群中的p_n个粒子经过交叉变异后,生成新的p_n个粒子组成新的粒子群,表示在算法优化后搜索到的p_n个着陆位置的方案。比较新粒子群中各粒子的适应度与其历史最优适应度的大小,更新当前粒子群中各粒子的局部最优P
步骤6:重复步骤3至步骤5,最终得到探测器多节点着陆位置规划的最优位置。
有益效果
本发明方法,对比现有技术,具有以下优点:
针对多着陆节点探测器系统的着陆位置规划问题,采用栅格图处理着陆区地图数据和障碍物信息,通过对粒子群算法进行离散化,融合遗传机制中的交叉变异操作,加入自适应遗传因子控制变异操作的发生概率,增强了算法的全局搜索能力。本方法能够有效处理多着陆节点探测器系统的防干涉约束和连接约束,生成满足距离约束的探测器着陆点,防止探测器节点间发生碰撞以及与地面障碍物发生碰撞,并保持存在柔性物理连接的节点之间均衡分布,增大探测器着陆的稳定性和安全性。
附图说明
图1为本发明方法的流程图。
图2为节点间不同连接方式。
图3为探测器着陆区栅格图的障碍物信息预处理。
图4为粒子交叉操作的示例。
图5为粒子变异操作的示例。
图6为实施例的栅格地图数据。
图7为实施例的探测器节点连接方式。
图8为实施例的扩充边缘后的栅格图数据。
图9为实施例的着陆位置规划结果。
具体实施方式
下面结合附图和实施例,对本发明方法做进一步详细说明。
实施例
一种基于遗传粒子群算法的探测器多节点协同着陆位置规划方法,如图1所示,具体实施过程如下:
步骤1:将探测器获得的着陆区栅格图数据作为输入。每个栅格点的坐标(x,y)表示着陆点,探测器着陆区的栅格地图抽象为只区分障碍区和非障碍区,本实施例使用的栅格图数据如图6所示,栅格图为32×32的矩阵,0表示非障碍区,1表示障碍区。
步骤2:设置探测器的节点连接方式,即:
初始化探测器约束参数,设置节点数量n=3,节点半径r=2,节点间的最小距离d
初始化算法参数,设置粒子种群规模p_n=50,最大迭代次数T
步骤3:对栅格图数据的障碍物信息进行预处理,根据节点半径r=2,将障碍物边缘向外扩充2个单位,如图8所示,扩充的边缘用2表示。
从输入数据可知,不考虑约束的情况下,给定的栅格数据提供了1024个可供着陆的候选点。根据实施例,探测器从中选择3个作为着陆点,即对粒子i编码为P
步骤4:随机初始化种群中所有的粒子,作为第1代粒子群P_S
步骤4.1:计算粒子群P_S
步骤4.2每个粒子i均有一个历史最优位置
步骤5:采用遗传粒子群算法迭代更新粒子群。
步骤5.1:在第t代粒子通过交叉变异操作迭代到第t+1代粒子的过程中,P_S
步骤5.2:变异操作受自适应因子的影响,其发生概率为如下公式:
如第2代粒子群的粒子变异概率受自适应遗传因子的影响变为λ=2/500=0.004,第400代粒子群的粒子变异概率变为λ=400/500=0.8。第t代粒子群P_S
步骤5.3:重新计算每个粒子的适应度值,更新每个粒子的历史局部最优位置
步骤5.4:粒子群继续进行更新迭代,直到迭代次数到达最高迭代次数T
步骤6:本实施例经过算法迭代运算,获得全局最优粒子G
如图8所示,将栅格图数据和规划解进行可视化,可直观地看出落点避开了障碍区,避免了节点边缘与障碍区碰撞,且分布均衡,提升了多节点深空探测器着陆的安全性和稳定性。
- 基于遗传粒子群算法的多节点协同着陆位置规划方法
- 基于遗传粒子群算法的多节点协同着陆位置规划方法