一种确定禁行区域的方法、装置、机器人及存储介质
文献发布时间:2023-06-19 10:48:02
技术领域
本申请涉及AI领域,尤其涉及一种确定禁行区域的方法、装置、机器人及存储介质。
背景技术
在商场、写字楼、展览馆、机场等公共场所中,为了维持公共场所的秩序,正确引导人员通行,通常通过摆放物理围栏的方式设置禁行区域。但是,对于公共场所中执行作业任务的各类机器人(例如,清洁机器人)而言,其不能准确理解周围的环境信息,从而无法正确、及时的做出反应。
发明内容
为了解决上述至少一个技术问题,本申请提供了以下方案。
第一方面,本申请实施例还提供了一种确定禁行区域的方法,应用于移动机器人,该方法包括:
对获取的传感器数据进行聚类生成至少两个聚类集合;
根据识别模型对所述至少两个聚类集合进行识别处理,生成识别后的聚类集合;
对所述识别后的聚类集合去除误识别,得到可标记的聚类集合;
对所述可标记的聚类集合进行连接,将连接线分割的两部分区域中不存在机器人的部分确定为禁行区域。
可选地,根据识别模型对至少两个聚类集合进行识别处理,生成识别后的聚类集合,包括:
将至少两个聚类集合中每个聚类集合的特征向量输入识别模型进行识别处理,生成识别后的聚类集合。
基于这样的设计方式可以实现对聚类后的聚类集合进行初次识别,以提高聚类集合的参考精度。
可选地,确定识别模型包括:
根据设置的比例从至少两个聚类集合中选取训练的聚类集合;
对所述训练的聚类集合进行归一化处理;
根据所述归一化处理后的聚类集合对目标训练模型进行训练,得到所述识别模型。
通过上述方式可以实现利用聚类集合对目标训练模型进行训练,从而得到优化后的训练模型,也即识别模型。
可选地,对识别后的聚类集合去除误识别,得到可标记的聚类集合,包括:
根据传感器对应的特征向量阈值对识别后的聚类集合去除误识别,得到一次去除误识别的聚类集合;
根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合。
设计两次去除误识别的操作方式,可以有效提高聚类集合的参考精度,从而得到更接近真实环境的禁行区域。
可选地,根据传感器对应的特征向量阈值对识别后的聚类集合去除误识别,得到一次去除误识别的聚类集合,包括:
根据特征向量阈值对识别后的聚类集合中每个聚类集合对应的特征向量进行判断;
若符合对应特征向量阈值的特征向量的数目达到预设数目,则将对应的识别后的聚类集合确定为一次去除误识别的聚类集合。
通过上述技术手段可以对聚类集合进行初次去除误识别。
可选地,根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合,包括:
步骤一:为一次去除误识别的聚类集合分别建立对应的跟踪单元;
其中,跟踪单元具有时间属性和计数属性;
步骤二:确定当前跟踪单元的时间属性是否满足时间条件,若是,则执行步骤三,若不是,则执行步骤五;
步骤三:计算当前跟踪单元与各一次去除误识别的聚类集合之间的距离;
步骤四:根据计算结果确定可标记的聚类集合,并执行步骤二;
步骤五:确定当前跟踪单元失效,重新选取跟踪单元作为当前跟踪单元;
重复执行上述步骤二至步骤五,直至所有跟踪单元均失效,或者,所有一次去除误识别的聚类集合与当前跟踪单元之间的距离均计算完成。
通过上述技术手段可以实现对聚类集合进行二次去除误识别。
可选地,根据计算结果确定可标记的聚类集合,包括:
在计算结果满足距离条件的情况下,更新当前跟踪单元的计数属性;
在更新后的当前跟踪单元的计数属性满足计数条件的情况下,将满足距离条件对应的一次去除误识别的聚类集合确定为可标记的聚类集合。
采用该实施例中的技术手段,可以实现在二次去除误识别的过程中,最终确定可标记的聚类集合。
第二方面,本申请实施例还提供了一种确定禁行区域的装置,该装置包括:
聚类模块,用于对获取的传感器数据进行聚类生成至少两个聚类集合;
识别模块,用于根据识别模型对至少两个聚类集合进行识别处理,生成识别后的聚类集合;
去除误识别模块,用于对识别后的聚类集合去除误识别,得到可标记的聚类集合;
确定模块,用于对所述可标记的聚类集合进行连接,将连接线分割的两部分区域中不存在所述装置的部分确定为禁行区域。
可选地,识别模块,用于将至少两个聚类集合中每个聚类集合的特征向量输入识别模型进行识别处理,生成识别后的聚类集合。
可选地,上述装置还可以包括训练模块;
训练模块,用于根据设置的比例从所述至少两个聚类集合中选取训练的聚类集合;对所述训练的聚类集合进行归一化处理;以及,根据所述归一化处理后的聚类集合对目标训练模型进行训练,得到所述识别模型。
可选地,去除误识别模块,用于根据传感器对应的特征向量阈值对识别后的聚类集合去除误识别,得到一次去除误识别的聚类集合;以及,根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合。
可选地,去除误识别模块,还用于根据特征向量阈值对识别后的聚类集合中每个聚类集合对应的特征向量进行判断;以及,若符合对应特征向量阈值的特征向量的数目达到预设数目,将对应的识别后的聚类集合确定为一次去除误识别的聚类集合。
可选地,去除误识别模块,还用于执行以下过程:
步骤一:为一次去除误识别的聚类集合分别建立对应的跟踪单元;
其中,跟踪单元具有时间属性和计数属性;
步骤二:确定当前跟踪单元的时间属性是否满足时间条件,若是,则执行步骤三,若不是,则执行步骤五;
步骤三:计算当前跟踪单元与各一次去除误识别的聚类集合之间的距离;
步骤四:根据计算结果确定可标记的聚类集合,并执行步骤二;
步骤五:确定当前跟踪单元失效,重新选取跟踪单元作为当前跟踪单元;
重复执行上述步骤二至步骤五,直至所有跟踪单元均失效,或者,所有一次去除误识别的聚类集合与当前跟踪单元之间的距离均计算完成。
可选地,去除误识别模块,还用于在计算结果满足距离条件的情况下,更新当前跟踪单元的计数属性;以及,在更新后的当前跟踪单元的计数属性满足计数条件的情况下,将满足距离条件对应的一次去除误识别的聚类集合确定为可标记的聚类集合。
第三方面,本申请实施例还提供了一种机器人,该机器人包括存储器、控制器及存储在存储器上并可在控制器上运行的计算机程序,所述控制器执行所述计算机程序时,实现如本申请实施例所提供的确定禁行区域的方法。
第四方面,本申请实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,在计算机程序被处理器执行时,实现如本申请实施例提供的确定禁行区域的方法。
本申请实施例提供一种确定禁行区域的方法、装置、机器人机及存储介质,其中,该方法包括对获取的传感器数据进行聚类生成至少两个聚类集合;根据识别模型对至少两个聚类集合进行识别处理,生成识别后的聚类集合;对识别后的聚类集合去除误识别,得到可标记的聚类集合;对所述可标记的聚类集合进行连接,将连接线分割的两部分区域中不存在所述机器人的部分确定为禁行区域。通过这样的方式可以确定机器人的禁行区域,使机器人对当前的环境有更清楚的认识。
附图说明
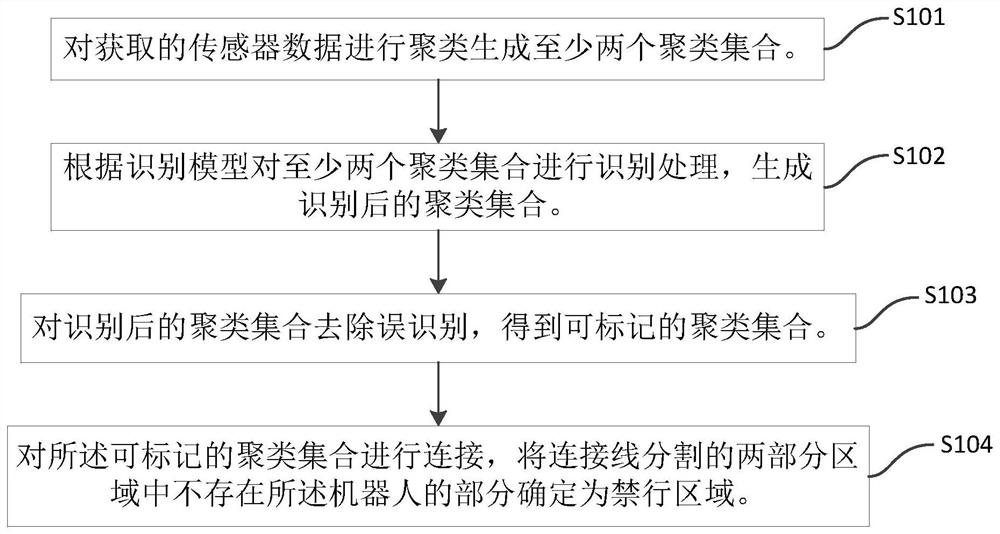
图1为本申请实施例中的一种确定禁行区域的方法的流程图;
图2为本申请实施例中的根据分割线确定禁行区域的示意图;
图3为本申请实施例中的根据分割线确定禁行区域的示意图;
图4为本申请实施例中的反光膜设置方式的示意图;
图5为本申请实施例中的反光膜设置方式的示意图;
图6为本申请实施例中的确定识别模型的方法流程图;
图7为本申请实施例中的根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合的方法流程图;
图8是本申请实施例中的一种确定禁行区域的装置的结构示意图;
图9是本申请实施例中的机器人的结构示意图。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本申请,而非对本申请的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本申请相关的部分而非全部结构。
另外,在本申请实施例中,“可选地”或者“示例性地”等词用于表示作例子、例证或说明。本申请实施例中被描述为“可选地”或者“示例性地”的任何实施例或设计方案不应被解释为比其它实施例或设计方案更优选或更具优势。确切而言,使用“可选地”或者“示例性地”等词旨在以具体方式呈现相关概念。
为了便于更加清楚的理解本申请所提供的实施例,在此对比本申请实施例中所涉及到的相关概念进行解释,具体如下:
欧式聚类:一种基于欧式距离度量的聚类算法。其中,基于KD-Tree算法的近邻查询算法是加速欧式聚类算法的重要预处理方法。欧式聚类的距离判断准则为欧氏距离。例如,对于空间某点P,通过KD-Tree近邻搜索算法找到k个离p点最近的点,这些点中距离小于设定阈值的便聚类到集合Q中。如果Q中元素的数目不再增加,整个聚类过程便结束;否则须在集合Q中选取p点以外的点,重复上述过程,直到Q中元素的数目不再增加为止。
支持向量机(Support Vector Machine,SVM),主要用于解决模式识别领域中的数据分类问题,属于有监督学习算法的一种。SVM是一类按监督学习(supervised learning)方式对数据进行二元分类的广义线性分类器(generalized linear classifier),其决策边界是对学习样本求解的最大边距超平面(maximum-margin hyperplane)。SVM使用铰链损失函数(hinge loss)计算经验风险(empirical risk)并在求解系统中加入了正则化项以优化结构风险(structural risk),是一个具有稀疏性和稳健性的分类器。SVM可以通过核方法(kernel method)进行非线性分类,是常见的核学习(kernel learning)方法之一。
基于上述概念,本申请实施例提供了一种确定禁行区域的方法,该方法可以由自主定位导航的移动机器人执行,如图1所示,该方法可以包括但不限于以下步骤:
S101、对获取的传感器数据进行聚类生成至少两个聚类集合。
本步骤中的传感器可以为搭载在机器人上的传感器,例如,可以为机器人配置激光雷达传感器,机器人在移动过程中,激光雷达传感器发射的激光信号投射在物理围栏等遮挡物上时,可以从遮挡物上反射回信号,激光雷达传感器根据从遮挡物上反射回的信号获取激光点云数据,即一种传感器数据;或者,机器人在移动探测的过程中,配置虚拟雷达传感器,可以通过视觉转换的方式获取上述传感器数据,例如,通过提取投射在物理围栏上视觉帧中的像素点,并将像素点转换为点云数据,从而获取本步骤中的传感器数据。
示例性地,在本申请实施例中,可以通过欧式聚类的方式对获取的数据进行聚类,从而生成至少两个聚类集合。例如,可以设置欧式聚类的集合的最小点数与最大点数(比如,最小点数为5,最大点数为35),并设置近邻点的最大距离(比如,近邻搜索半径为10cm),采用KD-Tree算法实现各近邻点的距离搜索,从而输出聚类集合C。假设
需要说明的是,上述参数数值的设置可以根据物理围栏大小等参考因素进行调整。
S102、根据识别模型对至少两个聚类集合进行识别处理,生成识别后的聚类集合。
示例性地,本步骤中的识别模型可以选用SVM模型。本步骤的实现方式可以为,将至少两个聚类集合中每个聚类集合的特征向量输入识别模型中进行识别处理,以得到识别后的聚类集合。
需要说明的是,上述步骤中的识别模型可以为训练好的模型。
S103、对识别后的聚类集合去除误识别,得到可标记的聚类集合。
可选地,为提高对聚类集合的识别精度,本申请实施例通过本步骤设计了去除误识别操作。示例性地,可以通过一次或多次去除误识别操作提高聚类集合的聚类精度,例如,本申请实施例通过两次去除误识别操作,得到可标记的聚类集合。示例性地,本步骤中的两次去除误识别操作可以分别为,根据传感器对应的特征向量阈值对识别后的聚类集合去除误识别,得到一次去除误识别的聚类集合;根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合。
S104、对可标记的聚类集合进行连接,将连接线分割的两部分区域中不存在所述机器人的部分确定为禁行区域。
可选地,在本申请实施例中,可以在机器人内部事先存储行驶区域的全局地图,基于步骤S103得到可标记的聚类集合后,可以在全局地图上标记这些可标记的聚类集合,并连接标记的可标记聚类集合,进而将各可标记聚类集合之间的连接线分割的两部分区域中不存在上述机器人的部分确定为禁行区域。
如图2所示,假设方框所圈的部分为当前环境,图2中黑色小圆点为移动机器人,点划线所表示的连接线为各可标记的聚类集合连接后形成的连接线。点划线将当前环境分割为两部分,分别为A区域和B区域,若机器人(或小黑点)位于A区域,那么上述将连接线分割的两部分区域中不存在机器人的部分确定为禁行区域可以理解为将B区域确认为禁行区域,即机器人确定点划线分割出的B区域为禁行区域,其仅在A区域移动。
如图3所示,若机器人位于B区域,那么将连接线分割的两部分区域中不存在机器人的部分确定为禁行区域可以理解为将A区域确定为禁行区域,即机器人将点划线分割出的A区域确定为禁行区域,仅在B区域范围内移动。
本申请实施例提供了一种确定禁行区域的方法,该方法可以包括:对获取的传感器数据进行聚类生成至少两个聚类集合;根据识别模型对至少两个聚类集合进行识别处理,生成识别后的聚类集合;对识别后的聚类集合去除误识别,得到可标记的聚类集合;对所述可标记的聚类集合进行连接,将连接线分割的两部分区域中不存在所述机器人的部分确定为禁行区域。通过这样的方式可以确定机器人的禁行区域,使机器人对当前的环境有更清楚的认识。
在本申请实施例中,上述过程中所涉及到的物理围栏的形状可以包括圆柱形、锥形、六面体或八面体中的任意一种。该物理围栏上可以设置有反光膜,例如,可以在物理围栏上设置蜂窝式反光膜。可选地,该反光膜的设置方式可以包括全部设置反光条,或者以反光条与低反材质交替的方式设置。
其中,全部设置反光条可以呈现高反射强度的效果,反光条与低反材质交替设置的方式可以形成高反—低反或者低反—高反的反射效果。如图4所示,为反射效果呈低反—高反—低反的反光膜设置方式,如图5所示,为反射效果呈高反—低反—高反的反光膜设置方式,图5中示例性地提供了反光条的尺寸设计,但对反光条的具体尺寸不作限定。
可选地,在设置上述物理围栏时,可以设置物理围栏两两之间的距离小于移动机器人对物理围栏有效识别的设定值(例如,5m)。当然,可以根据不同场景下的不同需求自适应地设置相应的间隔距离,机器人在不同场景下执行作业时识别出上述物理围栏,即可确定出物理围栏所圈定的禁行区域。可以理解的是,设置的物理围栏之间的间隔距离越小,移动机器人对摆放物理围栏设置的禁行区域的识别效果越好,越能对周围的环境有更加清楚的认识,从而提高移动机器人自主作业的安全性。
示例性地,上述物理围栏可以设置于如下场景中,即移动机器人可以在如下场景中通过识别物理围栏确定禁行区域,例如:
跌落场景:比如扶梯、台阶等场景。物理围栏设置在扶梯口、台阶处以形成虚拟墙壁,移动机器人自动作业时可识别物理围栏形成的虚拟墙,从而确定禁行区域。
施工区域:通过摆放物理围栏的方式将施工区域包围,以隔离出禁行区域,机器自动作业时可通过物理围栏识别确定出禁行区域。
道路灾害:在地面有电线、凹坑、悬挂物、低矮路沿、窄道的场景下,将物理围栏放置在道路灾害周围,机器自动作业时可识别出物理围栏圈定的禁行区域。
玻璃墙壁:沿玻璃墙壁摆放物理围栏,机器自动作业时可识别物理围栏形成的虚拟墙,从而确定出禁行区域。
固定区域:例如,晶面机结晶任务等场景下,在移动机器人作业周围放置物理围栏,机器人通过设置的物理围栏即可确定出禁行区域。
如图6所示,在一种示例中,确定上述步骤S102中训练好的识别模型的实现方式可以包括但不限于以下步骤:
S601、根据设置的比例从至少两个聚类集合中选取训练的聚类集合。
示例性地,可以按照2:8的比例从聚类后的至少两个聚类集合中选出20%的聚类集合作为训练的聚类集合。
当然,本领域技术人员也可以根据实际需要调整比例设置,选取相应数量的聚类集合作为训练的聚类集合,本申请实施例对此不作限定。
S602、对训练的聚类集合进行归一化处理。
S603、根据归一化处理后的聚类集合对目标训练模型进行训练,得到识别模型。
基于上述步骤S602对训练的聚类集合进行归一化处理后,可以根据处理后的聚类集合对目标训练模型进行训练。
可以理解的是,这里的目标训练模型与识别模型的网络结构相同,只是通过归一化处理后的聚类集合对目标训练模型进行训练后,实现将目标训练模型中各参数进行优化,从而将优化或训练后的目标训练模型作为识别模型。
在一种示例中,上述步骤S103中,根据传感器对应的特征向量阈值对识别后的聚类集合去除误识别,得到一次去除误识别的聚类集合的实现方式可以包括,根据特征向量阈值对识别后的聚类集合中每个聚类集合对应的特征向量进行判断,若符合对应特征向量阈值的特征向量的数目达到预设数目,则将对应的识别后的聚类集合确定为一次去除误识别的聚类集合。
例如,假设每个聚类集合C
f1—聚类集合C
f2—激光传感器与每个聚类集合C
其中,p
f3—每个聚类集合C
f4—聚类集合C
f5—聚类集合C
f6—聚类集合C
f7—聚类集合C
f8—聚类集合C
f9—聚类集合C
当然,本领域技术人员也可以根据自己的实际需求或不同传感器的型号设计其他不同维度的特征向量,本申请实施例对此不作限定。
需要说明的是,对于不同型号的激光雷达传感器,每一维特征向量可以设置不同的阈值以去除误识别。例如,对于sick561激光雷达传感器,其特征向量阈值设置可以参考表1所示。
表1
表1中上述三行数值分别表示不同的划分范围相对应的数值。例如,假设本申请实施例中,设置的预设数目为8,那么若某个聚类集合的特征向量f1-f8均满足上述表1中对应的特征向量阈值,则该聚类集合即为一次去除误识别的聚类集合。
可以理解的是,若上述设置的预设数目较小,则表示对聚类集合中需要满足特征向量阈值的特征向量设置的判断条件较宽泛,相应地,对聚类集合进行一次去除误识别的精度较低。相反,若设置的预设数目较大,例如,该数目为聚类集合中特征向量的数目,则表示需要对聚类集合中所有的特征向量都与各特征向量对应的阈值进行判断,并在所有特征向量都满足特征向量阈值的情况下,将该聚类集合确定为一次去除误识别的聚类集合,这样可以提高一次去除误识别的精度。因此,本领域技术人员可以根据对一次去除误识别的精度要求设置上述预设数目。
如图7所示,在一种示例中,上述步骤S103中,根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合的实现方式可以包括但不限于以下步骤:
S701、为一次去除误识别的聚类集合分别建立对应的跟踪单元。
例如,假设一次去除误识别的聚类集合为C
可选地,该跟踪单元t
S702、确定当前跟踪单元的时间属性是否满足时间条件,若是,则执行步骤S703,若不是,则执行步骤S705。
示例性地,假设时间条件为小于30s,那么本步骤即可理解为判断当前跟踪单元的时间属性是否小于30s。该时间值也可以理解为当前跟踪单元的存活时间。
S703、计算当前跟踪单元与各一次去除误识别的聚类集合之间的距离。
若当前跟踪单元t
其中,distance为跟踪单元t
S704、根据计算结果确定可标记的聚类集合,并执行步骤S702。
若基于上述公式(3)计算得到的当前跟踪单元t
S705、确定当前跟踪单元失效,重新选取跟踪单元作为当前跟踪单元。
即在当前跟踪单元的时间属性不满足时间条件的情况下,确定当前跟踪单元失效,将当前跟踪单元从集合T中剔除,并重新选取跟踪单元执行上述过程,直至所有的跟踪单元均失效,或者所有的一次去除误识别的聚类集合与跟踪单元之间的距离均计算完成。
上述实现方式可以理解为对每个跟踪单元设置一定的存活时间,若其时间属性不满足时间条件,那么将其剔除;相反,若其时间属性满足时间条件,则在计算其与各一次去除误识别的聚类集合之间的距离时,以计数的方式更新其计数属性,若与该跟踪单元之间的距离满足距离条件的一次去除误识别的聚类集合的数量达到计数条件,可以将这些一次去除误识别的聚类集合确定可标记的聚类集合。
可以理解的是,若该跟踪单元的存活时间到,也可以将该跟踪单元判定为失效,并从集合T中剔除,并重新选取新的跟踪单元重复执行上述过程,以继续确定可标记的聚类集合。
图8为本申请实施例提供的一种确定禁行区域的装置,如图8所示,该装置可以包括:聚类模块801、识别模块802、去除误识别模块803、确定模块804;
聚类模块,用于对获取的传感器数据进行聚类生成至少两个聚类集合;
识别模块,用于根据识别模型对至少两个聚类集合进行识别处理,生成识别后的聚类集合;
去除误识别模块,用于对识别后的聚类集合去除误识别,得到可标记的聚类集合;
确定模块,用于对所述可标记的聚类集合进行连接,将连接线分割的两部分区域中不存在所述机器人的部分确定为禁行区域。
在一种示例中,识别模块,用于将至少两个聚类集合中每个聚类集合的特征向量输入识别模型进行识别处理,生成识别后的聚类集合。
在一种示例中,上述装置还可以包括训练模块;
该训练模块可以根据设置的比例从所述至少两个聚类集合中选取训练的聚类集合;对所述训练的聚类集合进行归一化处理;以及,根据所述归一化处理后的聚类集合对目标训练模型进行训练,得到所述识别模型。
去除误识别模块,用于根据特征向量阈值对识别后的聚类集合去除误识别,得到一次去除误识别的聚类集合;以及,根据距离判断方式对一次去除误识别的聚类集合去除误识别,得到可标记的聚类集合。
在一种示例中,上述去除误识别模块,可以用于根据特征向量阈值对识别后的聚类集合中每个聚类集合对应的特征向量进行判断;若符合对应特征向量阈值的特征向量的数目达到预设数目,则将对应的识别后的聚类集合确定为一次去除误识别的聚类集合。
在一种示例中,上述去除误识别模块,还可以用于执行以下过程:
步骤一:为一次去除误识别的聚类集合分别建立对应的跟踪单元;
其中,跟踪单元具有时间属性和计数属性;
步骤二:确定当前跟踪单元的时间属性是否满足时间条件,若是,则执行步骤三,若不是,则执行步骤五;
步骤三:计算当前跟踪单元与各一次去除误识别的聚类集合之间的距离;
步骤四:根据计算结果确定可标记的聚类集合,并执行步骤二;
步骤五:确定当前跟踪单元失效,重新选取跟踪单元作为当前跟踪单元;
重复执行上述步骤二至步骤五,直至所有跟踪单元均失效,或者,所有一次去除误识别的聚类集合与当前跟踪单元之间的距离均计算完成。
在一种示例中,上述去除误识别模块,还可以用于在计算结果满足距离条件的情况下,更新当前跟踪单元的计数属性;在更新后的当前跟踪单元的计数属性满足计数条件的情况下,将满足距离条件对应的一次去除误识别的聚类集合确定为可标记的聚类集合。
上述确定禁行区域的装置可以执行图1、图2所提供的确定禁行区域的方法,具备该方法中相应的器件和有益效果。
图9为本发明实施例9提供的一种机器人的结构示意图,如图9所示,该机器人包括控制器901、存储器902、输入装置903、输出装置909;机器人中控制器901的数量可以是一个或多个,图9中以一个控制器901为例;机器人中的控制器901、存储器902、输入装置903和输出装置909可以通过总线或其他方式连接,图9中以通过总线连接为例。
存储器902作为一种计算机可读存储介质,可用于存储软件程序、计算机可执行程序以及模块,如图1实施例中的确定禁行区域的方法对应的程序指令/模块(例如,确定禁行区域装置中的聚类模块801、识别模块802、去除误识别模块803、确定模块804)。控制器901通过运行存储在存储器902中的软件程序、指令以及模块,从而执行机器人的各种功能应用以及数据处理,即实现上述的确定禁行区域的方法。
存储器902可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序;存储数据区可存储根据终端的使用所创建的数据等。此外,存储器902可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实例中,存储器902可进一步包括相对于控制器901远程设置的存储器,这些远程存储器可以通过网络连接至终端/服务器。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
输入装置903可用于接收输入的数字或字符信息,以及产生与机器人的用户设置以及功能控制有关的键信号输入。输出装置909可包括显示屏等显示装置。
本申请实施例还提供一种包含计算机可执行指令的存储介质,该计算机可执行指令在由计算机控制器执行时用于执行一种确定禁行区域的方法,该方法包括图1所示的步骤。
通过以上关于实施方式的描述,所属领域的技术人员可以清楚地了解到,本申请可借助软件及必需的通用硬件来实现,当然也可以通过硬件实现,但很多情况下前者是更佳的实施方式。基于这样的理解,本申请的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在计算机可读存储介质中,如计算机的软盘、只读存储器(Read-Only Memory,ROM)、随机存取存储器(RandomAccess Memory,RAM)、闪存(FLASH)、硬盘或光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)实现本申请各个实施例所述的方法或功能。
注意,上述仅为本申请的较佳实施例及所运用技术原理。本领域技术人员会理解,本申请不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本申请的保护范围。因此,虽然通过以上实施例对本申请进行了较为详细的说明,但是本申请不仅仅限于以上实施例,在不脱离本申请构思的情况下,还可以包括更多其他等效实施例,而本申请的范围由所附的权利要求范围决定。
- 一种确定禁行区域的方法、装置、机器人及存储介质
- 一种膨胀区域的确定方法、确定装置、机器人和存储介质