第一车辆侧控制单元和用于运行第一车辆侧控制单元的方法
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及第一车辆侧控制单元和用于运行第一车辆侧控制单元的方法。
发明内容
根据本发明的第一方面,提供了一种用于第一机动车辆的第一车辆侧控制单元,其中所述第一车辆侧控制单元包括至少一个处理器、至少一个具有计算机程序代码的存储器、至少一个通信模块和至少一个天线,其中所述计算机程序代码被配置为其与所述至少一个处理器、所述至少一个通信模块和所述至少一个天线一起使得所述第一车辆侧控制单元接收从特别是直接在所述第一机动车辆前方行驶的第二机动车辆的第二车辆侧控制单元发出的第一控制消息,所述第一控制消息包括至少一个行驶状态信息,根据所述第一控制消息确定用于启动所述第一机动车辆的反应(例如制动,特别是紧急制动)的第一时刻,选择所述第一时刻作为有效时刻,并且如果到所述有效时刻为止都没有成功接收到从所述第二车辆侧控制单元发出的其他控制消息,则确定用于启动所述第一机动车辆的所述反应的信号。
有利地,所述第一控制单元仅使用分别来自前方行驶的机动车辆的信息来确定所述时刻或是否应当启动反应。由此保证只要所述第一机动车辆不再接收到控制消息并且因此也不再发送控制消息,则随后的机动车辆也启动反应。由此确保了,从队列内的出现错误的机动车辆开始,所有随后的机动车辆同样执行所述反应并由此确保所述队列的安全。因此,用于维持和协调该组的控制消息被用于使该组机动车辆保持在安全状态。如果达到了所述有效时刻—也就是如果后续的其他控制消息例如由于无线电传输的干扰或参与的控制单元的干扰而丢失,则例如启动所述第一机动车辆的制动,该制动会导致所述第一机动车辆安全地停止而不与前面的车辆碰撞。当然,也可以将提供的机制用于有意制动,由此一旦可靠地识别出危险状况,就有针对性地中断控制消息流。此外,所提供的机制在技术上易于实现。因此,可以通过安全的方式在该组机动车辆内解决潜在的危险状况,例如在该组机动车辆的前方行驶的车辆前方出现障碍物或通信有干扰。
在另外的行驶状况下,作为对丢失从所述第二机动车辆发出的控制消息的反应,减小发动机功率,从而所述第一机动车辆进行(可能对于紧急情况已经是预先的)根据交通状况规划的规避机动,以避免对应的紧急制动或至少根据所述状况中的必要性通过降低制动功率来对于驾驶员来说更加舒适地停车。
一个有利的示例的特征在于,所述第一车辆侧控制单元时间上在出现所述有效时刻之前接收从直接在所述第一机动车辆前方行驶的第二机动车辆的第二车辆侧控制单元发出的第二控制消息,根据所述第二控制消息确定用于启动所述第一机动车辆的所述反应的第二时刻,其中所述第二时刻在将来比所述有效时刻更远,并且选择所述第二时刻作为有效时刻。有利地,在接收到时间上后续的控制消息时,将所述有效时刻移动到将来更远的地方,由此抑制了所述反应,特别是所述第一机动车辆的制动或所述第一机动车辆的发动机功率的降低。
一个有利的示例的特征在于,所述第一车辆侧控制单元确定安全持续时间,根据所确定的安全持续时间确定相应的时刻,并且根据所述安全持续时间适配所述第一机动车辆和所述第二机动车辆之间的安全距离。因此有利的是,所述时刻与所述安全距离彼此适配,使得例如可以在不发生碰撞的情况下进行紧急制动。有利地,从所确定的安全持续时间中导出两个上述变量,由此一方面带来了对所提供的机制的简化,另一方面提高了机动车辆的运行安全。
一个有利的示例的特征在于,相应的控制消息包括针对所述控制消息的产生时刻的指示,并且其中所述第一控制单元根据所述安全持续时间和根据所述控制消息的相应的产生时刻来确定相应的时刻。有利地,所述第一控制单元从接收到的控制消息的实际产生时刻中导出所述时刻。因此确保了所述安全持续时间从所述产生时刻开始。例如,由此可以选择较短的安全持续时间。
一个有利的示例的特征在于,所述第一控制单元根据相应控制消息的接收时刻来估计相应控制消息的产生时刻,并且根据所述安全持续时间以及根据相应控制消息的估计的产生时刻来确定相应时刻。有利地取消了对所述产生时刻的确定和传输,这节省了在所述第二控制单元方面的资源并且节省了无线电资源。另外,控制单元的时间同步化不是必需的,并且可以取消对应的时间模块。
一个有利的示例的特征在于,所述第一车辆侧控制单元确定从所述第二控制单元接收的控制消息的服务质量QoS,并根据所确定的QoS确定所述安全持续时间。有利地,通过考虑从所述第二控制单元接收的控制消息的服务质量,所述控制单元适配于所使用的无线电信道上的拥塞水平。所述无线电信道的拥塞水平(Congestion Level)的提高例如导致更长的安全持续时间并且因此导致机动车辆之间更大的安全距离。当然,拥塞水平的提高并不是服务品质/服务质量恶化的唯一原因。不利的传播条件或对无线电信道的故意干扰(“Jamming”)也可能导致分组错误率增加。
一个有利的示例的特征在于,所述安全持续时间大于源自所述第二控制单元的控制消息的发送频率和/或接收频率的周期持续时间。由此,即使在未接收到各个控制消息的情况下也不会不必要地触发在所述有效时刻规划的反应。
一个有利的示例的特征在于,所述第一车辆侧控制单元直到出现所述有效时刻为止朝着第三机动车辆的第三车辆侧控制单元的方向发送其他数量的控制消息,每个控制消息包括至少一个行驶状态信息,并且在出现所述有效时刻之后不朝着所述第三车辆侧控制单元的方向发送其他控制消息。有利地,还及时中断到所述第三控制单元的控制消息流,所述控制消息流同样影响其在所述第三机动车辆和所述第一机动车辆之间的安全距离,从而所述第三控制单元同样还可以及时启动诸如紧急制动的反应,以便能够停止所述第三机动车辆而不会与所述第一机动车辆碰撞。
本说明书的另一方面涉及一种机动车辆,其具有根据上述方面之一的第一车辆侧控制单元并且具有制动设施,其中所述第一车辆侧控制单元将用于启动所述第一机动车辆的制动的信号传送到所述制动设施。
本说明书的第三方面涉及一种用于运行用于第一机动车辆的第一车辆侧控制单元的方法,其中所述方法包括:接收从特别是直接在所述第一机动车辆前方行驶的第二机动车辆的第二车辆侧控制单元发出的第一控制消息,所述第一控制消息包括至少一个行驶状态信息,根据所述第一控制消息确定用于启动所述第一机动车辆的反应的第一时刻,选择所述第一时刻作为有效时刻,并且如果直到所述有效时刻为止都没有成功接收到从所述第二车辆侧控制单元发出的其他控制消息,则确定用于启动所述第一机动车辆的所述反应的信号。
附图说明
其他特征和优点可以从下面的描述和附图中得出。在附图中:
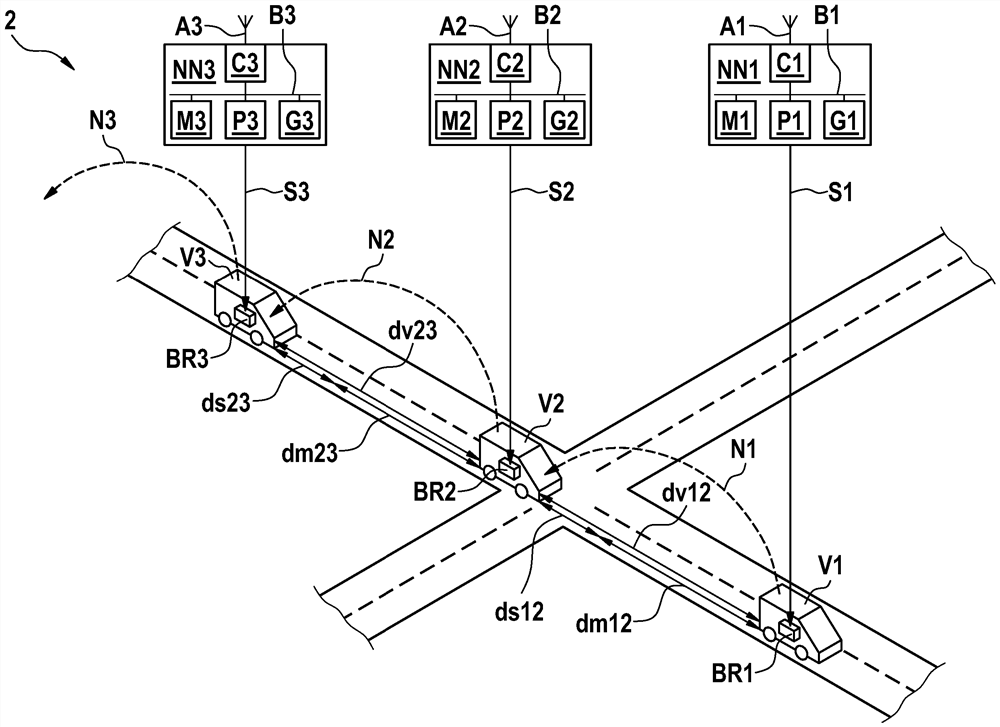
图1以示意性透视图示出了交通状况;
图2示出了示意性流程图;
图3以示意图示出了控制消息;
图4示出了用于运行无线电通信网络的示意性序列图;以及
图5示出了示意框图。
具体实施方式
图1示出了示例性交通状况的示意性透视图。每个机动车辆V1,V2,V3包括车辆侧控制单元NN1,NN2,NN3,这些车辆侧控制单元一起形成无线电通信网络2。相应的机动车辆V1,V2,V3特别是卡车或卡车拖车或铰接式卡车。
每个控制单元NN1,NN2,NN3都包括数据总线B1,B2,B3,该数据总线将至少一个处理器P1,P2,P3、存储器M1,M2,M3和无线电模块C1,C2,C3彼此连接。至少一个天线A1,A2,A3连接到无线电模块C1,C2,C3。相应的无线电模块C1,C2,C3被配置为根据自组织无线电通信网络2经由天线A1,A2,A3发送和接收无线电信号。在存储器M1,M2,M3上存储了计算机程序产品意义上的计算机程序。该计算机程序被构造用于特别是借助于至少一个处理器P1,P2,P3、至少一个存储器M1,M2,M3和至少一个无线电模块C1,C2,C3来执行在本说明书中阐述的方法步骤,并且经由至少一个天线A1,A2,A3与其他控制单元通信。替代地或附加地,处理器P1,P2,P3被实现为ASIC,以执行所描述的方法步骤。相应的控制单元NN1,NN2,NN3包括时间模块G1,G2,G3,借助于该时间模块,相应的控制单元NN1,NN2,NN3将其内部时钟同步到全球时间。时间模块G1,G2,G3例如是GPS模块(GPS:全球定位系统)。与全球时间同步的内部时钟用于协调车辆侧控制单元NN1至NN3的动作。相应的机动车辆V1,V2,V3包括制动设施BR1,BR2,BR3。相应的控制单元NN1,NN2,NN3借助于信号S1,S2,S3启动机动车辆V1,V2,V3的反应,例如制动,特别是紧急制动和/或发动机功率降低,其中将信号S1,S2,S3传送到相应的制动设施BR1,BR2,BR3。
在实施例中,相应的控制单元NN1,NN2,NN3由多个个体组件组成,例如无线电通信网络终端和控制设备,所述个体组件又包括至少一个处理器、存储器、数据总线和至少一个通信接口。所述终端接收并发送例如控制消息,其中在所述控制消息中包含的信息由至少一个控制设备处理,其中所述至少一个控制设备确定信号S1。
无线电通信网络2例如提供无线电资源或无线电运行资源意义上的至少一个自组织无线电信道。每个控制单元NN1,NN2,NN3例如根据IEEE 802.11p标准,特别是2010年7月15日的IEEE 802.11p-2010配置,该标准通过引用结合到本说明书中。IEEE 802.11p PHY功能和MAC功能为美国的专用短程通信DSRC和欧洲的合作ITS、C-ITS的上层协议提供服务。控制单元NN1,NN2,NN3经由非许可频率范围内的自组织无线电信道直接相互通信。通过无线电模块C1,C2,C3借助于CSMA/CA协议(载波侦听多路访问/冲突避免)访问所述自组织无线电信道。所述自组织无线电信道和无线电通信网络2例如由IEEE标准“802.11 p-2010 -IEEE Standard for Information Technology - Local and Metropolitan AreaNetworks-Specific Part 11 : Wireless LAN Medium Access Control (MAC) andPhysical Layer (PHY) Specifications Amendment 6: Wireless Access in VehicularEnvironments”规范,通过引用并入该标准。IEEE 802.11p是用于扩展WLAN标准IEEE802.11的标准。IEEE 802.11p的目标是建立乘用车中的无线电技术并且为智能交通系统(ITS)应用提供可靠的接口。IEEE 802.11p也是5.85至5.925GHz范围内的专用短程通信(DSRC)的基础。替代地,车辆侧控制单元NN1,NN2,NN3形成根据LTE-V标准或其他标准的通信网络。为了访问所述自组织无线电信道,控制单元NN1,NN2和NN3例如应用了先听后讲(Listen-Before-Talk)的方法。LBT包括退避程序,该程序在发送之前检查所述自组织无线电信道的占用情况。
通过引用并入本文的文献“ETSI EN 302 663 V1.2.0(2012-11)”描述了ITS-G5技术的两个最低层(ITS G5:在5GHz频带中工作的智能传输系统),即物理层和数据安全层。为了使用所述自组织无线电信道,无线电模块C1,C2,C3例如根据“ETSI TS 102 687 V1.1.1(2011-07)”实现这两个最低层以及对应的功能。为了使用作为非许可频带NLFB的一部分的所述自组织无线电信道,欧洲有以下非许可频带可用:1)用于5.875GHz至5.905GHz频率范围内与安全相关的应用的ITS-G5A;2)用于5.855GHz至5.875GHz频率范围内与安全无关的应用的ITS-G5B;3)用于在5.055GHz至5.925GHz频率范围内运行ITS应用的ITS-G5D。ITS-G5使得可以在基站上下文之外的控制单元NN1,NN2,NN3之间进行通信。ITS-G5标准使得可以立即交换数据帧,并避免了在建立基于小区的网络时所需要的耗费。
通过引用并入本文的文献“ETSI TS 102 687 V1.1.1(2011-07)” 针对ITS-G5描述了“分散式拥塞控制机制”。除其他之外,所述自组织无线电信道用于交换交通安全数据和交通效率数据。无线电模块C1,C2,C3实现例如在文献“ETSI TS 102 687 V1.1.1(2011-07)”中描述的功能。ITS-G5的应用和服务基于形成无线电通信网络2的控制单元NN1,NN2,NN3的协作行为。无线电通信网络2实现了在道路交通中对时间要求严格的应用,这些应用要求快速交换信息,以便及时警告和支持驾驶员和/或车辆。为了保证无线电通信网络2的平稳运行,将“分散拥塞控制”(DCC)用于ITS-G5的所述自组织无线电信道。DCC具有位于ITS体系架构的多个层上的功能。DCC机制基于关于所述无线电信道的知识。通过信道探测获得信道状态信息。
在所示的交通状况下,车辆V1在车辆V2的前方行驶,并且车辆V2在车辆V3的前方行驶。车辆V1到V3形成纵队,即所谓的队列(Platoon)。机动车辆V2和V3自动适配于其与前方行驶的机动车辆V1和V2的相应距离,以便能够执行紧急制动而不会碰撞前方行驶的机动车辆。
在所示的示例中,相应的经过签名的控制消息N1,N2,N3从控制单元NN1,NN2,NN3发送到直接跟随的机动车辆的控制单元NN2,NN3,其中控制单元NN2,NN3基于所包含的签名检查所述控制消息的起源。在一种扩展中,例如利用组密钥对控制消息N1,N2,N3进行加密,使得该组中的机动车辆可以访问控制消息N1,N2,N3。
机动车辆V2被构造为与前方行驶的机动车辆V1保持距离dv12。距离dv12由第一距离dm12和第二距离ds12组成。第一距离dm12考虑了两个车辆V1,V2的行为的不确定性(例如车辆V1和V2的不同制动距离)、传感器测量数据(例如借助于雷达传感器测量的距离)中的不确定性。第二距离ds12也称为附加安全距离,其由车辆V2确定并且在下面更详细地解释。以上说明可以转用于距离dv23,dm23和ds23。
图2示出了用于运行图1中的机动车辆V2的控制单元NN2的示意性流程图。在步骤202中,该方法包括接收从机动车辆V1的车辆侧控制单元NN1发出的第一控制消息,所述第一控制消息包括至少一个行驶状态信息。在步骤204中,该方法包括根据所述第一控制消息确定用于启动机动车辆V2的反应的第一时刻。在步骤206中,该方法包括选择第一时刻作为有效时刻。在步骤208中,该方法包括:如果到所述有效时刻为止都没有成功接收到从车辆侧控制单元NN1发出的其他控制消息,则确定用于启动机动车辆V2的反应的信号。每个控制单元始终只有唯一的有效时刻,通过上述选择对所述有效时刻进行更新。当然,如果明确地向控制单元NN2发信号通知,或者自己的传感器系统指示了所述反应,特别是制动,特别是紧急制动,则控制单元NN2也与控制消息的丢失无关地启动所述反应,特别是紧急制动。
图3示例性地示出了控制消息N1的结构,其中其他控制消息N2,N3具有类似的结构。控制消息N1包括至少一个行驶状态信息FZ1,例如额定速度或额定加速度,其中行驶状态信息FZ1与机动车辆V1或机动车辆V2有关并且代表实际变量或额定变量。此外,控制消息N1包括控制消息N1的产生时刻gt。替代地,控制消息N1不包括产生时刻。
图4示出了用于运行无线电通信网络2的一组控制单元NN1,NN2,NN3的示意性序列图。出于清楚的原因,所示出的时刻部分重合,并且当然可以是不同的。特别地,不必一定存在共同的时基,即控制单元NN1,NN2,NN3的时间同步。此外,以下示例涉及启动制动作为对丢失控制消息的反应。当然,所示出的示例也可以转用于相应的机动车辆V2,V3的其他反应,例如降低发动机功率。
在时刻t1,t4,t7,车辆侧控制单元NN1在步骤110、120、130中确定将在时刻t2,t5,t8传递给通信模块C1并且将在步骤112、122、132中传送到控制单元NN2的控制消息N1(1),N1(2),N1(3)。控制单元NN2在时刻t3,t6,t9成功地接收到控制消息N1(1),N1(2),N1(3),其中在接收时考虑了处理时间。
从时刻t1,t4,t7开始,控制单元NN2确定时刻t9,t12,t15,直到时刻t9,t12,t15为止应当通过控制单元NN2接收到从控制单元NN1发出的至少一个其他控制消息。基于产生时刻t1,t4,t7和安全持续时间ts12(1),ts12(2),ts12(3)来确定时刻t9,t12,t15。安全持续时间ts12(1),ts12(2),ts12(3)是可变的并且适配于行驶状况或网络状况。安全持续时间ts12(1),ts12(2),ts12(3)的确定在下文中更详细地解释。时刻t9,t12,t15也可以称为制动时刻。
替代于在相应的控制消息N1(1),N1(2),N1(3)内通知产生时刻t1,t4,t7,对产生时刻t1,t4,t7进行估计,其中从接收时刻t3,t6,t9开始经由无线电接口发送所述控制消息的时间和排队延迟都被考虑在内。术语“估计”应理解为确定产生时刻t1,t4,t7,所述产生时刻通过制动来保证队列中的安全。此外,仅当时刻t1,t2或t7,t8之间的持续时间不超过最大持续时间时,控制单元NN1,NN2才发送控制消息N1(1),N2(3)。假设控制单元NN2,NN3可以确定传输持续时间,例如基于所使用的调制和编码方案,则控制单元NN2,NN3可以通过在考虑到所述传输持续时间和所述最大持续时间的情况下对所述接收时刻进行反向计算来确定关于所述产生时刻的保守估计。其前提是:如果例如由于无线电信道被占用,在产生所述控制消息后的等待时间超过了定义的最大持续时间,则控制单元NN1,NN2不发送所述控制消息。
如果直到出现在步骤220中确定的时刻t12为止控制单元NN2都没有成功接收到从直接前方行驶的机动车辆的控制单元NN1发出的其他控制消息,则控制单元NN2将在设想的步骤260中,即紧接在出现时刻t12之后,确定图1中用于启动机动车辆V2的紧急制动的信号S2并且启动机动车辆V2的紧急制动。但是,由于仍然在安全持续时间ts12(2)的时间窗口内接收到控制消息N1(3),因此不执行设想的步骤260。对应地,确定被选择为有效时刻或有效制动时刻的时刻t15。
通过周期性地接收控制消息,在正常运行中未达到所述有效时刻。如果没有成功接收到所述控制消息,则启动所述反应,在当前情况下是机动车辆V2的制动。在控制单元NN2的情况下,有效时刻例如在时刻t9,t12,t15。在控制单元NN3的情况下,有效时刻例如在时刻t15,t16和t17。
控制消息N1(3)是通过控制单元NN2最后成功接收到的控制消息。因此,在步骤230中确定的时刻t15是所述有效时刻。在达到所述有效时刻时,在步骤262中借助于对信号S2的确定由控制单元NN2启动机动车辆V2的紧急制动。
在步骤232、242、252中,第二控制单元NN2确定控制消息N2(3),N2(4),N2(5),并且在步骤234、244、254中将这些控制消息传送给控制单元NN3。控制消息N2(3),N2(4),N2(5)包括例如相关联的产生时刻t7,t10,t13,并且在时刻t8,t11,t14被传递给控制单元NN2的通信模块C2。控制单元NN3确定控制消息N2(3),N2(4),N2(5)的接收时刻t9,t12,t15。在步骤336、346、356中,第三控制单元NN3确定时刻t15,t16,t17,并将这些时刻选择为有效时刻。
在一个示例中,控制单元NN2阻止从已经生效的有效时刻t15起朝着控制单元NN3的方向进一步发送控制消息。这引发控制单元NN3在有效时刻t17在步骤362中确定图1的信号S3,并由此启动第三机动车辆V3的制动,特别是紧急制动。
替代地或附加地,在另一示例中,控制消息N2(4),N2(5)中的至少一个包含关于由控制单元NN2启动的反应(特别是制动)的信息。控制单元NN3接收关于由控制单元NN2启动的反应的信息,并且同样启动预定的反应。由于所述安全持续时间大于控制消息的周期持续时间,因此可以随时探测到所述控制消息流的突然结束,并且所述安全持续时间足以启动相应机动车辆的安全制动。
根据所确定的安全持续时间ts12,ts23确定并且适配分别到前方行驶的车辆V1,V2的安全距离。从所确定的安全持续时间ts12,ts23中得出针对图1解释的附加安全距离ds12,ds23,所述附加安全距离是车辆V2,V3保持的与前方行人的距离。在机动车辆V2启动反应的时刻t15和机动车辆V3启动反应的时刻t17之间经过了持续时间tx(5)。第三车辆V3在持续时间tx(5)内覆盖的路径短于第三车辆V3在持续时间ts23(5)内覆盖的路径。因此,足以阻止进一步从控制单元NN2向控制单元NN3发送控制消息,以便在控制单元组内执行安全的制动而不会使跟随的机动车辆与直接在前的机动车辆发生碰撞。
在图4中描述了行驶状况,其中车辆的反应是紧急制动。在另一种状况下,这组机动车辆例如驶过高速公路施工现场。在此,这些距离例如大到使得每个机动车辆可以独立地执行紧急制动。在这种情况下,丢失控制消息会首先导致发动机功率降低。
图5示出了机动车辆V2的示意性框图。通信模块C2产生控制消息N2流。方框502根据控制消息N2产生服务质量QoS12。服务质量QoS12例如是数值,并且例如代表每单位时间控制消息丢失的数量。例如,方框502在设定的时间间隔内预期一定数量的控制消息。如果在时间间隔内接收到的控制消息低于该数量,则服务质量QoS12也将下降。
方框504例如根据控制消息N2确定安全持续时间ts12的最小值ts12_min。从而例如确定接收控制消息N2的周期持续时间,并且将上述最小值ts12_min设定为至少两个周期持续时间。布置在网络单元NN2外部的导航系统506确定导航数据nav,例如车辆V2驶过的道路上的当前车道数量,这指示所使用的无线电信道的占用情况。方框508根据服务质量QoS12、根据最小值ts12_min和根据导航数据nav确定安全持续时间ts12。
方框510确定相应控制消息N2的产生时刻gt(N)。产生时刻gt(N)或者包含在相应的控制消息N2中,或者替代地例如根据所确定的接收时刻来加以估计。从产生时刻gt(N)开始,方框512借助于安全持续时间ts12确定制动时刻tB。方框514将制动时刻tB选择为有效制动时刻,并且方框514监视制动时刻tB的出现。在达到当前有效的制动时刻时,方框514产生信号S2,该信号促使驱动和制动单元516的制动设施BR2对机动车辆V2进行紧急制动。
方框518根据车辆V2的当前速度并且根据安全持续时间ts12确定距离ds12。方框520确定距离dm12。方框522例如通过将dm12和ds12相加来确定距离dv12,并将距离dv12传送至驱动和制动单元516,驱动和制动单元516借助于制动设施BR2和发动机MO2以及未示出的传感器系统来调节所确定的到前方行驶的机动车辆V1的距离dv12。
各个方框例如向控制单元NN2的分配是示例性的,并且当然也可以进行不同的设计。
- 第一车辆侧控制单元和用于运行第一车辆侧控制单元的方法
- 在车辆和路侧控制单元之间进行通信以用于控制感应电能传输至车辆的方法、车辆以及布置结构