用于无人机的辅助摄像稳定装置
文献发布时间:2023-06-19 09:40:06
技术领域
本发明涉及无人机摄影设备技术领域,尤其涉及一种用于无人机的辅助摄像稳定装置。
背景技术
无人机云台是无人机用于安装、固定摄像机等任务载荷的支撑设备,由于摄影设备的功能和用途的不同,各种不同的传感器或摄影设备会被搭载在无人机云台,因此无人机云台也根据需要被设计不同的结构,限制于无人机载荷能力,摄影设备的功能和用途,通常要求保证云台正常工作的前提下,减小云台结构的重量、体积和增加云台的载荷能力。
但目前所使用的摄像辅助稳定装置都是在笛卡尔坐标系中的三个相互垂直方向上的旋转作用为主,三轴的稳定器在无人机的应用中还有一些缺陷,无法进行一些直线的运动,有时候需要无人机转动一定的方向进行拍摄,增加了无人机任务量。
因此,有必要开发一种用于无人机的辅助摄像稳定装置,结构简单,在旋转运动的基础上增加了直线运动,提高了摄像范围,减少了无人机的空中动作。
发明内容
本发明旨在解决现有技术或相关技术中存在的技术问题之一。
为此本发明提出了一种用于无人机的辅助摄像稳定装置。
有鉴于此,本发明提出了一种用于无人机的辅助摄像稳定装置,所述辅助摄像稳定装置包括:
主机臂,呈弧状,所述主机臂上设有滑槽,所述滑槽内设有电动滑块,所述电动滑块与所述无人机上的安装块连接,主机臂的一端设有第一旋转动力单元;
支撑架,包括平行设置的第一臂和第二臂,以及连接所述第一臂和第二臂的连接臂,所述连接臂上设有第二旋转动力单元,所述主机臂的另一端与所述第二旋转动力单元连接,所述第一臂和所述第二臂为电动伸缩臂;
第三旋转动力单元,设置于所述第一臂远离所述第二旋转动力单元的一端,所述第三旋转动力单元与第一连接爪连接,所述第二臂与第二连接爪转动连接;
承载架,包括第一横架、第二横架和设置于所述第一横架和所述第二横架之间的第一竖杆和第二竖杆,所述第一连接爪通过轴承与所述第一竖杆连接,所述第二连接爪通过轴承与所述第二竖杆连接。
进一步地,所述辅助摄像稳定装置还包括:
第一电磁铁,设置于所述第一旋转动力单元上;
第二电磁铁,设置于所述第二旋转动力单元上;
其中,所述第一电磁铁和所述第二电磁铁设置于所述滑槽的两端。
进一步地,所述滑槽呈T型,所述电动滑块的形状与所述滑槽的形状相匹配。
进一步地,所述第一旋转动力单元、所述第二旋转动力单元和所述第三旋转动力单元的结构相同,均包括:
固定端,所述固定端内设有电机座,电机的定子设置在所述电机座内;
转动端,所述转动端内设有连接槽,所述电机的转子与连接槽固定连接,所述电机带动所述转动端旋转;
其中,第一旋转动力单元的转动端与所述主机臂的一端连接,所述第二旋转动力单元的固定端与所述主机臂的另一端连接,所述第二旋转动力单元的转动端与所述连接臂连接,所述第三旋转动力单元的固定端与第一臂连接,所述第三旋转动力单元的转动端与第一连接爪连接。
进一步地,所述固定端内设有限位板,所述限位板上设有避让口,所述转子穿过所述避让口,所述限位板上设有限位槽,所述限位槽呈圆形,所述限位槽内设有限位块,所述转动端上设有凸起柱,所述凸起柱与所述限位槽相匹配。
进一步地,所述限位块包括平行的顶壁和底壁,前壁和厚壁以及两侧壁,所述底壁与限位槽的槽底接触,所述前壁和所述厚壁与所述限位槽的侧壁相切,所述两侧壁的中心点与圆形所述限位槽中心连线的角度不超过1°。
进一步地,所述第一连接爪和所述第二连接爪的结构相同,均为:
外框,所述六面体外框的内部设有圆柱体状的通槽;
其中,第一连接爪的外框与所述第三旋转动力单元的所述转动端固定连接,第一连接爪的通槽通过轴承与所述第一竖杆连接,所述第二连接爪的外框与所述第二臂转动连接,所述第二连接爪的通槽通过轴承与第二竖杆连接。
进一步地,所述第一横架包括平行设置的第一横杆和第二横杆,所述第一横杆和第二横杆的两端通过连接件连接,所述第二横架包括平行设置的第三横杆和第四横杆,所述第三横杆和所述第四横杆通过连接件连接,所述第一竖杆和所述第二竖杆分别设置于所述第一横架的两端,所述第一竖杆和所述第二竖杆位于所述连接件的中心处。
进一步地,所述第一横架和所述第二横架上还设有气压缸。
进一步地,所述第一横杆、所述第二横杆、所述第三横杆、所述第四横杆、所述第一竖杆和所述第二竖杆均为电动伸缩杆。
本发明提供的技术方案可以包括以下有益效果:
通过在主机臂上设置滑槽,在滑槽内设置电滑块,使承载架能够转变方向,同时第一臂和第二臂为电动伸缩杆,均能够在旋转运动的基础上增加了直线运动,结构简单,提高了摄像范围,减少了无人机的空中动作。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1示出了根据本发明一个实施例的用于无人机的辅助摄像稳定装置的主视图;
图2示出了根据本发明一个实施例的用于无人机的辅助摄像稳定装置的右视图;
图3示出了根据本发明一个实施例的用于无人机的辅助摄像稳定装置的俯视图;
图4示出了根据本发明一个实施例的主机臂的剖视图;
图5示出了根据本发明一个实施例的支撑架的示意图;
图6示出了根据本发明一个实施例的旋转动力电机的内部示意图;
图7示出了图6的A-A的示意图;
图8示出了根据本发明一个实施例的限位板的示意图;
图9示出了根据本发明一个实施例的承载架的示意图。
其中,图1至图9中的附图标记与部件名称之间的对应关系为:
1主机臂,101滑槽,102电动滑块,2第一旋转动力单元,201固定端,202电机座,203电机,204转动端,205连接槽,206限位板,207避让口,208限位槽,209限位块,210凸起柱,3支撑架,301第一臂,3011第一连接爪,302第二臂,3021第二连接爪,303连接臂,4第二旋转动力单元,5第三旋转动力单元,6承载架,601第一横架,6011第一横杆,6012第二横杆,602第二横架,6021第三横杆,6022第四横杆,603第一竖杆,604第二竖杆,605连接件,606气压缸,7第一电磁铁,8第二电磁铁,。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置和方法的例子。
本发明提出了一种用于无人机的辅助摄像稳定装置,该辅助摄像稳定装置包括:
主机臂1,呈弧状,主机臂1上设有滑槽101,滑槽101内设有电动滑块102,电动滑块102与无人机上的安装块连接,主机臂1的一端设有第一旋转动力单元2;
支撑架3,包括平行设置的第一臂301和第二臂302,以及连接第一臂301和第二臂302的连接臂303,连接臂303上设有第二旋转动力单元4,主机臂1的另一端与第二旋转动力单元4连接,第一臂301和第二臂302为电动伸缩臂;
第三旋转动力单元5,设置于第一臂301远离第二旋转动力单元4的一端,第三旋转动力单元5与第一连接爪3011连接,第二臂302与第二连接爪3021转动连接;
承载架6,包括第一横架601、第二横架602和设置于第一横架601和第二横架602之间的第一竖杆603和第二竖杆604,第一连接爪3011通过轴承与第一竖杆603连接,第二连接爪3021通过轴承与第二竖杆604连接。
主机臂1呈弧状,其上设有滑槽101,滑槽101内设有电动滑块102,电动滑块102能够在滑槽101内滑动,弧状的设置对电动滑块102的滑动以一定的推动作用,便于电动滑块102从主机臂1的一端移动至另一端时,同时在弧状和重力的作用下,减少电动滑块102的阻力,提高电动滑块102移动的顺畅性,并能够节省电力资源,其中电动滑块102与无人机固定连接。
第三旋转动力单元5与第一连接爪3011连接,第一连接爪3011与承载架6的第一竖杆603连接,第二臂302与第二连接爪3021转动连接,第二爪与承载架6的第二竖杆604连接,通过第三旋转动力单元5作为主动电机203,带动整个承载架6转动。
通过第一旋转动力单元2、第二旋转动力单元4和第三旋转动力单元5的设置实现辅助摄像稳定装置在三轴上的旋转运动,也就是说,在电动滑块102位于第一旋转电机203一端时,第一旋转动力单元2能够实现辅助摄像稳定装置的X轴平面内的旋转,第二旋转动力单元4能够实现辅助摄像稳定装置的Z轴平面内的旋转,第三旋转动力单元5能够实现辅助摄像稳定装置的Y轴平面内的旋转,从而实现了辅助摄像稳定装置的三轴旋转运动,进一步地,通过主机臂1上的滑槽101设置,在不改变无人机飞行轨迹的前提下,能够改变辅助摄像稳定装置的位置,进而增加了摄像范围,减少了无人机的空中动作,更进一步地,通过第一臂301和第二臂302的电动伸缩臂的设置,实现支撑架3的直线运动,通过伸出不同的长度,实现支撑架3的弧线运动。
通过在主机臂1上设置滑槽101,在滑槽101内设置电滑块,使承载架6能够转变方向,同时第一臂301和第二臂302为电动伸缩杆,均能够在旋转运动的基础上增加了直线运动,结构简单,提高了摄像范围,减少了无人机的空中动作。
需要说明的是,摄像设备固定在承载架6内。
进一步地,辅助摄像稳定装置还包括:
第一电磁铁7,设置于第一旋转动力单元2上;
第二电磁铁8,设置于第二旋转动力单元4上;
其中,第一电磁铁7和第二电磁铁8设置于滑槽101的两端。
通过第一电磁铁7和第二电磁铁8的设置,一方面能够对电动滑块102起到限位作用,避免电动滑块102脱离滑槽101,另一方面还能够对电动滑块102起到固定的作用,避免在无人机飞行中在风力和动力的作用下,电动滑块102在滑槽101内晃动,影响摄像的稳定性。
进一步地,滑槽101呈T型,电动滑块102的形状与滑槽101的形状相匹配。
滑槽101和电动滑块102设置成T型,通过电动滑块102T型两侧的突出部分卡在滑槽101T型两侧的槽内,提高电动滑块102对辅助摄像稳定装置的拉力,提高辅助摄像稳定装置的稳定性。
进一步地,第一旋转动力单元2、第二旋转动力单元4和第三旋转动力单元5的结构相同,均包括:
固定端201,固定端201内设有电机座202,电机203的定子设置在电机座202内;
转动端204,转动端204内设有连接槽205,电机203的转子与连接槽205固定连接,电机203带动转动端204旋转;
其中,第一旋转动力单元2的转动端204与主机臂1的一端连接,第二旋转动力单元4的固定端201与主机臂1的另一端连接,第二旋转动力单元4的转动端204与连接臂303连接,第三旋转动力单元5的固定端201与第一臂301连接,第三旋转动力单元5的转动端204与第一连接爪3011连接。
通过第一旋转动力单元2的转动端204与主机臂1的一端连接,第二旋转动力单元4的固定端201与主机臂1的另一端连接,第二旋转动力单元电机4的转动端204与连接臂303连接,第三旋转动力单元5的固定端201与第一臂301连接,第三旋转动力单元5的转动端204与第一连接爪3011连接,实现第一旋转动力单元2的带动辅助摄像稳定装置的转动,第二旋转动力单元4带动支撑架3的转动,第三旋转动力单元5带动承载架6在支撑架3内的转动,进而实现辅助摄像稳定装置的三轴旋转运动。
进一步地,固定端201内设有限位板206,限位板206上设有避让口207,转子穿过避让口207,限位板206上设有限位槽208,限位槽208呈圆形,限位槽208内设有限位块209,转动端204上设有凸起柱210,凸起柱210与限位槽208相匹配。
避让口207的设置能够便于转子与连接槽205连接,实现电机203的转子带动转动端204旋转的目的,限位板206上设有限位槽208,限位槽208成圆形,限位槽208内有限位块209转动端204上的凸起柱210与限位槽208匹配,通过限位块209对凸起柱210进行限位,即对转动端204进行限位,避免多圈通向旋转造成连接线的缠绕,影响电机203的使用寿命。
进一步地,限位块209包括平行的顶壁和底壁,前壁和厚壁以及两侧壁,底壁与限位槽208的槽底接触,前壁和厚壁与限位槽208的侧壁相切,两侧壁的中心点与圆形限位槽208中心连线的角度不超过1°。
限位块209的两侧壁的中心点与圆形限位槽208中心连线的角度不超过1°,也就是说限位块209的厚度不宜过大,过多的影响转动角度,限位块209的厚度不宜过小,避免凸起柱210转动时把限位块209撞弯,影响限位块209对转动端204的限位。
需要说明的是,通过限位块209对旋转角度的影响可以通过第一臂301和第二臂302的伸缩调整进行弥补。
进一步地,第一连接爪3011和第二连接爪3021的结构相同,均为:
外框,六面体外框的内部设有圆柱体状的通槽;
其中,第一连接爪3011的外框与第三旋转动力单元5的转动端204固定连接,第一连接爪3011的通槽通过轴承与第一竖杆603连接,第二连接爪3021的外框与第二臂302转动连接,第二连接爪3021的通槽通过轴承与第二竖杆604连接。
圆柱体状的通槽是为了与第一竖杆603和第二竖杆604配合,在第一臂301和第二臂302伸缩时,能够实现承载架6的一个弧线运动,从而弥补限位块209对旋转角度的影响。
进一步地,第一横架601包括平行设置的第一横杆6011和第二横杆6012,第一横杆6011和第二横杆6012的两端通过连接件605连接,第二横架602包括平行设置的第三横杆6021和第四横杆6022,第三横杆6021和第四横杆6022通过连接件605连接,第一竖杆603和第二竖杆604分别设置于第一横架601的两端,第一竖杆603和第二竖杆604位于连接件605的中心处。
通过第一横杆6011、第二横杆6012的设置实现了对第一横架601的加宽处理,同理第三横杆6021、第四横杆6022的设置实现了对第二横架602的加宽处理,提高了对摄像设备搭载的稳定性。
需要说明的是,连接件605包括横杆,所述横杆的两端设置一对第一容纳槽,所述横杆上设有第二容纳槽,所述第二容纳槽位于所述横杆的中心处,所述第二容纳槽的轴线与所述第一容纳槽的轴线垂直,第一容纳槽和第二容纳槽用于放置第一横杆6011和第二横杆6012,以及第三横杆6021和第四横杆6022,第二容纳槽用于放置第一竖杆603和第二竖杆604。
进一步地,第一横架601和第二横架602上还设有气压缸606。
其中第一横架601的第一横杆6011和第二横杆6012的两端均设有一个气压缸606,同理,第二横架602的第三横杆6021和第四横杆6022的两端也均设有一个气压缸606,通过气压缸606与摄像设备固定连接,通过气压缸606的设置,能够起到减震的作用,在无人机飞行过程中能够减少震动和风阻对摄像设备的震荡,提高摄像设备的稳定性和摄制图像的清晰度。
进一步地,第一横杆6011、第二横杆6012、第三横杆6021、第四横杆6022、第一竖杆603和第二竖杆604均为电动伸缩杆。
第一横杆6011、第二横杆6012、第三横杆6021、第四横杆6022、第一竖杆603和第二竖杆604均为电动伸缩杆能够使支撑架3适用于不同尺寸的摄像设备。
需要说明的是,本实施例中所有的直角处均做圆角处理,降低风阻,提高辅助摄像稳定装置的稳定性。
图1示出了根据本发明一个实施例的用于无人机的辅助摄像稳定装置的主视图;图2示出了根据本发明一个实施例的用于无人机的辅助摄像稳定装置的右视图;图3示出了根据本发明一个实施例的用于无人机的辅助摄像稳定装置的俯视图;图4示出了根据本发明一个实施例的主机臂的剖视图;图5示出了根据本发明一个实施例的支撑架的示意图。
如图1至图5所示,本实施例提供了一种用于无人机的辅助摄像稳定装置,该辅助摄像稳定装置包括:
主机臂1,呈弧状,主机臂1上设有滑槽101,滑槽101内设有电动滑块102,电动滑块102与无人机上的安装块连接,主机臂1的一端设有第一旋转动力单元2;
支撑架3,包括平行设置的第一臂301和第二臂302,以及连接第一臂301和第二臂302的连接臂303,连接臂303上设有第二旋转动力单元4,主机臂1的另一端与第二旋转动力单元4连接,第一臂301和第二臂302为电动伸缩臂;
第三旋转动力单元5,设置于第一臂301远离第二旋转动力单元4的一端,第三旋转动力单元5与第一连接爪3011连接,第二臂302与第二连接爪3021转动连接;
承载架6,包括第一横架601、第二横架602和设置于第一横架601和第二横架602之间的第一竖杆603和第二竖杆604,第一连接爪3011通过轴承与第一竖杆603连接,第二连接爪3021通过轴承与第二竖杆604连接。
其中,摄像设备固定在承载架6内。
如图4所示,主机臂1呈弧状,其上设有滑槽101,滑槽101内设有电动滑块102,电动滑块102能够在滑槽101内滑动,弧状的设置对电动滑块102的滑动以一定的推动作用,便于电动滑块102从主机臂1的一端移动至另一端时,同时在弧状和重力的作用下,减少电动滑块102的阻力,提高电动滑块102移动的顺畅性,并能够节省电力资源,其中电动滑块102与无人机固定连接。
第三旋转动力单元5与第一连接爪3011连接,第一连接爪3011与承载架6的第一竖杆603连接,第二臂302与第二连接爪3021转动连接,第二爪与承载架6的第二竖杆604连接,通过第三旋转动力单元5作为主动电机203,带动整个承载架6转动。
通过第一旋转动力单元2、第二旋转动力单元4和第三旋转动力单元5的设置实现辅助摄像稳定装置在三轴上的旋转运动,也就是说,在电动滑块102位于第一旋转电机203一端时,第一旋转动力单元2能够实现辅助摄像稳定装置的X轴平面内的旋转,第二旋转动力单元4能够实现辅助摄像稳定装置的Z轴平面内的旋转,第三旋转动力单元5能够实现辅助摄像稳定装置的Y轴平面内的旋转,从而实现了辅助摄像稳定装置的三轴旋转运动,进一步地,通过主机臂1上的滑槽101设置,在不改变无人机飞行轨迹的前提下,能够改变辅助摄像稳定装置的位置,进而增加了摄像范围,减少了无人机的空中动作,更进一步地,通过第一臂301和第二臂302的电动伸缩臂的设置,实现支撑架3的直线运动,通过伸出不同的长度,实现支撑架3的弧线运动。
需要说明的是,第一臂301和连接臂303的连接处,第二臂302和连接臂303的连接处进行圆弧处理,降低风阻,提高需辅助摄像稳定装置的稳定性。
进一步地,辅助摄像稳定装置还包括:
第一电磁铁7,设置于第一旋转动力单元2上;
第二电磁铁8,设置于第二旋转动力单元4上;
其中,第一电磁铁7和第二电磁铁8设置于滑槽101的两端。
通过第一电磁铁7和第二电磁铁8的设置,一方面能够对电动滑块102起到限位作用,避免电动滑块102脱离滑槽101,另一方面还能够对电动滑块102起到固定的作用,避免在无人机飞行中在风力和动力的作用下,电动滑块102在滑槽101内晃动,影响摄像的稳定性。
进一步地,进一步地,滑槽101呈T型,电动滑块102的形状与滑槽101的形状相匹配。
滑槽101和电动滑块102设置成T型,通过电动滑块102T型两侧的突出部分卡在滑槽101T型两侧的槽内,提高电动滑块102对辅助摄像稳定装置的拉力,提高辅助摄像稳定装置的稳定性。
图6示出了根据本发明一个实施例的旋转动力电机的内部示意图;图7示出了图6的A-A的示意图;图8示出了根据本发明一个实施例的限位板的示意图。
如图6至图8所示,在实施例1的基础上,本实施例进一步限定了旋转动力单元的结构,第一旋转动力单元2、第二旋转动力单元4和第三旋转动力单元5的结构相同,均包括:
固定端201,固定端201内设有电机座202,电机203的定子设置在电机座202内;
转动端204,转动端204内设有连接槽205,电机203的转子与连接槽205固定连接,电机203带动转动端204旋转;
其中,第一旋转动力单元2的转动端204与主机臂1的一端连接,第二旋转动力单元4的固定端201与主机臂1的另一端连接,第二旋转动力单元4的转动端204与连接臂303连接,第三旋转动力单元5的固定端201与第一臂301连接,第三旋转动力单元5的转动端204与第一连接爪3011连接。
通过第一旋转动力单元2的转动端204与主机臂1的一端连接,第二旋转动力单元4的固定端201与主机臂1的另一端连接,第二旋转动力单元电机4的转动端204与连接臂303连接,第三旋转动力单元5的固定端201与第一臂301连接,第三旋转动力单元5的转动端204与第一连接爪3011连接,实现第一旋转动力单元2的带动辅助摄像稳定装置的转动,第二旋转动力单元4带动支撑架3的转动,第三旋转动力单元5带动承载架6在支撑架3内的转动,进而实现辅助摄像稳定装置的三轴旋转运动。
进一步地,固定端201内设有限位板206,限位板206上设有避让口207,转子穿过避让口207,限位板206上设有限位槽208,限位槽208呈圆形,限位槽208内设有限位块209,转动端204上设有凸起柱210,凸起柱210与限位槽208相匹配。
避让口207的设置能够便于转子与连接槽205连接,实现电机203的转子带动转动端204旋转的目的,限位板206上设有限位槽208,限位槽208成圆形,限位槽208内有限位块209转动端204上的凸起柱210与限位槽208匹配,通过限位块209对凸起柱210进行限位,即对转动端204进行限位,避免多圈通向旋转造成连接线的缠绕,影响电机203的使用寿命。
进一步地,限位块209包括平行的顶壁和底壁,前壁和厚壁以及两侧壁,底壁与限位槽208的槽底接触,前壁和厚壁与限位槽208的侧壁相切,两侧壁的中心点与圆形限位槽208中心连线的角度不超过1°。
限位块209的两侧壁的中心点与圆形限位槽208中心连线的角度不超过1°,也就是说限位块209的厚度不宜过大,过多的影响转动角度,限位块209的厚度不宜过小,避免凸起柱210转动时把限位块209撞弯,影响限位块209对转动端204的限位。
需要说明的是,通过限位块209对旋转角度的影响可以通过第一臂301和第二臂302的伸缩调整进行弥补。
进一步地,第一连接爪3011和第二连接爪3021的结构相同,均为:
外框,六面体外框的内部设有圆柱体状的通槽;
其中,第一连接爪3011的外框与第三旋转动力单元5的转动端204固定连接,第一连接爪3011的通槽通过轴承与第一竖杆603连接,第二连接爪3021的外框与第二臂302转动连接,第二连接爪3021的通槽通过轴承与第二竖杆604连接。
圆柱体状的通槽是为了与第一竖杆603和第二竖杆604配合,在第一臂301和第二臂302伸缩时,能够实现承载架6的一个弧线运动,从而弥补限位块209对旋转角度的影响。
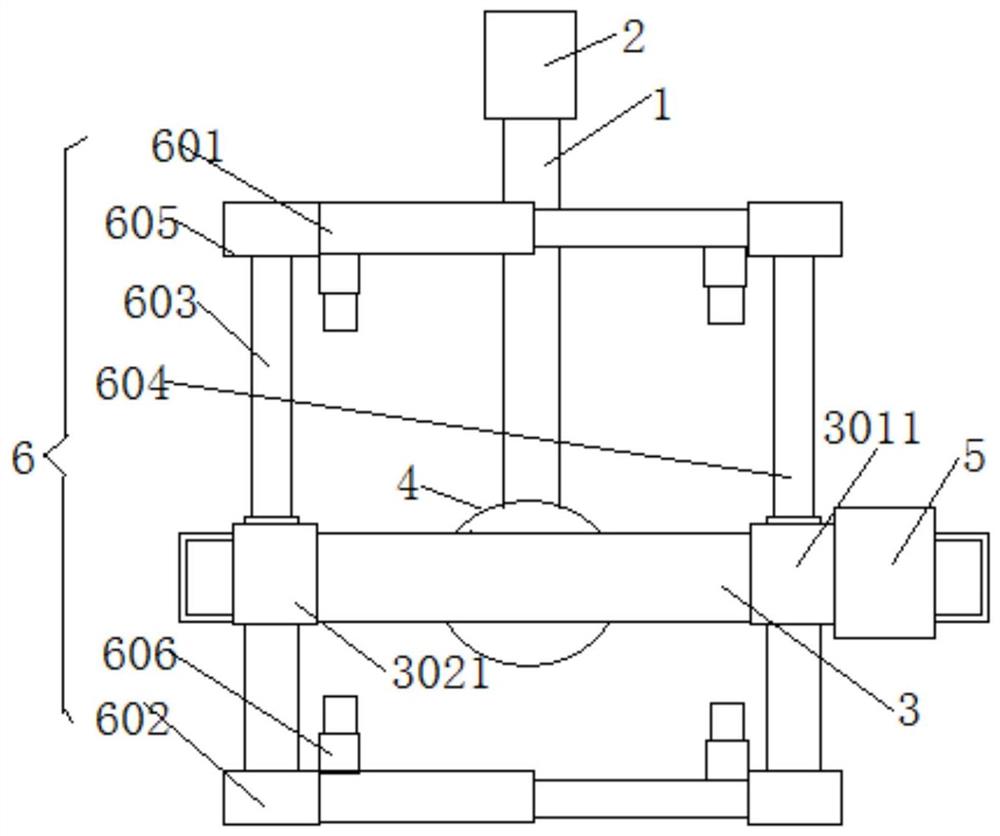
图9示出了根据本发明一个实施例的承载架的示意图。
如图9所示,在实施例1的基础上,本实施例进一步限定的承载架6的结构,第一横架601包括平行设置的第一横杆6011和第二横杆6012,第一横杆6011和第二横杆6012的两端通过连接件605连接,第二横架602包括平行设置的第三横杆6021和第四横杆6022,第三横杆6021和第四横杆6022通过连接件605连接,第一竖杆603和第二竖杆604分别设置于第一横架601的两端,第一竖杆603和第二竖杆604位于连接件605的中心处。
通过第一横杆6011、第二横杆6012的设置实现了对第一横架601的加宽处理,同理第三横杆6021、第四横杆6022的设置实现了对第二横架602的加宽处理,提高了对摄像设备搭载的稳定性。
需要说明的是,连接件605包括横杆,所述横杆的两端设置一对第一容纳槽,所述横杆上设有第二容纳槽,所述第二容纳槽位于所述横杆的中心处,所述第二容纳槽的轴线与所述第一容纳槽的轴线垂直,第一容纳槽和第二容纳槽用于放置第一横杆6011和第二横杆6012,以及第三横杆6021和第四横杆6022,第二容纳槽用于放置第一竖杆603和第二竖杆604。
进一步地,第一横架601和第二横架602上还设有气压缸606。
其中第一横架601的第一横杆6011和第二横杆6012的两端均设有一个气压缸606,同理,第二横架602的第三横杆6021和第四横杆6022的两端也均设有一个气压缸606,通过气压缸606与摄像设备固定连接,通过气压缸606的设置,能够起到减震的作用,在无人机飞行过程中能够减少震动和风阻对摄像设备的震荡,提高摄像设备的稳定性和摄制图像的清晰度。
进一步地,第一横杆6011、第二横杆6012、第三横杆6021、第四横杆6022、第一竖杆603和第二竖杆604均为电动伸缩杆。
需要说明的是,为了配合第一横杆6011、第二横杆6012、第三横杆6021、第四横杆6022、第一竖杆603和第二竖杆604均为电动伸缩杆调整承载架6的大小,因此,连接臂303也设置为可伸缩式,便于同时调节。
第一横杆6011、第二横杆6012、第三横杆6021、第四横杆6022、第一竖杆603和第二竖杆604均为电动伸缩杆能够使支撑架3适用于不同尺寸的摄像设备。
需要说明的是第一竖杆603和第二竖杆604的固定端201上外套有橡胶套,进一步提高承载架6与摄像设备接触时的减震性能。
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
- 用于无人机的辅助摄像稳定装置
- 用于无人机航拍中摄像机安装的缓冲阻力稳定连接机构