一种基于ORB特征的轨道铺设滚筒的识别方法与系统
文献发布时间:2023-06-19 10:48:02
技术领域
本发明涉及图像识别领域,具体涉及一种基于ORB特征的轨道铺设滚筒的识别方法与系统。
背景技术
随着经济发展,铁路以其运输范围广、经济效益高、占地面积小等发展势头与日俱进。在过去的铁路发展中,有砟轨道占领了轨道建设的主导地位,随着技术的更新发展,轨道承载列车速度的上限逐步拔高,有砟轨道因其对速度的限制而较常用于低速轨道,因此铁路建设迎来了无砟轨道时代。但无砟轨道建设成本高,相应的维修成本低、维护周期长、寿命长,适用于速度快、发车频繁高的客运线路。因而国内高速轨道大部分采用无砟轨道。铁路建设也在不断推进中。
无砟轨道铺轨分为几个步骤。首先进行施工准备,落实施工所需材料、机械并检查施工设备的状态。轨道车进行装车与运输,每隔几个枕木,放置铺轨辅助工件——滚筒。滚筒的放置需要对准轨道,且与轨道中位线的偏差需要在允许范围内。而后轨道车将轨道放置于滚筒之上,完成放置后抬高轨道,取出滚筒,使用扣件扣紧轨道,后续进行施工要求检测,完成铺轨。
在轨道铺设中,滚筒的放置需要定位,放置在误差允许范围内。这项工作加之后续滚筒的回收,重复性高、劳动强度大、人力要求高且使用人力进行所需时间长。随着智能化和自动化的不断普及,无砟轨道铺轨引用自动化设备、实现自动化铺轨为大势所趋。因而采用机械视觉对滚动定位,进行抓取放置与回收的研究,具有很强的实际意义。
发明内容
为使得滚筒回收车辆能够快速准确的识别滚筒,本发明提出了一种基于ORB特征的轨道铺设滚筒的识别方法,其特征在于,包括步骤:
S1:固定线激光器于车辆底部,并获取线激光器扫描校准平面的距离扫描数据;
S2:判断距离扫描数据的误差是否在预设范围内,若是,进入下一步骤,若否,校准线激光器的水平角度并返回步骤S1;
S3:接收线激光器扫描待测目标的激光扫描数据的集合;
S4:采用FAST角点提取算法对激光扫描数据的集合进行角点特征提取,并获得待测目标的角点集;
S5:通过BRIEF算子对已检测到的角点集进行表示和描述,得到滚筒的特征描述子;
S6:通过汉明距离将特征描述子与预置滚筒特征模型进行特征匹配,并获得匹配结果;
S7:根据匹配结果判断待测目标是否为滚筒,若是,进入下一步骤,若否,返回步骤S3;
S8:整合角点集中的对称角点,并判断对称角点的数据差是否在预设阈值内,若是,进入下一步骤,若否,删除该对称角点组;
S9:对角点集进行加权平均获得形心坐标,并根据形心坐标抓取滚筒。
进一步地,所述步骤S3之后还包括步骤:
S31:通过中通滤波法对激光扫描数据进行滤波。
进一步地,步骤S5中,所述BRIEF算子为一种以特征点为中心,在预设窗口内随机选取N对随机数据点,对各对随机数据点根据高度信息进行二进制赋值,并最终形成二进制编码,其公式为:
式中,τ(p;x,y)为特征点的二进制值,p(x)为随机点x=(u1,v1)的高度值,p(y)为随机点y=(u2,v2)的高度值。
进一步地,步骤S6中,所述预置滚筒特征模型为采用harris角点检测算法对标准滚筒模型进行角点特征提取。
进一步地,步骤S8中,所述对称角点包括水平方向以及竖直方向两个方向上的对称角点。
本发明还提出了一种基于ORB特征的轨道铺设滚筒的识别系统,包括固定平台、水平仪、线激光器、上位机和机械手,其中:
固定平台用于将线激光器固定于车辆底部;
水平仪用于校准线激光器的安装水平度;
线激光器用于扫描待测目标或校准平面,分别获得激光扫描数据的集合或距离扫描数据;
上位机用于根据距离扫描数据判断其误差是否在预设范围内,若否,调整线激光器的水平角度;
上位机还用于利用FAST角点提取算法对激光扫描数据的集合进行角点特征提取,并获得待测目标的角点集;
上位机还用于通过BRIEF算子对已检测到的角点集进行表示和描述,得到滚筒的特征描述子,并通过汉明距离将特征描述子与预置滚筒特征模型进行特征匹配,并获得匹配结果;在判断待测目标为滚筒时对数据差符合预设阈值的对称角点进行加权平均并获得形心坐标,根据形心坐标控制机械手抓取滚筒。
进一步地,所述上位机中还包括预处理单元,用于通过中通滤波法对激光扫描数据进行滤波。
进一步地,所述BRIEF算子为一种以特征点为中心,在预设窗口内随机选取N对随机数据点,对各对随机数据点根据高度信息进行二进制赋值,并最终形成二进制编码,其公式为:
式中,τ(p;x,y)为特征点的二进制值,p(x)为随机点x=(u1,v1)的高度值,p(y)为随机点y=(u2,v2)的高度值。
进一步地,所述上位机中还包括模板生成单元,用于采用harris角点检测算法对标准滚筒模型进行角点特征提取并生成预置滚筒特征模型。
进一步地,所述对称角点包括水平方向以及竖直方向两个方向上的对称角点。
与现有技术相比,本发明至少含有以下有益效果:
(1)本发明所述的一种基于ORB特征的轨道铺设滚筒的识别方法与系统,通过对线激光器水平角度的校准,使得激光扫描数据稳定性高、一致性强,同时,因为安装位置固定,可以通过ORB算法进行特征匹配;
(2)考虑到滚筒各角点对称性的特点,在通过FAST子进行特征点(角点)提取、BRIEF描述子对特征进行描述后,通过角点对称性的判断筛选角点信息,从而使得识别结果更加准确、迅速,同时采用FAST算法提取、BRIEF描述子进行描述,使得特征点提取更加稳定;
(3)通过一系列的算法计算智能化的对滚筒进行识别,将滚筒的放置误差维持在允许范围内,避免施工人员工作的重复性、高强度,提高了施工效率;
(4)自动化施工,不受环境与天气影响,缩减了施工周期。
附图说明
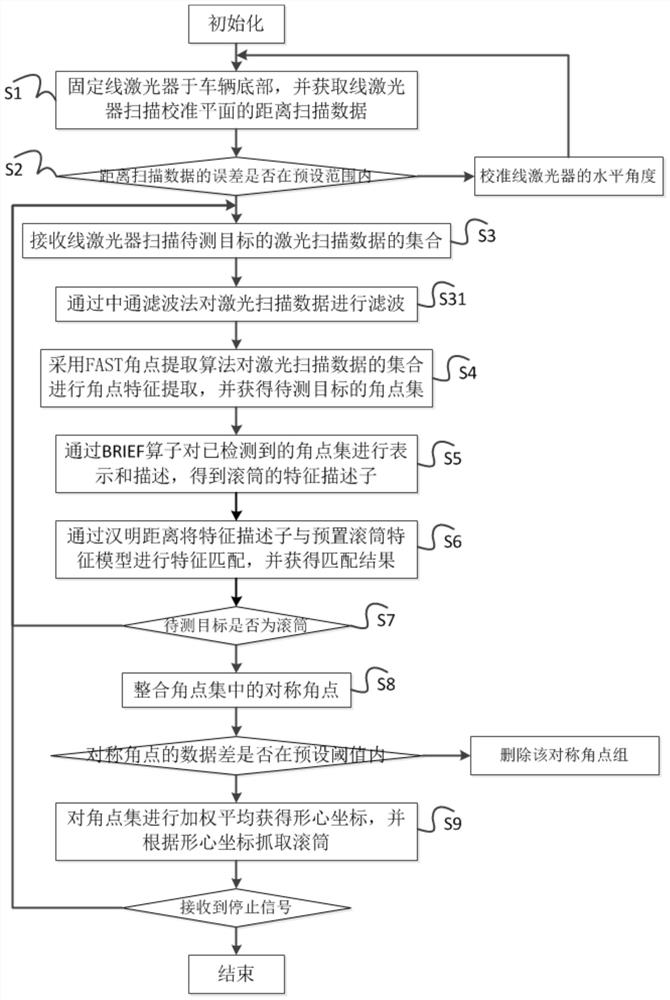
图1为一种基于ORB特征的轨道铺设滚筒的识别算法的方法步骤图;
图2为一种基于ORB特征的轨道铺设滚筒的识别系统的系统结构图;
图3为线激光器的安装示意图;
图4为滚筒的角点定位示意图;
图5为滚筒的三维示意图。
附图标记说明:1-线激光器、2-固定平台、3-激光平面、4-角点。
具体实施方式
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
实施例一
为了实现滚筒的自动化识别,同时提高滚筒回收车回收滚筒的效率,如图1所示,本发明提出了一种基于ORB特征的轨道铺设滚筒的识别方法,在系统初始化后,包括步骤:
S1:固定线激光器于车辆底部,并获取线激光器扫描校准平面的距离扫描数据(同时为了获得距离信息,还需融合编码器的距离信息以获得二位高度矩阵);
S2:判断距离扫描数据的误差是否在预设范围内,若是,进入下一步骤,若否,校准线激光器的水平角度并返回步骤S1。
如图3所示,线激光器1通过固定平台2固定在滚筒回收车的底部,而在线激光器1投入使用前,需要对其水平度进行校准。因为只有当线激光器1安装位置固定,且经过水平度校验后才能保证算法计算时数据的准确性。
S3:接收线激光器扫描待测目标的激光扫描数据的集合;
S31:通过中通滤波法对激光扫描数据进行滤波。
在实际应用中,如图3所示,线激光器通过扫描获取数据时,需要对激光扫描数据通过中值滤波算法进行滤波处理,消除因激光三角法(线激光器发射出一个激光平面3,呈三角平面,也叫光刀面,激光平面照射到物体上就形成了一道线激光)死区造成的极大数据以及因光照等原因丢失的数据的影响。
S4:采用FAST角点提取算法对激光扫描数据的集合进行角点特征提取(FeatherDetect),并获得待测目标的角点集;(FAST角点提取:找出图像中的角点,与原来的FAST算法相比,ORB中计算了特征点的主方向,为BRIEF描述子增加了旋转不变性)
S5:通过BRIEF算子对已检测到的角点集进行表示和描述(Feather Descriptor),得到滚筒的特征描述子;(BRIEF描述子:对前一步找到的关键点周围的像素区域进行描述,由于BRIEF对于图像旋转十分敏感,因此ORB对BRIEF进行了改进,利用上一步计算出的方向信息增强BRIEF的旋转不变性)
S6:通过汉明距离(Hamming distance)将特征描述子与预置滚筒特征模型进行特征匹配(Feather Match),并获得匹配结果。
为了实现特征点获取的简便高效,本发明选用FAST算法的方式来对激光扫描数据的集合中的特征点进行提取,BRIEF描述来对提取出的角点进行描述。
其中,所述BRIEF算子是一种以特征点为中心,在预设窗口内随机选取N对随机数据点,对各对随机数据点根据高度信息进行二进制赋值,并最终形成二进制编码,其公式为:
式中,τ(p;x,y)为特征点的二进制值,p(x)为随机点x=(u1,v1)的高度值,p(y)为随机点y=(u2,v2)的高度值。
而所述预置滚筒特征模型为采用harris角点检测算法对标准滚筒模型进行角点特征提取。Harris通过运用微分运算和自相关矩阵改进了Moravec角点检测算法。用微分算子重新定义灰度强度变化的公式,其灰度强度变化表示为:
式中的
S7:根据匹配结果判断待测目标是否为滚筒,若是,进入下一步骤,若否,返回步骤S3;
S8:整合角点集中的对称角点,并判断对称角点的数据差是否在预设阈值内,若是,进入下一步骤,若否,删除该对称角点组。
如4和图5所示,由三维图可以看出滚筒的整体结构为对称式结构。其特征点(角点4,为图4中的圆圈)在角点定位示意图中也是呈左右对称式排布,包括水平方向以及竖直方向两个方向上的对称角点4。基于这一点,通过判断左右相对称角点4的坐标数据的误差是否在预设阈值内,就可将滤除错误角点信息,使得余下的角点信息更加符合滚筒实际的角点特征。利用这一判断步骤,提高了滚筒角点特征提取的准确率,从而提高了滚筒识别的精确度。
S9:对角点集进行加权平均获得形心坐标,并根据形心坐标抓取滚筒。
同时,在滚筒抓取完毕后,若未接收到停止信号,则返回步骤S3。
实施例二
为了更好的对本发明的技术内容进行描述,了解整体组成结构,如图2所示,本发明提出了一种基于ORB特征的轨道铺设滚筒的识别系统,包括固定平台、水平仪、线激光器、上位机和机械手,其中:
固定平台用于将线激光器固定于车辆底部;
水平仪用于校准线激光器的安装水平度;
线激光器用于扫描待测目标或校准平面,分别获得激光扫描数据的集合或距离扫描数据;
上位机用于根据距离扫描数据判断其误差是否在预设范围内,若否,调整线激光器的水平角度;
上位机还用于利用FAST角点提取算法对激光扫描数据的集合进行角点特征提取,并获得待测目标的角点集;
上位机还用于通过BRIEF算子对已检测到的角点集进行表示和描述,得到滚筒的特征描述子,并通过汉明距离将特征描述子与预置滚筒特征模型进行特征匹配,并获得匹配结果;在判断待测目标为滚筒时对数据差符合预设阈值的对称角点进行加权平均并获得形心坐标,根据形心坐标控制机械手抓取滚筒。
进一步地,所述上位机中还包括预处理单元,用于通过中通滤波法对激光扫描数据进行滤波。
进一步地,所述BRIEF算子为一种以特征点为中心,在预设窗口内随机选取N对随机数据点,对各对随机数据点根据高度信息进行二进制赋值,并最终形成二进制编码,其公式为:
式中,τ(p;x,y)为特征点的二进制值,p(x)为随机点x=(u1,v1)的高度值,p(y)为随机点y=(u2,v2)的高度值。
进一步地,所述上位机中还包括模板生成单元,用于采用harris角点检测算法对标准滚筒模型进行角点特征提取并生成预置滚筒特征模型。
综上所述,本发明所述的一种基于ORB特征的轨道铺设滚筒的识别方法与系统,通过对线激光器水平角度的校准,使得激光扫描数据稳定性高、一致性强,同时,因为安装位置固定,可以通过ORB算法进行特征匹配;考虑到滚筒各角点对称性的特点,在通过FAST子进行特征点(角点)提取、BRIEF描述子对特征进行描述后,通过角点对称性的判断筛选角点信息,从而使得识别结果更加准确、迅速,同时采用FAST算法提取、BRIEF描述子进行描述,使得特征点提取更加稳定。
通过一系列的算法计算智能化的对滚筒进行识别,将滚筒的放置误差维持在允许范围内,避免施工人员工作的重复性、高强度,提高了施工效率;采用自动化施工,不受环境与天气影响,缩减了施工周期。
本文中所描述的具体实施例仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
- 一种基于ORB特征的轨道铺设滚筒的识别方法与系统
- 一种基于改进的LBP特征和LNDP特征相融合的改进ORB算法