一种便携式肢体关节单光子CT成像系统
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及的是一种医疗器械技术领域的装置,具体是一种便携式肢体关节单光子CT成像系统。
背景技术
CT(Computed Tomography),即计算机断层扫描,利用精确准直的X射线束与高灵敏度探测器一同围绕人体的某一部位作一个接一个的断面扫描,从而重构出人体病灶部位的三维图像,可用于人体多种疾病的检查。
现阶段临床中,CT成像和核磁共振成像都是用来诊断肢体关节疾病的重要医疗手段。对于肢体关节,CT能够获得清晰的骨骼和关节处的成像且空间分辨率较好;而核磁共振技术对于关节软骨、韧带、半月板、滑膜等软组织检查具有优势,但空间分辨率较差。因此,肢体关节成像大多采用CT来实现。现阶段的CT成像系统在对肢体关节扫描时,需要整个身体进入扫描腔,设备体积庞大,只能用于在固定的地点进行检查,不方便移动使用。同时,CT技术用于检查时还存在以下问题:(1)扫描设备成本昂贵;(2)需要专业人员操作且操作流程复杂繁琐;(3)扫描所需时间长且容易累积较大的X射线剂量。
发明内容
本发明针对现有技术存在的上述不足,提供了一种便携式肢体关节单光子CT成像系统,解决了传统肢体关节CT成像中存在的射线剂量高、设备不灵活、设备成本高、操作复杂以及扫描时间长等问题,具有操作灵活、成像清晰、辐射剂量低、扫描时间短等优点,适用于临床肢体关节以及小型动物的医疗诊断。
本发明是通过以下技术方案实现的:一种便携式肢体关节单光子CT成像设备,包括:支撑结构、滑环导轨、X射线源、硅光电倍增器(Silicon Photomultiplier,简称为SiPM)探测器模块、数据采集模块、驱动模块、处理器、供电模块以及通信模块;
所述的支撑结构,用于支撑固定滑环导轨和系统各模块;
所述的滑环导轨,用于搭载X射线源和SiPM探测器模块;
所述的X射线源,用于发射被检测的X射线束;
所述的SiPM探测器模块,用于探测所述射线源发射的X射线,将X射线转换成电脉冲信号;
所述的数据采集模块,用于实时采集所述转换后的数字信号;
所述的驱动模块,用于驱动滑环导轨上的X射线源和SiPM探测器模块进行同步螺旋旋转扫描;
所述处理器,用于控制X射线源、SiPM探测器模块、驱动模块、数据采集模块以及通信模块的运行;
所述的通信模块,用于远程数据传输和远程操作控制;
所述的供电模块,用于提供整体系统电路运行所需的电源。
进一步地,所述的X射线源可以通过设置调节X射线的放射剂量和能量,包含前准直器,通过约束将X射线准直成锥形光束,与SiPM探测器模块的探测窗口有效匹配。
进一步地,所述X射线源与SiPM探测器模块在滑环导轨上呈180度相对布置,且所述X射线源与SiPM探测器模块通过外部配重使得两者质量差在平衡范围内。
进一步地,所述的SiPM探测器模块包括:后准直器、闪烁体、SiPM探测器。
进一步地,所述的后准直器设置于所述SiPM探测器模块的探测窗口上方,用于将每个探测器单元的接收角度限制在一定范围,排除其他非相关信号的干扰。
进一步地,所述的闪烁体,用于将X射线转换成可见光信号被SiPM探测器探测。
进一步地,所述的SiPM探测器,用于将所述的可见光信号转换成电脉冲信号,同时转换后的电脉冲信号被数据采集模块实时收集。
进一步地,所述的SiPM探测器模块呈弧形分布,使其对X射线的接收面积更大。SiPM探测器模块采用SiPM探测器单元和闪烁体一对一耦合的方式,排列形成探测阵列。
进一步地,所述的驱动模块用于驱动滑环导轨旋转装置和导轨水平移动装置,所述的滑环导轨旋转装置通过驱动机械齿轮带动滑环导轨上的X射线源与SiPM探测器模块同步旋转;所述的导轨水平移动装置通过驱动电机使滑环导轨沿肢体长度方向前进;最终驱动模块驱动滑环导轨旋转装置和导轨水平移动装置同步运行,带动滑环导轨上的X射线源和SiPM探测器模块完成螺旋扫描。
进一步地,所述的数据采集模块除了采集SiPM探测器模块输出的探测信号之外,还包括导轨转速传感器,用于实时采集导轨的旋转速度,所采集的转速数据用于CT图像重建。
进一步地,所述的处理器还包括图像处理模块,所述的图像处理模块用于对所述的数据采集模块采集的数字信号进行即时的CT图像的重建与处理。
进一步地,所述的处理器控制驱动模块来调节滑环导轨旋转的转速和导轨水平移动的速度。
进一步地,所述的通信模块包括数据传输单元和远程控制单元,其中,所述的数据传输单元包括蓝牙、Wi-Fi模块和网卡,能将采集到的数据和重建的CT图像传输至云端;所述的远程控制单元通过蓝牙方式或网络方式连接,通过远程指令输入操作处理器控制系统实现扫描、CT图像重建,完成肢体关节成像。
与现有技术相比,本发明具有以下优点:
1)设备体积小,结构紧凑,成本低,操作灵活方便;
2)扫描部位集中,扫描速度快,成像耗时短;
3)SiPM具备单光子探测灵敏度,成像清晰度,且所需X射线剂量低,对人体危害小。
附图说明
图1为本发明便携式肢体关节CT成像系统成像部分结构图;
图2为本发明便携式肢体关节CT成像系统成像探测器成像原理图;
图3为本发明便携式肢体关节CT成像系统成像整体结构示意图;
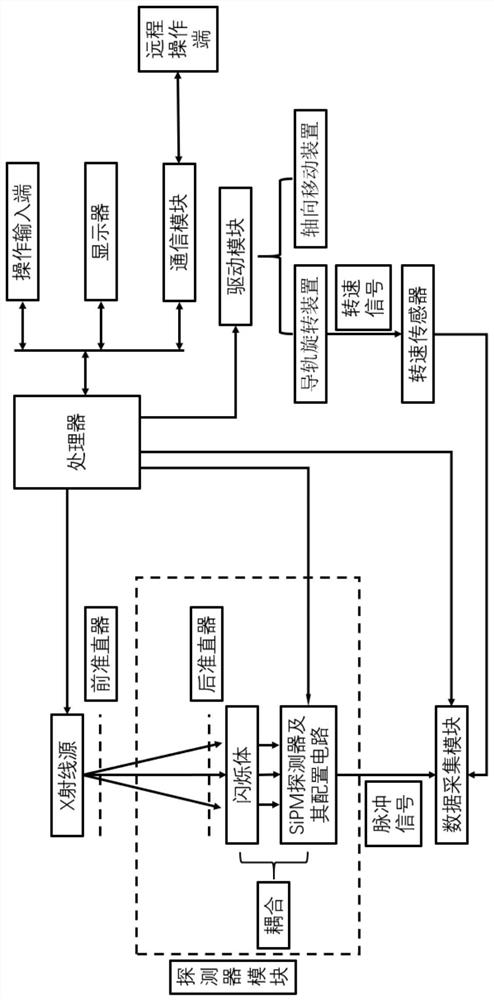
图4为本发明便携式肢体关节CT成像系统模块图;
图5为本发明便携式肢体关节CT成像系统操作流程图;
图中:1.从动齿轮、2.耦合前准直器的X射线源、3.滑环导轨、4.耦合前准直器和闪烁体的SiPM探测器、5.机械齿轮模组、6.导轨水平移动轨道7.X射线源、8.前准直器、9.后准直器、10.闪烁体、11.SiPM探测器、12.显示器、13.操作端、14.电源系统、15.处理系统。
具体实施方式
以下结合附图对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
实施例1
如图1、3所示,本实例包括:从动齿轮1、耦合前准直器8的X射线源2、滑环导轨3、耦合后准直器9和闪烁体10的SiPM探测器4、机械齿轮模组5、导轨水平移动轨道6、显示器12、操作端13、电源系统14、处理系统15,其中:X射线源3、SiPM探测器4通过连接件安装在滑环导轨3上,同时机械齿轮模组5中的齿轮与环形齿圈导轨3上的齿圈14相匹配。
所述的从动齿轮1随的转动相对旋转,用于限制滑环导轨3的转动空间,使滑环导轨3绕着z轴平稳旋转。
所述的耦合前准直器8的X射线源2以及耦合后准直器9和闪烁体10的SiPM探测器4通过机械固定在滑环导轨3上呈180度相对布置。
所述的耦合前准直器8的X射线源2以及耦合后准直器9和闪烁体10的SiPM探测器4通过外部配重后使得两者质量差在平衡范围内。
所述的电源系统14为系统驱动、X射线源运行、SiPM探测器数据转换、数据采集模块数据采集、处理器控制运算提供电源。
所述的处理系统14包括处理器、通信模块、数据采集模块,拥有数据采集、CT图像重建、图像重建和操作操控的功能。
所述的处理系统15通过连接并控制耦合前准直器的X射线源2、耦合前准直器和闪烁体的SiPM探测器4、机械齿轮模组5、显示器12、操作端13。
本装置成像原理如下:
X射线源7发射X射线束,X射线束经过前准直器8被准直成锥形光束,准直后的锥形X射线束透过肢体关节。由于人体不同组织对X射线的吸收系数是不同的,所以透过肢体关节后的X射线会形成不同程度的衰减。透射后的X射线束会经过后准直器9筛选,排除非相关信号的干扰。剩下的有效信号会被闪烁体10接收从而发出荧光,闪烁晶体输出的光子数量与入射X射线的能量成正比。微弱的荧光被SiPM探测器11探测,并放大形成电脉冲信号。SiPM探测器11输出脉冲的高度可以反映入射X射线的能量。被放大后的电信号经采集并通过CT图像重建后转换变成数字图像,按照一定格式存储在处理器内。
本装置工作过程如下:
如图1所示,滑环导轨旋转装置的电机带动机械齿轮模组5旋转,机械齿轮模组5与滑环导轨3的齿圈相匹配,从而带动滑环导轨3旋转,实现滑环导轨上X射线源2与SiPM探测器4同步旋转,同时导轨水平移动装置带动滑环导轨3在导轨水平移动轨道6上沿z轴方向前进,驱动模块驱动滑环导轨旋转装置和导轨水平移动装置同步运行,实现CT扫描设备的360°螺旋扫描。
本装置操作步骤如下:
步骤1:操作人员根据患者的年龄及身体状况通过操作端调节X射线的放射剂量和能量。
步骤2:操作人员协助患者将肢体放在预先规定的优选成像位置上等待扫描。
步骤3:操作人员操作CT扫描设备运行,扫描设备对患者的肢体进行360°螺旋扫描。
步骤4:扫描形成的信号被数据采集模块实时收集,并通过图像处理模块进行CT图像重建和图像清晰度优化。
步骤5:操作人员判断重建优化后的图像是否清晰;若不清晰,则重复步骤2、3、4,直至图像清晰。
步骤6:操作人员导出清晰图像,并将数据上传到数据库。
以上仅为本发明具体实施例,不能以此来限定本发明的范围,本技术领域内的一般技术人员根据本创作所作的均等变化,以及本领域内技术人员熟知的改变都应仍属于本发明涵盖的范围。
- 一种便携式肢体关节单光子CT成像系统
- 一种便携式肢体关节单光子CT成像系统