用于控制工业执行器的方法和控制系统
文献发布时间:2023-06-19 09:41:38
技术领域
本公开通常涉及工业执行器的控制。特别地,提供了用于控制工业执行器以执行包含至少一个混合区的移动路径的方法和控制系统。
背景技术
机器人程序通常包括多个编程位置或点,用于确定工具中心点(TCP)或工业机器人手臂远端的移动路径。机器人程序例如通过假设点之间的线性移动段,可以确定连续点之间的完全限定的移动路径。可以说,移动段构成了用于移动路径的构建块。
先前已知限定了与移动路径的一个或多个点相关联的混合区。通过在飞越点周围限定混合区,当执行移动路径时永远无法到达该点,因为在到达点之前运动的方向已经改变。现在,混合区是圆形的并且与飞越点相关联的混合区的半径不能大于到最近点距离的一半(向前或向后)。如果指定了更大的混合区,混合区的大小将自动减小到最近点距离的一半。
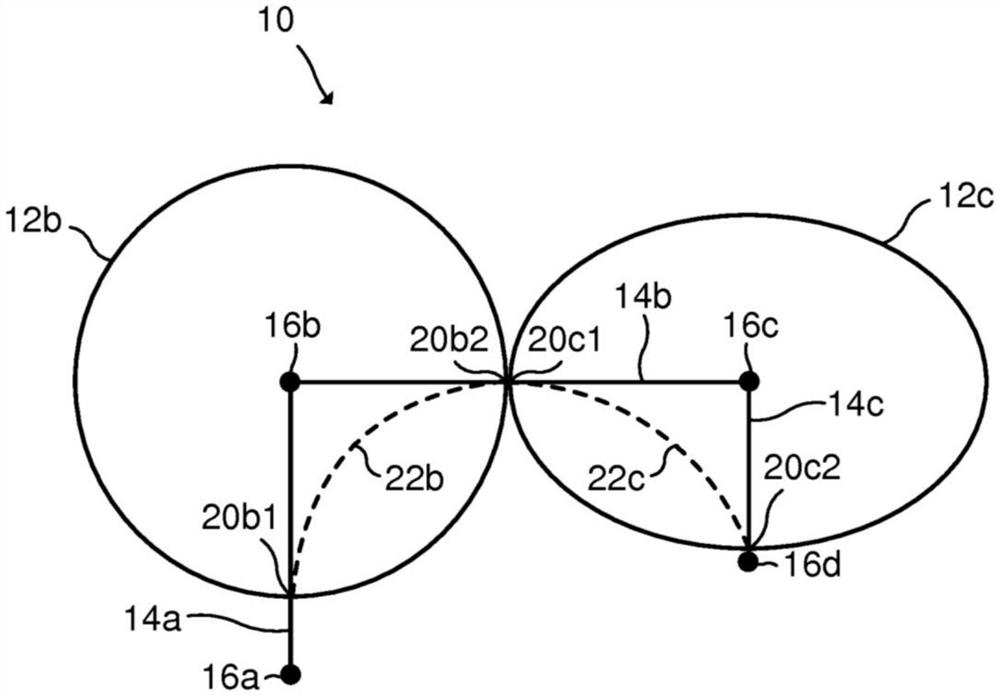
图1示意性地示出了根据现有技术的由工业执行器(未示出)和两个混合区12b、12c跟随的移动路径10的示例。移动路径10被限定为多个移动段14a、14b、14c的序列。在图1的示例中,第一移动段14a被限定在第一点16a与第二点16b之间,第二移动段14b被限定在第二点16b与第三点16c之间,并且第三移动段14c被限定在第三点16c与第四点16d之间。图1进一步示出了分别与第二点16b和第三点16c相关联的圆形第二编程混合区18b和圆形第三编程混合区18c。在图1的示例中,第二点16b和第三点16c是飞越点,这意味着当通过工业执行器执行移动路径10时,可能永远无法到达编程点。相反,运动的方向在点16b、16c中的每个点到达之前改变。
此外,在图1的示例中,第一点16a和第四点16d是停止点,这意味着工业执行器在这些点处完全停止。停止点是一种类型的精细点。精细点意味着工业执行器(和可选的外部设备)必须在程序执行继续到下个指令之前到达指定的位置。精细点备选地可以被称为零区。图1进一步示出了限定的第二混合区12b和限定的第三混合区12c。在本公开中,移动段14a、14b、14c、编程混合区18b、18c、点16a、16b、16c、16d以及限定的混合区12b、12c还可以分别用参考标号“14”、“18”、“16”和“12”表示。
在图1的示例中,两个编程的混合区18b、18c重叠。第二编程混合区18b延伸超过第一移动段14a的长度的50%,并且第三编程混合区18c延伸超过第二移动段14b和第三移动段14c中每个移动段的长度的50%。
为了避免这种重叠,已知将编程混合区18b、18c中的每个编程混合区的半径减小到与编程混合区18b、18c相关联的移动段14a、14b、14c的最短者的50%。如图1中所示,与第二点16b相关联的第一移动段14a比与第二点16b相关联的第二移动段14b短,并且与第三点16c相关联的第三移动段14c比与第三点16c相关联的第二移动段14b短。因此,根据现有技术减小第二编程混合区18b的半径,使得第二混合区12b被限定为具有与第一移动段14a的长度的50%对应的半径,并且第三编程混合区18c被减小,使得第三混合区12c被限定为具有与第三移动段14c的长度的50%对应的半径。
混合区12b、12c的限定的灵活性受到限制,因为混合区12b、12c被对称地限定为圆形。如图1中所示,所限定的混合区12b、12c相对较小。因此,在没有发生混合的两个相邻混合区12之间可能存在相对较长的距离。例如在图1中,沿着第二移动段14b在第二混合区12b与第三混合区12c之间存在相对较长的距离。因此,当由工业执行器执行移动路径10时,可获得的最大平滑度和速度是受限的。当两个连续移动段14之间的长度更高时,例如对于与非常长的移动段14与非常短的移动段14之间的点16相关联的混合区12,这些问题被进一步加剧。即,如果移动段14短得多,混合区12可以限定为远小于较长移动段14的50%。
US 2009037021 A1涉及用于促进在运动轨迹内执行一系列移动的运动控制和规划算法。在示例中,轨迹被指定为一个或多个路径段的序列。针对一个或多个路径段中的每个路径段计算速度分布,其中每个速度分布被划分为混合内区域、混合外区域和剩余区域。每个路径段被执行使得路径段的速度分布的混合内区域仅与先前分布的混合外区域重叠。
发明内容
本公开的目标是提供用于控制工业执行器的方法,该方法提供工业执行器更平滑的运动。
本公开的另一目标是提供用于控制工业执行器的方法,该方法提供工业执行器更快的运动。
本公开的另一目标是提供用于控制工业执行器的方法,该方法减少工业执行器的磨损。
本公开的又一目标是提供用于控制工业执行器的方法,该方法减少涉及工业执行器的操作的循环时间。
本公开的又一目标是提供用于控制工业执行器的方法,该方法解决上述一些或全部目标。
本公开的又一目标是提供用于控制工业执行器的控制系统,该控制系统解决上述一个、一些或全部目标。
本公开的又一目标是提供包括控制系统和工业执行器的执行器系统,该执行器系统解决上述一个、一些或全部目标。
根据一方面,提供了一种用于控制工业执行器的方法,该方法包括将移动路径限定为多个连续移动段的序列,其中每个移动段被限定在两个点之间;限定与两个连续移动段之间的点中的一个点相关联的至少一个混合区,其中混合区关于两个连续移动段中的每个移动段被独立地限定;以及通过工业执行器执行包括混合区的移动路径。
这些点可以由工业执行器的程序(例如机器人程序)中的编程位置构成。混合区用于指定如何终止两个连续移动段中的第一个移动段,以及如何启动两个连续移动段中的第二个移动段,即工业执行机构在向下个点移动之前必须与两个连续移动段之间的点有多近。
通过独立地限定混合区,即通过确定在与混合区相关联的两个连续移动段中的每个移动段中独立表示的混合区,提供了混合区的灵活限定。不受对称性的限制,允许根据本公开的混合区的形状变化和不对称。这种灵活的限定使更大的混合区可以应用于移动路径的点。当执行移动路径时,针对每个可以被放大的混合区,可以提高工业执行器移动的平滑度,可以提高工业执行器移动的速度,和/或可以减少涉及工业执行器的操作的循环时间。利用该方法,还可以通过利用较短的移动路径、减慢工业执行器的速度来减少工业执行器(和/或包括工业执行器的执行器系统的外部设备)的磨损并且提高工业执行器的使用寿命,并且保持与应用该方法之前相同的循环时间。
在本公开中,每个移动段可以由移动路径的两个连续点之间的线性插值构成。然而,备选地,插值可以是一般的,即不必是线性的。插值可以使用不同类型的笛卡尔基函数,诸如直线、圆形段和样条。工业执行器的关节坐标中的插值和/或用于工具定向的插值也是可能的。
混合区可以借助两个区边界来限定,并且每个区边界可以关于两个连续移动段中的相应的一个移动段来限定。备选地或附加的,混合区可以关于所述两个连续移动段(14)中的每个移动段以从0至1的因数或者0%至100%之间的百分比被限定。该因数可以由插值指数构成,该指数在与混合区相关联的点上具有值0并且在每个相邻点具有值1。
混合区可以关于所述两个连续移动段(14)中的每个移动段以不同的因数来限定。在移动路径的一个或多个点是精细点的情况下,与飞越点相关联的至少一个混合区可以被限定为飞越点与精细点之间的移动段的100%。相同的混合区仍然可以关于与混合区相关联的其他移动段独立地限定。因此,可以移除先前移动段向精细点的50%的混合区的限制。
至少一个混合区可以包括与第一点相关联的第一混合区。在这种情况下,该方法可以进一步包括限定与第二点相关联、与第一点连续的至少一个第二混合区;以及确定第一混合区与第二混合区之间是否存在重叠。
该方法可以进一步包括如果确定第一混合区与第二混合区之间存在重叠,则将关于第一点与第二点之间的移动段的第一混合区和第二混合区的限定修改为关于第一点与第二点之间移动段的平均值。
作为备选方案,该方法可以进一步包括如果确定第一混合区与第二混合区之间存在重叠,则通过修改关于第一点与第二点之间的移动段的限定,来减小第一混合区和第二混合区中的最大者,直到重叠被消除。
作为另一备选方案,该方法可以进一步包括如果确定第一混合区与第二混合区之间存在重叠,则通过修改关于第一点与第二点之间的移动段的限定,来减小第一混合区和第二混合区中具有最低优先级的混合区,直到所述重叠被消除。即,高优先级混合区将限制任何相邻的低优先级的混合区。
然而,如果高优先级混合区小于50%(关于与高优先级混合区和低优先级混合区相关联的点之间的移动段),则相邻的低优先级混合区可以仍然大于50%(关于与高优先级混合区和低优先级混合区相关联的点之间的移动段)。高优先级可以应用于移动路径的任何混合区,例如与起点或终点相关联,或与任何中间点相关联。
根据示例,移动路径包括与中间点相关联的高优先级混合区,该高优先级混合区位于两个与相应的相邻点相关联的低优先级混合区之间。在这种情况下,两个相邻点中的每个点可以由具有相对较大的混合区(例如,至少90%)的飞越点构成,并且中间点可以由具有相对较小的混合区(例如最大10%)的飞越点构成。移动路径的使用包括在具有相对较大的低优先级混合区两个相邻混合区之间的中间精细点或者具有相对较小的高优先级混合区的中间飞越点,在中间点是操作点(例如,拾取或放置点)的情况下,对传送带是有利的。
与这些点中的一个点相关联的至少一个混合区的限定可以包括限定至少两个混合区,并且每个混合区可以关于两个连续移动段中的每个移动段被独立地限定。
该方法可以进一步包括在至少一个混合区中的一个混合区内同时执行两个连续移动段。在本公开中,这种混合区可以被称为笛卡尔定位混合区。
该方法可以进一步包括当工业执行器到达与该点相关联的至少一个混合区中的一个混合区时,启动工业执行器的工具的重新定向朝向与这些点中的一个点相关联的工具的定向。在本公开中,这种混合区可以被称为定向混合区。如果混合区太小,则必须降低工业执行器的速度以执行工具重新定向的风险较小。如果混合区的大小增加,则重新定向将更加平滑。
该方法可以进一步包括当工业执行器到达与该点相关联的至少一个混合区中的一个混合区时,启动与移动路径的点中的一个点相关联的外部设备的操作。在本公开中,用于触发外部设备的操作的这种启动的混合区可以被称为外部设备混合区或外部轴线混合区。例如,当工业执行器到达外部设备混合区时,可启动外部设备向与该点相关联的位置的移动。以这种方式,缓慢的外部设备可以在更早的阶段开始加速,并且涉及工业执行器和外部设备的过程可以更平滑地执行。
外部设备例如可以由附加的工业机器人(如果工业执行器由工业机器人构成)、可旋转工作台或任何类型的操作设备构成。这种操作设备的示例可以是喷漆装置,该喷漆设备与工业执行器到达与该点相关联的外部设备混合区时启动喷漆的点相关联。
根据本公开的方法可以包括关于两个连续移动段中的每个移动段独立地限定仅一个笛卡尔定位混合区、仅一个定向混合区或仅一个外部设备混合区。备选地,至少一个混合区的限定可以包括关于两个连续移动段中的每个移动段独立地限定笛卡尔定位混合区、定向混合区和外部设备混合区的任意组合。
贯穿本公开,工业执行器可以是工业机器人。
根据另一方面,提供了一种用于控制工业执行器的控制系统,该控制系统包括数据处理设备和具有存储在其上的计算机程序的存储器,该计算机程序包括程序代码,当由数据处理设备执行时,使数据处理设备执行以下步骤:将移动路径限定为多个连续移动段的序列,其中每个移动段被限定在两个点之间;限定与两个连续移动段之间的点中的一个点相关联的至少一个混合区,其中混合区关于两个连续移动段中的每个移动段被独立地限定;以及命令工业执行器执行包括混合区的移动路径。控制系统可以进一步被配置为根据本公开中的每种方法控制工业执行器并且选择性地控制外部设备。
根据另一方面,提供了一种执行器系统,包括工业执行器(诸如工业机器人)和根据本公开的控制系统。执行器系统可以进一步包括外部设备,诸如另一个工业机器人或定位工作台。
附图说明
本公开进一步的细节、优点和方面将从结合附图的以下实施例中变得明显,其中:
图1:示意性地示出了根据现有技术的移动路径和混合区;
图2:示意性地示出了根据本发明的一个实施例的移动路径和混合区;
图3:示意性地示出了图2中移动路径的混合区内的移动段的混合;
图4:示意性地示出了根据本公开的一个实施例的包括工业执行器、外部设备和控制系统的执行器系统的侧视图;
图5:示意性地示出了根据本公开的一个实施例与一个点相关联的移动路径和三个混合区;
图6a至图6f:示意性地示出了图5中的移动路径的执行的各个阶段。
具体实施方式
在下文中,将描述用于控制工业执行器以执行包括至少一个混合区的移动路径的方法和控制系统。相同的参考标号将用于指示相同或相似的结构特征。
图2示意性地示出了根据本发明的一个实施例的移动路径10和混合区12b、12c。图2中的移动路径10包括与图1中的移动路径10相同的点16、在点16之间的相同的连续移动段14以及相同的编程混合区18b、18c。然而,在图2中混合区12被不同地限定。
图2中的移动路径10是二维的,但是备选地可以是三维的。在图2中,在与两个连续移动段14之间的点16相关联的每个混合区12中同时执行两个连续移动段14。移动路径10例如可以跟随工业执行器的TCP。因此,图2中的混合区12b、12c可以被称为TCP混合区或笛卡尔定位混合区。
第一点16a和第四点16d是精细点(停止点)。因此,没有限定与这些点相关联的混合区。
第二混合区12b关于两个连续移动段14a、14b中的每个移动段被独立地限定,并且第三混合区12c关于两个连续移动段14b、14c中的每个移动段被独立地限定。因此,混合区12b、12c不受对称性的限制。
混合区12可以以各种方式限定。根据一个示例,借助区边界来限定混合区12。在图2中,第二混合区12b关于第一移动段14a和第二移动段14b的限定可以分别地借助两个第二区边界20b1、20b2来进行,并且第三混合区12c关于第二移动段14b和第三移动段14c的限定可以分别借助两个第三区边界20c1、20c2构成(区边界20b1、20b2、20c1、20c2还可以用参考标号“20”表示)。
混合区12的最大允许尺寸可能由于一些原因而超出,包括例如程序员缺乏技术或关心、对移动路径10进行的更改(例如减小移动段14的长度)以及基于传感器输入(例如视觉系统)的移动路径10的自动生成,其中移动段14的长度先前未知。根据本发明的方法可以包括对每个混合区12的最大尺寸的限制。这种限制的示例是,应该关于与混合区12相关联的两个连续移动段14中的每个移动段、以0至1之间的因数(即在0%和100%之间)限定每个混合区12。在图2中的示例中,关于第一移动段14a的第二编程混合区18b的限定约为75%,并且关于第二移动段14b的第二编程混合区18b的限定约为50%。因此,第二编程混合区18b不需要由于超过最大尺寸而减小。因此,第二混合区12b可以被限定为第二编程混合区18b。
此外,第三编程混合区18c关于第二移动段14b的限定约为75%,这在该限制的范围内。然而,第三编程混合区18c关于第三移动段14c的限定约为200%。因此,第三混合区12c关于第三移动段14c的限定被降低到100%。从而允许第三混合区12c一直延伸到精细点16d。
在图2中,在第二编程混合区18b与第三编程混合区18c之间存在重叠。存在这种重叠的各种原因,包括例如程序员缺乏技能或关心和对移动路径10进行的更改(例如减小移动段14的长度)。根据本发明的方法可包括确定两个连续混合区12之间是否存在重叠。除了将每个所限定的混合区12b、12c设置为具有与根据现有技术与混合区12相关联的两个连续移动段14中最短的长度的50%对应的半径的圆,本发明提供了处理这种重叠的备选的方法。
处理重叠的措施包括如果确定第二混合区12b与第三混合区12c之间存在重叠,则将第二混合区12b和第三混合区12c的限定修改为关于第二移动段14b的平均值。在图2中,第二编程混合区18b关于第二移动段14b的限定已经是第二移动段14b长度的50%。因此,第二编程混合区18b保持不变,并且还构成所限定的第二混合区12b。然而,因为在图2中第三编程混合区18c关于第二移动段14b的限定超过50%(约75%),因此第三编程混合区12c关于第二移动段14b(但不关于第三移动段14c)的限定被减小到50%的平均值。
处理重叠的备选措施包括减小第二编程混合区18b和第三编程混合区18c中的最大值。在图2中,第三编程混合区18c大于第二编程混合区18b。因此,第二编程混合区18b关于第二移动段14b的限定保持不变,并且第三编程混合区18c关于第二移动段14b的限定减小,直到重叠被消除。
作为处理重叠的备选措施,一个或多个编程混合区18可以被优先化。如果例如第二编程混合区18b优先,则第二编程混合区18b保持不变(给定第二编程混合区18b关于两个连续移动段14a、14b中的每个移动段以从0至1的因数被限定)并且由此构成所限定的第二混合区12b。在这种情况下,优先级低于第二编程混合区18b的第三编程混合区18c,通过降低关于第二移动段14b的限定而降低,直到重叠被消除。
在上述三个示例中的每个示例中,混合区12b、12c将如图2中所示的被限定。如图2中所示,第二混合区12b关于第一移动段14a的限定大于50%,并且第三混合区12c被限定为椭圆。除了混合区12最大尺寸的可选限制外,混合区12仅受一个或两个相邻混合区12的尺寸的限制,并且最终受与最近点的距离的限制。通过独立地限定每个混合区12的区边界20,混合区12可以变得更大。
图3示意性地示出了图2中的移动路径10的混合区12内的移动段14的混合。在图3的示例中,当工业执行器执行移动路径10时,两个连续移动段14a、14b在第二混合区12b中被同时执行,并且两个连续移动段14b、14c在第三混合区12c中被同时执行。由于连续移动段14的同时执行,工业执行器遵循第二混合区12b中所限定的曲线22b和第三混合区12c中所限定的曲线22c(曲线22b、22c也可以用参考标号“22”表示)。在图3中的示例中,曲线22b、22b在相关联的移动段14的相应的对之间线性混合。
曲线22b、22c限定了相应的混合区12b、12c内的移动路径10。所限定的移动路径10是相同的,与沿着移动路径10的工业执行器的速度和加速度无关。移动路径10的几何形状与工业执行器的动力被独立地限定。动态耦合(例如沿着移动路径10的工业执行器的速度和加速度)可以在第二步中被生成以限定移动轨迹。然而混合区12内的移动路径10可以以各种方式混合。替代曲线22,移动路径10例如可以在混合区12内采用各种多边形形状。每个混合区12内的移动路径10可以备选地被称为转角路径。
如图3中所示,当由工业执行器执行移动路径10时,移动路径10在第一点16a开始并且在第四点16d结束,或者在第四点16d开始并且在第一点16a结束。因为第一点16a和第四点16d是停止点,因此工业执行器在这些点上完全停止。然而,由于混合区12b和混合区12c,工业执行器被允许飞越第二点16b和第三点16c。从而使移动路径10更加平滑,并且可以减少或消除沿着移动路径10的加速和减速阶段。因此,可以提高工业执行器的速度,并且可以减少工业执行器的机械部件的磨损。
图4示意性地示出了根据本发明的一个实施例的包括工业执行器26、外部设备28和控制系统30的执行器系统24的侧视图。在图4的示例中,工业执行器26例如是工业机器人。外部设备28例如是包括重新定向工作台32的外部执行器。然而,外部设备28例如备选地可以由附加的工业机器人构成。
如箭头34所示,外部设备28被配置为围绕与图4的平面垂直的轴线旋转工作台32。然而,工作台32可以在两个或多个轴线上移动,诸如多达六个轴。对象36被固定到工作台32。工业执行器26包括用于对对象36执行处理操作的工具38(例如焊接工具)。
控制系统30被配置为控制根据本发明的工业执行器26并且选择性地控制外部设备28。控制系统30包括数据处理设备40(例如中央处理单元,CPU)和存储器42。计算机程序被存储在存储器42中。计算机程序包括程序代码,当由数据处理设备40执行时,使数据处理设备40执行以下步骤:将移动路径10限定为多个连续移动段14的序列,其中每个移动段14被限定在两个点16之间;限定与移动路径10的两个连续移动段14之间的点16中的一个点相关联的至少一个混合区12,其中混合区12关于与点16相关联的两个连续移动段14中的每个移动段被独立地限定;以及命令工业执行器26执行移动路径10,包括笛卡尔定位混合区12、外部设备混合区和/或定向混合区。在图4的示例中,控制系统30借助信号线44与工业执行器26和外部设备28通信。
图4进一步指示用于参考目的的笛卡尔坐标系的垂直轴线46和第一水平轴线48。然而工业执行器26和外部设备28可以在空间中任意定向。
图5示意性地示出了根据本公开的一个实施例的与点16b相关联的移动路径10和三个混合区12b、50b、52b。除了结合图2和图3所述的笛卡尔定位混合区12b,图5中的示例的移动路径10包括两个附加混合区50b、52b。附加混合区50b由外部设备混合区(也可以用参考标号“50”表示)构成并且附加混合区52b由定向混合区(也可以用参考标号“52”表示)。三个混合区12b、50b、52b中的每个混合区可以关于与点16b相关联的两个连续移动段14a、14b中的每个移动段被独立地限定,如结合图2和图3中的混合区12所述。因此,三个混合区12b、50b、52b中的每个混合区可以并行处理。图5进一步示出了该示例的对象36包括在其顶面56与其垂直侧面58之间的曲线轮廓54。移动路径10的编程可以在工作台32的坐标系(未示出)中进行。
在由工业执行器26执行移动路径10期间,当工业执行器26到达与点16b相关联的外部设备混合区50b时,例如当工业执行器26到达外部设备混合区50b的两个区边界60b1、60b2(区边界60b1、60b2也可以用参考标号“60”表示)中的一个区边界时,启动与点16b相关联的外部设备28的操作。此外,在由工业执行器26执行移动路径10期间,当工业执行器26到达与点16b相关联的定向混合区52b时,例如当工业执行器26到达定向混合区52b的两个区边界62b1、62b2(区边界62b1、62b2也可以用参考标号“62”表示)中的一个区边界时,工具38朝向与点16b相关联的工具38的定向的重新定向被启动。
在图5的示例中,外部设备混合区50b是最外层的混合区,定向混合区52b是中间混合区,并且笛卡尔定位混合区12b是内部混合区。然而,混合区12b、50b、52b的顺序可以不同地设置,并且混合区12b、50b、52b中的两个或多个混合区可以部分地或完全地重叠。特别地,笛卡尔定位混合区12b可以被限定为内部混合区,并且外部设备混合区50b和定向混合区52b可以被限定为公共外部混合区。
图6a至图6f示意性地示出了图5中的移动路径的执行的各个阶段。移动路径10的执行与对象36上的工具38的处理操作有关。处理操作可以由焊接操作构成,其中可能需要保持焊接点处的表面基本水平和/或工具38基本垂直于对象36的表面。然而,为了清楚地展示混合区12、50、52的特性,在图6a至图6f中,对象36的焊接点处的表面并非始终保持完全水平,并且工具38并非始终保持与对象36的表面完全垂直。
在图6a中,工具38沿着移动段14a移动。对象36的顶面56被水平地定向。第一移动段14a部分地跟随对象36的顶面56(直到笛卡尔定位混合区12b的区边界20b1)。工具38与对象36的顶面56垂直被定向。
如图6b中所示,当工具38通过外部设备混合区50b的区边界60b1时,外部设备28启动工作台32朝向与点16b相关联的90°的旋转。工具38仍然跟随对象36的顶面56,并且工具38被保持在与顶面56垂直的定向上。
如图6c中所示,当工具38通过定向混合区52b的区边界62b1时,工业执行器26启动工具38的重新定向,如箭头64所示,朝向与点16b相关联的工具38的90°定向(在工作台32的坐标系中)。可以从图6c中看出,工具38的定向相对于对象36的上表面56的先前的垂直定向开始略微偏离。
如图6d中所示,工具38跟随笛卡尔定位混合区12b的曲线22b,该曲线符合在上表面56与侧面58之间的对象36的曲线轮廓54。此外,在图6d中,工作台32朝向与点16b相关联的90°旋转进行了一半(即45°),并且工具38朝向与点16b相关联的工具38的90°定向的重新定向已经进行了一半(即45°)。
如图6e中所示,在工具38到达定向混合区52b的区边界62b2的同时,工具38的定向达到与点16b相关联的工具38的90°定向。
如图6f中所示,在工具38到达外部设备混合区50b的区边界60b2的同时,工作台32的旋转达到与点16b相关联的工作台32的90°定向。
根据图6a至图6f中的示例的混合区12、50、52的灵活限定。因此可以有助于减小涉及工业执行器26的操作的循环时间(例如,如果工具38的重新定向和/或外部设备28的操作相对较慢)。混合区12、50、52的限定还有助于处理操作的提高的性能,例如通过保持表面水平和/或通过保持工具38垂直。
尽管已经参考示例性实施例描述了本公开,但是应该理解的是,本发明不限于上述内容。例如,应该理解的是,部件的尺寸可以根据需要而改变。
- 用于控制工业执行器的方法和控制系统
- 一种基于滤波的工业控制系统执行器参数估计方法