被配置为提供视觉反馈的控制装置
文献发布时间:2023-06-19 10:36:57
相关申请的交叉引用
本申请要求2018年9月11日提交的美国临时专利申请号62/729,810和2019年5月10日提交的美国临时专利申请号62/846,275的优先权,所述临时专利申请各自通过引用整体并入本文。
背景技术
根据负载控制系统的某些安装,一个或多个标准机械切换开关可以用更高级的负载控制装置(例如,调光开关)代替。此类负载控制装置可以操作以控制从交流(AC)电源传递到电力负载的电力量。利用负载控制装置替换标准机械切换开关的过程通常需要断开电线,从电气壁箱中移除机械切换开关,将负载控制装置安装到壁箱中以及将电线重新连接到负载控制装置。通常,此类过程由电气承包商或其他熟练的安装人员执行。普通消费者可能不愿意承担完成负载控制装置安装所需的电线接线。因此,需要这样一种负载控制系统,该负载控制系统可以安装到具有机械切换开关的现有电气系统中,而无需进行任何电线接线工作。
发明内容
被配置用于在负载控制系统中使用以控制外部电力负载(诸如照明装置)的控制装置可以提供有关控制装置操作的反馈(例如,简单反馈)。例如,控制装置可以包括被配置为安装到电气壁箱或安装到机械开关上方的基部部分,以及被配置为连接到基部部分的控制单元。控制单元可以包括能够相对于基部部分旋转的旋转部分、具有前表面的致动部分、光源和控制电路。控制电路可以被配置为控制光源以至少照亮致动部分的前表面上的照亮部分(例如,在致动部分的前表面的顶部附近)。响应于旋转部分的旋转,控制电路可以确定用于控制照明装置的第一控制数据,控制光源以照亮致动部分的照亮部分,并且传输包括第一控制数据的控制信号。响应于致动部分的致动,控制电路可以确定用于控制照明装置的第二控制数据,控制光源以照亮致动部分的照亮部分,并且传输包括第二控制数据的控制信号。控制单元还可以包括掩模,该掩模可以位于光源和致动部分之间并且可以具有孔口,由光源发射的光可以通过该孔口照射到致动部分上。另外,控制单元可以被配置为控制光源以从控制单元的后侧发射光,以照亮基部部分安装在其上的机械开关的面板的至少一部分。
控制电路可以被配置为在照明装置处于极限或已经达到极限(例如,高端修剪或最大强度)时提供极限指示。控制电路可响应于确定旋转部分已经连续旋转预先确定的阈值量而在致动部分的照亮部分上提供极限指示。例如,预先确定的阈值量可以是使照明装置从低端强度升高到高端强度所需的旋转量。另外,控制电路可以跟踪照明装置的强度,并且当照明装置的强度已经达到极限时在致动部分的照亮部分上提供极限指示。此外,控制单元可以包括通信电路,该通信电路被配置为接收指示照明装置已经达到极限的消息,并且控制电路可以响应于接收到指示照明装置已经达到极限的消息,在致动部分的照亮部分上提供第一指示。
控制电路还可以被配置为响应于旋转部分的旋转来确定用于调节所述一个或多个照明装置的色温的控制数据。当旋转部分沿第一方向旋转时(例如,以升高色温),控制电路可以将该照亮部分照亮为第一颜色(例如,冷白色或蓝色),并且当旋转部分沿第二方向旋转时(例如,以降低色温),将该照亮部分照亮为第二颜色(例如,暖白色或红色)。
控制装置还可被配置为在控制单元的可见指示器上提供高级反馈。响应于旋转部分的旋转,控制电路可以确定用于控制照明装置的强度的控制数据,控制光源以照亮可见指示器的至少一部分以指示照明装置的强度,并且传输包括控制数据的控制信号。控制电路可以被配置为当照明装置的强度已经达到极限时,控制所述多个光源以在可见指示器上提供极限指示。
被配置用于在负载控制系统中使用以控制外部电力负载(诸如照明装置)的控制装置可以提供有关控制装置操作的反馈。控制装置可以包括被配置为安装到电气壁箱或安装到机械开关上方的基部部分,以及被配置为连接到基部部分的控制单元。该控制装置可以包括控制单元,该控制单元可以连接到基部部分。控制单元可包括致动部分、光源。光源可以被配置为从控制单元的后侧发射光。例如,光源可以被配置为从控制单元的后侧发射光并且照亮机械开关(例如,控制单元安装在其上的机械开关)的面板的一部分。
机械开关的面板的一部分可以被照亮以响应于用户接口事件提供反馈。例如,控制单元可以被配置为响应于致动部分的致动,控制光源照亮机械开关的面板上的围绕控制单元的整个周界。另外,或者替代地,控制单元可以被配置为在检测到致动部分的致动之后控制光源以将围绕控制单元的周界的区段照亮为特定颜色(例如,红色),以指示低电量状况。
附图说明
图1A和图1B描绘了包括一个或多个示例性控制装置的示例性负载控制系统。
图2是示例性控制装置的透视图,该示例性控制装置可以被部署为图1A和图1B所示的负载控制系统的调光开关和/或远程控制装置。
图3A至图3D示出了可由图2的控制装置提供的简单反馈的不同形式。
图3E示出了响应于致动器的致动,图2的控制装置的照亮部分的强度相对于时间的示例曲线图。
图3F示出了图2的控制装置的照亮部分的强度相对于时间的示例曲线图,以便生成“心跳”动画。
图4是另一个示例性控制装置的透视图,该示例性控制装置可以被部署为图1A和图1B所示的负载控制系统的调光开关和/或远程控制装置。
图5A至图5B示出了可由图4的控制装置提供的简单反馈的不同形式。
图6A至图6C示出了可由图4的控制装置提供的高级反馈的不同形式。
图7A是示例性远程控制装置的前透视图,该远程控制装置可被部署为图1A和图1B所示的负载控制系统的远程控制装置,其中控制单元从基部部分分离。
图7B是图7A中描绘的远程控制装置的控制单元和基部部分的后透视图。
图7C是图7A中描绘的远程控制装置的控制单元的前分解图。
图7D示出了图7C中描绘的示例性远程控制装置的控制单元的后分解图。
图8A是示例性远程控制装置的前透视图,该远程控制装置可被部署为图1所示的负载控制系统的远程控制装置,其中控制单元从基部部分分离。
图8B是图8A的远程控制装置的控制单元的后透视图。
图8C是图8A中描绘的远程控制装置的控制单元的前分解图。
图8D示出了图8C中描绘的示例性远程控制装置的控制单元的后分解图。
图8E是以水平取向安装到基座的图8A的控制单元的透视图。
图9示出了示例性控制装置的简化框图,该控制装置可以被部署为图1A和图1B所示的负载控制系统的远程控制装置。
图10至图12是响应于旋转部分的旋转可以由控制装置的控制单元执行的示例性控制过程的流程图。
具体实施方式
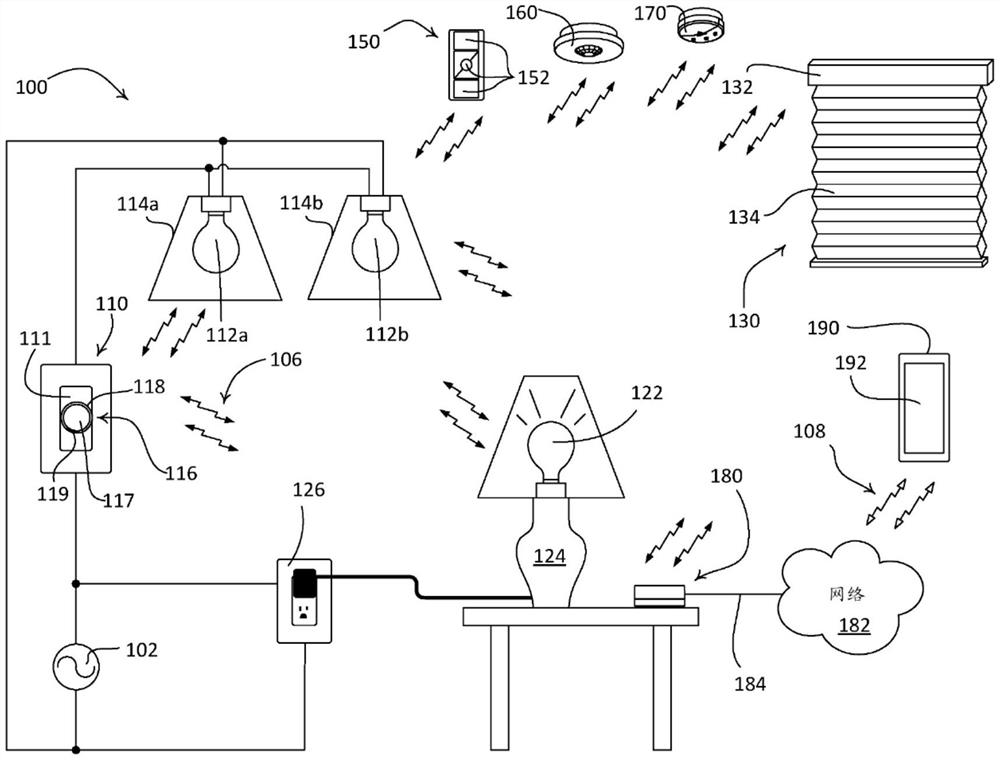
图1A和图1B描绘了负载控制系统100的实例,该负载控制系统可以实现用于传递消息(例如,数字消息)的一种或多种消息类型。如图1A所示,负载控制系统100可以包括各种控制装置,诸如控制器装置和/或负载控制装置。控制器装置可以向负载控制装置发送数字消息,以使负载控制装置控制从AC电源102向负载控制系统100中的电力负载提供的电力量。
负载控制装置可以控制房间和/或建筑物内的电力负载。每个负载控制装置可能够响应于来自控制器装置的通信,直接控制提供给电力负载的电力量。示例性负载控制装置可以包括照明装置112a、112b和/或照明装置122(例如,灯泡、镇流器、LED驱动器等中的负载控制装置)。照明装置可以是照明负载本身,或者是包括照明负载和照明负载控制器的装置。
控制器装置可以通过将数字消息传输到负载控制装置来间接控制提供给电力负载的电力量。数字消息可以包括控制数据,诸如控制指令(例如,负载控制指令)、按钮或致动器的致动的指示、或者使负载控制装置确定用于控制电力负载的负载控制指令的另一指示。示例性控制器装置可以包括远程控制装置116。控制器装置可以包括有线装置或无线装置。
控制装置(例如,控制器装置和/或负载控制装置)可以经由有线和/或无线通信与其他控制装置和/或其他装置通信。控制装置可以使用以无线信号传输的数字消息进行通信。例如,控制装置可以经由射频(RF)信号106进行通信。可以经由任何合适的RF通信协议(例如,
照明装置122可以安装在插入装置124中,诸如灯(例如,台灯)。插入装置124可以串联电连接的方式联接在AC电源102和照明装置122之间。插入装置124可以插入由AC电源102供电的电插座126中。插入装置124可以插入到电插座126中,或者插入到单独的插入负载控制装置中,该插入负载控制装置插入到电插座126中并且被配置为控制传递到照明装置122的电力。
照明装置112a、112b可以由壁装式负载控制装置110控制。尽管在图1A中示出了照明装置112a、112b,但是可以实现可以由壁装式负载控制装置110和/或AC电源102支撑的任何数量的照明装置。壁装式负载控制装置110可以串联电连接的方式联接在AC电源102与照明装置112a、112b之间。壁装式负载控制装置110可以包括机械开关111(例如,先前安装的灯开关),该机械开关可以响应于切换致动器(未示出)的致动而断开和闭合,以用于控制从AC电源102传递到照明装置112a、112b的电力(例如,用于打开和关闭照明装置112a、112b)。照明装置112a、112b可安装在相应的天花板安装的筒灯器材114a、114b或安装到另一表面的其他筒灯器材中。壁装式负载控制装置110可以适于壁装式安装在标准电气壁箱中。
远程控制装置116可以被配置为经由RF信号106传输消息,以控制照明装置112a、112b。远程控制装置116可以是安装在机械开关111的切换致动器上方的改型远程控制装置。远程控制装置116可以被配置为将机械开关111的切换致动器保持在“打开”位置(例如,通过在处于“打开”位置时覆盖开关),以保持从AC电源102到照明装置112a、112b的电力流动。远程控制装置116可以包括可以被致动(例如,朝向机械开关111推入)的致动部分117和可以(例如,相对于机械开关111)旋转的旋转部分118(例如,旋钮)。尽管公开了旋转部分118,但是远程控制装置116可以包括另一种类型的强度调节致动器,诸如线性滑块、细长的触敏致动器、摇杆开关、单独的升高/降低致动器或另一种形式的强度调节致动器。远程控制装置116可以是电池供电的。另外,远程控制装置116可以安装到另一结构(例如,除了机械开关111的切换致动器)诸如壁,可以附接到位于水平表面上的基座,或者可以是手持式的。此外,壁装式负载控制装置110可以包括壁装式远程控制装置,该壁装式远程控制装置代替先前安装的机械开关111,并且可以被配置为作为远程控制装置116操作,以控制照明装置112a、112b(例如,通过经由RF信号106传输消息)。此类壁装式远程控制装置可以从AC电源102获取电力。
响应于远程控制装置116(例如,响应于远程控制装置116的致动部分117的致动),照明装置112a、112b可以被打开或关闭,或者可以调节强度水平。例如,照明装置112a、112b可以通过在远程控制装置116处识别的切换事件来切换打开或关闭。切换事件可以是在远程控制装置116处识别的用户事件。可以致动远程控制装置116的致动部分117以切换打开或关闭照明装置112a、112b。可以旋转远程控制装置116的旋转部分118以调节照明装置112a、112b的强度。当远程控制装置116的旋转部分118被转动持续预定义角距离和/或持续预定义时间量,并且/或者远程控制装置116的致动部分117被致动时,可以识别切换事件。可以通过分别在一个方向或另一个方向上旋转远程控制装置116的旋转部分118来增加或减小照明装置112a、112b的强度水平。例如,可以在高端强度(例如,最大强度,诸如大约100%)和低端强度(例如,最小强度,诸如大约0.1%-10%)之间调节每个照明装置112a、112b的强度水平。尽管在图1A和图1B中示出为包括旋钮,远程控制装置116可以包括可由用户致动的换档开关(paddle switch)、用户可以在其上轻扫手指的线性控制件、升高/降低滑块、摇杆开关或能够接收用户接口事件作为命令的另一种类型的控制件。
远程控制装置116可在可见指示器119(例如,状态指示器)上向远程控制装置116的用户提供反馈(例如,视觉反馈)。可见指示器119可以提供不同类型的反馈。反馈可以包括指示由用户或其他用户接口事件进行的致动、由远程控制装置116控制的电力负载的状态和/或由远程控制装置116控制的负载控制装置的状态的反馈。可以响应于用户接口事件和/或响应于接收到的指示负载控制装置和/或电力负载的状态的消息来显示反馈。可见指示器119可以由一个或多个发光二极管(LED)照亮以提供反馈。例如,可见指示器119可以是包括在远程控制装置116的致动部分117的整个周界或其一部分周围的光条。可见指示器119也可以是或者替代地是远程控制装置116上的一条线上的光条,例如当远程控制装置是换档开关或线性控制件时。另外,可见指示器119可以是致动部分117上的照亮部分。
反馈的示例性类型可以包括照亮整个可见指示器119(例如,照亮到不同水平),闪烁或脉动可见指示器119中的一个或多个LED,改变可见指示器119上的一个或多个LED的颜色(例如,色温),以及/或者照亮可见指示器119中的一个或多个LED的不同部段以提供动画(例如,用于升高和降低照明水平的顺时针和逆时针动画)。可见指示器119上的反馈可以指示电力负载或负载控制装置的状态,诸如灯(例如,照明装置112a、112b、122)的照明强度水平、音频装置的音量水平、电动窗帘的遮光水平、以及/或者风扇或以不同速度操作的其他类似类型的装置的速度。可见指示器119上的反馈可以基于不同预设的选择而改变。例如,可以在可见指示器119上照亮不同的一个或多个LED,以识别不同的预设(例如,照明装置112a、112b、122的预设强度水平和/或负载控制装置的其他预设配置)。
可见指示器119或其一部分可以被打开或关闭以指示照明装置112a、112b、122中的一个或多个的状态。例如,可见指示器119可以被关闭以指示照明装置112a、112b、122处于关闭状态。整个可见指示器或其一部分可以被打开以指示照明装置112a、112b、122处于打开状态。可见指示器119的被打开的部分可以指示照明装置112a、112b、122中的一个或多个的强度水平。例如,当照明装置112a、112b、122处于50%强度水平时,可见指示器119的50%可以被打开以反映照明装置112a、112b、122的强度水平。
远程控制装置116可以例如响应于在远程控制装置116处接收到的致动或其他用户接口事件,在可见指示器119上向用户提供简单反馈。例如,简单反馈可以向用户指示远程控制装置116正在正确地操作(例如,响应于切换按钮的致动或旋转)。响应于按钮按压,该简单反馈可以照亮或闪烁一个或多个LED。该简单反馈可以指示远程控制装置116或其上的按钮已被致动。该简单反馈可以指示响应于用户接口事件已经选择了命令。例如,该简单反馈可以响应于切换事件的致动而提供闪烁序列。该简单反馈可以响应于远程控制装置116的顺时针旋转和逆时针旋转(例如,如图11C至图11D所示)在不同的照明水平下提供可见指示器119的连续照亮(solid illumination)。由于简单反馈可以提供不指示负载控制装置的状态的信息,所以可见指示器119可以更多地作为其他类型的状态的可见指示器来操作,或者可以根本不指示装置的状态。
远程控制装置116可以基于对负载控制装置的状态的了解,在可见指示器119上向用户提供高级反馈,使得该反馈可以向用户提供状态信息。例如,远程控制装置116的旋转可以使视觉反馈跟踪照明装置112a、112b、122的光水平。光水平可以存储在远程控制装置116中(例如,如果有一个远程控制装置被分配给照明装置112a、112b、122,并且照明装置112a、112b、122可以作为一组从专用远程控制装置116进行控制),或者可以由远程控制装置116响应于从远程控制装置116传输的查询消息而接收。对于响应于用户接口事件(诸如切换事件)的高级反馈,当打开照明装置112a、112b、122时,可见指示器119上的灯可以从关闭增加到打开光水平,并且当关闭照明装置112a、112b、122时,从打开光水平减小到关闭。在2018年4月26日公开的标题为“CONTROLLING GROUPS OF ELECTRICAL LOADS”的共同转让的美国专利申请公布号2018/0114434中更详细的描述了提供简单和/或高级反馈的远程控制装置的示例,所述专利申请的全部公开内容通过引用并入本文。
远程控制装置116可以基于与远程控制装置116相关联的负载控制装置的数量,在可见指示器119上提供不同的反馈。例如,当单个照明装置112a与远程控制装置116相关联时,与当多个照明装置112a、112b、122与远程控制装置116相关联时相比,远程控制装置116可以在可见指示器119上提供不同的反馈。当单个负载控制装置与远程控制装置116相关联时,远程控制装置116可以在可见指示器119上提供高级反馈。当多个负载控制装置与远程控制装置116相关联时,远程控制装置116可以在可见指示器119上提供简单反馈。当远程控制装置116与多个负载控制装置相关联时,可以提供简单反馈,因为负载控制装置可以是不同类型的装置,当前可以被不同地控制,可以处于不同水平(例如,不同强度水平),以及/或者可能处于远程控制装置116未知的水平。
远程控制装置116可以基于相关联的负载控制装置的负载是否同步在可见指示器上提供不同反馈。当负载同步时(例如,接收到相关联的负载控制装置的相同状态),远程控制装置116可以在可见指示器119上提供高级反馈。例如,响应于用于控制照明装置112a、112b、122的强度水平的切换事件或旋转(例如,在某个方向上持续预定义角距离和/或持续预定义时间量),远程控制装置116可以从睡眠状态唤醒,并且向照明装置112a、112b、122查询其当前状态。远程控制装置116可以接收照明装置112a、112b、122的当前状态(例如,打开/关闭状态、照明水平、颜色等),并且确定照明装置112a、112b、122处于相同状态。远程控制装置116上的可见指示器119可以指示响应于查询消息而接收到的照明装置112a、112b、122的状态。在远程控制装置116保持唤醒时,可见指示器119可以随着状态的改变反映照明装置112a、112b、122中的一个或多个的更新状态。在预定义时间段之后,远程控制装置116可以返回到睡眠状态。可见指示器119可以在睡眠状态下关闭以节省电池电量。
当负载不同步时(例如,接收到相关联的负载控制装置的不同状态),远程控制装置116可以在可见指示器119上提供简单反馈或高级反馈。例如,响应于用于控制照明装置112a、112b、122的强度水平的切换事件或旋转(例如,在某个方向上持续预定义角距离和/或持续预定义时间量),远程控制装置116可以从睡眠状态唤醒,并且向照明装置112a、112b、122查询其当前状态。远程控制装置116上的可见指示器119可以指示响应于查询消息而接收到的照明装置112a、112b、122中的一个或多个的状态。当照明装置112a、112b、122的状态同步时,远程控制装置116可以提供高级反馈,使得远程控制装置116上的可见指示器119指示所有照明装置112a、112b、122正在操作的强度水平。
当照明装置112a、112b、122的状态不同步时,远程控制装置116可以在可见指示器119上提供简单反馈。例如,远程控制装置116上的可见指示器119可以反映首先响应于查询消息的照明装置112a、112b、122的当前状态、或者该组中特定照明装置112a、112b、122的状态。例如,响应于对照明装置112a、112b、122的当前状态的查询消息,照明装置112a可以首先响应其处于10%的强度水平。远程控制装置116上的可见指示器119可以在可见指示器119上反映照明装置112a的当前状态。该组照明装置112a、112b、122可以是已经在存储器中与远程控制装置116相关联的照明装置,或者是与组标识符一起存储在存储器中以便一起被控制的照明装置。
当照明装置112a、112b、122的状态不同步时,可见指示器119可以提供代表该组照明装置112a、112b、122的状态的高级反馈。例如,可见指示器119可以指示该组照明装置112a、112b、122的平均强度或者大多数照明装置112a、112b、122的状态。可见指示器119可以通过以下方式提供高级反馈以指示该组照明装置112a、112b、122的状态:在大多数照明装置112a、112b、122处于打开状态时点亮整个可见指示器119;在大多数照明装置112a、112b、122处于关闭状态时关闭可见指示器119;点亮可见指示器119的识别该组照明装置112a、112b、122的平均照明水平的部分;将可见指示器119的强度增加到反映照明装置112a、112b、122的强度的百分比等。
当照明装置112a、112b、122的状态不同步时,可见指示器119可以提供指示照明装置112a、112b、122不同步的简单或高级反馈。例如,远程控制装置116可以通过使整个可见指示器119点亮、熄灭或闪烁以指示照明装置112a、112b、122不同步来提供简单反馈。远程控制装置116可以通过以下方式提供高级反馈:在显示照明装置112a、112b、122的平均强度水平时闪烁或脉动可见指示器119;使可见指示器119在照明装置112a、112b、122的强度水平之间周期性地转变;或者使可见指示器119在照明装置112a、112b、122的最大强度水平和最小强度水平之间周期性地转变。当该组照明装置112a、112b、122不同步时,可以不提供反馈,可以提供恒定的反馈指示,或者可以提供指示该组照明装置不同步的反馈(例如,闪烁的LED)。
远程控制装置116可以被配置为响应于确定“缺失”照明装置112a、112b、122中的一个或多个来显示反馈(例如,简单反馈)。例如,远程控制装置可以被配置为闪烁整个可见指示器119(例如,以特定颜色诸如红色)和/或提供动画来指示照明装置112a、112b、122中的一个或多个缺失。远程控制装置116可以被配置为例如响应于未接收到对被传输到照明装置112a、112b、122中的一个的查询消息的响应而确定该特定照明装置缺失。例如,如果照明装置112a、112b、122中的一个已经从其器材或灯移除(例如,旋开)、拔出、出现故障,对应的灯开关关闭(例如,串联的灯开关关闭,而其他灯开关打开)以及/或者已经达到寿命终点,则该照明装置可能“缺失”。
如果与远程控制装置116相关联的负载控制装置(例如,照明装置112a、112b、122)未与其他远程控制装置相关联,则远程控制装置116可以提供高级反馈。如果与远程控制装置116相关联的负载控制装置(例如,照明装置112a、112b、122)中的一个或多个还与其他远程控制装置相关联,则远程控制装置116可以提供简单反馈。这可以允许与远程控制装置116相关联的一组单独的负载控制装置的更精细的反馈,同时防止当其他远程控制装置正在控制多个负载控制装置(例如,照明装置112a、112b、122)时的连续更新或混淆。
远程控制装置116可以经由RF信号106传输数字消息,以控制照明装置112a、112b、122。远程控制装置116可以被配置为使用绝对控制来调节照明装置112a、112b、122的强度,以便将照明装置112a、112b、122的强度控制到绝对水平(例如,特定水平)。例如,远程控制装置116可以传输数字消息,该数字消息包括识别照明装置可以改变到的照明水平的移动到水平(move-to-level)命令(例如,转到水平(go-to-level)或转到(go-to)命令)。移动到水平命令可以包括在照明装置处可以改变照明水平的时间量。移动到水平命令可以指示“打开”事件或“关闭”事件,以分别打开或关闭照明装置112a、112b、122。例如,“打开”事件可以用100%照明水平或另一预设照明水平来指示。可以用0%强度水平指示“关闭”事件。“打开”事件和/或“关闭”事件的照明水平也可以或替代地存储在照明装置112a、112b、122处,并且照明装置可以在远程控制装置116处接收到“打开”事件或“关闭”事件发生的指示时改变到该照明水平。当远程控制装置116在一个方向上旋转持续预定义角距离和/或持续预定义时间量时,数字消息可以指示“打开”事件。作为实例,当远程控制装置116旋转100毫秒(ms)时,远程控制装置116可以传输数字消息。当远程控制装置116在相反方向上旋转持续预定义角距离和/或持续预定义时间量时,数字消息可以指示“关闭”事件。当按压远程控制器装置116时(例如,当按压远程控制装置的表面上的按钮或按压远程控制装置116时),数字消息可以指示“打开”事件或“关闭”事件。可以在数字消息中利用切换命令来指示“打开”事件或“关闭”事件,该切换命令指示照明装置112a、112b、122从“打开”切换到“关闭”,或者反之亦然。
响应于远程控制装置116处的用户接口事件(例如,致动、旋转、手指轻扫等)或接近度感测事件(例如,感测电路感测到远程控制装置116附近的占用),远程控制装置116可以确定起点(例如,动态起点),从该起点可以控制照明装置112a、112b、122中的一个或多个的照明水平。旋转部分118的每次旋转可以使远程控制装置116确定可以从其执行控制的动态起点。响应于用户接口事件和/或接近度感测事件(例如,感测电路感测到远程控制装置116附近的占用),远程控制装置116可以向照明装置112a、112b、122查询当前状态(例如,从睡眠模式唤醒之后)。照明装置112a、112b、122中的一个或多个的当前状态可以用于设置动态起点,远程控制装置116可以从该动态起点执行控制。例如,远程控制装置116可以将旋转部分118的动态起点设置为照明装置112a、112b、122中的响应于查询的第一个或者预定义照明装置112a、112b、122的当前强度水平(例如,打开、关闭、10%、20%等)。
在另一个实例中,远程控制装置116可以基于多个照明装置112a、112b、122的强度水平来设置旋转部分118的动态起点。例如,远程控制装置116可以将旋转部分118的动态起点设置为照明装置112a、112b、122的平均强度水平(例如,打开、关闭、10%、20%等),或者大多数照明装置112a、112b、122的共同照明强度(例如,打开、关闭、10%、20%等)。例如,当顺时针旋转旋转部分118以提高照明装置的强度水平时,远程控制装置116可以将旋转部分118的动态起点设置为照明装置112a、112b、122的最大水平,或者当逆时针旋转旋转部分118以降低照明装置的强度水平时,将旋转部分的动态起点设置为照明装置112a、112b、122的最小水平。可见指示器119可以被照亮作为反馈,以向用户反映动态起点。例如,远程控制装置116可以照亮可见指示器119的一部分,该部分反映被设置为动态起点的照明强度。
远程控制装置116可以基于用户接口事件从动态起点计算强度水平的增加或减小。例如,远程控制装置116可以基于旋转部分118转动的距离或时间量来计算强度水平的增加或减小。从用户与旋转部分118的初始交互的点的旋转可以用于识别从动态起点开始的强度水平的增加或减小。当远程控制装置116包括线性控制件时,远程控制装置116可以基于用户在线性控制件上向上或向下轻扫手指的距离或时间量来计算强度水平的增加或减小。用户的手指从用户与线性控制件的初始交互的点的轻扫可以用于识别强度水平从动态起点的增加或减小。
可以从用户的初始交互来计算更新的强度水平,并且将其存储在远程控制装置116处。例如,当远程控制装置116使用绝对控制时,更新的强度水平可以被包括在从远程控制装置116传输到照明装置112a、112b、122的移动到水平命令中。
当远程控制装置116使用绝对控制时,由可见指示器119显示的视觉反馈可以在移动到水平命令中的信息中提供或从该信息中导出。例如,远程控制装置116可以将在移动到水平命令中传输的强度水平反映在可见指示器119中。
远程控制装置116可以传输数字消息,该数字消息被配置为当旋转部分118在某个方向上(例如,顺时针)旋转时增加照明装置112a、112b、122的照明水平。如前所述,远程控制装置116可以被配置为使用绝对控制将照明装置112a、112b、122的强度调节到绝对水平。另外地或替代地,远程控制装置116可以被配置为使用相对控制来调节照明装置112a、112b、122的强度,以将照明装置112a、112b、122的强度调节相对量。例如,远程控制装置116可以传输数字消息,该数字消息被配置为当远程控制装置116在相反方向上(例如,逆时针)旋转时减小照明装置112a、112b、122的照明水平。数字消息可以包括按速率移动(move-with-rate)命令,该命令可以使照明装置112a、112b、122将它们相应的强度水平改变预定义的量。按速率移动命令可以包括在照明装置处可以改变照明水平的时间量。按速率移动命令可以使照明装置112a、112b、122保持其相对或成比例的强度水平和/或相应强度水平的差异。远程控制装置116可以发送数字消息,以在旋转持续预定义角距离和/或持续预定义时间量时将照明水平增加或减小预定义的量。增加或减小的量可以在数字消息中指示,或者可以在照明装置112a、112b、122处预定义。
当远程控制装置116使用相对控制进行操作时并且当远程控制装置116使用绝对控制进行操作时,可见指示器119可以被不同地控制。当执行绝对控制时,远程控制装置116可以在可见指示器119上提供高级反馈,因为负载控制装置(例如,照明装置112a、112b、122)中的每一个可以是同步的。当执行相对控制时,远程控制装置116可以提供简单反馈,因为负载控制装置(例如,照明装置112a、112b、122)中的每一个可能不同步。当使用相对控制时,可见指示器119可能不被照亮以提供照明装置112a、112b、122的强度的反馈。当远程控制装置116升高和降低照明装置112a、112b、122的强度水平时,可见指示器119可以被照亮到不同的强度。例如,当升高照明装置112a、112b、122的强度水平时,可见指示器119可以被照亮到第一强度(例如,66%),并且当降低照明装置112a、112b、122的强度水平时,可以被照亮到第二强度(例如,33%)。替代地或附加地,可见指示器119可以被照亮以匹配该组照明装置112a、112b、122的最大强度或最小强度。
控制模式(例如,相对控制或绝对控制)可以在远程控制装置116处动态地更新。例如,远程控制装置116可以根据与远程控制装置116相关联的照明装置112a、112b、122的数量来改变控制模式。当与单个照明装置相关联时,远程控制装置116可以使用绝对控制。当与多个照明装置相关联时,远程控制装置116可以使用相对控制。还可以或替代地基于照明装置112a、112b、122是同步还是不同步来更新控制模式。当照明装置112a、112b、122同步时,远程控制装置116可以使用绝对控制。当照明装置112a、112b、122不同步时,远程控制装置116使用相对控制。
可见指示器119提供的视觉反馈可以根据在远程控制装置116处使用的控制模式来动态地更新。远程控制装置116可以在使用相对控制时根据简单反馈模式以及在使用绝对控制时根据高级反馈模式来提供反馈。例如,高级反馈模式可以提供指示作为整个可见指示器119的一部分的一个或多个照明装置的强度水平的反馈。简单反馈模式可以提供简单反馈,当升高或降低强度时,该简单反馈将整个可见指示器119照亮到不同的水平。
经由RF信号106传输的数字消息可以是多播消息。例如,包括移动到水平命令的数字消息可以作为多播消息传输。多播消息可以包括用于控制作为多播组的一部分的照明装置112a、112b、122的组标识符。当照明装置112a、112b、122与组标识符相关联(例如,通过将组标识符存储在其上)以识别传输到该组的多播消息时,它们可以是多播组的一部分。与组标识符相关联的照明装置112a、112b、122可以识别多播消息并根据多播消息中的命令控制对应的照明负载。照明装置112a、112b、122可以转发具有组标识符的多播消息,以由与该组标识符相关联的其他照明装置进行识别和负载控制。
该组可以在负载控制系统100的调试或配置时形成。当远程控制装置116处于关联模式(例如,在选择一个或多个按钮时进入)时,远程控制装置116可以生成组标识符,并且将组标识符发送至照明装置112a、112b、122和/或集线器装置。存储组标识符的装置可以是与远程控制装置116相关联的该组装置的一部分,并且可以响应于组消息。
远程控制装置116可以经由RF信号106将数字消息作为多播消息和/或单播消息传输。例如,包括按速率移动命令或移动到水平命令的数字消息可以作为单播消息传输。单播消息可以直接从远程控制装置116发送,或者经由跳(hop)发送到照明装置112a、112b、122中的每一个。远程控制装置116可以单独地将单播消息发送到与远程控制装置116相关联的照明装置112a、112b、122中的每一个,以用于执行负载控制。远程控制装置116可以将与其相关联的照明装置112a、112b、122中的每一个的唯一标识符存储在存储器中。远程控制装置116可以为每个照明装置112a、112b、122生成单独的单播消息,并且将单播消息独立地寻址到照明装置112a、112b、122。单播消息还可以包括远程控制装置116的唯一标识符。照明装置112a、112b、122可以通过识别存储在相关联数据集中的它们自己的唯一标识符和/或远程控制装置的对应标识符来识别传送给它们的单播消息。照明装置112a、112b、122可以根据数字消息中的指令(例如,负载控制指令)进行操作,该数字消息包括它们自己的唯一标识符和/或相关联装置(诸如远程控制装置116)的唯一标识符。
远程控制装置116可以传输包括按速率移动命令的数字消息(例如,作为单播消息和/或多播消息),以便当用户在一个方向或另一个方向上转动远程控制装置116持续预定义角距离和/或持续预定义时间量时,以预定义增量增加或减小照明装置112a、112b、122的照明强度水平。当用户继续转动远程控制装置116时,远程控制装置116可以继续向照明装置112a、112b、122传输数字消息。例如,远程控制装置116可以识别预定义距离或预定义时间的旋转,并且发送一个或多个数字消息以指示照明装置112a、112b、122各自增加百分之十(10%)。远程控制装置116可以识别持续预定义角距离和/或持续预定义时间量的连续旋转,并且发送数字消息以指示照明装置112a、112b、122再次增加百分之十(10%)。
远程控制装置116还可以或替代地发送用于移动到水平命令(例如,“打开”命令、“关闭”命令、切换命令等)的数字消息,以打开/关闭照明装置112a、112b、122。当检测到打开事件或关闭事件时,远程控制装置116可以将一个或多个数字消息传输到照明装置112a、112b、122。例如,远程控制装置116可以识别旋转或致动并且发送数字消息以指示照明装置112a、112b、122打开/关闭。远程控制装置116可以通过在打开之后发送按速率移动命令来进行操作。例如,远程控制装置116可以识别打开之后持续预定义角距离和/或持续预定义时间量的旋转,并且发送数字消息以指示照明装置112a、112b、122增加/减小预定义强度(例如,百分之十(10%))。
本文描述的实施方案不限于远程控制装置。其他控制器装置也可以相同或相似的方式使用。例如,实施方案可以包括如本文所述的传送数字消息的有线控制装置和/或插入控制装置。
图1B示出了具有其他装置的示例性负载控制系统100。例如,负载控制系统100可以包括其他控制装置,诸如控制器装置和/或负载控制装置。负载控制装置可能够基于从控制器装置(可以是输入装置)接收到的数字消息,控制提供给相应电力负载的电力量。该数字消息可以包括负载控制指令或使负载控制装置确定用于控制电力负载的负载控制指令的另一指示。
负载控制装置的示例可以包括电动窗帘130和/或照明装置112a、112b、122,但是可以实现其他负载控制装置。控制器装置可以包括远程控制装置150、占用传感器160、日光传感器170和/或网络装置190,但是可以实现其他控制器装置。控制器装置可以以类似于本文所述的远程控制装置116的配置来执行通信。负载控制装置可以以类似于本文描述的照明装置112a、112b、122的配置来执行通信。
负载控制装置可以经由无线信号例如射频(RF)信号106(例如,
电池供电的远程控制装置150可以包括一个或多个致动器152(例如,打开按钮、关闭按钮、升高按钮、降低按钮或预设按钮中的一个或多个)。电池供电的远程控制装置150可以响应于致动器152中的一个或多个的致动来传输RF信号106。电池供电的远程控制装置150可以是手持式的。电池供电的远程控制装置150可以垂直地安装在壁,或者支撑在基座上以安装在桌面上。在2012年12月11日发布的标题为“WIRELESS BATTERY-POWERED REMOTECONTROL HAVING MULTIPLE MOUNTING MEANS”的共同转让的美国专利号8,330,638和2012年11月15日公布的标题为“CONTROL DEVICE HAVING A NIGHTLIGHT”的美国专利申请公布号2012/0286940中更详细地描述了电池供电的远程控制装置的示例,所述专利申请的全部公开内容通过引用并入本文。
远程控制装置150可以是能够经由无线通信来控制负载控制装置的无线装置。远程控制装置150可以附接到壁或者与壁分离。在1993年9月28日发布的标题为“LIGHTINGCONTROL DEVICE”的美国专利号5,248,919;2013年6月25日发布的标题为“WIRELESSBATTERY-POWERED REMOTE CONTROL WITH LABEL SERVING AS ANTENNA ELEMENT”的美国专利号8,471,779;以及2017年6月13日发布的标题为“WIRELESS LOAD CONTROL DEVICE”的美国专利号9,679,696中更详细地描述了远程控制装置的示例,所述专利申请的全部公开内容通过引用并入本文。
占用传感器160可以被配置为检测其中安装有负载控制系统100的空间中的占用和/或空闲状况。占用传感器160可以响应于检测到占用或空闲状况经由RF通信信号106向负载控制装置传输数字消息。占用传感器160可以作为空闲传感器操作,使得响应于检测到空闲状况而传输数字消息(例如,响应于检测到占用状态而不传输数字消息)。占用传感器160可以进入关联模式,并且可以响应于占用传感器160上的按钮的致动经由RF通信信号106传输关联消息。在2011年8月30日发布的标题为“RADIO-FREQUENCY LIGHTING CONTROLSYSTEM WITH OCCUPANCY SENSING”的共同转让的美国专利号8,009,042;2012年6月12日发布的标题为“METHOD AND APPARATUS FOR CONFIGURING A WIRELESS SENSOR”的美国专利号8,199,010;以及2012年7月24日发布的标题为“BATTERY-POWERED OCCUPANCY SENSOR”的美国专利号8,228,184中更详细地描述了具有占用传感器和空闲传感器的RF负载控制系统的示例,所述专利申请的全部公开内容通过引用并入本文。
日光传感器170可以被配置为测量其中安装有负载控制系统100的空间中的总光强度。日光传感器170可以经由RF通信信号106传输包括所测量的光强度的数字消息,以响应于测量的光强度来控制负载控制装置。日光传感器170可以进入关联模式,并且可以响应于日光传感器170上的按钮的致动经由RF通信信号106传输关联消息。在2013年4月2日发布的标题为“METHOD OF CALIBRATING A DAYLIGHT SENSOR”的共同转让的美国专利号8,410,706;以及2013年5月28日发布的标题为“WIRELESS BATTERY-POWERED DAYLIGHT SENSOR”的美国专利号8,451,116中更详细地描述了具有日光传感器的RF负载控制系统的示例,所述专利申请的全部公开内容通过引用并入本文。
电动窗帘130可以安装在窗户的前面,以用于控制进入其中安装有负载控制系统100的空间的日光量。电动窗帘130可以包括例如蜂窝式遮阳帘、卷帘、帏帐、罗马帘、软百叶帘、波斯帘、折叠窗帘、张紧卷帘系统或其他合适的电动窗罩。电动窗帘130可以包括用于调节电动窗帘130的覆盖材料134的位置的马达驱动单元132,以便控制进入空间的日光量。电动窗帘130的马达驱动单元132可具有RF接收器和安装在电动窗帘130的马达驱动单元132上或从其延伸的天线。马达驱动单元132可以响应于数字消息以增加或减小覆盖材料134的水平。电动窗帘130的马达驱动单元132可以是电池供电的,或者可以从外部直流(DC)电源接收电力。在2015年2月10日发布的标题为“MOTORIZED WINDOW TREATMENT”的共同转让的美国专利号8,950,461;以及2015年8月25日发布的标题为“BATTERY-POWERED ROLLERSHADE SYSTEM”的美国专利号9,115,537中更详细地描述了电池供电的电动窗帘的示例,所述专利申请的全部公开内容通过引用并入本文。
由控制器装置传输的数字消息可以包括命令和/或识别信息,诸如与传输控制器装置相关联的序列号(例如,唯一标识符)。在负载控制系统100的配置过程期间,控制器装置中的每一个可以与照明装置112a、112b、122和/或电动窗帘130相关联,使得照明装置112a、112b、122和/或电动窗帘130可以响应于由控制器装置经由RF信号106传输的数字消息。在2008年5月15日公布的标题为“RADIO-FREQUENCY LIGHTING CONTROL SYSTEM”的共同转让的美国专利申请公布号2008/0111491;以及2016年6月14日公布的标题为“TWO-PARTLOAD CONTROL SYSTEM MOUNTABLE TO A SINGLE ELECTRICAL WALLBOX”的美国专利号9,368,025中更详细地描述了在配置过程期间关联无线控制装置的示例,所述专利申请的全部公开内容通过引用并入本文。
负载控制系统100可以包括集线器装置180(例如,系统桥和/或系统控制器),该集线器装置被配置为能够与网络182(例如,无线或有线局域网(LAN))通信。集线器装置180可以经由有线数字通信链路184(例如,以太网通信链路)连接到路由器。路由器可以允许与网络182通信,例如,以访问互联网。集线器装置180可以无线地连接到网络182,例如,使用无线技术诸如
可以经由一种或多种协议来传输RF信号106。例如,远程控制装置116和远程控制装置150可经由不同于其他装置的另一协议(例如,
集线器装置180可以作为负载控制系统100的中央控制器操作,并且/或者在负载控制系统的控制装置(例如,照明装置、电动窗帘等)和/或网络182之间中继数字消息。集线器装置180可以从控制器装置接收数字消息,并且配置该数字消息以用于传送到负载控制装置。例如,集线器装置180可以配置多播消息和/或单播消息以进行传输,如本文所述。集线器装置180可以在负载控制系统100处现场或在远程位置处。尽管集线器装置180被示出为单个装置,但是负载控制系统100可以包括多个集线器和/或其功能可以分布在多个装置上。
负载控制系统100可以包括网络装置190,诸如智能电话(例如,
网络装置190可以包括视觉显示器192。视觉显示器192可以包括触摸屏,该触摸屏可以包括例如在视觉显示器上方移位的电容式触摸板,使得视觉显示器可以显示可以由用户致动的软按钮。除了视觉显示器192之外,网络装置190还可以包括多个硬按钮,例如,物理按钮(未示出)。网络装置190可以下载产品控制应用程序,以允许网络装置190的用户控制负载控制系统100。响应于所显示的软按钮和/或硬按钮的致动,网络装置190可以通过本文描述的无线通信将数字消息传输到负载控制装置和/或集线器装置180。
可以使用集线器装置180和/或网络装置190来编程和配置负载控制系统100的操作。在2018年7月17日发布的标题为“COMMISSIONING LOAD CONTROL SYSTEMS”的共同转让的美国专利号10,027,127中更详细地描述了无线负载控制系统的配置过程的示例,所述专利申请的全部公开内容通过引用并入本文。
当在负载控制系统100中实现集线器装置180和/或其他控制装置时,远程控制装置116可以接收指示。远程控制装置116可以与其他控制器装置(例如,远程控制装置150、占用传感器160、日光传感器170、网络装置190等)相关联,或者可以在控制器装置与负载控制系统100中的另一装置(例如,照明装置112a、112b、122或集线器装置180)相关联时以其他方式被通知。远程控制装置116可以与集线器装置180相关联,或者可以在集线器装置180被实现到系统100中时以其他方式被通知(例如,经由来自集线器装置180的消息、来自与集线器装置180相关联的照明装置112a、112b、122的关联的通知等)。
远程控制装置116可以操作以基于关于相关联的装置的信息提供不同类型的反馈(例如,高级反馈或简单反馈)。例如,与不与主装置相关联时相比,当与主装置(诸如集线器装置180)或其他主装置相关联时,远程控制装置116可以在可见指示器119上提供不同的反馈。当与能够将负载控制装置的状态提供给远程控制装置116的集线器装置180相关联时,远程控制装置116可以在可见指示器119上提供高级反馈。当不与集线器装置180相关联时,远程控制装置116可以在可见指示器119上提供简单反馈。
远程控制装置116可以基于远程控制装置116是与集线器装置180相关联还是与另一个主装置(诸如照明装置112a、112b、122中的一个)相关联,以不同的反馈模式经由可见指示器119提供反馈。远程控制装置116可以在与主装置相关联时提供高级反馈,并且在不与主装置相关联时提供简单反馈。当远程控制装置116与主照明装置相关联时,远程控制装置116可以在可见指示器119上提供高级反馈,并且在可见指示器119上显示主照明装置的状态作为反馈。由于主装置可以同步照明装置112a、112b、122的状态,因此远程控制装置116可以提供指示该同步组的照明装置112a、112b、122的强度水平的高级反馈。另外,主装置可以收集和存储该组照明装置112a、112b、122的强度水平,并且如果照明装置不同步,则可以决定显示的水平以用于高级反馈。当远程控制装置116不与主装置相关联时,远程控制装置116可以提供简单反馈,当升高或降低照明装置112a、112b、122的强度时,或者当照明装置112a、112b、122打开或关闭时,该反馈将整个可见指示器119照亮到不同的水平。
尽管远程控制装置116可以与其他控制器装置一起在负载控制系统100中操作,但是其他控制器装置可以不与和远程控制装置116相关联的该组照明装置112a、112b、122相关联。由于其他控制器装置可能不与该组照明装置112a、112b、122相关联,因此其他控制器装置可能不能切换照明装置112a、112b、122的打开/关闭状态。远程控制装置116可以通过向照明装置112a、112b、122查询相关联的装置来确定其他控制器装置是否与照明装置112a、112b、122相关联。每个照明装置112a、112b、122可以用与该装置相关联的装置的唯一标识符来响应。唯一标识符可以指示与照明装置112a、112b、122相关联的装置或装置类型(例如,远程控制装置、占用传感器、日光传感器、网络装置,集线器装置等)。
图2描绘了示例性控制装置200,其可以被部署为负载控制系统100中的远程控制装置116。照明控制系统100可以包括一个或多个电力负载,诸如照明负载102、104。控制装置200可以包括用户接口210(例如,用户输入装置)和面板212。用户接口202可以包括能够相对于面板212旋转的旋转部分214,用于控制由控制装置控制的照明负载的一个或多个特性(例如,调节照明负载的强度和/或颜色)。用户接口210还可以包括具有前表面218的致动部分216,该前表面可以被朝向面板212压入以用于打开和关闭照明负载(例如,切换照明负载)。控制装置200可以包括用于可旋转地支撑旋转部分214的基部部分220。致动部分216可以被接收在由旋转部分214限定的中心开口(例如,圆形开口)中。当致动部分216被致动时,致动部分216可以移动通过旋转部分214的中心开口(例如,沿着垂直于面板的轴线朝向面板212移动)以致动内部开关(未示出)。致动部分216在被致动之后可以返回(例如,沿着垂直于面板的轴线远离面板212移动)到空闲位置(例如,如图2所示)。
控制装置200可以被配置为向照明装置(例如,负载控制系统100的照明装置112a、112b、122)传输一个或多个无线通信信号(例如,图1A和图1B的RF信号106)。控制装置200可以包括无线通信电路(例如,RF收发器或发射器(未示出)),可以经由该无线通信电路发送和/或接收一个或多个无线通信信号。控制装置200可以被配置为经由无线通信信号传输数字消息(例如,包括控制照明装置的命令)。
例如,当致动部分216被致动(例如,朝向面板212压入)时,控制装置200可以被配置为传输包括用于打开和关闭照明装置(例如,切换照明装置)的控制数据的一个或多个无线通信信号。控制装置200可被配置为响应于致动部分216的致动而传输用于切换照明装置(例如,从断开到打开,或反之亦然)的命令。另外,控制装置200可以被配置为响应于致动部分216的致动(例如,如果控制装置200拥有指示照明装置当前关闭的信息)而传输打开照明装置的命令。控制装置200可以被配置为响应于致动部分216的致动(例如,如果控制单元拥有指示照明装置当前打开的信息)而传输关闭照明装置的命令。控制装置200可以被配置为响应于致动部分216的双击(例如,快速连续的两次致动)而传输将照明装置打开至最大功率水平(例如,将照明装置打开至全强度)的命令。
当旋转部分214旋转而致动部分216处于空闲位置时(例如,致动部分216的前表面218在第一平面中),控制装置200可以被配置为响应于旋转部分214的顺时针旋转而传输包括控制数据的一个或多个无线通信信号以升高照明装置的强度,并且响应于旋转部分214的逆时针旋转而传输命令以降低照明装置的强度。另外,当旋转部分214旋转而致动部分216被朝向面板212压入时(例如,致动部分216的前表面218在第二平面中),控制装置200可以被配置为响应于旋转部分214的顺时针旋转和逆时针旋转而传输包括控制数据的一个或多个无线通信信号以调节照明装置的颜色(例如,色温)。
当照明装置打开时,控制装置200可以被配置为响应于旋转部分214的逆时针旋转而将照明装置的功率水平减小到低端强度(例如,最小强度),并且可以仅响应于致动部分216的致动而关闭照明装置。控制装置200还可以被配置为处于旋转至关闭(spin-to-off)模式,其中控制装置200可以在照明装置的功率水平(例如,照明装置的强度)响应于旋转部分214的逆时针旋转而被控制到最小水平(例如,在没有致动部分的致动的情况下)之后关闭照明装置。当照明装置关闭并且旋转部分214顺时针旋转时,控制装置200可以被配置为将照明装置的强度调节到根据旋转部分214旋转多少(例如,旋转部分旋转的角距离)而确定的水平。当照明装置关闭并且旋转部分214逆时针旋转时,控制装置200可以被配置为将照明装置的强度调节到低端强度(例如,与旋转部分214旋转多少无关)。
致动部分216的前表面218可以被配置为被照亮以向控制装置200的用户提供反馈。例如,致动部分216的前表面218可以由一个或多个光源诸如位于控制装置200内部的发光二极管(LED)照亮。当致动部分216和/或旋转部分214中的每一个处于空闲位置时,致动部分216的前表面218可以不被照亮。例如,当致动部分216已经被致动和/或旋转部分214已经被旋转时,致动部分216的前表面218可以被照亮以提供简单反馈。可以照亮致动部分216的前表面218以提供简单反馈,以指示控制装置200已经检测到旋转部分214的旋转和/或致动部分216的致动,并且例如通过向照明装置传输无线信号来响应该致动。在2018年4月26日公开的标题为“CONTROLLING GROUPS OF ELECTRICAL LOADS”的共同转让的美国专利申请公布号2018/0116040中更详细的描述了可以提供简单和高级反馈的控制装置的示例,所述专利申请的全部公开内容通过引用并入本文。
在某些负载控制系统中,可以定位相应的控制装置,使得与该远程控制装置配对的照明装置对于与该控制装置进行交互的用户不可见。因此,用户可能无法感知或理解由控制装置处的用户接口事件引起的改变,这可能导致用户与控制装置低效地交互。例如,即使当照明装置处于最大强度(例如,100%强度)时,用户也可以沿顺时针方向旋转该旋转部分(例如,以升高照明装置的强度)。类似地,即使当照明装置处于最小强度(例如,0%强度)时,用户也可以沿逆时针方向旋转该旋转部分(例如,以降低照明装置的强度)。为了向用户提供照明装置的当前和/或未来强度的指示,控制装置可以被配置为响应于用户接口事件向用户提供反馈(例如,简单反馈和/或高级反馈)。
图3A至图3D示出了提供不同形式反馈(例如,简单反馈)的控制装置200。如图3A至图3C所示,控制装置200可被配置为通过使控制装置200内的光源(例如,LED)通电以点亮致动部分216的前表面218的照亮部分(例如,图3A至图3C所示的相应照亮部分230a-230c)来提供可见指示器。参考图3A至图3D,视觉指示器可以用于提供与控制装置200配对的照明装置的当前和/或未来强度的反馈。例如,图3A所示的前表面218的照亮部分230a可以位于致动部分216的顶部附近。如图3A所示,前表面218的照亮部分230a可以用漫射(例如,模糊)光圈来照亮。例如,响应于致动部分216的致动,照亮部分230a可以用漫射光圈来照亮。另外,图3B中所示的前表面218的照亮部分230b可以位于致动部分216的底部附近。前表面218的照亮部分230b可以用如图3B所示的锐利的光圈照射。此外,图3C中所示的前表面218的照亮部分230c可以位于致动部分216的中心附近,并且可以是光环(例如,不是实心圆)。
前表面218的照亮部分230a-230c可以在首先检测到旋转部分214和/或致动部分216的致动之后被照亮某个时间段(例如,固定时间段),然后在该时间段到期之后不被照亮。例如,前表面218的照亮部分230a-230c可以在该时间段期间被连续地照亮(例如,以单个强度)。图3E示出了在旋转部分214和/或致动部分216致动之后,照亮部分230a-230c的强度相对于时间的示例曲线图。例如,照亮部分230a-230c可以以第一速率快速地渐关到预先确定的强度L
前表面218的照亮部分230a-230c可以用动画(例如,某个时间段内的预先确定的照亮图案)来照亮。例如,动画可以是“心跳”动画。图3F示出了照亮部分230a-230c的强度相对于时间的示例曲线图,以便生成动画。例如,照亮部分230a-230c的强度可以迅速增加到第一强度L
响应于旋转部分214的不同旋转和/或致动部分216的致动,照亮部分230a-230c可以用不同类型的照亮来进行照亮。例如,如果致动部分216被致动以打开或关闭照明负载,则照亮部分230a-230c可以闪烁,并且如果致动部分216被致动以配置控制装置(例如,将控制装置与照明负载相关联),则照亮部分可以频闪。另外,可以根据旋转部分214和致动部分216中的哪个当前被致动或旋转来以不同类型的照亮来照亮该照亮部分230a-230c。
当旋转部分214被旋转以调节照明装置的色温时(例如,在致动部分216被朝向面板212压入并且致动部分216的前表面218在第二平面中时),照亮部分230a-230c可以用不同类型的照亮来进行照亮。例如,当旋转部分214被顺时针旋转以将色温朝冷白色色温T
照亮部分230a-230c可以被照亮以指示照明装置已经达到极限,诸如高端强度。例如,当照明装置已经达到高端亮度时,控制装置200可以被配置为提供极限指示(例如,极限动画,诸如高端动画),诸如使照亮部分230a-230c闪烁或颤动(例如,在某个时间段内快速地打开和关闭许多次)。控制装置200可以被配置为接收例如包括照明装置处于高端强度的指示的消息。控制装置200可以被配置为在控制装置未能接收到照明装置的强度水平的反馈时跟踪和/或估计照明装置的强度。另外,控制装置200可以被配置为响应于旋转部分214的旋转跟踪和/或估计照明装置的强度,并且当照明装置的跟踪强度达到高端强度时提供极限指示。此外,控制装置200可以被配置为例如在没有接收到指示照明装置处于高端强度的任何无线通信信号的情况下,当旋转部分214已经旋转(例如,连续旋转)预先确定的阈值量(例如,大约210°)时,提供照明装置已经达到高端强度的指示。例如,旋转部分214旋转预先确定的阈值量可导致照明装置的强度水平从低端强度改变为高端强度。控制装置200还可以指示照明装置已经达到另一个极限,诸如照明装置的低端强度和/或色温极限。
照亮部分230a-230c可以以不同的方式和/或以不同的颜色照亮以指示不同的状况、旋转部分214的旋转和/或致动部分216的致动。例如,响应于致动部分216的致动,如果控制装置200的电池具有适当的能量,则照亮部分230a-230c可以被照亮为白色(或蓝色),并且可以被照亮为红色以指示低电量状态(例如,以指示电池不具有适当的能量)。另外,与致动部分216的照亮部分230a-230c不同的部分可以被照亮以指示低电量状况。例如,当响应于旋转部分214和/或致动部分216的致动而在致动部分216的顶部处使照亮部分230a照亮时,可以在致动部分216的底部上提供指示以指示低电量状况。在2017年12月7日公布的标题为“USER INTERFACE FOR A CONTROL DEVICE”的共同转让的美国专利申请公布号2017/0354012中更详细地描述了提供低电量状况指示的控制装置,所述专利申请的全部公开内容通过引用并入本文。
另外,控制装置200可以通过从控制装置200的后侧照射光来提供简单反馈。例如,光可以从控制装置200的背面照射出来,以在面板212的前表面242上提供围绕控制装置的旋转部分214的至少一部分或整个周界的照亮区域240,如图3D所示。光可以从控制装置200和基部部分220之间的间隙照射出来。另外,基部部分220可以是至少部分透明或半透明的,以便将从控制装置的后侧发射的光在控制装置200和面板212之间照射到外面。
照射在照亮区域240上的光可以如上所述被控制用于致动部分216的前表面218的照亮部分230a-230c,如图3A至图3C所示(例如,可以连续照亮、闪烁或频闪持续某个时间段,作为动画等)。响应于旋转部分214和/或致动部分216的不同致动,以及/或者取决于旋转部分214和致动部分216中的哪个当前正被致动,可以用不同类型的照亮来照亮该照亮区域240。此外,照亮区域240可以用不同颜色照亮和/或围绕旋转部分214的周界的不同部分可以被照亮以指示旋转部分214和/或致动部分216的不同状况和/或致动。例如,响应于致动部分216的致动,如果控制装置200的电池具有适当的能量,则围绕旋转部分214的整个周界可以被照亮为白色(或蓝色),并且围绕旋转部分214的周界的一部分(例如,靠近旋转部分214的底部)可以被照亮为红色以指示低电量状况(例如,指示电池不具有适当的能量)。
图4描绘了另一种示例性控制装置200′,其可以被部署为负载控制系统100中的远程控制装置116。控制装置200′可以非常类似于图2、图3A至图3D的控制装置200。然而,控制装置200′可以包括可见指示器250(例如,光条或光环),该可见指示器可以被照亮以提供反馈(例如,简单反馈和高级反馈)。可见指示器250可以用于提供与控制装置200′配对的照明装置的当前和/或未来强度的反馈。可见指示器250可以位于控制装置200′的各个位置处,诸如在旋转部分214和致动部分216之间(例如,附接到致动部分216的周边)。可见指示器250可以沿着旋转部分214和/或致动部分216的周界延伸,并且/或者被配置为与致动部分216一起移动(例如,当致动部分被致动时)。可见指示器250可以具有不同的形状和/或其他几何特性。例如,可见指示器250可以形成完整或部分的环,可见指示器250可以是线性的(例如,基本上是线性的),可见指示器250可以具有不规则的形状,诸如不规则的曲线或扭曲和/或类似的形状。如本文所引用的,环可以是圆形或弯曲的,但这不是必须的。完整的环可以形成圆(例如,如图4所示)、椭圆、矩形、三角形、星形、菱形等,并且部分环可以包括上述结构的一个或多个部分。可见指示器250可以由以圆形图案布置在控制装置200′内部的多个光源(例如,LED)照亮。
图5A至图5B示出了控制装置200′在可见指示器250上提供简单反馈的示例。如图5B所示,控制装置200′可以被配置为在控制装置200′已经被激活之后提供反馈。另外,如本文所述,由可见指示器250提供的反馈可以向与控制装置200′进行交互的用户指示与控制装置200′配对的照明装置的当前和/或未来强度。例如,控制装置200′可以被配置为在检测到控制装置附近的用户时和/或在控制装置200′的用户接口上检测到用户接口事件时提供反馈。用户接口事件可以是致动部分216的致动或旋转部分214的旋转。该反馈可以指示响应于该激活,控制装置200′正在传输无线通信信号(例如,RF信号)。控制装置200'可以在触发反馈的事件的持续时间内(例如,在旋转部分214被旋转时)使可见指示器250保持照亮。控制装置200′可以被配置为在事件之后继续照亮可见指示器250持续若干秒(例如,1至2秒),然后关闭可见指示器250,例如,以节省电池寿命。
可见指示器250可以熄灭(例如,如图5A所示),以提供与其相关联的负载控制装置关闭的反馈。当与可见指示器250相关联的负载控制装置打开或检测到用户接口事件时,照亮可见指示器250的LED可以被打开至全强度(例如,如图5B所示)。例如,照明装置可以响应于通过致动致动部分216或旋转旋转部分214而识别的切换事件而被打开。照亮可见指示器250的LED可以被打开至全强度,以反映由控制装置200′控制的照明装置的强度水平。当致动部分216被致动(例如,按压)时,可见指示器250可以在图5A和图5B所示的两种状态之间闪烁,以提供致动部分1104被按压并且控制装置200′正在工作的反馈。
当旋转部分214被旋转时,可见指示器250可以被照亮从而以不同的方式(例如,不同的强度和/或颜色)提供反馈。例如,如图5B所示,当旋转部分214被顺时针或逆时针旋转(例如,增加或减小照明装置的强度)时,可见指示器250可以被完全照亮并保持在最大光条强度L
类似地,可见指示器250可以用不同颜色照亮以指示不同用户输入和/或电力负载或负载控制装置的状态。例如,可见指示器250可以用不同颜色照亮以指示照明负载的强度正在升高或降低、遮光水平正在升高或降低、以及/或者音量水平正在升高或降低。当升高照明强度时,可见指示器250可以用红色照亮,并且当降低照明强度时,可以用蓝色照亮。另外,可见指示器250可响应于致动部分216的致动而被照亮,以指示电力负载正被切换打开或关闭。例如,当照明负载被切换打开或关闭时,可见指示器250可以被照亮以显示动画,以提供致动部分216已经被致动的简单反馈(例如,如图3F所示)。
可见指示器250可以被照亮以指示照明装置已经达到极限,诸如高端强度。例如,控制装置200′可以被配置为当照明装置已经达到高端亮度时,通过使可见指示器250闪烁或颤动(例如,在某个时间段内快速打开和关闭许多次)来提供极限指示(例如,极限动画)。控制装置200′可以被配置为响应于接收到的无线通信信号确定照明装置处于高端强度。另外,控制装置200′可以被配置为响应于旋转部分214的旋转跟踪和/或估计照明装置的强度,并且当照明装置的跟踪强度达到高端强度时提供极限指示。此外,控制装置200′可以被配置为当旋转部分214已经旋转(例如,连续旋转)预先确定的阈值量(例如,大约210°)时,提供照明装置已经达到高端强度的指示。例如,旋转部分214旋转预先确定的阈值量可导致照明装置的强度水平从低端强度改变为高端强度。控制装置200′还可以指示照明装置已经达到另一个极限,诸如照明装置的低端强度和/或色温极限。
可见指示器250可以被照亮以进一步指示提供给照明装置的电力量。控制装置200′可以被配置为照亮可见指示器250的部分以提供高级反馈,例如以指示由控制装置200′控制的照明装置的强度。例如,代替照亮可见指示器250的整个灯条,控制装置200′可以打开光源中的一个或多个光源以照亮可见指示器250的一部分,并且根据用户施加的控制来调节照亮部分的长度。例如,当可见指示器250的灯条被配置为具有圆形形状时,响应于用户接口事件和/或电力负载的状态的调节,照亮部分可以围绕灯条的圆周扩展或收缩。控制装置200′可以调节照亮可见指示器250的照亮部分的终点的LED的强度,以提供对照亮部分的终点的调节,如在此更详细地描述的。
图6A至图6C示出了在可见指示器250上提供高级反馈的示例的控制装置200′。由可见指示器250提供的反馈可以向与控制装置200′进行交互的用户指示与控制装置200′配对的照明装置的当前和/或未来强度。例如,图6A至图6C示出了可见指示器250的照亮部分260在一个方向上扩展和收缩,以提供照明装置的强度的指示(例如,单个指示)。例如,控制装置200′可以包括被配置为照亮可见指示器250的多个光源(例如,LED)。响应于控制装置200的调节照明装置的强度的致动,控制装置200′(例如,控制电路包括在其中)可以照亮光源的子集,使得可见指示器250的照亮部分260被照亮以指示对应于该致动的强度。照亮部分260可以从起点262(例如,在如图6A所示的可见指示器250的底部)开始,并且在终点264(例如,沿着可见指示器250的圆周)处结束。可见指示器250的照亮部分260的长度和/或强度可以指示照明装置的强度。光源的子集可以均匀地照亮到共同的强度。替代地,光源的子集可以被照亮到不同的强度。
控制装置200′的控制电路可以被配置为当照明装置的强度被升高时,增加照亮部分260的长度(例如,使照亮部分的终点264在顺时针方向上移动,如图6A至图6C所示)。控制电路可以被配置为当照明装置的强度降低时,减小照亮部分260的长度(例如,使照亮部分的终点264在逆时针方向上移动,如图6A至图6C所示)。这样,照亮部分260可以随着调节照明装置的强度而扩展和收缩。例如,可见指示器250可以被照亮以指示照明装置的强度大约为30%,如图6A所示,大约为60%,如图6B所示,以及大约为90%,如图6C所示。当照明装置处于高端强度(例如,大约全强度)时,整个可见指示器250可以被照亮。当照明装置已经达到高端强度时,可见指示器250也可以被照亮以提供极限指示。例如,控制装置200′可以被配置为当照明装置已经达到高端强度时使可见指示器250闪烁或颤动(例如,在某个时间段内快速地打开和关闭许多次)。当控制装置200′被配置为控制多个照明装置,并且将所述多个照明负载的相应光强度设置为不同值时,控制装置200′可以被配置为照亮可见指示器250以指示照明装置的相应强度的平均值,指示最靠近控制装置200′的照明装置的强度等。
控制装置200′可以被配置为在接收到打开照明负载的用户输入时指示照明负载的最后已知强度。例如,在照明负载被关闭之前,控制装置200′可以将照明负载的强度存储在控制装置200′的存储器中,同时从终点264到起点262快速减小照亮部分260的长度。随后,当控制装置200′被致动以重新打开照明负载时,控制装置200′可以照亮可见指示器250,以快速增加照亮部分260的长度,以对应于照明负载的先前存储的强度。在2017年12月7日公开的标题为“USER INTERFACE FOR A CONTROL DEVICE”的共同转让的美国专利申请公布号2017/0354011中更详细地描述了具有灯条的控制装置的示例,所述专利申请的全部公开内容通过引用并入本文。
图7A和图7B是示例性远程控制装置310的前分解透视图和后分解透视图,该远程控制装置可以部署为图1A和图1B所示的负载控制系统100中的远程控制装置116、图2所示的控制装置200和/或图4所示的控制装置200′。远程控制装置310可以被配置为安装在标准灯开关312的致动器(例如,单刀单掷保持机械开关的切换致动器)上方。远程控制装置310可以安装在现有面板316的上方,该现有面板(例如,经由面板螺钉318)安装到灯开关312。远程控制装置310可以包括基部部分320和可以可操作地联接到基部部分320的控制单元330。控制单元330可以由基部部分320支撑,并且可以包括能够相对于基部部分320旋转的旋转部分332(例如,环形旋转部)。
如图7A所示,控制单元330可以与基部部分320分离。基部部分320可以附接(例如,固定地附接)到切换致动器314,并且可以被配置为将切换致动器314保持在打开位置。切换致动器314可通过基部部分320中的切换致动器开口322被接收。可以拧紧螺钉324以将基部部分320附接(例如,固定地附接)到切换致动器314。就这一点而言,基部部分320可以被配置为当远程控制装置310附接到灯开关312时防止用户无意地将切换致动器314转换到关闭位置。当控制单元330联接到基部部分320时,旋转部分332能够围绕基部部分320沿相反的方向(例如,沿顺时针方向和/或逆时针方向)旋转。基部部分320可以被配置为安装在开关312的切换致动器314上方,使得旋转部分332的旋转移动可以不改变切换致动器314的操作状态(例如,切换致动器314可以保持在打开位置以维持远程控制装置310的功能)。
控制单元330可以包括致动部分334。致动部分334继而可以包括控制单元330的前表面的一部分或全部。例如,控制单元330可以在由旋转部分332限定的开口内具有圆形表面。致动部分334可包括圆形表面的一部分(例如,圆形表面的中央区域)或大约整个圆形表面。致动部分334可以被接收在由旋转部分332限定的中央圆形开口中。在示例中,致动部分334可以被配置为朝向灯开关312移动(例如,通过旋转部分332的中央开口),以致动控制单元330内部的机械开关(未示出),这将在下面更详细地描述。当致动部分334处于空闲位置时,致动部分334的前表面可以位于第一平面中,该第一平面可以平行于基部部分320的前表面。旋转部分332和/或致动部分334可以被推向基部部分320,以使致动部分334的前表面处于第二平面中,该第二平面平行于面板的前表面并且比第一平面更靠近面板。另外,旋转部分332可连接到致动部分334,并且可与致动部分一起移动,以在致动部分332被致动时致动机械开关。
控制单元330可以从基部部分320释放。例如,控制单元释放突片326可以设置在基部部分320上。通过致动控制单元释放突片326(例如,朝向基部部分向上推动或从基部部分向下牵拉),用户可以将控制单元330从基部部分320移除。控制单元330可以包括一个或多个夹具338,当基部部分320处于锁定位置时,所述一个或多个夹具可以由连接至控制单元释放突片326的相应锁定构件328保持。当控制单元释放突片326被致动(例如,朝向基部部分向上推动或远离基部部分向下牵拉)以将基部部分320置于解锁位置时,一个或多个夹具338可从基部部分320的相应锁定构件328释放。在示例中,锁定构件328可以被弹簧偏置到锁定位置,并且可以在致动并释放控制单元释放突片326之后自动返回到锁定位置。在示例中,锁定构件328可以不是弹簧偏置的,在这种情况下,可以致动控制单元释放突片326以使基部部分320返回到锁定位置。
另外,控制单元330可以安装在基部部分320上,而无需将基部部分320调节到解锁位置。例如,控制单元330的一个或多个夹具338可以被配置为围绕基部部分的相应锁定构件328挠曲并卡扣就位,使得控制单元330被固定地附接到基部部分。
控制单元330可以从基部部分320释放,以通过控制单元330的后侧339(例如,如图7B所示)触及一个或多个电池340。电池340可以至少向远程控制装置310提供电力。电池340可以由电池保持带342保持在适当位置,该电池保持带也可以用作电池的电触点。可以通过松开电池保持螺钉344来松开电池保持带342,以允许电池340被移除和更换。尽管图7B将电池340描绘为位于控制单元330中,但应当理解,电池340可放置在远程控制装置310中的其他地方(例如,在基部部分320中)而不影响远程控制装置310的功能性。
图7C是远程控制装置310的控制单元330的前分解图,并且图7D是后分解图。致动部分334可以被接收在由旋转部分332限定的开口内。旋转部分332可以包括内表面416,该内表面具有围绕旋转部分的圆周的突片418。突片418可以由凹口420分离,这些凹口被配置为接收致动部分334的接合构件422,从而使致动部分334与旋转部分332接合。控制单元330还可包括接收在旋转部分332内的衬套424,使得衬套的上表面426可接触旋转部分内部的突片418的下表面428。当旋转部分334旋转时,致动部分334可与旋转部分一起旋转。致动部分334的接合构件422能够在z方向(例如,朝向基部部分)上移动穿过凹口420,使得致动部分334能够在z方向上移动。
控制单元330还可包括柔性印刷电路板(PCB)430,该柔性印刷电路板可以布置在载体432上。柔性PCB 430可以包括主要部分434,控制单元330的大多数控制电路(例如,包括控制电路)可以安装在该主体部分上。控制单元330可以包括一个或多个光源,诸如安装到柔性PCB 430的前表面靠近柔性PCB的底部的发光二极管(LED)436,以照亮致动部分334的照亮部分(例如,图3B所示的控制装置200的照亮部分230b)。
控制单元330可以包括被配置为安装在LED 436上方的掩模460。掩模460可以包括柔性不透明材料(诸如聚酯薄膜)的折叠件。掩模460可以包括具有孔口462的主要部分462,来自LED 436的光可以通过该孔口照射以在致动部分334上生成照亮部分。掩模460可以包括被配置为搁置和/或附接到柔性PCB 430的支脚466,以及被配置为将主要部分362和孔口464保持在LED 436上方的腿468。掩模460可以有助于在致动部分334上、周围或附近生成锐利的光圈(例如,如图3B所示)。致动部分334可以由白色塑料制成,其可以漫射通过孔口462照射到致动部分的内表面上的光。另外,致动部分334可以由透明塑料制成,其内表面涂有涂料(例如,白色涂料),这可以在致动部分334上提供更锐利的光圈。可以省略掩模460以在致动部分334上生成更漫射的光圈(例如,如图3A所示)。
柔性PCB 430可以包括开关突片438,该开关突片可以(例如,经由柔性臂440)连接到主要部分434。开关突片438可以具有安装在其上的机械触觉开关442。柔性PCB 430的开关突片438可以被配置为搁置在载体432上的开关突片表面444上。载体432可包括接合构件446,该接合构件被配置为接收在衬套424中的凹口448内。环450可以卡扣到旋转部分的下表面452,以将控制单元330保持在一起。夹具338可以附接到载体432,以允许控制单元330连接到基部部分。
当按压致动部分334时,致动部分334可沿z方向移动,直到致动构件的内表面458致动机械触觉开关442。致动部分334可以通过机械触觉开关442返回到空闲位置。另外,控制单元330可以包括附加的复位弹簧,用于使致动部分334返回到空闲位置。在一些示例中,致动部分334的致动可以不引起致动部分移动(例如,致动部分334可以基本上保持其沿z方向的位置)。例如,致动部分334的前表面可以是被配置为检测经由点致动和/或手势的用户输入的触敏表面(例如,电容式触摸表面)。
如图7D所示,电池340可适于接收在载体432中的电池凹槽462内。电池340可以由电池保持带342保持在适当位置,该电池保持带也可以用作电池的负电触点和电池的防擅动紧固件(tamper resistant fastener)。柔性PCB可以包括可以用作电池340的正电触点的接触垫466。电池保持带342可以包括在脚470中终止的腿468,该脚可以电连接到柔性PCB430上的柔性垫472(例如,如图7C所示)。电池保持带342可以通过接收在载体432中的开口476中的电池保持螺钉344保持在适当的位置。当电池保持螺钉344被松开并从开口476移除时,柔性垫472可被配置为移动(例如,弯曲或扭曲)以允许电池保持带342移开电池340的路径,以便允许移除和更换电池。
控制单元330还可包括位于旋转部分332的内表面416上并围绕旋转部分的圆周延伸的磁条480。柔性PCB 430可以包括旋转传感器垫482,在该旋转传感器垫上可以安装旋转传感器(例如,霍尔效应传感器集成电路484)。旋转传感器垫482可以垂直于柔性PCB 430的主要部分434布置,如图7D所示。磁条480可包括多个交替的北(例如,正)极化部段和南(例如,负)极化部段,并且霍尔效应传感器集成电路484可包括两个传感器电路,这两个传感器电路可操作以在旋转部分332旋转时检测磁条的北极化部段和南极化部段的通过。因此,控制单元330的控制电路可以被配置为响应于霍尔效应传感器集成电路484确定旋转部分332的旋转速度和旋转方向。柔性PCB 430还可以包括编程突片486,以允许对控制单元330的控制电路进行编程。
如图7D所示,载体432可以包括致动器开口490,该致动器开口适于在控制单元330安装到基部部分时接收灯开关的切换致动器。载体432可以包括平坦部分492,该平坦部分可以防止灯开关的切换致动器延伸到控制单元330的内部结构中(例如,如果切换致动器特别长)。柔性PCB 430还可包括在天线突片496上的天线494,该天线突片可以抵靠致动器开口490中的平坦部分492放置。
虽然在图7C中未示出,但是控制单元330可以包括围绕柔性PCB430的周界布置的多个LED,例如用于照亮图4至图6C中所示的控制装置200′的可见指示器250。
控制单元330还可以被配置为将光照射到控制单元的后表面339之外并且照射到面板312上。控制单元330可包括安装到柔性PCB430的多个LED(未示出)和用于传导LED生成的光以便从控制单元330的后侧339射出的光导(未示出)。例如,光导可以是圆柱形的,并且可以位于旋转部分332的内表面附近。光导可以被配置为通过控制单元330和基部部分320之间的间隙将光照射出去。例如,控制单元330可以包括安装到柔性PCB 430的后表面的多个后向LED。另外,控制单元330可以包括安装到柔性PCB 430的前侧或后侧并且被配置为在光导上发光的多个侧面发光LED。此外,基部部分320可以是至少部分地透明或半透明的,以便将从控制单元330的后侧339发射的光在控制单元330和面板312之间照射到外面。
图8A是另一个示例性远程控制装置510的前分解透视图,该远程控制装置可以部署为图1A和图1B所示的负载控制系统100中的远程控制装置116、图2所示的控制装置200和/或图4所示的控制装置200′。远程控制装置510可以被配置为安装在标准灯开关512的切换致动器514(例如,单刀单掷保持机械开关的切换致动器)上方。远程控制装置510可以安装在现有面板516的上方,该现有面板(例如,经由面板螺钉518)安装到灯开关512。远程控制装置510可以包括安装组件520(例如,基部部分)和可以可操作地联接到安装组件520的控制单元530。图8B是图8A的远程控制装置510的控制单元530的后透视图。控制单元530可以由安装组件520支撑,并且可以包括旋转部分532(例如,环形旋转部分)和致动部分534。旋转部分532能够相对于安装组件520旋转。
如图8A所示,控制单元530可以与安装组件520分离。安装组件520可以附接(例如,固定地附接)到切换致动器514,并且可以被配置为将切换致动器514保持在打开位置。安装组件520可包括基部521,该基部限定切换致动器开口522,该切换致动器开口延伸穿过基部并且被配置为接收切换致动器514的至少一部分。安装组件520可包括接合机构诸如杆525,该接合机构可被配置为例如当切换致动器514被接收在切换致动器开口522中时接合切换致动器514。杆525可被配置为接合切换致动器514,使得安装组件520相对于切换致动器514固定在适当的位置。杆525可以可操作地联接到基部521,并且可以被配置为相对于基部521可移动,例如可平移。杆525可以被配置为在切换致动器开口522内平移,使得杆525与切换致动器514接合,从而当切换致动器514处于向上位置或向下位置时,将安装组件520相对于灯开关512的切换致动器514固定地附接到适当位置。就这一点而言,安装组件520可以被配置为当远程控制装置510附接到灯开关512时防止用户无意地将切换致动器514转换到关闭位置。
控制单元530可以从安装组件520释放。例如,控制单元释放突片526可以设置在安装组件520上。通过致动控制单元释放突片526(例如,朝向基部部分向上推动或从基部部分向下牵拉),用户可以将控制单元530从安装组件520移除。安装组件520可以包括一个或多个接合特征部,所述一个或多个接合特征部被配置为与控制单元530的互补接合特征部接合。例如,如图所示,安装组件520的基部521可以包括弹性卡扣配合连接器524,并且控制单元530可以限定被配置为接收卡扣配合连接器524的对应凹槽525。安装组件520可以包括释放机构,该释放机构可操作以使控制单元530相对于安装组件520从附接位置释放。如图所示,安装组件520的基部521可以包括释放突片526,该释放突片可以被致动(例如,推动)以从安装组件520释放控制单元530。在操作中,释放突片526可以被朝向基部521向上按压,以允许邻近释放突片526的最下面的卡扣配合连接器524从控制单元530的对应下凹槽525移除,使得控制单元530可以从安装组件520释放。当控制单元530附接到安装组件520时,最上面的卡扣配合连接器524可以首先被定位在控制单元530的对应上凹槽525中。然后,可以将控制单元530的下部部分朝向基部521按压,以允许将下部卡扣配合连接器524接收在控制单元530的下凹槽525中。
控制单元530可以从安装组件520释放,以通过控制单元530的后侧539(例如,如图8B所示)触及一个或多个电池540。电池540可以至少向远程控制装置510提供电力。控制单元530可以包括电池保持带542,该电池保持带可以被配置为将电池540保持在电池保持带542和控制单元530的印刷电路板(PCB)544之间的适当位置。电池保持带542可以被配置为用作电池540的第一电触点。第二电触点可以位于PCB 544的后向表面上。在从控制单元530移除电池540的示例中,控制单元530可以从安装组件520分离,例如如本文所述,并且电池540可以从电池保持带542和PCB 544之间滑出。PCB 544可限定致动器开口546,该致动器开口延伸穿过PCB并且可被配置为当控制单元530安装到安装组件520时接收灯开关512的切换致动器514的至少一部分。
图8C是远程控制装置510的控制单元530的前分解图,并且图8D是后分解图。PCB544可以包括机械触觉开关548,该机械触觉开关可以安装到PCB 544的前向表面。控制单元530的控制电路可以安装到PCB 544,例如安装到前向表面和后向表面中的一者或两者。控制单元530可以包括附接部分552,该附接部分被配置为承载控制单元520的一个或多个部件,诸如PCB 544。例如,如图所示,PCB 544可以经由卡扣配合连接器554附接到附接部分552。附接部分552可以包括围绕附接部分552的圆周布置的多个突片556。突片556可以被配置为被接收在由旋转部分532限定的对应通道558内,从而将旋转部分532联接到附接部分552并且允许旋转部分532围绕附接部分552旋转。如图所示,附接部分552可以限定凹槽525。当控制单元530连接到安装组件520时,安装组件520的卡扣配合连接器524可以被接收在附接部分552的凹槽525中。当旋转部分532围绕附接部分552旋转时,附接部分552和PCB544可以相对于安装组件520保持固定在适当的位置。当控制单元530附接到安装组件520时,灯开关512的切换致动器514的一部分可以接收在PCB 544的致动器开口546中,使得旋转部分532在操作时围绕切换致动器514旋转。
控制单元530可以包括可以位于致动部分534和PCB 544之间的弹性复位弹簧560。复位弹簧560可以被配置为附接到PCB 544。如图35所示,致动部分534可限定从致动部分524的内表面向后延伸的突起部562。当力施加到致动部分534时(例如,当远程控制装置600的用户按压致动部分534时),致动部分534可以在方向Z上移动,直到突起部562致动机械触觉开关548。复位弹簧580可以在力的作用下压缩。当停止施加力时(例如,用户不再按压致动部分534),复位弹簧560可以解除压缩,从而向前偏置致动部分534,使得致动部分534邻接旋转部分532的边缘564。就这一点而言,复位弹簧560可以操作以将致动部分534从激活(例如,按压)位置返回到静止位置。
控制单元530可以包括可以沿着旋转部分532的内表面582设置的磁条580。磁条580可以围绕旋转部分522的内周延伸。控制单元520可以包括可安装在PCB 544上的一个或多个旋转传感器584A、584B。例如,旋转传感器584A、584B可各自包括霍尔效应传感器集成电路。磁条580可以包括多个交替的北极化部段和南极化部段,并且旋转传感器584A、584B可操作以在旋转部分532围绕附接部分552旋转时检测磁条580的北极化部段和南极化部段的通过。控制单元530的控制电路可以被配置为响应于旋转传感器584A、584B来确定旋转部分532的旋转速度和/或旋转方向。
如图所示,控制单元530可包括两对发光二极管(LED),所述两对发光二极管安装到PCB 564的前表面,其中每对LED包括第一颜色(例如,白色或蓝色)的第一LED 586和第二颜色(例如,红色)的第二LED 588。第一对LED 586、588可如图7C所示邻近PCB 564的周界位于控制单元530的顶部附近,并且第二对LED 586、588可邻近PCB 564的周界位于控制单元530的底部附近。控制单元530可被配置为控制LED 586、588以照亮致动部分534的顶部附近的照亮部分(例如,图3A中所示的控制装置200的照亮部分230a)。
控制单元530可被配置为以第一取向(例如,第一垂直取向)和第二取向(例如,第二垂直取向)安装到安装组件530,在第一取向中,灯开关512的切换致动器514处于向上位置(例如,如图8A所示),在第二取向中,切换开关514处于向下位置。控制单元530可以包括取向感测电路(未示出),使得控制单元530可以被配置为确定控制单元的取向。例如,通过使用取向感测电路,控制单元530可以确定其相对于其所安装的空间的取向(例如,基于重力)和/或其相对于另一部件(诸如面板516、灯开关512的切换致动器514等)的取向。例如,控制单元530可以被配置为使用取向感测电路确定控制单元530是以第一取向还是第二取向附接到安装组件520。控制单元530可被配置为根据控制单元530是以第一取向还是第二取向安装,照亮第一LED586中的一个以照亮致动部分534顶部附近的照亮部分(例如,白色或蓝色)。控制单元530可被配置为照亮第二LED 588中的一个以照亮致动部分534的靠近致动部分534的底部的部分(例如,红色)以显示低电量指示。控制单元530可以被配置为根据旋转部分532是否被旋转以调节照明装置的色温,照亮多对LED中的一对LED的两个LED586、588以将致动部分534的顶部附近的照亮部分照亮为不同颜色。例如,当旋转部分532正在顺时针旋转以将色温朝冷白色色温T
虽然在图8C中未示出,但是控制单元520可以包括围绕PCB 564的周界布置的多个LED,例如用于照亮图4至图6C中所示的控制装置200′的可见指示器250。
控制单元530还可以被配置为将光照射到控制单元的后侧539之外并且照射到面板512上。控制单元530可包括安装到柔性PCB 564的多个LED(未示出)和用于传导LED生成的光以便从控制单元530的后侧539射出的光导(未示出)。例如,光导可以是圆柱形的,并且可以位于旋转部分532的内表面附近。光导可以被配置为通过控制单元530和基部部分520之间的间隙将光照射出去。例如,控制单元530可以包括安装到柔性PCB 564的后表面的多个后向LED。另外,控制单元530可以包括安装到柔性PCB 564的前侧或后侧并且被配置为在光导上发光的多个侧面发光LED。此外,安装组件520可以是至少部分地透明或半透明的,以便将从控制单元530的后侧539发射的光在控制单元530和面板512之间照射到外面。
另外,控制单元530可以被配置为以水平取向安装。图8E是以水平取向安装到基座570的控制单元530的透视图。控制单元530可以被安装到基座570,使得控制单元530可以被放置在水平表面诸如桌面上。控制单元570可以被配置为响应于取向感测电路确定其处于水平取向。当控制单元530被安装在水平位置时,控制单元530可以被配置为照亮第一LED586中的一个或另一个。例如,控制单元530可被配置为当控制单元530安装在水平位置时决定照亮第一LED 586中的一个,并且防止随后响应于取向感测电路而调节哪个LED被照亮(例如,防止随后照亮第一LED 586中的另一个)。例如,控制单元530决定在水平位置照亮的第一LED 586中的一个可以是预先确定的(例如,预定义的)和/或可以取决于控制单元530所取向的第一垂直取向或第二垂直取向中的最后一个。另外,控制单元530可以响应于旋转部分532和/或致动部分534的一个或多个致动确定在水平位置照亮第一LED 586中的一个。此外,控制单元530可以响应于数字消息(例如,在经由无线通信电路接收的一个或多个无线通信信号中)确定在水平位置照亮第一LED 586中的一个。控制单元530可以在控制单元保持在水平取向时防止随后响应于取向感测电路而调节哪个LED被照亮。控制单元530可以响应于取向感测电路而恢复调节哪个LED被照亮。
控制单元530可以被配置为以类似的方式决定当控制单元530安装在水平位置时照亮第二LED 588中的哪个。
虽然这里示出和描述的控制装置200、远程控制装置310和远程控制装置510的旋转部分214、332、532和致动部分216、334、534具有圆形形状,但是旋转部分和致动部分可以具有其他形状。例如,旋转部分和致动部分可以是矩形形状、正方形形状、菱形形状、三角形形状、椭圆形形状、星形形状或任何合适的形状。致动部分216、334、534的前表面和/或旋转部分214、332、532的侧表面可以是平面的或非平面的。控制装置200、远程控制装置310和/或远程控制装置510的表面可以由各种颜色、饰面、设计、图案等来表征。
图9是示例性控制装置900(例如,远程控制装置)的简化框图,该控制装置可以被部署为负载控制系统100中的远程控制装置116、控制装置200、远程控制装置310和/或远程控制装置510。控制装置900可以包括控制电路910、一个或多个致动器912(例如,按钮和/或开关)、旋转感测电路914、无线通信电路918、存储器920、电池922、取向检测电路924和/或一个或多个LED 926。存储器920可以被配置为存储控制装置900的一个或多个操作参数(例如,诸如预先配置的颜色场景或预设光强度)。电池922可以向图9所示的部件中的一个或多个提供电力。
一个或多个致动器912可以包括按钮或开关(例如,机械按钮或开关,或其仿造件),诸如与控制装置200的致动部分216、远程控制装置310的致动部分334和/或远程控制装置510的致动部分534相关联地描述的那些按钮或开关。致动器912可以被配置为响应于致动器912的致动(例如,响应于致动器912的移动)向控制电路910发送相应的输入信号。旋转感测电路914可以被配置为将施加到旋转机构(例如,控制装置200的旋转部分214、远程控制装置310的旋转部分332和/或远程控制装置510的旋转部分532)的力转换成输入信号并且将该输入信号提供给控制电路910。旋转感测电路914可包括例如一个或多个磁传感器(诸如霍尔效应传感器(HES)、隧道磁阻(TMR)传感器、各向异性磁阻(AMR)传感器、巨磁阻(GMR)传感器、簧片开关或其他机械磁传感器)、机械编码器、光学编码器和/或电位计(例如,印刷电路板上的聚合物厚膜或其他电阻迹线)。
控制电路910可以被配置为将由致动器912和/或旋转感测电路914提供的输入信号转换成用于控制一个或多个电力负载的控制数据。控制电路910可以使包括控制数据的控制信号(例如,数字消息)经由无线通信电路918传输到电力负载。例如,无线通信电路918可以将包括控制数据的控制信号传输到一个或多个电力负载或传输到相关负载控制系统的中央控制器。控制电路910可以传输控制信号,该控制信号包括用于响应于致动器914中的一个的致动来打开或关闭一个或多个照明负载的控制数据。控制电路910可以传输一个或多个控制信号,所述一个或多个控制信号包括用于响应于由旋转感测电路914确定的旋转机构的旋转来调节一个或多个照明负载的强度的控制数据。控制电路910可以传输一个或多个控制信号,所述一个或多个控制信号包括用于在致动器912中的一个被致动时响应于旋转机构的旋转来调节一个或多个照明负载的颜色(例如,色温)的控制数据。控制数据可以包括用于控制电力负载的命令和/或致动器914和/或旋转机构的致动的指示。
控制电路910可以被配置为响应于取向感测电路924来确定控制装置900的取向。控制装置900可以第一取向(例如,第一垂直取向)和第二取向(例如,第二垂直取向)安装到安装组件(例如,安装组件530),第二取向例如与第一取向成约180°。例如,当切换致动器在第一取向处于向上位置(例如,如图8A所示)时并且当切换致动器在第二取向处于向下位置时,安装组件可以安装在灯开关的切换致动器上方。取向感测电路924可以包括例如加速度计和/或陀螺仪。控制电路910可以被配置为每次控制电路从关闭状态或睡眠状态唤醒时确定取向(例如,控制装置900处于第一取向还是第二取向)。另外,控制电路910可以被配置为响应于取向感测电路924确定控制装置900以水平取向安装。
控制电路910可以照亮一个或多个LED 926以提供关于各种状况的简单反馈。例如,控制电路910可以控制一个或多个LED以照亮致动部分216的前表面218上的照亮部分(例如,照亮部分230a-230c),如图3A至图3C所示,并且/或者将光从控制模块200的后侧照射到面板212上,如图3D所示。响应于致动器912中的一个或多个的致动和/或从旋转感测电路914接收的输入,控制电路910可以控制一个或多个LED 926以提供简单反馈,该简单反馈指示控制电路910当前正在经由无线通信电路918传输无线信号。控制电路910可以被配置为响应于取向感测电路924确定要照亮LED 926中的哪个以提供简单反馈(例如,取决于控制装置900是处于第一取向还是第二取向)。另外,当控制装置900安装在水平取向时,控制电路910可以被配置为确定照亮LED 926中的哪个,然后防止随后响应于取向感测电路924而调节哪个LED被照亮。
与相应控制装置进行交互的用户可能不知道在控制装置和/或负载控制系统内的其他装置处存在的特定状况。例如,用户可能不知道控制装置的状态(例如,控制装置的电池的状态)和/或控制装置被配置为执行的控制的类型(例如,调节强度水平或色温)。另外,用户可能不知道与控制装置进行交互对负载控制系统内的其他装置(例如,与控制装置配对的照明装置)的影响。因此,用户可能无法有效地与控制装置进行交互。为了向用户提供与控制装置有效交互的能力,控制装置可以被配置为响应于用户接口事件向用户提供反馈(例如,简单反馈和/或高级反馈)。图10至图12示出了用于响应于用户接口事件向用户提供反馈的示例性过程。
图10是可以由控制装置的控制电路(例如,控制装置900的控制电路910)执行的示例性控制过程1000的流程图。例如,控制电路可以响应于旋转部分(例如,旋转部分118、214、332和/或532)的旋转在1010处执行控制过程1000。在1012处,控制电路可以(例如,基于取向感测电路924)确定控制装置的取向以确定控制装置是处于第一取向还是第二取向。另外,在1012处,控制电路可以被配置为确定控制装置是否处于水平取向。在1014处,控制装置可以确定控制装置的电池电量是否低。在1014处,如果控制装置的电池电量低,则在1016处,控制电路可以提供低电量状况的指示,其可以向用户指示控制装置的状态,并且控制过程1000可以退出。另外,提供低电量状况的指示。例如,控制电路可以控制一个或多个LED以将致动部分(例如,致动部分117、216、334和/或534)的底部部分照亮为红色。控制电路可以响应于在1012处确定的取向来确定打开LED中的哪个以便照亮致动部分的底部部分。
如果在1014处控制装置的电池电量不低,则在1018处,控制电路可以提供旋转动画。例如,控制电路可以控制LED中的一个或多个以通过照亮致动部分的顶部附近的照亮部分(例如,图3A中所示的照亮部分230a)来提供致动动画。控制电路可以通过打开和关闭LED一次(例如,如图3E所示)或控制LED以生成“心跳”动画(例如,如图3F所示)来提供致动动画。控制电路可以响应于在1012处确定的取向来确定要控制LED中的哪个以便照亮致动部分的顶部附近的照亮部分。
在1020处,控制电路可以传输用于控制至少一个照明装置的控制数据。例如,在1020处,控制电路可以传输包括“移动到水平”命令的一个或多个数字消息,用于响应于旋转部分的旋转而升高和/或降低照明装置的强度。如果在1022处旋转完成,则控制过程1000可以退出。如果在1022处旋转未完成,则在1024处,控制电路可以确定旋转部分是否已经旋转(例如,连续旋转)预先确定的阈值量(例如,大约210°)。如果未旋转预先确定的阈值量,则在1020处,控制电路可以再次(例如,以周期性速率)传输控制数据。如果在1024处旋转部分已被旋转预先确定的阈值量并且在1026处旋转部分的旋转是用于升高照明装置的强度(例如,顺时针旋转),则在1028处,控制电路可以提供高端动画以指示照明装置已达到高端强度,然后控制过程1000退出。例如,旋转部分旋转预先确定的阈值量可导致照明装置的强度水平从低端强度改变为高端强度。在1028处,控制电路可以通过使致动部分的照亮部分闪烁或颤动(例如,在某个时间段内快速打开和关闭许多次)来提供高端动画。
图11是可以由控制装置的控制电路(例如,控制装置900的控制电路910)执行的另一个示例性控制过程1100的流程图。例如,控制电路可以响应于旋转部分(例如,旋转部分118、214、332和/或532)的旋转在1110处执行控制过程1100。在1112处,控制电路可以(例如,基于取向感测电路924)确定控制装置的取向以确定控制装置是处于第一取向还是第二取向。另外,在1112处,控制电路可以被配置为确定控制装置是否处于水平取向。在1114处,如果控制装置的电池电量低,则在1116处,控制电路可以提供低电量状况的指示,并且控制过程1000可以退出。例如,控制电路可以控制一个或多个LED以将致动部分(例如,致动部分117、216、334和/或534)的底部部分照亮为红色。控制电路可以响应于在1112处确定的取向来确定打开LED中的哪个以便照亮致动部分的底部部分。
如果在1114处控制装置的电池电量不低,则在1118处,控制电路可确定在旋转部分正在被旋转时致动部分是否正在被致动。如果在1118处在旋转部分正在被旋转时致动部分未被致动,则在1120处控制电路可以提供照亮指示器,诸如在致动部分顶部附近的照亮部分(例如,图3A中所示的照亮部分230A)。例如,在1120处,控制电路可以控制LED中的一个或多个以将照亮部分照亮为白色。在1118处,如果在旋转部分正在被旋转时致动部分正在被致动,并且在1122处旋转是顺时针旋转(例如,以升高照明装置的色温),则在1124处,控制电路可以冷白色(或蓝色)照亮指示器(例如,致动部分的照亮部分)。在1118处,如果在旋转部分正在被旋转时致动部分正在被致动,并且在1122处旋转是逆时针旋转(例如,以降低照明装置的色温),则在1126处,控制电路可以暖白色(或红色)照亮指示器(例如,致动部分的照亮部分)。
例如,在1120处,控制电路可以控制LED中的一个或多个以将照亮部分照亮为白色。在1118处,如果在旋转部分正在被旋转时致动部分正在被致动,并且在1122处旋转是顺时针旋转(例如,以升高照明装置的色温),则在1124处,控制电路可以第一颜色(例如,冷白色或蓝色)照亮指示器(例如,致动部分的照亮部分)。在1118处,如果在旋转部分正在被旋转时致动部分正在被致动,并且在1122处旋转是逆时针旋转(例如,以降低照明装置的色温),则在1126处,控制电路可以第二颜色(例如,暖白色或红色)照亮指示器(例如,致动部分的照亮部分)。
在1120、1124或1126处照亮指示器之后,在1128处,控制电路可以传输用于控制照明装置的控制数据。例如,如果旋转部分的旋转是为了升高或降低照明装置的强度,则在1128处,控制电路可以响应于旋转部分的旋转传输“移动到水平”命令,以调节照明装置的强度。如果旋转部分的旋转是为了升高或降低照明装置的色温,则在1128处,控制电路可以响应于旋转部分的旋转传输“移动到色温”命令,以调节照明装置的色温。如果在1130处旋转完成,则在1132处,控制电路可以关闭指示器(例如,通过关闭使致动部分的照亮部分照亮的LED),并且控制过程1100可以退出。
如果在1130处旋转未完成,则在1134处,控制电路可确定旋转部分是否已旋转预先确定的阈值量(例如,大约210°)。如果旋转部分已经旋转小于预先确定的阈值量,则在1128处,控制电路可以再次(例如,以周期性速率)传输控制数据。如果在1134处旋转部分已经旋转预先确定的阈值量,在1136处,控制电路可以提供极限指示(例如,极限动画)以指示照明装置已达到极限(例如,高端强度、低端强度、冷白色色温极限和/或暖白色色温极限),然后控制过程1100退出。例如,旋转部分旋转预先确定的阈值量可以导致照明装置的强度水平在低端强度与高端强度之间和/或在冷白色色温极限与暖白色色温极限之间的改变。在1136处,控制电路可以通过使致动部分的照亮部分闪烁或颤动(例如,在某个时间段内快速打开和关闭许多次)来提供极限动画。
图12是可以由控制装置的控制电路(例如,负载控制系统100中的远程控制装置116的控制电路、系统控制器诸如集线器装置180的控制电路、以及/或者控制装置900的控制电路910)执行的另一示例性控制过程1200的流程图。例如,控制电路可以响应于旋转部分(例如,旋转部分118、214、332和/或532)的旋转在1210处执行控制过程1200,并且/或者在1128处执行图11的控制过程1100。另外,控制电路可以响应于接收到指示外部装置的旋转部分的旋转的控制数据而执行控制过程1200(例如,集线器装置180的控制电路可以响应于接收到包括指示远程控制装置116的旋转部分118的旋转的控制数据的数字消息而执行控制过程1200)。在控制过程1200期间,控制电路可以生成和/或传输用于控制至少一个照明装置(例如,照明装置112a、112b、122)的控制数据。
在1212处,控制电路可以确定在旋转部分正在被旋转时致动部分(例如,致动部分117、216、334和/或534)是否正在被致动。如果在1212处在旋转部分正在被旋转时致动部分正在被致动并且在1214处旋转部分正在被顺时针旋转,则在1216处,控制电路可以生成和/或传输用于升高照明装置的色温的控制数据。如果在1212处在旋转部分正在被旋转时致动部分正在被致动并且在1214处旋转部分正在被逆时针旋转,则在1218处,控制电路可以生成和/或传输用于降低照明装置的色温的控制数据。例如,在1216和1218处,控制电路可以将照明装置的色温调节取决于旋转部分的旋转量的量。
在1212处,如果在旋转部分正在被旋转时致动部分未被致动,则在1220处,控制装置可以确定照明装置是否打开。如果在1220处照明负载打开并且在1222处旋转部分正被顺时针旋转,则在1224处,控制电路可以生成和/或传输用于升高照明装置的强度的控制数据。如果在1220处照明负载打开并且在1222处旋转部分正被逆时针旋转,则在1226处,控制电路可以生成和/或传输用于降低照明装置的强度的控制数据。例如,在1224和1226处,控制电路可以将照明装置的强度调节取决于旋转部分的旋转量的量。如果在1220处关闭照明负载并且在1228处旋转部分正被顺时针旋转,则控制电路可以生成和/或传输用于在1230处将照明装置打开到由旋转部分的旋转量确定的强度的控制数据。如果在1220处照明负载关闭并且在1228处旋转部分正被逆时针旋转,则控制电路可以生成和/或传输用于将照明装置打开到低端强度(例如,最小强度)的控制数据。控制电路可以不响应于旋转部分在逆时针方向上的连续旋转而从低端强度调节照明装置的强度。
- 被配置为提供视觉反馈的控制装置
- 利用超声成像提供视觉反馈的肌肉训练方法及系统