激光共聚焦多点测高系统及测高方法
文献发布时间:2023-06-19 10:02:03
技术领域
本发明涉及精密光学仪器测量系统技术领域,尤其涉及一种激光共聚焦多点测高系统及测高方法。
背景技术
参见附图1,激光共焦测量是基于共焦成像原理实现的。点光源P位于准直物镜L1的焦点上,发出的平行光经分光镜分光进入成像物镜L2,在L2的焦点上成点光源P的像,即图1中待测样品P'。准直物镜L1的焦距为F1, 准直物镜L2的焦距为F2,当被测件(试样)表面位于L2的焦面上时(物距D1=F2),入射光原路返回,过分光镜和另一准直物镜L3后,在L3的焦点上成点光源P的第二次成像,即图1中探测器P''。只有当P,P',P''在各自光学元件的焦点位置上,才成立共轭的成像关系,这就称为共焦成像。
在此基础上,申请人早些时候申请了专利:“激光共聚焦测高系统及测高方法”(申请号:202010467720.4 ),通过实现单点测高,也可以直接分辨检测点的表面特征是凸起还是凹陷。其测试点单一,面对表面特征单一的待测物时,操作简单,效果直观,但对于表面特征多样,测试面积较大的样品则需要多次测量,导致测试时间长,操作复杂,不利于提高效率。
发明内容
本发明的目的是为了解决上述问题,提供一种激光共聚焦多点测高系统及测高方法,针对待测面的实际分布通过微透镜阵列来实现更换测试范围,实现同时测量多个不同点的特征信息。
本发明采取的技术方案是:
一种激光共聚焦多点测高系统,其特征是,包括激光光源和共聚焦直线光路,所述共聚焦直线光路包括成像CMOS、成像后镜组、分光棱镜、成像前镜组和待测物面,所述激光光源通过准直镜向分光棱镜发射激光,所述激光的入射方向与共聚焦直线光路垂直,在所述激光光路的准直镜前方,设置微透镜阵列和第一分光镜,激光入射光位于第一分光镜的透光光路上,在所述第一分光镜的分光光路上设置第二分光镜,在所述第二分光镜的透光光路和分光光路上,分别设置正离焦PMT组和负离焦PMT组,在正离焦PMT组的光路上的正离焦位置设置正离焦小孔组,在负离焦PMT组的光路上的负离焦位置设置负离焦小孔组,所述微透镜阵列包括多个阵列排布的凸透镜,所述正离焦PMT组、负离焦PMT组、正离焦小孔组和负离焦小孔组的各特征数量和排列与微透镜阵列相对应。
进一步,在所述第一分光镜与共聚焦直线光路之设置主镜组。
进一步,所述第一分光镜与激光光路呈45度夹角,所述第二分光镜与第一分光镜平行布置。
进一步,所述第一分光镜和第二分光镜位于靠近所述主镜组的一侧。
进一步,所述微透镜阵列的凸透镜为4个,呈正方形排列,正负离焦PMT组和正负离焦小孔组也呈正方形布置。
一种激光共聚焦多点测高方法,其特征是,包括如下步骤:
(1)根据待测物面确定微透镜阵列及其排布;
(2)在待测物面位置设置平面标定板,调节平面标定板的水平位置,使多个正离焦PMT组和负离焦PMT组都能接收到能量且能量值最大,记能量最大值为E0,将此时的平面标定板的位置定为零点d0;
(3)将待测物面置于零点;
(4)通过测高系统获取待测物面的表面信息;
(5)根据正离焦PMT组和负离焦PMT组的各PMT的能量信息发生的变化,判断待测物面的各对应部位的表面状态:
a:当正离焦PMT组的PMT上能量不变而对应的负离焦PMT组的PMT上能量变小,则待测物面对应的表面为凹陷;
b:当负离焦PMT组的PMT上能量不变而对应的正离焦PMT组的PMT上能量变小,则待测物面对应的表面为凸起。
进一步,在步骤(2)中,还包括计算检测精度的步骤:将标定板从零点位置调整至d1位置,记录d1位置正离焦PMT组或负离焦PMT组中的一个PMT的表面能量值E1,则在平面标定板的移动位置范围内测高系统的检测精度为σ=(E1-E0)/(d1-d0)。
本发明的有益效果是:
(1)测试范围可达到±1.5mm,测试精度可达到微米级;
(2)实现同时测量多个不同点的特征信息,并且同时判断其表面特征;
(3)增加了组合小孔,降低了杂散光对系统精度的影响;
(4)当配合运动系统进行扫描测量时,可快速实现多点同时测量,大大提高了工作效率。
附图说明
附图1是共焦成像原理结构示意图;
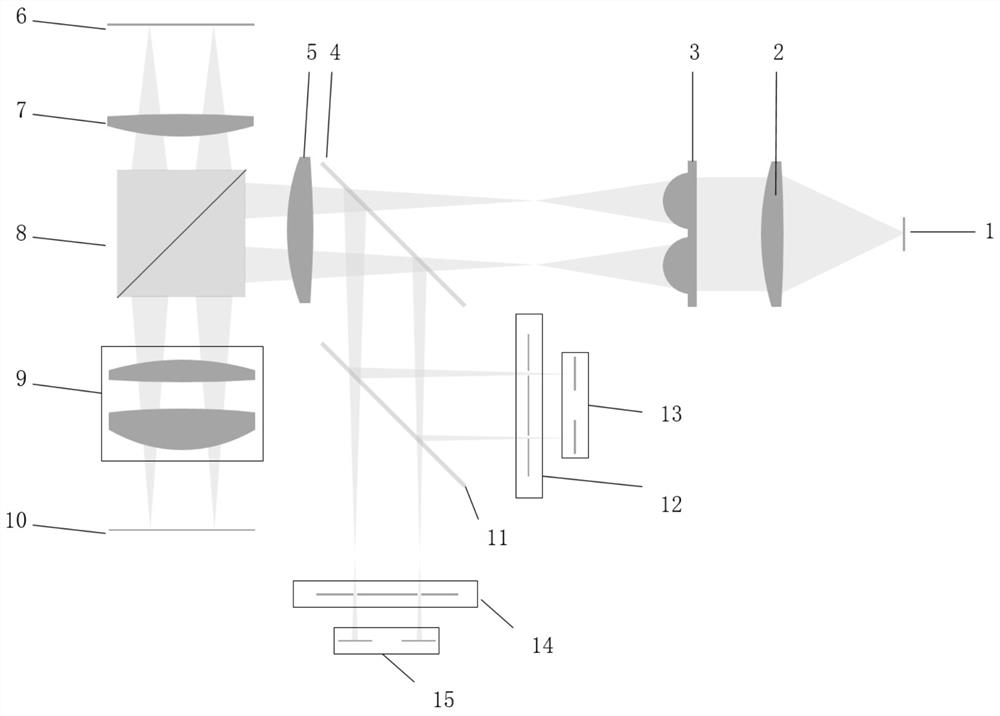
附图2是本发明的测高系统原理结构示意图;
附图3是正负离焦小孔组示意图;
附图4是本发明的测高方法流程示意图。
附图中的标号分别为:
1.激光光源; 2.准直镜;
3.微透镜阵列; 4.第一分光镜;
5.主镜组; 6.成像CMOS;
7.成像后镜组; 8.分光棱镜;
9.成像前镜组; 10.待测物面;
11.第二分光镜; 12.正离焦小孔组;
13.正离焦PMT组; 14.负离焦小孔组;
15.负离焦PMT组。
具体实施方式
下面结合附图对本发明激光共聚焦多点测高系统及测高方法的具体实施方式作详细说明。
参见附图2,激光共聚焦多点测高系统,包括激光光源1和共聚焦直线光路,共聚焦直线光路包括成像CMOS6、成像后镜组7、分光棱镜8、成像前镜组9和待测物面10,激光光源1通过准直镜2向分光棱镜8发射激光,激光的入射方向与共聚焦直线光路垂直。
在激光光路的准直镜2前方,设置微透镜阵列3、第一分光镜4和主镜组5,激光入射光位于第一分光镜4的透光光路上,在第一分光镜4的分光光路上设置第二分光镜11,在第二分光镜11的透光光路和分光光路上,分别设置正离焦PMT组13和负离焦PMT组15,在正离焦PMT组13的光路上的正离焦位置设置正离焦小孔组12,在负离焦PMT组15的光路上的负离焦位置设置负离焦小孔组14,微透镜阵列3包括多个阵列排布的凸透镜,正离焦PMT组13、负离焦PMT组15、正离焦小孔组12和负离焦小孔组14的各特征数量和排列与微透镜阵列3相对应。
第一分光镜4与激光光路呈45度夹角,第二分光镜11与第一分光镜4平行布置。第一分光镜4和第二分光镜11位于靠近主镜组5的一侧,即位于微透镜阵列3焦点的外侧。
参见附图3,微透镜阵列3上排布的凸透镜的数量和位置根据待测物面10的实际情况决定,常规设计为4个,呈正方形排列,对应的正负离焦PMT组15和正负离焦小孔组14也呈正方形布置。
本系统中应用的成像CMOS6根据实际待测物面10的大小选择合适该系统的CMOS6大小,其尺寸应大于光学系统的视场尺寸。成像CMOS6的尺寸选为为成像镜头兼容的尺寸大小。正离焦PMT组13的正离焦位置和负离焦PMT组15的负离焦位置距离焦点的距离应该根据小孔大小以及镜头NA来计算,正离焦小孔组12和负离焦小孔组14的小孔的通光口径应根据实际应用和高度灵敏度来确定。
参见附图2,以四阵列微透镜进行光路说明,激光光源1发出激光光线,经过准直镜2准直到达微透镜阵列3,光线经过微透镜阵列3分成4束光线,聚焦后再扩散,该4束光同时经过第一分光镜4和主镜组5到达分光棱镜8后再经过成像前镜组9,当光线到达待测物面10后,经过反射,光线携带表面特征信息经过成像镜组再经过分光棱镜8,一半光线进入成像后镜组7到达成像CMOS6,此时成像COMS6成像记录待测物面10四个点的成像特征,经过分光棱镜8的该四束光线各自的另一半光线则进入主镜组5到达第一分光镜4表面,第一分光镜4与主光路夹角45°倾斜放置,经过第一分光镜4分光后再次分光到达第二分光镜11表面,第二分光镜11也是与主光路夹角45°倾斜放置,此时光线再一次被分光,一部分光线进入正离焦小孔组12,被正离焦PMT组13接收,一部分光线进入负离焦小孔组14,被负离焦PMT组15接收。正负离焦PMT组15的PMT与微透镜阵列3的透镜一一对应。
参见附图4,激光共聚焦多点测高方法包括如下步骤:
(1)根据待测物面10确定微透镜阵列3及其排布;
(2)在待测物面10位置设置平面标定板,调节平面标定板的水平位置,使多个正离焦PMT组13和负离焦PMT组15都能接收到能量且能量值最大,记能量最大值为E0,将此时的平面标定板的位置定为零点d0;将标定板从零点位置调整至d1位置,记录d1位置正离焦PMT组13或负离焦PMT组15中的一个PMT的表面能量值E1,则在平面标定板的移动位置范围内测高系统的检测精度为σ=(E1-E0)/(d1-d0);
(3)将待测物面10置于零点;
(4)通过测高系统获取待测物面10的表面信息;
(5)根据正离焦PMT组13和负离焦PMT组15的各PMT的能量信息发生的变化,判断待测物面10的各对应部位的表面状态:
a:当正离焦PMT组13的PMT上能量不变而对应的负离焦PMT组15的PMT上能量变小,则待测物面10对应的表面为凹陷;
b:当负离焦PMT组15的PMT上能量不变而对应的正离焦PMT组13的PMT上能量变小,则待测物面10对应的表面为凸起。
在实际测量过程中,是实现一个相对测量的过程,所以必须进行严格的调零。在测试之前,确定好待测物面10选用的微透镜以及对应的光学部件和PMT相关部件,按步骤(2)的方式确定零点,所有的凸起和凹陷都是相对这个零点来定义,选择一个平板进行标定,调整标定平板到待测物面10,沿光轴方向调整该平板位置,此时两组总共8个PMT都能接收到能量。当标定板刚好在焦点位置时,正负离焦PMT能量都应该保持最大,根据该特性找到该测高系统的最佳焦面。移动标定平板,当正离焦PMT组13能量保持不变,负离焦PMT组15能量变小,表示此时标定平板正在做负离焦;当负离焦PMT组15能量保持不变,正离焦能量变小,表示此时标定平板正在做正离焦。在移动标定平板的过程中,找到能量最大点,该位置为焦点位置。记录最大值E0;再调整标定板,改变位置d(标定任意量程范围内高度即可),记录该位置PMT检测到的能量E1。可得到d范围内测试能量变化为ΔE,则该系统计算检测精度为σ=ΔE/d。
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 激光共聚焦多点测高系统及测高方法
- 激光共聚焦多点测高系统