一种动态万向传动装置可靠性试验台
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及一种属于精密制造技术和自动化控制领域的试验装置,更确切地说,本发明涉及一种动态万向传动装置可靠性试验台。
背景技术
万向传动装置因具有在两轴之间夹角和距离经常变化的情况下仍能可靠地传递动力的优点,在机械传动领域中应用广泛,尤其在汽车行业中,万向传动装置是传动系统的重要组成部分
万向传动装置的可靠性直接影响到传动系统的可靠性以及产品的质量,其可靠性是指在工作过程中受到规定扭矩不失效的能力,万向传动装置的失效形式包括整体断裂、塑性变形、表面磨损、疲劳破坏等,其中疲劳破坏占有相当比例。对万向传动装置进行可靠性试验,依据数据分析提出改进措施提高万向传动装置可靠性的一条有效途径,对机械传动领域具有重大意义。
目前,国内的万向传动装置的可靠性试验多为对静扭转刚度、静扭转强度的静态试验装置及试验方法,不具备模拟万向传动装置动态工况的能力。
发明内容
本发明所要解决的技术问题是克服了万向传动装置疲劳破坏的问题,提供了一种具备多角度变扭矩动态万向传动装置可靠性试验台。
为解决上述技术问题,本发明是采用如下技术方案实现的:所述的一种动态万向传动装置可靠性试验台包括支承系统、进给系统、旋转俯仰系统、加载系统与监测控制系统;
所述的支承系统通过其中的1号试验台框架与2号试验台框架水平地安装在地基上;进给系统中的纵向进给系统通过其中的纵向平台固定安装在支承系统中的1号试验台上,进给系统中的横向进给系统通过其中的横向平台安装在纵向进给系统中的套装在纵向导轨副上的4个结构相同的纵向滑块的顶端面上;旋转俯仰系统通过旋转俯仰工作台安装在横向进给系统中的4个结构相同的横向滑块的顶端上;加载系统的一端通过其中的3号电机支座、1号轴承、2号轴承安装在旋转俯仰系统中的俯仰箱上,加载系统的另一端通过其中的法兰轴支座、测功机安装在支承系统中的2号试验台上,监测控制系统和进给系统、旋转俯仰系统、加载系统电线连接。
技术方案中所述的支承系统还包括4个结构相同的1号地脚座与4个结构相同的2号地脚座;1号试验台框架与2号试验台框架皆为长方体形的由空心方钢管焊接而成的框架式结构件,1号试验台框架与2号试验台框架并排放置,1号试验台框架与2号试验台框架的纵向对称面相平行;1号试验台采用螺栓固定联接在1号试验台框架的顶端,2号试验台采用螺栓固定连接在2号试验台框架的顶端,1号试验台与2号试验台处于不同的水平面内,并且2号试验台高于1号试验台;4个结构相同的1号地脚座通过其中的1号螺杆固定在1号试验台框架中的4根支撑腿的底端,4个结构相同的2号地脚座通过其中的2号螺杆固定在2号试验台框架中的4根支撑腿的底端,1号地脚座与2号地脚座结构相同。
技术方案中所述的纵向进给系统还包括1号电机、1号电机支座、纵向滚珠丝杠副前座、纵向滚珠丝杠副、纵向滚珠丝杠副后座与纵向联轴器;所述的纵向平台采用T形螺栓固定在1号试验台上,1号电机支座采用螺栓固定连接在纵向平台一侧的中间处;1号电机采用螺栓固定安装在1号电机支座上,1号电机的输出轴与联轴器的一端键联接,联轴器的另一端与纵向滚珠丝杠副中的纵向螺杆的一端键联接,纵向滚珠丝杠副前座采用螺钉固定安装在纵向平台上,纵向滚珠丝杠副前座位于1号电机支座的里侧,纵向螺杆的一端光轴与纵向滚珠丝杠副前座上的角接触球轴承内环过渡配合,纵向螺杆的另一端的光轴与纵向滚珠丝杠副后座上的角接触球轴承内环过渡配合,纵向滚珠丝杠副后座采用螺钉固定安装在纵向平台另一侧的上端面上,纵向螺杆的回转轴线与1号电机输出轴的回转轴线共线,纵向丝母套装在纵向螺杆上,两者之间为转动连接,纵向丝母采用螺钉固定安装在横向平台上的纵向丝母座上;纵向导轨副中的两条结构相同的纵向导轨采用螺钉固定安装在纵向平台上,两条结构相同的纵向导轨平行对称地位于纵向螺杆的两侧;4个结构相同的纵向滑块采用螺钉固定安装在横向平台底端面的四角处的螺钉孔上,4个结构相同的纵向滑块的下端与两条结构相同的纵向导轨套装,两者之间为滑动联接。
技术方案中所述的横向进给系统还包括横向导轨副、2号电机、2号电机支座,横向滚珠丝杠副前座、横向滚珠丝杠副、横向滚珠丝杠副后座与横向联轴器;2号电机采用螺栓固定安装在2号电机支座上,2号电机支座采用螺栓固定安装在横向平台一侧的中间处,2号电机的输出轴与横向联轴器的一端连接,横向联轴器的另一端与横向滚珠丝杠副中的横向螺杆的一端键连接,横向滚珠丝杠副前座采用螺钉固定在横向平台一侧的上端面上,横向滚珠丝杠副前座位于2号电机支座的里侧;横向螺杆一端的光轴与横向滚珠丝杠副前座上的角接触球轴承内环过渡配合,横向螺杆另一端的光轴与横向滚珠丝杠副后座上的角接触球轴承内环过渡配合,横向滚珠丝杠副后座采用螺钉固定在横向平台另一侧的上端面上,横向螺杆的回转轴线与2号电机输出轴的回转轴线共线,横向丝母套装在横向螺杆上,两者之间为转动连接,横向丝母采用螺钉固定安装在旋转俯仰工作台上的横向丝母座上;横向导轨副中两条结构相同的横向导轨采用螺钉固定安装在横向平台上,两条结构相同的横向导轨平行对称地位于横向螺杆的两侧;4个结构相同的横向滑块采用螺钉固定安装在旋转俯仰工作台底端面的四角处的螺钉孔处,4个结构相同的横向滑块的下端与两条结构相同的横向导轨套装,两者之间为滑动联接。
技术方案中所述的旋转俯仰系统还包括4号电机支座、4号电机、2个结构相同的俯仰支座、俯仰轴、双耳油缸、1号双耳油缸支座、环形滑块、环形导轨、旋转工作台、直齿圆柱齿轮与伺服油路;所述的旋转俯仰工作台采用螺栓安装在横向进给系统中的4个结构相同的横向滑块的顶端,环形导轨采用螺栓固定安装旋转俯仰工作台上表面的中心处,环形滑块采用螺栓固定安装在旋转工作台底端面的中心处,环形滑块安装在环形导轨上,环形滑块与环形导轨之间为套装滑动连接;2个结构相同的俯仰支座采用螺栓平行对称地固定安装在旋转工作台的上端面上,俯仰轴的两端安装在2个结构相同的俯仰支座上的1号俯仰轴通孔内,两者之间为转动连接,俯仰箱通过其上的2号俯仰支座套装在俯仰轴上,两者之间为转动连接;4号电机支座通过其中的安装底座并采用螺钉固定在旋转俯仰工作台一侧边的端面上,4号电机采用螺栓固定安装在4号电机支座的支撑壁上,4号电机输出轴的回转轴线与旋转工作台的回转中心线相平行,直齿圆柱齿轮套装在4号电机的输出轴上,两者之间采用键连接,直齿圆柱齿轮与旋转工作台周边上的轮齿啮合连接;1号双耳油缸支座安装在旋转工作台的上端面上,双耳油缸的缸体尾端与1号双耳油缸支座之间采用销轴连接,双耳油缸的活塞杆伸出端与俯仰箱上的2号双耳油缸支座采用销轴连接;伺服油路通过其中的伺服油路块固定安装在旋转工作台的上端面上,伺服油路块上的第二进油口P1与第二回油口T1分别和双耳油缸缸体上的进出油口A与进出油口B管道连接。
技术方案中所述的俯仰箱包括俯仰箱体与俯仰箱盖;所述的俯仰箱盖为长方形板类结构件,俯仰箱盖的周边均匀地设置有安装螺栓的通孔,俯仰箱盖上的安装螺栓的通孔与俯仰箱体箱壁顶端的螺纹盲孔相对正;所述的俯仰箱体为长方体形的空心箱体结构件,顶端为敞开式,底端为封闭式,俯仰箱体的顶端沿箱壁方向在四周的箱壁上均匀地设置有螺纹盲孔,俯仰箱体顶端上的螺纹盲孔和俯仰箱盖周边设置的通孔相对正;俯仰箱体左、右箱壁的中心处沿水平方向设置有采用1号轴承与2号轴承安装主轴的结构相同的回转轴线共线的1号通孔与2号通孔;俯仰箱体的箱底外底面上设置有2号俯仰支座与2号双耳油缸支座,2号俯仰支座的纵向长度与箱体纵向长度相同,2号俯仰支座上设置有与半圆形边缘同轴心的用于和俯仰轴配合的通孔;2号双耳油缸支座纵向对称面与箱体横向对称面重合,2号双耳油缸支座与双耳油缸配合,2号俯仰支座上设置有安装俯仰轴的通孔,所述的俯仰箱盖采用螺栓固定在俯仰箱体的顶端。
技术方案中所述的加载系统还包括3号电机、1号联轴器、2号联轴器、1号轴承盖、主轴、法兰盘、2号轴承盖与法兰轴;所述的3号电机采用螺栓与3号电机支座左端固定连接,3号电机支座采用螺栓固定在俯仰箱的左箱壁上;3号电机的输出轴与2号联轴器一端键连接,2号联轴器另一端与主轴的设置有键槽的一端键连接,主轴的左端轴颈与1号轴承内圈过渡配合,主轴的右端轴颈与2号轴承的内圈过渡配合,1号轴承与2号轴承的外圈分别与俯仰箱上的两主轴通孔过渡配合;俯仰箱上的2号俯仰支座与俯仰轴套装连接;1号轴承盖与2号轴承盖分别采用螺钉与俯仰箱的左右箱壁的外侧壁固定连接;法兰盘与主轴螺纹端套装连接,并采用螺母固定,法兰盘与扭矩传感器的一端通过螺栓固定连接,扭矩传感器另一端通过螺钉与被试件万向传动装置中的法兰盘固定连接,万向传动装置中的2号试件联接盘与法兰轴的法兰盘端通过螺栓固定连接,法兰轴的光轴段安装在法兰轴支座通孔中,法兰轴设置有键槽的光轴端与联轴器一端键连接,联轴器另一端与测功机的输出轴连接。
技术方案中所述的监测控制系统包括扭矩传感器、操作台、测功机内置扭矩传感器、双耳油缸磁致收缩位移传感器、西门子840Dsl系统、供电电源、计数器与控制模组;所述的控制模组包括输入输出模块,输入输出模块采用西门子72/48D 2/2A PN输入输出模块;控制模组布置在操作台中;所述的扭矩传感器采用英国产的型号为AML的扭矩传感器,扭矩传感器的接线端与输入输出模块的X3接口电线连接;所述的操作台上设置操作面板和交互性外设;交互性外设包括鼠标和键盘,操作面板固定在操作台上端部的前面板上,操作面板的接线端与西门子840Dsl系统的DPI电线连接,鼠标与键盘设置在操作台前面伸出部分的上端面,鼠标与键盘接线端分别和西门子840Dsl系统的USB接口电线连接;所述的供电电源的接线端与西门子840Dsl系统的X1接口电线连接;所述的计数器采用科德型号为TW-268的计数器,计数器通过螺钉与法兰轴支座固定联接,与法兰轴垂直,计数器的接线端与输入输出模块的X3接口电线连接;测功机内置扭矩传感器的接线端与模拟驱动接口模块的X1接口电线连接;西门子840Dsl系统安装在操作台内部;双耳油缸磁致收缩位移传感器的接线端与模拟驱动接口模块x4-1接口通过电线连接。
技术方案中所述的监测控制系统和进给系统、旋转俯仰系统、加载系统电线连接是指:
所述的监测控制系统包括控制模组;所述的控制模组包括输入输出模块、1号电机驱动模块、2号电机驱动模块、3号电机驱动模块、4号电机驱动模块与模拟驱动接口模块;所述的进给系统包括纵向进给系统与横向进给系统,纵向进给系统包括1号电机,横向进给系统包括2号电机;所述的旋转俯仰系统包括4号电机、伺服油路;伺服油路包括插装式电磁换向阀与高频响方向阀;所述的加载系统包括3号电机与测功机;所述的1号电机驱动模块的X1接口通过电机电缆与1号电机相连接,2号电机驱动模块的X1接口通过电机电缆与2号电机相连接;所述的4号电机驱动模块的X1接口通过电机电缆与4号电机相连接,模拟驱动接口模块的X3接口通过电线与高频响方向阀相连接,输入输出模块的X111接口通过电线与插装式电磁换向阀相连接;所述的3号电机驱动模块的X1接口通过电机电缆与3号电机相连接,模拟驱动接口模块的X1接口通过电线与测功机相连接。
与现有技术相比本发明的有益效果是:
1.本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台采用十字滑轨与环形导轨相结合的结构,可以极大的扩大试验角度,可以模拟万向传动装置在实际工作中的不同工况,记录不同工况下万向传动装置的故障数据,以评价该万向传动装置的可靠性水平。
2.本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台采用测功机进行动态扭矩的加载,可实现模拟工作台自动控制动态扭矩加载。
3.本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台具有自动控制系统,可以在程序控制下自动记录精度数据,同时在出现精度失效或故障时自动记录失效数据。
4.本发明所述的一种多转角变扭矩动态万向传动装置可靠性试验台可以试用于不同万向传动装置,安装方便可行,体现了本试验台的灵活性和通用性,具有良好的应用前景。
附图说明
下面结合附图对本发明作进一步的说明:
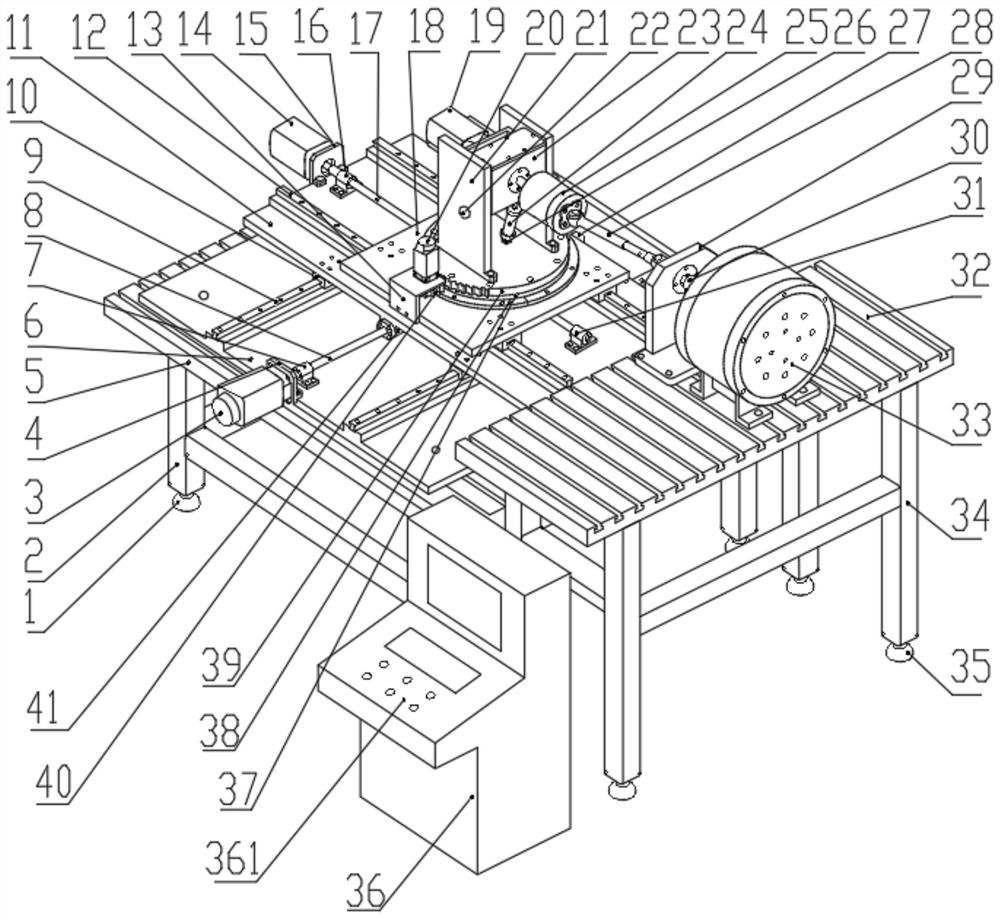
图1为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台结构组成的轴测投影视图;
图2为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的俯仰箱结构组成主视图上的剖视图;
图3为本发明所述的一种多角度变扭矩动态方向传动装置可靠性试验台中所采用的法兰轴支座的轴测投影视图;
图4-1为本发明所述的一种多角度变扭矩动态方向传动装置可靠性试验台中所采用的3号电机支座的主视图;
图4-2为本发明所述的一种多角度变扭矩动态方向传动装置可靠性试验台中所采用的3号电机支座的左视图;
图4-3为本发明所述的一种多角度变扭矩动态方向传动装置可靠性试验台中所采用的3号电机支座的俯视图;
图4-4为本发明所述的一种多角度变扭矩动态方向传动装置可靠性试验台中所采用的3号电机支座的轴测投影视图;
图5为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的环形滑轨结构组成分解式轴测投影视图;
图6为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的环形滑轨结构组成主视图上的剖视图;
图7为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的被测的万向传动装置结构组成的轴测投影视图;
图8为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的纵向滚珠丝杠副结构组成的轴测投影视图;
图9为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的旋转俯仰工作台结构组成的轴测投影视图;
图10为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的俯仰支座结构组成的主视图;
图11为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的法兰轴与1号联轴器装配体的轴测投影视图;
图12为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的横向滚珠丝杠副结构组成的轴侧投影视图;
图13为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的伺服油路结构组成分解式轴测投影视图;
图14为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的监测控制系统的结构组成框图;
图15为本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台中所采用的试验方法的流程框图;
图中:1.1号地脚座,2.1号试验台框架,3.1号电机,4.1号电机支座,5.1号试验台,6.纵向平台,7.纵向滚珠丝杠副前座,8.纵向滚珠丝杠副,81.纵向丝杠,82.纵向丝母,9.纵向导轨副,10.纵向滑块,11横向平台,12.横向导轨副,13.4号电机支座,14.2号电机,15.2号电机支座,16.横向滚珠丝杠副前座,17.横向滚珠丝杠副,18.旋转俯仰工作台,181.横向丝母座,19.3号电机,20.4号电机,21.俯仰支座,211.1号俯仰轴通孔,22.俯仰轴,23.俯仰箱,231.俯仰箱体,232.俯仰箱盖,233.2号俯仰支座,234.2号双耳油缸支座,24.双耳油缸,25.扭矩传感器,26.1号双耳油缸支座,27.纵向滚珠丝杠副后座,28.万向传动装置,281.1号法兰盘,282.1号十字轴式万向节,283.伸缩套,284.滑动花键轴,285.2号十字轴式万向节,286.2号法兰盘,29.法兰轴支座,30.1号联轴器,31.横向滚珠丝杠副后座,32.2号试验台,33.测功机,34.2号试验台框架,35.2号地脚座,36.操作台,361.操作面板,鼠标3621,键盘3622,37.环形滑块,38.环形导轨,381.1号环形导轨,382.2号环形导轨,39.旋转工作台,40.直齿圆柱齿轮,41.纵向丝母座,42.2号联轴器,43.3号电机支座,44.1号轴承盖,45.1号轴承,46.2号轴承,47.主轴,48.法兰盘,49.2号轴承盖,50.纵向联轴器,51.法兰轴,52.横向联轴器,53.高频响方向阀,54.插装式电磁换向阀,55.伺服油路块,56.管接头,57.双耳油缸磁致收缩位移传感器,58.840Dsl系统,59.供电电源,60.输入输出模块,61.1号电机内置编码器,62.1号电机驱动模块,63.2号电机内置编码器,64.2号电机驱动模块,65.3号电机内置编码器,66.3号电机驱动模块,67.4号电机内置编码器,68.4号电机驱动模块,69.调节型电源模块,70.数控单元,71.模拟驱动接口模块,72.计数器,A1.第一工作进油口,A2.第二工作进油口,A3.第三工作进油口,B1.第一工作回油口,B2.第二工作回油口,B3.第三工作回油口,P1.第二进油口,P2.进油口,P3.第三进油口,T1.第二回油口,T2.回油口,T3.第三回油口。
具体实施方式
下面结合附图对本发明作详细的描述:
本发明是模拟万向传动装置在实际运行中的不同工况,受到不同负载的情况下,得到万向传动装置的可靠性数据,而提出一种多角度变扭矩动态万向传动装置可靠性试验台及试验方法。
本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验台及试验方法由两大部分组成,即一种多角度变扭矩动态万向传动装置可靠性试验台和一种多角度变扭矩动态万向传动装置可靠性试验方法。
一种多角度变扭矩动态万向传动装置可靠性试验台
参阅图1,本发明所述的多角度变扭矩动态万向传动装置可靠性试验台包括支承系统、进给系统、旋转俯仰系统、加载系统与监测控制系统。
1.支承系统
参阅图1,所述的支承系统包括4个结构相同的1号地脚座1,1号试验台框架2,1号试验台5,2号试验台32,2号试验台框架34,4个结构相同的2号地脚座35。
所述的1号地脚座1由1号螺杆、半球形的1号底座和2个结构相同的1号锁固螺母组成;
所述的半球形的1号底座为顶端设置成平面且为中空的结构件,顶端的平面与半球形的1号底座的底端底面平行,在半球形的1号底座顶端平面的中心处设置有与1号螺杆的螺纹相配合的螺纹通孔;
所述的1号螺杆中部设有六边形凸台,六边形凸台的两边的螺杆设置有方向相反的与1号锁固螺母相配合的螺纹;
半球形的1号底座通过顶端平面上的螺纹孔与1号螺杆螺的一端纹连接且由1个1号锁固螺母锁固,1号地脚座1通过1号螺杆的另一端与1号试验台框架2的支撑腿的底端螺纹连接,由另一个1号锁固螺母锁固,1号螺杆的回转中心线与1号试验台框架2的1号支撑腿的竖直对称线共线,通过扳手转动1号螺杆上的六边形凸台来调节1号试验台5的水平位置。
所述的1号试验台框架2为长方体形的由空心方钢管焊接而成的框架式结构件,在其四条支撑腿底端面的中心位置处设置有与1号螺杆相配合的螺纹通孔,四条支撑腿顶端面的中心位置设置螺纹通孔,4个螺纹通孔与1号试验台5四个边角处的通孔相对正,四条支撑腿和1号试验台5四个边角处采用螺栓固定连接,1号试验台框架2起支撑作用;
所述的1号试验台5为矩形板式的采用型号为HT250的灰口铸铁制成的试验工作台,在1号试验台5上沿横向设置有相互平行等距的T型槽,在1号试验台5的四个边角处设置有结构相同的沉头孔,四个边角处的沉头孔与1号试验台框架2的四条支撑腿顶端的螺纹通孔相对正,1号试验台5采用螺栓固定连接1号试验台框架2的顶端;
所述的2号试验台32与1号试验台5同为为矩形板式的采用型号为HT250的灰口铸铁制成的试验工作台,在2号试验台32上沿横向设置有相互平行等距的T型槽,在2号试验台32的四个边角处设置有结构相同的沉头孔,四个边角处的沉头孔与2号试验台框架34的四条支撑腿顶端的螺纹通孔相对正,2号试验台32采用螺栓固定连接在2号试验台框架34的顶端;
所述的2号试验台框架34与1号试验台框架2同为长方体形的由空心方钢管焊接而成的框架式结构件,2号试验台框架34的高度大于1号试验台框架2的高度,以保持1号试验台框架34与一号试验台框架2的高度差满足测功机33的输出轴轴线与水平位置的3号电机19输出轴轴线共线,2号试验台框架34起支撑作用;
所述的2号地脚座35与1号地脚座1的结构相同,2号地脚座35由2号锁固螺母、2号螺杆、半球形的2号底座组成,通过扳手转动2号螺杆中部的六边形凸台来调节2号试验台32水平位置;
1号试验台框架2与2号试验台框架34并排放置在地基上,1号试验台框架2与2号试验台框架34的纵向对称面相平行;所述的1号试验台5采用螺栓固定连接在1号试验台框架2的顶端,2号试验台32采用螺栓固定连接在2号试验台框架34的顶端,1号试验台5与2号试验台32处于不同的水平面内;4个结构相同的1号地脚座1通过其中的1号螺杆和1号试验台框架2中的4个结构相同的支撑腿底端的螺纹孔螺纹连接,4个结构相同的2号地脚座35通过其中的2号螺杆与2号试验台框架34中的4个结构相同的支撑腿底端的螺纹孔螺纹连接。
2.进给系统
参阅图1、图8、图9与图12,所述的进给系统由纵向进给系统与横向进给系统组成;
所述的纵向进给系统包括1号电机3、1号电机支座4、纵向平台6、纵向滚珠丝杠副前座7、纵向滚珠丝杠副8、纵向导轨副9、4个结构相同的纵向滑块10、纵向滚珠丝杠副后座27与纵向联轴器50;
所述的1号电机3采用雷塞牌HSM抱闸型伺服电机,1号电机3起到为纵向滚珠丝杠副8提供纵向进给动力及固定横向平台11的相对位置的作用;
所述的1号电机支座4为L型板类结构件,由支撑壁与底座组成,支撑壁的底端与底座的一端垂直连接成一体;
支撑壁的中间位置设置一个与1号电机3输出轴配合的通孔,在通孔的周围均匀地设置4个结构相同的螺纹孔,4个结构相同的螺纹孔与1号电机3上的用于固定的四个通孔相对正,1号电机3采用螺栓固定连接在1号电机支座4的支撑壁上;
1号电机支座4的底座上对称地设置2个结构相同的通孔,2个结构相同的通孔与纵向平台6上的螺纹孔相对正,1号电机支座4通过底座并采用螺栓固定连接在纵向平台6上,1号电机支座4起到固定1号电机3与纵向平台6相对位置的作用;
所述的纵向平台6为一长方形板状结构件,四角处设置有用于安装T型螺栓的通孔,纵向平台6采用T型螺栓固定连接在1号试验台5上;沿纵向平台6的纵向中心线对称均匀地设置两排用于安装纵向导轨副9的螺纹孔,在纵向平台6的纵向中心线两端设置3组螺纹孔,其中前端设置两组螺纹孔,前端外侧的一组设置2个结构相同的与1号电机支座4的底座上的2个通孔对正的螺纹孔,内侧一组设置4个结构相同的用于安装纵向滚珠丝杠副前座7的螺纹孔,后端设置一组包含4个结构相同的用于安装纵向滚珠丝杠副后座27的螺纹孔。
所述的纵向滚珠丝杠副前座7由座体与角接触球轴承组成,座体由矩形板类支座和圆环体形的轴承座组成,支座上表面和圆环体形的轴承座底端对称地连成一体,圆环体形的轴承座回转中心与矩形板类支座纵向对称面相垂直;支座的两端均匀对称地设置4个结构相同的与纵向平台6前端内侧的4个螺纹孔对正的通孔,角接触球轴承安装在座体上的圆环体形的轴承座内孔中,角接触球轴承的外圈与座体上的圆环体形的轴承座内孔过渡配合,角接触球轴承的内圈与纵向滚珠丝杠副8中的纵向丝杠81过渡配合,纵向滚珠丝杠副前座7采用螺栓固定在纵向平台6上,起到支承纵向滚珠丝杠副8的作用;
所述的纵向滚珠丝杠副8由纵向丝杠81、纵向丝母82与纵向丝母座41组成;
纵向丝母82为空心圆柱形状结构件,纵向丝母82的一端设置有法兰盘,法兰盘上沿圆周均匀地设置6个结构相同的螺栓孔,6个结构相同的螺栓孔与纵向丝母座上螺纹孔相对正,两者采用螺栓固定连接,纵向丝母82套接在纵向丝杠81上,纵向丝母82采用螺栓固定在纵向丝母座41上;
纵向丝杠81两端设置为光轴,纵向丝杠81一端的光轴与纵向滚珠丝杠副前座7上的角接触球轴承过渡配合,另一端的光轴与纵向滚珠丝杠副后座27上的角接触球轴承过渡配合;
所述的纵向导轨副9包括有两条结构相同的纵向滑动导轨,两条纵向滑动导轨平行布置,采用螺栓固定在纵向平台6上;
所述的纵向滑块10采用型号为MGN7C的标准滑块,纵向滑块10的横截面为C型,顶端均匀地设置有4个结构相同的螺纹孔;
所述的纵向滚珠丝杠副后座27与纵向滚珠丝杠副前座7结构相同,纵向滚珠丝杠副后座27采用螺栓与纵向滚珠丝杠副前座7相对称地固定在纵向平台6上,纵向滚珠丝杠副后座27与纵向滚珠丝杠副前座7共同起到支承纵向滚珠丝杠副8的作用;
所述的纵向联轴器50采用LZ型弹性柱销齿式联轴器,纵向联轴器50的一端采用键与纵向滚珠丝杠副8中的纵向丝杠81的一端连接,纵向联轴器50的另一端与1号电机3的输出轴键连接;
所述的横向进给系统包括横向平台11、横向导轨副12、2号电机14、2号电机支座15,横向滚珠丝杠副前座16、横向滚珠丝杠副17、横向滚珠丝杠副后座31、4个结构相同的横向滑块与横向联轴器52;
所述的横向平台11为一长方形板状结构件,在横向平台11上沿横向中心线的两侧对称地设置4组结构相同的通孔,每组设置4个结构相同的通孔,每组4个结构相同的通孔分别与4个横向滑块顶端上的螺纹孔相对正,横向平台11与4个横向滑块采用螺栓固定连接,在横向平台11的纵向对称中心线的两端侧均匀对称地设置两排用于安装横向导轨副12的螺纹孔,在横向平台11纵向对称线的两端设置3组螺纹孔,其中左端设置两组,左端外侧一组设置有2个结构相同的螺纹孔,2个结构相同的螺纹孔与2号电机支座15上的用于安装的2个结构相同的通孔相对正,2号电机支座15与横向平台11采用螺栓固定连接,左端内侧一组设置有4个结构相同的螺纹孔,4个结构相同的螺纹孔与横向滚珠丝杠副前座16上的用于安装的4个结构相同的通孔相对正,横向滚珠丝杠副前座16与横向平台11采用螺钉固定连接,横向平台11纵向对称线的右端设置一组包含4个结构相同的螺纹孔,横向平台11通过4个结构相同的螺纹孔与横向滚珠丝杠副后座31通过用于安装的4个结构相同的通孔采用螺栓固定连接。
所述的横向导轨副12包括有两条结构相同的型号为MGN7的直线导轨;横向导轨副12采用螺栓固定在横向平台11的上表面上;
所述的2号电机14与1号电机3同采用雷塞牌HSM抱闸型伺服电机,2号电机14采用螺栓固定在2号电机支座15上,2号电机输出轴与联轴器52的一端连接,联轴器52的另一端与横向滚珠丝杠副17中的横向丝杠的一端连接,2号电机14为横向滚珠丝杠副17提供横向进给动力及固定旋转俯仰工作台18的相对位置;
所述的2号电机支座15为与1号电机支座4结构相同的L型板类结构件,2号电机支座15采用螺栓安装固定在横向平台11一端的中间处,2号电机支座15起到固定2号电机14的作用;
所述的横向滚珠丝杠副前座16与纵向滚珠丝杠副前座7结构相同,横向滚珠丝杠副前座16上安装有角接触球轴承,横向滚珠丝杠副前座16采用螺栓固定在横向平台11上,横向滚珠丝杠副前座16位于2号电机支座15的里侧,横向滚珠丝杠副前座16起到支承滚珠丝杠副17的作用;
所述的横向滚珠丝杠副17与纵向滚珠丝杠副8结构相同,由横向丝杠、横向丝母与横向丝母座181组成,横向丝母与横向丝杠套装在一起,横向丝母通过螺栓固定在横向丝母座181上,横向丝杠两端设置为光轴,一端的光轴装入横向滚珠丝杠副前座16上的角接触球轴承中,横向丝杠另一端的光轴装入横向滚珠丝杠副后座31上的角接触球轴承中;
所述的横向滚珠丝杠副后座31与纵向滚珠丝杠副前座7结构相同,横向滚珠丝杠副后座31采用螺栓与横向滚珠丝杠副前座16相对称地固定在横向平台11上,横向滚珠丝杠副后座31与横向滚珠丝杠副前座16共同起到支承横向滚珠丝杠副17的作用;
所述的横向联轴器52与纵向联轴器50结构相同,皆采用LZ弹性柱销齿式联轴器;横向联轴器52的一端采用键连接与横向滚珠丝杠副17中的横向丝杠的一端连接,横向联轴器52的另一端与2号电机14的输出轴键连接;
所述的横向滑块与纵向滑块10结构相同,皆采用型号为MGN7C的标准滑块;
4个结构相同的横向滑块采用螺栓固定在旋转俯仰工作台18底端面上的螺栓孔处,4个结构相同的横向滑块的下端与横向导轨副12中的两条结构相同的型号为MGN7的直线导轨套装,4个结构相同的横向滑块与两条结构相同的直线导轨之间为滑动连接。
所述的纵向进给系统通过其中的纵向平台6固定安装在支承系统中的1号试验台5上,横向进给系统通过其中的横向平台11安装在纵向进给系统中的套装在纵向导轨副9上的4个结构相同的纵向滑块10的顶端面上。
所述的纵向平台6采用T形螺栓固定在1号试验台5上,1号电机支座4采用螺栓固定连接在纵向平台6一侧的中间处;1号电机3采用螺栓固定安装在1号电机支座4上,1号电机3输出轴与纵向联轴器50的一端键联接,纵向联轴器50的另一端与纵向丝杠81的一端键联接,纵向滚珠丝杠副前座7采用螺栓固定安装在纵向平台6上,纵向滚珠丝杠副前座7位于1号电机支座4的里侧,纵向滚珠丝杠副8中的纵向丝杠81的一端光轴与纵向滚珠丝杠副前座7上的角接触球轴承内环过渡配合,纵向丝杠81的另一端的光轴与纵向滚珠丝杠副后座27上的角接触球轴承内环过渡配合,纵向滚珠丝杠副后座27采用螺栓联接固定在纵向平台6另一侧的上端面上,纵向丝杠81的回转轴线与1号电机3输出轴的回转轴线共线,纵向丝母82套装在纵向丝杠81上,两者之间为转动连接,纵向丝母82采用螺栓固定安装在纵向丝母座41上;纵向导轨副9采用螺栓固定安装在纵向平台6上,纵向导轨副9中两条结构相同的纵向导轨平行对称地位于纵向丝杠81的两侧;4个结构相同的纵向滑块10采用螺栓固定安装在横向平台11底端面的四角处的螺栓孔处,4个结构相同的纵向滑块10的下端与纵向导轨副9套装,两者之间为滑动联接。
2号电机14采用螺栓固定安装在2号电机支座15上,2号电机支座15采用螺栓固定安装在横向平台11一侧的中间处,2号电机14的输出轴与横向联轴器52的一端连接,横向联轴器52的另一端与横向丝杠的一端键连接,横向滚珠丝杠副前座16采用螺栓固定在横向平台11一侧的上端面上,横向滚珠丝杠副前座16位于2号电机支座15的里侧;横向滚珠丝杠副17中的横向丝杠一端的光轴与横向滚珠丝杠副前座16上的角接触球轴承内环过渡配合,横向丝杠另一端的光轴与横向滚珠丝杠副后座31上的角接触球轴承内环过渡配合,横向滚珠丝杠副后座31采用螺栓固定在横向平台11另一侧的上端面上,横向丝杠的回转轴线与2号电机14输出轴的回转轴线共线,横向丝母套装在横向丝杠上,两者之间为转动连接,横向丝母采用螺栓固定安装在横向丝母座181上;横向导轨副12采用螺栓固定安装在横向平台11上,横向导轨副12中两条结构相同的横向导轨平行对称地位于横向丝杠的两侧;4个结构相同的横向滑块采用螺栓固定安装在旋转俯仰工作台18底端面的四角处的螺栓孔处,4个结构相同的横向滑块的下端与横向导轨副12套装,两者之间为滑动联接。
3.旋转俯仰系统
参阅图1、图2、图3、图5、图6、图9与图10,所述的旋转俯仰系统包括4号电机支座13、旋转俯仰工作台18、4号电机20、2个结构相同的俯仰支座21、2个结构相同的俯仰轴22、俯仰箱23、双耳油缸24、1号液压支座26、环形滑块37、环形导轨38、旋转工作台39、直齿圆柱齿轮40与伺服油路。
所述的4号电机支座13为L型板类结构件,由支撑壁与底座组成,支撑壁的底端与底座的一端垂直连接成一体;支撑壁中间位置设置一通孔与4号电机输出轴配合,沿通孔圆周均匀设置4个螺纹孔与4号电机上固定用的四个通孔配合并通过螺钉固定联接,4号电机支座13的底座上对称布置2通孔,底座上的2通孔与旋转俯仰工作台18一侧边的2个结构相同的螺纹孔相对正,4号电机支座13采用螺栓固定安装在旋转俯仰工作台18一侧边的端面上,4号电机支座13起到固定4号电机20的作用;
所述的旋转俯仰工作台18为一正方形板状结构件,在旋转俯仰工作台18的中心处按圆周均匀设置有8个通孔,旋转俯仰工作台18中心处的8个通孔与环形导轨38上的通孔对正,两者采用螺栓相连接;旋转俯仰工作台18四角处分别设置1组的通孔,每组包含4个通孔,每一组通孔的中心连线为正方形,相邻两组通孔间为对称布置,每一组通孔与横向滑块上的4个结构相同的螺纹孔相对正,旋转俯仰工作台18通过4组通孔并采用螺栓和4个结构相同的横向滑块相连接;在旋转俯仰工作台18一侧中心处的底面上设置横向丝母座181,横向丝母座181为圆环体形结构件,横向丝母座181的长度与横向丝母的长度一致,在外侧端面上沿圆周方向均匀地设置6个结构相同的螺纹孔,6个结构相同的螺纹孔与横向丝母法兰盘上的通孔相对正,横向丝母装入横向丝母座181内并采用螺栓固定联接;在旋转俯仰工作台18一侧边的端面上设置2个为一组的螺纹孔,该2个螺纹孔与4号电机支座13中底座上的2个通孔相对正,4号电机支座13采用螺栓固定联接在旋转俯仰工作台18上;
所述的4号电机20与1号电机3同采用雷塞牌HSM抱闸型伺服电机,4号电机20采用螺栓固定在4号电机支座13上,起到提供旋转工作台39圆周运动的动力并固定旋转工作台39相对位置的作用;
所述的俯仰支座21为板状结构件,其底部的两端对称地设置有2个凸台,每个凸台上设置有用于安装螺栓的通孔,每个凸台上的通孔与旋转工作台39上螺纹孔配合对正,俯仰支座21中部设置有1号俯仰轴通孔211,俯仰轴通孔211的位置确保俯仰箱23在水平位置时俯仰箱23右端面与俯仰支座21的右端面重合,箱体盖232顶端面与俯仰支座21的顶端面重合,2个结构相同的俯仰支座21采用螺栓平行对正地固定在旋转工作台39上,2个结构相同的俯仰支座21共同起到支承俯仰箱23的作用;
所述的俯仰轴22为一光轴结构件,光轴一端设置有六边形凸台,另一端设置有螺纹;俯仰轴22与俯仰支座21上的1号俯仰轴通孔211配装,再采用螺母锁固。
所述的俯仰箱23由俯仰箱体231与俯仰箱盖232组成。
所述的俯仰箱盖232为长方形板类结构件,俯仰箱盖232的周边均匀地设置有安装螺栓的通孔,俯仰箱盖232上的安装螺栓的通孔与俯仰箱体231箱壁顶端的螺纹盲孔相对正,俯仰箱盖232采用螺栓固定在俯仰箱体231的顶端。
所述的俯仰箱体231为长方体形的空心箱体结构件,顶端为敞开式,底端为封闭式,俯仰箱体231的顶端沿箱壁方向在四周的箱壁上均匀地设置有螺纹盲孔,俯仰箱体231顶端上的螺纹盲孔和俯仰箱盖232的周边设置的通孔相对正;俯仰箱体231左、右箱壁的中心处沿水平方向设置有采用1号轴承45与2号轴承46安装主轴47的结构相同的回转轴线共线的1号通孔与2号通孔;俯仰箱体231的箱底面上设置有2号俯仰支座233与2号双耳油缸支座234,2号俯仰支座233的纵向长度与俯仰箱体231纵向长度相同,为U型结构,设置与其半圆边缘同轴心的通孔;2号双耳油缸支座234纵向对称面与俯仰箱体231横向对称面重合,2号双耳油缸支座234的尺寸与双耳油缸24配合,2号双耳油缸支座234设置与其半圆形边缘同轴心的通孔与双耳油缸24中的活塞杆端轴接,俯仰箱23可绕俯仰轴22作±45°的俯仰旋转运动。
所述的双耳油缸24采用型号40*100的伺服油缸,便于实现自动控制,双耳油缸24的缸体上设置有进出油口A和进出油口B,双耳油缸24尾部为叉形结构,双耳油缸24尾部中心处设有磁致收缩位移传感器安装部,双耳油缸磁致收缩位移传感器尺57用于进行闭环反馈,双耳油缸24尾部与旋转工作台39上的液压支座26轴接,活塞杆端与俯仰箱23上的2号双耳油缸支座234之间采用销轴连接,双耳油缸24为俯仰箱23的俯仰旋转运动提供动力。
所述的液压支座26由支撑臂与底座组成;支撑臂为半圆形板状结构件,半圆形板上设置有一通孔;底座设置为圆形的凸台,圆形的凸台上均匀地设置有安装螺栓的通孔;支撑臂的底端与底座的顶端连成一体;液压支座26采用螺栓安装在旋转工作台39上,液压支座26通过其中的支撑臂与双耳油缸24的尾部采用销轴连接;
所述的环形滑块37为等横截面的圆环形结构件,由矩形截面工作体与L型截面工作体两部分组成,L型截面竖直边与矩形截面内边共线,在长方形截面工作体上端面中间位置沿圆周方向均匀设置8个结构相同的螺纹孔与旋转工作台39上的8个结构相同的通孔对正,L型截面工作体与环形导轨38对应截面配合;环形滑块37采用螺钉固定安装在旋转工作台39的底端面上,环形滑块37与环形导轨38套装,两者之间为滑动连接;
所述的环形导轨38由两个结构相同的等横截面的半圆环形的1号环形导轨381与2号环形导轨382组成,环形导轨38由长方形截面凸台和工作体组成,工作体截面与环形滑块27工作体截面相配合,环形导轨38在凸台沿圆周方向均匀地设置8个结构相同的沉头孔,8个结构相同的沉头孔与旋转俯仰工作台18上的8个结构相同的通孔对正,环形导轨38采用螺钉与旋转俯仰工作台18上表面固定联接,环形导轨38与环形滑块37套装,两者之间为滑动连接;
所述的旋转工作台39为圆盘形结构件,在旋转工作台39的90度范围内的圆周端面上设置有与直齿圆柱齿轮40模数相同的轮齿,在旋转工作台39圆周方向均匀地设置8个结构相同的沉头孔,8个结构相同的沉头孔与环形滑块37上的8个结构相同的螺纹孔相对正,旋转工作台39与环形滑块37采用螺栓固定联接,在旋转工作台39上对称布置4个结构相同的用于安装俯仰支座21的螺纹孔,旋转工作台39在4号电机20的驱动下可绕环形导轨38的旋转轴线作±45°的旋转运动;
所述的直齿圆柱齿轮40与4号电机20的输出轴连接,直齿圆柱齿轮40与旋转工作台39上的轮齿啮合连接;
所述的伺服油路中装设有高频响方向阀53、2个结构相同的插装式电磁换向阀54、伺服油路块55、4个结构相同的管接头56,伺服油路起到控制双耳油缸24的作用;
所述的高频响方向阀53采用德国Rexroth品牌的型号为4WRTE的三位四通高频响方向阀;
伺服油路块55前端面的上部设有第一工作进油口A1和第一工作回油口B1;伺服油路块55前端面的下部设有第二进油口P1和第二回油口T1;
伺服油路块55的顶端面的前侧设置有插装式电磁换向阀54的工作进油口A2和工作回油口B2;伺服油路块55的顶端面的后侧设置有高频响方向阀53的进油口P2、回油口T2、工作进油口A3和工作回油口B3;伺服油路块55的后端面设有液压源的第三进油口P3和第三回油口T3;
伺服油路块55的第三进油口P3和第三回油口T3分别与进油口P2、回油口T2相连通,工作进油口A3和工作回油口B3分别与工作进油口A2和工作回油口B2相连通,同时工作进油口A2和工作回油口B2分别与第一工作进油口A1和第一工作回油口B1相连通;第一工作进油口A1和第一工作回油口B1分别与第二进油口P1和第二回油口T1相连通,第二进油口P1和第二回油口T1相连通分别与双耳油缸24中的缸体上的进出油口A和进出油口B相连接;
所述的管接头56为符合国家标准JB/T966-2005的焊接式管接头;管接头56设置有4个,其中2个相同的管接头56安装在伺服油路块55前端面的第二进油口P1和第二回油口T1上;另2个管接头56安装在伺服油路块55后端面第三进油口P3和第三回油口T3;
所述的伺服油路块55固定在旋转工作台39上。
所述的旋转俯仰系统通过旋转俯仰工作台18安装在进给系统的横向进给系统中的4个结构相同的横向滑块的顶端上。
所述的旋转俯仰工作台18安装在进给系统的横向进给系统中的4个结构相同的横向滑块的顶端上,环形导轨38采用螺栓固定安装旋转俯仰工作台18上表面的中心处;旋转工作台39通过环形滑块37安装在环形导轨38上,即环形滑块37采用螺栓固定在旋转工作台39的底端面上,然后环形滑块37安装在环形导轨38上,环形导轨38与环形滑块37之间为套装滑动连接;2个结构相同的俯仰支座21采用螺栓平行对正地固定安装在旋转工作台39的上端面上,俯仰轴22的两端安装在2个俯仰支座21上的1号俯仰轴通孔211内,两者之间为转动连接,俯仰箱23通过其上的2号俯仰支座233套装在俯仰轴22上,两者之间为转动连接;
4号电机支座13通过其中的安装底座并采用螺栓固定在旋转俯仰工作台18一侧边的端面上,4号电机支座13中的支撑壁与旋转俯仰工作台18相平行,4号电机20采用螺栓固定安装在4号电机支座13的支撑壁上,4号电机输出轴与4号电机支座13的支撑壁相垂直,4号电机输出轴的回转轴线与旋转工作台39的回转中心线相平行,直齿圆柱齿轮40套装在4号电机20的输出轴上,两者之间采用键连接,直齿圆柱齿轮40与旋转工作台39周边上的轮齿啮合连接;
液压支座26安装在旋转工作台39的上端面上,双耳油缸24的缸体尾端与旋转工作台39上的液压支座26之间采用销轴连接,双耳油缸24的活塞杆伸出端与俯仰箱23上的2号双耳油缸支座234采用销轴连接;伺服油路通过其中的伺服油路块55固定安装在旋转工作台39的上端面上,伺服油路块55上的第二进油口P1和第二回油口T1分别和双耳油缸24的缸体上的进出油口A与进出油口B管道连接。
4.加载系统
参阅图1、图2、图3、图4与图8,所述的加载系统包括3号电机19、法兰轴支座29、1号联轴器30、测功机33、2号联轴器42、3号电机支座43、1号轴承盖44、1号轴承45、2号轴承46、主轴47、法兰盘48、2号轴承盖49与法兰轴51。
所述的3号电机19采用雷品牌型号为iss57一体式数字式混合伺服电机,3号电机19采用螺栓固定连接在电机支座43上,3号电机19通过2号联轴器42与主轴47一端连接,3号电机19起到为万向传动装置28提供动力的作用;
所述的法兰轴支座29由安装底板,支撑壁与深沟球轴承组成,支撑壁的宽度小于安装底板长边的长度,支撑壁的底端与安装底板一长边的中间处垂直连接,安装底板在四个边角对称布置4个通孔,支撑壁的上端设置一通孔,深沟球轴承安装在支撑壁上的通孔内,深沟球轴承外圈与通孔过渡配合,法兰轴支座29采用螺栓固定在2号试验台32一侧的长边处,法兰轴51安装在深沟球轴承的内环中,法兰轴支座29起到支承法兰轴51的作用;
所述的1号联轴器30采用LZ弹性柱销齿式联轴器,联轴器30的一(左)端通过键与法兰轴51的键槽端连接,另一(右)端与测功机33的输出轴连接;
所述的测功机33采用DW-10涡流测功机,内置高速PID控制卡,起到加载扭矩的作用;
所述的2号联轴器42与1号联轴器30结构相同,均采用LZ弹性柱销齿式联轴器,2号联轴器42的一(右)端通过键与主轴47连接,2号联轴器42的另一端(左)与3号电机19的输出轴连接;
参阅图2与图4-1至图4-4,所述的3号电机支座43为几字形板类结构件,由左支撑壁、右支撑壁与固定壁组成,左支撑壁、右支撑壁与固定壁皆为矩形板类结构件,左支撑壁与右支撑壁结构相同,固定壁宽度和左支撑壁、右支撑壁的宽度相等,在固定壁的中心处设置一个用于安装3号电机输出轴的中心通孔,在中心通孔的周围并沿圆周方向均匀地设置有4个结构相同的用于固定3号电机19的螺纹孔,在左支撑壁、右支撑壁底端前后两侧设置有4个结构相同的矩形的凸台,4个结构相同的矩形的凸台上对称设置4个结构相同的通孔;支撑壁、右支撑壁的顶端和固定壁的两端垂直连接;3号电机支座43通过4个结构相同的矩形的凸台固定在俯仰箱体231上,3号电机支座43起到固定3号电机19与俯仰箱23相对位置的作用;
所述的1号轴承45与2号轴承46采用相同的NU型圆柱滚子轴承;
所述的主轴47为一阶梯轴,一端设置键槽与二号联轴器42通过键连接固定相对位置,另一端设置螺纹与法兰盘48通过螺纹连接固定相对位置,轴身分别与1号轴承45和2号轴承46的内环过渡配合;
主轴47通过1号轴承45、2号轴承46安装在俯仰箱23上,即1号轴承45与2号轴承46的外圈与俯仰箱23过渡配合;
所述的法兰盘48为矩形的板类结构件,在其回转中心线处设置有与主轴47的螺纹端配合连接的沉头孔,采用螺母将法兰盘48固定连接在主轴47的螺纹端,在法兰盘48的四角处均匀对称地设置4个结构相同的通孔,法兰盘48上的4个结构相同的通孔与扭矩传感器25上螺纹孔相对正,采用螺栓将两者固定连接;
所述的法兰轴51由一根光轴与一个正方形的法兰盘组成,光轴一端设置一个键槽;法兰盘的四角处对称地设置4个结构相同的通孔,法兰盘上的4个结构相同的通孔与被试的万向传动装置28中的2号法兰盘286上的通孔对正;光轴未设置键槽的一端与法兰盘的一侧端面垂直固定连接,光轴的回转轴线与法兰盘的对称轴线共线;法兰轴51的法兰盘端采用螺栓与万向传动装置28中的2号法兰盘286固定连接,法兰轴51的光轴端与1号联轴器30一端采用键连接固定;
所述的1号轴承盖44与2号轴承盖49皆为结构相同的圆盘形结构件,沿其圆周均匀地设置8个结构相同的并与俯仰箱23上的螺纹孔相对正的通孔,1号轴承盖44与2号轴承盖49采用螺栓和俯仰箱23两侧箱壁固定连接,起到固定1号轴承45与2号轴承46的作用;
所述的3号电机19采用螺栓与3号电机支座43左端固定连接,3号电机19输出轴与2号联轴器42一端键联接,2号联轴器42另一端与主轴47的设置有键槽的一端键连接;3号电机支座43采用螺栓固定安装在俯仰箱23的左箱壁上;主轴47的轴身分别与1号轴承45与2号轴承46的内圈过渡配合,1号轴承45与2号轴承46外圈分别与俯仰箱23的两主轴通孔过渡配合;俯仰箱23箱底上的2号俯仰支座233上通孔与俯仰轴22套装连接;1号轴承盖44与2号轴承盖49分别采用螺栓与俯仰箱23的左右箱壁的外侧壁固定连接;法兰盘48与主轴47螺纹端套装连接,并采用螺母固定,法兰盘48与扭矩传感器25的一端通过螺栓固定连接,扭矩传感器25另一端通过螺栓与被试的万向传动装置28中的1号法兰盘281固定连接,被试的万向传动装置28中的2号法兰盘286与法兰轴51的法兰盘端采用螺栓固定连接,法兰轴51的光轴段安装在法兰轴支座29通孔中,法兰轴51设置有键槽的光轴端与联轴器30一端键连接,联轴器30另一端与测功机的输出轴连接;
所述的3号电机19为加载系统提供旋转动力,经过主轴47与扭矩传感器25带动被试的万向传动装置28转动,测功机33调节试验台的整体负载,通过高速PID控制卡可实现按照所需波形加载动态扭矩,加载波形包括正弦波、锯齿波、梯形波、三角波、方波、直线波、随机波等,用以模拟万向传动装置28在启动、停止及运动过程中不同工况下的受载情况;
5.监测控制系统
参阅图1、图2与图10,所述的监测控制系统包括扭矩传感器25、操作台36、测功机内置扭矩传感器,双耳油缸磁致收缩位移传感器57、西门子840Dsl系统58、供电电源59、计数器72与控制模组;
所述的扭矩传感器25采用HCNJ-105扭矩传感器,其电气线连接在输入输出模块60的X3接口上,扭矩传感器25的一端采用螺栓与法兰盘48固定联接,扭矩传感器25的另一端采用螺栓与被试的万向传动装置28中的1号法兰盘281固定连接,起到监测被试的万向传动装置28所受扭矩的作用;
测功机内置扭矩传感器与模拟驱动接口模块71的X1接口电线连接,起到测量测功机33转速与扭矩的作用;
所述的操作台36上设置操作面板361和交互性外设;交互性外设包括鼠标3621和键盘3622,其中操作面板361采用西门子OP 015操作面板,固定在操作台36上端部的前面板上,其电气连接在西门子840Dsl系统58的DPI处,鼠标3621和键盘3622设在操作台36的前面伸出部分的上端面,鼠标3621和键盘3622分别通过数据线接在西门子840Dsl系统58的USB接口处;
所述的西门子840Dsl系统58为监测控制系统的处理中心,安装在操作台36内部;
所述的供电电源59为西门子840Dsl系统58提供DC24V电源,供电电源59通过电线连接在西门子840Dsl系统58的X1接口处,安装在操作台36内部;
所述的控制模组包括输入输出模块60、1号电机内置编码器61、1号电机驱动模块62、2号电机内置编码器63、2号电机驱动模块64、3号电机内置编码器65、3号电机驱动模块66、4号电机内置编码器67、4号电机驱动模块68、调节型电源模块69、数控单元70与模拟驱动接口模块71;
所述的输入输出模块60采用西门子72/48D 2/2A PN输入输出模块;用网线将其X2接口端和数控单元70的X126接口相连接;输入输出模块60的X3接口通过电线与扭矩传感器25及计数器72相连接;输入输出模块60的X111接口通过电线与插装式电磁换向阀54相连接;
所述的1号单电机驱动模块62采用西门子SMM单电机模块,主要用于控制抱闸电机的运行和调速;1号单电机驱动模块62的X200接口通过网线与数控单元70的X100接口相连接;1号单电机驱动模块62的X201接口通过网线与2号单电机驱动模块64的X200接口相连接;1号单电机驱动模块62的X1接口通过电机电缆与1号电机3相连接;1号单电机驱动模块62的X202接口通过信号电缆与1号电机3中的1号电机内置编码器61相连接;
所述的2号单电机驱动模块64采用西门子SMM单电机模块,通过网线将其X200接口与1号单电机驱动模块62的X201接口相连接;2号单电机驱动模块64的X1接口通过电机电缆与2号电机14相连接;2号单电机驱动模块64的X202接口通过信号电缆与2号电机14中的2号电机内置编码器63相连接;2号单电机驱动模块64的X201接口通过网线与3号电机驱动模块66的X200接口相连接;
所述的3号电机驱动模块66采用西门子SMM单电机模块,通过网线将其X200接口与2号电机驱动模块64的X201接口相连接;3号电机驱动模块66的X1接口通过电机电缆与3号电机19相连接;3号电机驱动模块66的X202接口通过信号电缆与3号电机19中的3号电机内置编码器65相连接;3号电机驱动模块66的X203接口通过网线与4号电机驱动模块68的X200接口相连接;
所述的4号电机驱动模块68采用西门子SMM单电机模块,通过网线将其X200接口与3号电机驱动模块66的X203接口相连接;4号电机驱动模块68的X1接口通过电机电缆与4号电机20相连接;4号电机驱动模块68的X202接口通过信号电缆与4号电机20中的4号电机内置编码器67相连接;
所述的调节型电源模块69采用西门子ALM调节型电源模块,调节型电源模块69为电机模块提供动力;用网线将调节型电源模块69的X200接口和数控单元70的X100接口相连接;
所述的数控单元70采用西门子NCU720数控单元,是西门子840Dsl系统58的中央处理器,主要用于处理所有CNC、PLC通讯任务;通过网线将其X120接口与西门子840Dsl系统58的X2接口相联接。数控单元70的X126接口通过网线与输入输出模块60的X2接口相联接;数控单元70的X100接口通过网线与调节型电源模块69的X2000接口连接;
所述的模拟驱动接口模块71采用西门子ADI4模拟驱动模块,通过电线将模拟驱动接口模块71的X1接口与测功机接线端电线连接;通过电线将模拟驱动接口模块71的X2接口与数控单元70的X126接口相连接;模拟驱动接口模块71的X3接口通过电线与高频响方向阀53相连接;模拟驱动接口模块71的X4-1接口通过电线与双耳油缸内置磁致收缩位移传感器57相连接;
控制模组设置在操作台36中。
所述的计数器72采用科德TW-268的计数器,计数器72通过螺栓与法兰轴支座29固定联接,与法兰轴51垂直,计数器72通过电线连接在输入输出模块60的X3接口上,起到检测万向传动装置28工作循环次数的作用;
二.一种多角度变扭矩动态万向传动装置可靠性试验方法
本发明所述的一种多角度变扭矩动态万向传动装置可靠性试验方法是采用前面所述的一种多角度变扭矩动态万向传动装置可靠性试验台的基础上进行的试验方法,针对实测万向传动装置提出一套可靠性试验方法。
参阅图14与图15,一种多角度变扭矩动态万向传动装置可靠性试验方法的步骤如下:
1.可靠性试验准备
1)保持试验环境温度恒定为20摄氏度,多角度变扭矩动态万向传动装置可靠性试验装置在试验环境中放置足够长的时间(大于12小时);
2)在监测控制系统中设置3号电机19提供旋转作用力,设置测功机33加载的动态扭矩,包括扭矩大小、扭矩方向及加载波形,实现模拟万向传动装置28在启动、停止及运动过程中不同工况的动态情况;
3)在监测控制系统中设置旋转俯仰工作台18横向及纵向位置;
4)在监测控制系统中设置旋转工作台39的摆动角度;
5)在监测控制系统中设置俯仰箱23的俯仰角度;
6)在监测控制系统中设置万向传动装置28的精度失效阈值即扭矩阈值;
2.可靠性试验数据的监测和记录
1)启动自动控制程序,可靠性试验开始计时;
2)将扭矩传感器25测量的万向传动装置28实际受到的扭矩、计数器72记录的万向传动装置28工作循环次数、1号电机内置编码器61的数据、2号电机内置编码器63的数据、3号电机内置编码器65、4号电机内置编码器67的数据、双耳油缸磁致收缩位移传感器57的数据实时传输至西门子84Dsl系统58;
3)万向传动装置28出现疲劳破坏即扭矩传感器25检测数据为0时,整个试验结束,监测控制系统根据检测数据自动绘制万向传动装置28的疲劳曲线;当扭矩传感器25检测的扭矩值大于失效阈值时,停止此次可靠性试验;监测控制系统还记录其它故障,例如:元件损坏、监测控制系统报警故障等;若发生故障后,则停止此次可靠性试验,并记录此次试验连续无故障工作时间;
3.可靠性试验数据的分析
1)在可靠性试验完成后,对试验采集的故障数据进行统计分析处理,利用FMECA分析及FTA分析方法分析被测万向传动装置28的可靠性水平;
2)在可靠性试验完成后,对试验采集的疲劳曲线进行分析,能够得出万向传动装置28在不同工作角度、受不同循环特征负载时的极限扭矩;
3)在可靠性试验过程中,如果出现元件损坏、监测控制系统报警等故障时,则应立即停止试验,分析故障产生的原因,并对万向传动装置28多角度变扭矩动态试验台进行改进。
本发明中所述的实施例是为了便于该领域技术人员能够理解和应用本发明,本发明只是一种优化的实例,或者说是一种较佳的具体技术方案。如果相关的技术人员在坚持本发明基本技术方案的情况下,做出不需要经过创造性劳动的等效结构变化或各种修改都在本发明的保护范围内。
- 一种动态万向传动装置可靠性试验台
- 一种万向传动装置拉扭复合可靠性试验台及试验方法