一种无人机水下50米大功率供电系留系统
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及一种系留系统,具体为一种无人机水下50米大功率供电系留系统,属于无人机水下50米大功率供电技术领域。
背景技术
水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有:有缆遥控潜水器和无缆遥控潜水器两种,其中有缆遥控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。
系留无人机通过导线连接地面的供电设备,以实现无人机的长时间留空。为了防止供电故障造成无人机失去动力而出现危险,通常在无人机内部设置备用电源。当地面主供电系统出现故障时,切换到备用电源供电,暂时维持无人机的动力。如果地面主电源恢复正常,还需要再重新切换回地面主电源供电。
为了解决上述技术问题,本发明提供如下技术方案。
发明内容
本发明的目的在于提供一种无人机水下50米大功率供电系留系统,为了防止供电故障造成无人机失去动力而出现危险,通常在无人机内部设置备用电源。当地面主供电系统出现故障时,切换到备用电源供电,暂时维持无人机的动力。如果地面主电源恢复正常,重新切换回地面主电源供电。
本发明的目的可以通过以下技术方案实现:
一种无人机水下50米大功率供电系留系统,包括水下无人机本体、控制器、信息采集模块、信息处理模块、电源切换模块、地面供电模块、备用电源模块以及信息存储模块;所述电源切换模块用于控制水下无人机本体进行地面供电与备用电源之间的切换,所述信息采集模块用于采集地面供电模块的参数信息,并将参数信息发送至信息处理模块判断是否进行电源的切换,具体的维持水下无人机本体不间断供电的过程包括以下步骤:
地面供电模块通过导线与导线收放装置连接水下无人机本体;水下无人机开始入水时,导线收放装置通过持续的放松导线维持地面供电模块对水下无人机的持续供电;
所述电源切换模块用于执行地面供电模块与备用电源模块的供电切换,具体的切换过程包括以下:
电源切换模块设定优先级,地面供电模块为第一优先级,备用电源模块为第二优先级;
控制器控制水下无人机下水作业时,采取第一优先级,地面供电模块进行供电,并发送采集指令至信息采集模块对地面供电模块进行信息采集;
当信息处理模块计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制地面供电模块进行供电;
当信息处理模块计算的电压偏差Pc大于预设电压偏差阈值时,信息处理模块发送电压偏差指令至控制器,控制器通过发送切换指令至电源切换模块控制水下无人机进行备用电源模块的供电切换;控制器同时发送采集指令至信息采集模块,进行地面供电模块的二次采集;
当二次采集后计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制切换地面供电模块进行供电。
作为本发明的进一步方案,所述信息处理模块用于对数据采集模块采集的数据进行信息处理,具体的信息处理过程如下:
通过信息采集模块获取地面供电模块一个周期的采样点数,并获取采样点处的采样值,并将一个周期的采样点数,采样点处的采样值发送至信息处理模块;
信息处理模块接收到一个周期的采样点数、采样点处的采样值后,分别将其标记为n、Ui;
利用计算公式计算出电压的实际值Ums;计算公式为
利用计算公式计算出电压偏差Pc;计算公式
当电压偏差Pc大于预设电压偏差阈值时,信息处理模块发送电压偏差指令至控制器,控制器通过发送切换指令至电源切换模块控制水下无人机进行地面供电模块与备用电源模块的供电切换;控制器同时发送采集指令至信息采集模块,进行地面供电模块的二次采集。
作为本发明的进一步方案,所述导线收放装置用于控制导线的收放,具体的收放包括以下:
所述导线收放装置与控制器电性连接,所述导线收放装置内设置有拉力传感器,所述拉力传感器用于检测导线的拉力,控制器设置拉力阈值范围,当拉力传感器检测的导线拉力大于拉力阈值范围时,控制器控制导线收放装置进行导线的放松,当拉力传感器检测的导线拉力小于拉力阈值范围时,控制器控制导线收放装置进行导线的收缩,当拉力传感器检测的导线拉力在拉力阈值范围内时,控制器控制导线收放装置不动作。
作为本发明的进一步方案,所述信息存储模块用于存储拉力传感器检测的导线拉力、信息采集模块采集的地面供电模块一个周期的采样点数、采样点处的采样值以及计算出的电压偏差Pc。
与现有技术相比,本发明的有益效果是:
1、电源切换模块设定优先级,地面供电模块为第一优先级,备用电源模块为第二优先级;控制器控制水下无人机下水作业时,采取第一优先级,地面供电模块进行供电,并发送采集指令至信息采集模块对地面供电模块进行信息采集;当信息处理模块计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制地面供电模块进行供电;当信息处理模块计算的电压偏差Pc大于预设电压偏差阈值时,信息处理模块发送电压偏差指令至控制器,控制器通过发送切换指令至电源切换模块控制水下无人机进行备用电源模块的供电切换;控制器同时发送采集指令至信息采集模块,进行地面供电模块的二次采集;当二次采集后计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制切换地面供电模块进行供电。
2、通过信息采集模块获取地面供电模块一个周期的采样点数,并获取采样点处的采样值,并将一个周期的采样点数,采样点处的采样值发送至信息处理模块;信息处理模块接收到一个周期的采样点数、采样点处的采样值后,分别将其标记为n、Ui;利用计算公式计算出电压的实际值Ums;计算公式为
3、导线收放装置内设置有拉力传感器,拉力传感器用于检测导线的拉力,控制器设置拉力阈值范围,当拉力传感器检测的导线拉力大于拉力阈值范围时,控制器控制导线收放装置进行导线的放松,当拉力传感器检测的导线拉力小于拉力阈值范围时,控制器控制导线收放装置进行导线的收缩,当拉力传感器检测的导线拉力在拉力阈值范围内时,控制器控制导线收放装置不动作。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
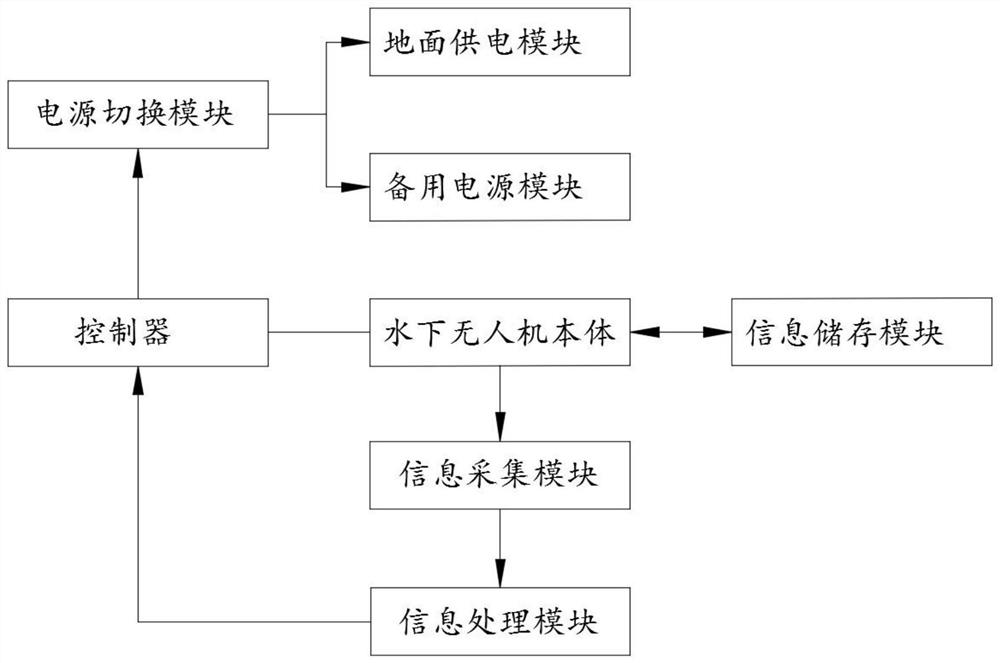
图1为本发明的原理框图。
具体实施方式
下面将结合实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
请参阅图1所示,一种无人机水下50米大功率供电系留系统,包括水下无人机本体、控制器、信息采集模块、信息处理模块、电源切换模块、地面供电模块、备用电源模块以及信息存储模块;所述电源切换模块用于控制水下无人机本体进行地面供电与备用电源之间的切换,所述信息采集模块用于采集地面供电模块的参数信息,并将参数信息发送至信息处理模块判断是否进行电源的切换,具体的维持水下无人机本体不间断供电的过程包括以下步骤:
地面供电模块通过导线与导线收放装置连接水下无人机本体;水下无人机开始入水时,导线收放装置通过持续的放松导线维持地面供电模块对水下无人机的持续供电;
所述电源切换模块用于执行地面供电模块与备用电源模块的供电切换,具体的切换过程包括以下:
电源切换模块设定优先级,地面供电模块为第一优先级,备用电源模块为第二优先级;
控制器控制水下无人机下水作业时,采取第一优先级,地面供电模块进行供电,并发送采集指令至信息采集模块对地面供电模块进行信息采集;
当信息处理模块计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制地面供电模块进行供电;
当信息处理模块计算的电压偏差Pc大于预设电压偏差阈值时,信息处理模块发送电压偏差指令至控制器,控制器通过发送切换指令至电源切换模块控制水下无人机进行备用电源模块的供电切换;控制器同时发送采集指令至信息采集模块,进行地面供电模块的二次采集;
当二次采集后计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制切换地面供电模块进行供电。
其中,所述信息处理模块用于对数据采集模块采集的数据进行信息处理,具体的信息处理过程如下:
通过信息采集模块获取地面供电模块一个周期的采样点数,并获取采样点处的采样值,并将一个周期的采样点数,采样点处的采样值发送至信息处理模块;
信息处理模块接收到一个周期的采样点数、采样点处的采样值后,分别将其标记为n、Ui;
利用计算公式计算出电压的实际值Ums;计算公式为
利用计算公式计算出电压偏差Pc;计算公式
当电压偏差Pc大于预设电压偏差阈值时,信息处理模块发送电压偏差指令至控制器,控制器通过发送切换指令至电源切换模块控制水下无人机进行地面供电模块与备用电源模块的供电切换;控制器同时发送采集指令至信息采集模块,进行地面供电模块的二次采集。
其中,所述导线收放装置用于控制导线的收放,具体的收放包括以下:
所述导线收放装置与控制器电性连接,所述导线收放装置内设置有拉力传感器,所述拉力传感器用于检测导线的拉力,控制器设置拉力阈值范围,当拉力传感器检测的导线拉力大于拉力阈值范围时,控制器控制导线收放装置进行导线的放松,当拉力传感器检测的导线拉力小于拉力阈值范围时,控制器控制导线收放装置进行导线的收缩,当拉力传感器检测的导线拉力在拉力阈值范围内时,控制器控制导线收放装置不动作。
其中,所述信息存储模块用于存储拉力传感器检测的导线拉力、信息采集模块采集的地面供电模块一个周期的采样点数、采样点处的采样值以及计算出的电压偏差Pc。
上述公式均是去量纲取其数值计算,公式是由采集大量数据进行软件模拟得到最近真实情况的一个公式,公式中的预设参数由本领域的技术人员根据实际情况设定。
本发明的工作原理:通过信息采集模块获取地面供电模块一个周期的采样点数,并获取采样点处的采样值,并将一个周期的采样点数,采样点处的采样值发送至信息处理模块;信息处理模块接收到一个周期的采样点数、采样点处的采样值后,分别将其标记为n、Ui;利用计算公式计算出电压的实际值Ums;计算公式为
电源切换模块设定优先级,地面供电模块为第一优先级,备用电源模块为第二优先级;控制器控制水下无人机下水作业时,采取第一优先级,地面供电模块进行供电,并发送采集指令至信息采集模块对地面供电模块进行信息采集;当信息处理模块计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制地面供电模块进行供电;当信息处理模块计算的电压偏差Pc大于预设电压偏差阈值时,信息处理模块发送电压偏差指令至控制器,控制器通过发送切换指令至电源切换模块控制水下无人机进行备用电源模块的供电切换;控制器同时发送采集指令至信息采集模块,进行地面供电模块的二次采集;当二次采集后计算的电压偏差Pc小于等于预设电压偏差阈值时,信息处理模块发送电压正常指令至控制器,控制器控制切换地面供电模块进行供电。
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
- 一种无人机水下50米大功率供电系留系统
- 一种大功率系留无人机的机载供电系统