一种基于高分辨率光学遥感图像的储油罐检测方法
文献发布时间:2023-06-19 09:57:26
技术领域
本发明属于光学遥感图像处理领域,具体涉及一种基于高分辨率光学遥感图像的储油罐检测方法。
背景技术
近年来,随着高分辨率光学卫星遥感影像相关技术的快速发展、卫星拍摄频次的增多以及遥感图像分辨率的提升,国内外研究团队获得到更多更可靠的数据支撑,在物体检测领域取得了大量成果。在这些成果中,对地面上自然形成或人造的物体(如储油罐等)进行识别作为一个有挑战性的研究而被从业人员广为关注。储油罐是在石油、天然气和石化行业中使用的设备,用于储存在环境温度下为液态的原油或者化工产品。由于储油罐要存储的材料的类型不同,因此储油罐本身具有不同的顶部形状和尺寸大小。
对于油罐检测算法,国内外研究人员已经取得很多成果。对明亮的固定顶圆形油罐进行检测。针对合成孔径雷达(SAR,Synthetic Aperture Radar)图像,具有较高的检测精度和较低的误报率。
随着机器学习和卷积神经网络(CNN,Convolutional Neural Network)技术的迅速发展,许多基于CNN的模型在油罐检测中表现出较好的结果。在此类模型的应用中,首先提取一组可以描述对象的特征,然后对提取到的特征进行分类。根据上述方法,油罐检测过程基本可以分为三个阶段:候选对象检测,特征提取和分类。
在深度学习的领域中,Girshick等提出了基于区域卷积神经网络和升级版本FastR-CNN,取得了较高的检测精度。Ren和Girshick等人又提出了Faster R-CNN(FasterRegion-based Convolutional Neural Networks)算法,进一步提高了目标检测效果,但仍存在检测速度缓慢的弊端。在检测的速度和准确率上都取得了较好效果。在此基础上Bochkovskiy等于2020年发布的YOLOv4对YOLOv3提出了五种改进方式和二十余个技巧,在平均精度和速度上也远超YOLOv3版本,但在储油罐检测工程化应用中仍存在适用性不足的问题。
发明内容
本发明提供一种基于高分辨率光学遥感图像的储油罐检测方法,针对固定顶和外浮顶油罐的识别与分类,以及对外浮顶油罐的原油储量分析。
本发明通过以下技术方案实现:
一种基于高分辨率光学遥感图像的储油罐检测方法,所述储油罐检测方法包括以下步骤:
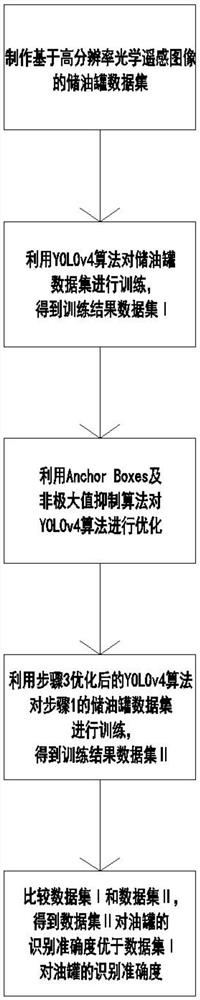
步骤1:制作基于高分辨率光学遥感图像的储油罐数据集;
步骤2:利用YOLOv4算法对储油罐数据集进行训练,得到训练结果数据集Ⅰ;
步骤3:利用Anchor Boxes及非极大值抑制算法对YOLOv4算法进行优化;
步骤4:利用步骤3优化后的YOLOv4算法对步骤1的储油罐数据集进行训练,得到训练结果数据集Ⅱ;
步骤5:比较数据集Ⅰ和数据集Ⅱ,得到数据集Ⅱ对油罐的识别准确度优于数据集Ⅰ对油罐的识别准确度。
进一步的,所述步骤1具体为,数据集由NWPU VHR-10数据集、DOTA数据集、RSOD数据集、AID数据集以及基于吉林一号光学遥感影像组成;
对确定的数据集使用LabelImg工具进行标注生成xml文件,根据Edge Box检测率方法,将数据集的difficult属性分成easy、medium和hard三类;再将数据集转换为VOC格式,分别将图片文件和标注文件迁移到对应的目录中;在训练数据前,执行./scripts/voc_label.py文件,数据将转换为适合与YOLOv4算法一起使用的单独的TXT格式。
进一步的,所述步骤3AnchorBoxes的优化具体为,
调用YOLOv4的calc_anchor命令行指令,调整-num_of_clusters参数,分别得到不同k值对应的Anchor Boxes的宽高和IoU值;
通过IoU值计算出IoU的变化率。
进一步的,所述步骤3非极大值抑制的优化具体为,在非极大值抑制算法中使用DIoU作为消除冗余边界框的标准,对于对象被遮挡的情况下,具有更好的效果;
所述DIoU具体为,在优化损失函数的过程中,YOLOv4使用边界框回归的方式,传统的IoU损失公式如公式1
在两个候选框完全不相交的情况下,IoU的值始终为1,无法给出优化方向;GIoU针对公式1进行了优化,如公式2
其中,C表示包含两个框的最小矩形;
使用基于距离的IoU即DIoU代替GIoU,对于不同距离、方向、面积和比例的预选框都能做到较好的回归,如公式3
其中,b和b
在训练图像前,将./cfg/yolov4-custom.cfg文件中nms_kind参数设置为“diounms”代替默认的NMS算法GreedyNMS。
进一步的,所述步骤5具体为,将使用Average IoU、F1分数、mAP值来进行模型比较;
IoU表示实际边界框与预测边界框的交并比,如公式4所示
其中,全部数据集中平均的IoU值为Average IoU;
F1分数是精确率和召回率的调和平均数,在两者之间维持平衡;精确率即为查准率,代表正确预测为正的占全部预测为正的比例,如公式5所示
其中,TP代表正确预测为正的个数,FP代表错误预测为正的个数;召回率即为查全率,代表正确预测为正的占全部实际为正的比例,如公式6所示,
其中,FN代表错误预测为负的个数;F1分数如公式7所示,
AP即平均精度,是一种将精确率和召回率相结合,用来给检索结果做排名的度量方式;MAP为平均的平均精度,或为多个类别的平均精度的平均值,即为固定顶储油罐和外浮顶储油罐。
本发明的有益效果是:
在每个指标上面均提高了性能。通过使用k-means进行Anchor box优化在测试数据集中提供了96.64%的mAP值,优于原YOLOv4算法94.80%的mAP值,提升了1.84%;在此基础上使用DIoU-NMS进行非极大值抑制,达到了最优检测结果,为96.94%,较原算法提升2.14%。
本发明通过最大程度上的提升识别遥感影像中储油罐位置的精度,进而通过对原油储量的计算和回归分析,可以证明出遥感数据在能源期货领域的巨大的应用价值。
附图说明
图1本发明的流程示意图。
图2本发明的K-means聚类与IoU变化率统计图。
具体实施方式
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种基于高分辨率光学遥感图像的储油罐检测方法,所述储油罐检测方法包括以下步骤:
步骤1:制作基于高分辨率光学遥感图像的储油罐数据集;
步骤2:利用YOLOv4算法对储油罐数据集进行训练,得到训练结果数据集Ⅰ;
步骤3:利用Anchor Boxes及非极大值抑制算法对YOLOv4算法进行优化;
步骤4:利用步骤3优化后的YOLOv4算法对步骤1的储油罐数据集进行训练,得到训练结果数据集Ⅱ;
步骤5:比较数据集Ⅰ和数据集Ⅱ,得到数据集Ⅱ对油罐的识别准确度优于数据集Ⅰ对油罐的识别准确度。
进一步的,所述步骤1具体为,在数据集的选择中,由于带阴影的储油罐较为特殊,现有的大型遥感图像数据集中的储油罐均不包含阴影;因此所使用的带阴影的储油罐的数据集需重新制作,数据集由NWPU VHR-10数据集、DOTA数据集、RSOD数据集、AID数据集以及基于吉林一号光学遥感影像组成;
数据集中共包含585张遥感图像,通过顺时针旋转60°、90°、180°和270°扩充至2925幅,共包含34330个固定顶油罐和15190个外浮顶油罐,共计49520个储油罐,其中20%作为测试集,20%作为验证集,其余60%作为训练集;
对确定的数据集(数据集=测试集+验证集+训练集)使用LabelImg工具进行标注生成xml文件,根据Edge Box检测率方法,将数据集的difficult属性分成easy、medium和hard三类;再将数据集转换为VOC格式,分别将图片文件和标注文件迁移到对应的目录中;在训练数据前,执行./scripts/voc_label.py文件,数据将转换为适合与YOLOv4算法一起使用的单独的TXT格式。
进一步的,所述步骤3Anchor Boxes的优化具体为,
调用YOLOv4的calc_anchor命令行指令,调整-num_of_clusters参数,分别得到不同k值对应的Anchor Boxes的宽高和IoU值,k值与Anchor boxes对应关系如表1所示;
表1不同K值对应的先验框宽高
Table1 Width and height of anchor boxes corresponding to different kvalues
通过IoU值计算出IoU的变化率,如图1所示,随着k值的增大,IoU及其变化率趋于稳定,在k≥5时,得到好的先验框结果;随着k值的增加,先验框结果大小较为接近,因此取k=5,即5个聚类中心,既减少候选框带来的误差,也加快算法的收敛速度。
在训练集上与k=5对应的先验框宽高分别为(18,20),(29,28),(47,47),(81,80)和(173,172)。
进一步的,所述步骤3非极大值抑制的优化具体为,非极大值抑制算法(NMS,Non-maximum Suppression)用于确保出现在多个候选框中的物体仅被计算一次,滤出其他可预测同一对象的边界框,保留最高的置信度;在非极大值抑制算法中使用DIoU作为消除冗余边界框的标准,对于对象被遮挡的情况下,具有更好的效果;
所述DIoU具体为,在优化损失函数的过程中,YOLOv4使用边界框回归的方式,传统的IoU损失公式如公式1
该算法存在明显的缺点,即在两个候选框完全不相交的情况下,IoU的值始终为1,无法给出优化方向;GIoU针对这个问题进行了优化,如公式2
在这里C表示包含两个框的最小矩形,可以对两框不相交的情况进行优化,而两个候选框完全相交时,GIoU损失则退化到IoU损失,收敛速度同样会减慢;
针对这样的情况;使用基于距离的IoU即DIoU代替GIoU,对于不同距离、方向、面积和比例的预选框都能做到较好的回归,如公式3
b和b
DIoU有以下优点:
1.在预选框与目标框不重叠时,可以为预选框提供移动方向。
2.最小化两个目标框的距离,收敛速度快。
3.对于包含两个框在水平和垂直两个方向上的情况,回归速度快。
在训练图像前,将./cfg/yolov4-custom.cfg文件中nms_kind参数设置为“diounms”代替默认的NMS算法GreedyNMS。
进一步的,所述步骤4具体为,
实验将在CPU为Intel Core i7-9700,GPU为NVIDIA GeForce RTX 2060(ComputeCapability=7.5,1920 CUDA Cores),内存为16GB,操作系统为Ubuntu 18.04的机器上运行。
对数据集进行训练时,在./cfg/yolov4-custom.cfg文件中设置初始学习速率learning_rate=1,最大批次max_batches=20000,即训练20000次后会自动停止,动量momentum=0.95,权重衰减decay=0.0005,图片的大小为416*416。
算法在训练过程中使用单GPU在64个批处理大小(batch=64)下进行多尺度训练。
进一步的,所述步骤5具体为,将使用Average IoU、F1分数、mAP值来进行模型比较;
IoU(Intersection over Union)表示实际边界框(B
Average IoU指在全部数据集中平均的IoU值。
F1分数(F1-Score)是精确率和召回率的调和平均数,在两者之间维持平衡;精确率(Precision)即为查准率,代表正确预测为正的占全部预测为正的比例,如公式5所示
其中TP代表正确预测为正(True Positive)的个数,FP代表错误预测为正(FalsePositive)的个数。召回率(Recall)即为查全率,代表正确预测为正的占全部实际为正的比例,如公式6所示
其中FN代表错误预测为负(False Negative)的个数。F1分数如公式7所示
AP(Average Precision)即平均精度,是一种将精确率和召回率相结合,用来给检索结果做排名的度量方式;MAP(Mean Average Precision)为平均的平均精度,或为多个类别的平均精度的平均值,在本实验中为两个类别:即为固定顶储油罐和外浮顶储油罐。
- 一种基于高分辨率光学遥感图像的储油罐检测方法
- 基于旋转不变HOG特征的高分辨率光学遥感图像目标检测方法