一种基于时序信息建模的机器人无地图导航方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明属于信息科学领域,涉及一种导航方法,具体涉及一种基于时序信息建模的机器人无地图导航方法。
背景技术
至今,机器人已在工业制造、家庭服务、星际探测、军事侦察等领域创造了巨大的价值。相比于常用在工业领域的固定结构机器人,移动机器人的重要特点就是其机动性与灵活性,为了实现移动机器人的机动性,自主导航是必不可少的技术之一。自主导航是指移动机器人通过雷达、声纳、摄像头等传感器,感知外部环境信息,结合自身状态信息,完成在有障碍物环境下无碰撞地到达目标点地自主运动过程。移动机器人具备高效、可靠的导航功能,才能更好的应用在工业、服务、军事等方面,为社会带来更高的价值。
机器人导航技术可分为两种情况:面对已知环境和面对未知环境。面对已知环境是指机器人具备环境的导航地图,在此种状况下,可使用基于地图的导航方法。机器人所使用的导航地图一般通过SLAM(Simultaneous Localization and Mapping)来构建,之后使用路径规划算法来规划机器人路径实现导航。图1为基于地图的机器人导航示例。
基于地图的导航机器人方法需要花费长时间来构建环境地图,对陌生环境无法适应。面对未知环境下的情况下的机器人导航也被称为无地图导航,常用的传统算法有动态窗口算法,D*算法,向量直方图算法等。除此之外,随着深度学习的发展,基于学习的方法也逐渐成为无地图导航方法研究的主流,可以使用无监督学习的方法,认为机器人导航过程具有马尔可夫性,基于强化学习对导航建模,机器人学习针对当前状态如何做出合适的动作,通过随机探索来完成导航策略的学习。但是基于强化学习的无监督方法,学习时间长,数据利用率低,模型难以收敛,且导航效果无法保障。针对此问题,有学者使用基于监督学习的方法来解决导航问题,获取导航监督数据之后,搭建神经网络模型拟合导航数据。
移动机器人通过传感器获取外部环境信息,前人工作中,通常将传感器信息直接用全连接神经网络处理,或者使用卷积神经网络提取传感器数据特征。但这些方法对数据时序特性提供的信息利用不充分,在动态环境中对时变的对象(如动态障碍物)不能很好预测,因此带来复杂动态场景中导航性能的显著下降。
发明内容
本发明的目的是提供一种机器人无地图导航方法,本发明基于时序信息建模的移动机器人无地图导航方法,通过构建大规模导航数据集,针对导航数据中的时序信息建模,获得性能更佳的导航模型。在任意环境下,通过现有定位技术获取目标位置信息,机器人躲避环境中的障碍物到达目标位置,可用于商场机器人购物车自动寻人、医院服务机器人自动寻人等场景。
为实现上述目的,本发明采用的技术方案如下:
一种基于时序信息建模的机器人无地图导航方法,其步骤包括:
基于循环神经网络构建移动机器人导航模型,该机器人导航模型含有移动机器人根据移动机器人上的传感器信息、场景中的目标位置信息到移动机器人执行速度指令的映射关系;移动机器人按照该机器人导航模型输出的速度指令到达导航目标位置;
获取或构建导航数据集作为监督数据训练该移动机器人导航模型;
通过该移动机器人搭载的激光雷达获取传感器数据,使用定位技术获取场景中的目标位置信息,然后通过训练后的该移动机器人导航模型计算该移动机器人的执行速度指令,通过执行速度指令操控该移动机器人到达目标位置。
进一步的,构建导航数据集的方法为:根据多种真实室内环境布局搭建不同仿真环境;然后在仿真环境中,移动机器人仿真模型预先构建环境地图,之后随机设置目标点,使用路径规划算法规划导航路径并导航,在导航过程中记录移动机器人状态信息;然后将所采集移动机器人状态信息作为用于导航模型训练的数据集。
进一步的,所述移动机器人状态信息包括360维雷达信息、2维速度信息、2维目标位置信息。
进一步的,在Gazebo仿真环境下,根据多种真实室内环境布局搭建不同仿真环境。
进一步的,移动机器人仿真模型预先使用SLAM技术构建环境地图。
进一步的,所述移动机器人导航模型包括LSTM神经网络和CNN;其中CNN用于从移动机器人采集的激光数据中提取当前时刻的空间特征并输入LSTM神经网络,根据移动机器人采集的激光数据获取当前时刻以该移动机器人为中心的坐标系中的相对目标位置;然后LSTM神经网络根据该移动机器人的上一刻移动速度、当前时刻的相对目标位置信息和当前时刻的空间特征,预测当前时刻该移动机器人的执行速度。
进一步的,所述相对目标位置由包含距离和角度的极坐标表示。
进一步的,该移动机器人的速度包含线速度和角速度。
进一步的,训练该移动机器人导航模型的方法为:使用导航数据集作为监督数据,对该移动机器人导航模型进行训练,损失函数使用均方误差损失函数,通过梯度下降法实现模型训练。
本发明的移动机器人无地图导航方法包括以下步骤:
基于循环神经网络构建移动机器人导航模型,该模型含有移动机器人根据传感器信息、目标位置信息到执行速度指令的映射关系,机器人按照模型输出的速度指令到达导航目标位置。
使用基于SLAM的导航方法构建导航数据集作为监督数据来训练导航模型。通过机器人搭载的激光雷达获取传感器数据,使用定位技术获取目标位置信息,通过导航模型计算移动机器人的执行速度指令,通过执行控制指令操控移动机器人到达目标位置。
与现有技术相比,本发明的积极效果为:
本发明显式的利用了传感器信号的时序特征,提高了机器人在复杂环境下的导航性能。其中机器人的导航成功率和导航效率都比传统的SLAM方法有的提升,具体的数据和分析会在下文表1中展示。
该方法能够让移动机器人在获取环境目标信息的情况下,获得避障导航能力。
附图说明
图1是移动机器人导航示意图;
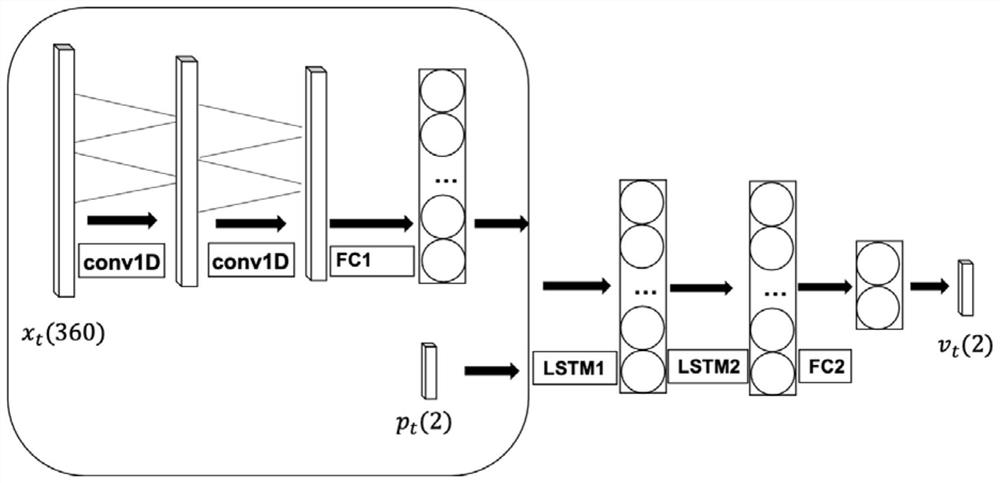
图2是循环神经网络模型示意图。
具体实施方式
为了使移动机器人在未知环境下实现无碰撞的最佳动作,本发明提出了一种无地图的导航方法。本发明通过学习演示,提出了面向机器人平台的面向目标的端到端导航模型。该模型可以学习一个复杂的策略:机器人根据环境信息选择移动方式,其中包含原始2D激光测距结果和目标位置。传感器测得的环境信息具有时间序列特征:比如根据当前时间和上次时间的二维激光测距发现,可以确定机器人是接近还是远离周围环境障碍;根据当前时间和前一时间的目标位置信息,还可以确定机器人当前的运动是否接近或远离目标。根据导航过程的环境状态的时间序列信息,我们使用循环神经网络从演示数据中学习导航策略。长短时记忆(LSTM)神经网络是循环神经网络的一种,采用这种神经网络结构的导航策略能够根据过去的环境和运动状态以进行运动规划。为了验证这项工作的导航模型的有效性,与最新方法相比,我们提出了一种定量、准确的评估方法。
本发明通过循环神经网络对移动机器人运动过程中的时序信息建模从而习得导航能力。以下列举实施过程,并结合附图,具体说明本发明提出的基于循环神经网络习得导航的方法。
(1)数据获取:在本发明所使用的技术方案中依赖导航数据集,由于目前没有开源的导航数据集,我们需要构建自己的数据集。在Gazebo仿真环境下,根据多种真实室内环境布局搭建不同仿真环境。在仿真环境中,移动机器人仿真模型预先使用SLAM技术构建环境地图,之后随机设置目标点,使用路径规划算法规划导航路径并导航。在导航过程中记录移动机器人状态信息,包括360维雷达信息、2维速度信息、2维目标位置信息在内,设置采样间隔为0.1秒。整个数据集包含8种不同的环境,每种环境中设置了5~7个随机目标点,最终有超过1000条采样数据供给后续方案进行训练。
(2)模型构建:我们的工作着眼于导航期间时序信息的建模。为了对机器人和障碍物之间的复杂关联进行建模,我们使用LSTM神经网络,该网络近年来已经成功地证明了其在序列建模和预测任务中的高性能。如图2所示,输入由2D激光测距仪,以机器人为中心的坐标系中的相对目标位置以及机器人的上一刻速度给出。激光测距的尺寸为360度,相对目标位置由包含距离和角度的极坐标表示,上一刻的机器人速度包含了线速度和角速度。为了提取激光数据的空间特征,使用CNN处理360维激光数据;然后通过全连接层FC1进行降维,这种方式能很好的对激光数据的空间特征进行建模。之后,将处理后的激光信息,相对目标位置,机器人上一刻速度三个信息通道作为输入并由两层堆叠的LSTM进行融合,最终移动机器人的执行速度通过全连接层FC2进行预测。
(3)模型训练:使用获取的导航数据作为监督数据,对循环神经网络导航模型进行训练,损失函数使用均方误差损失函数,通过梯度下降法实现模型训练。
为验证方法的有效性,本发明在Gazebo仿真平台上进行了仿真实验,实验结果如表1所示:
表1为实验结果表
从表1可以看出本发明提出的方法可以提升移动机器人的导航成功率和导航效率。
以上实施例仅用以说明本发明的技术方案而非对其进行限制,本领域的普通技术人员可以对本发明的技术方案进行修改或者等同替换,本发明的保护范围以权利要求所述为准。
- 一种基于时序信息建模的机器人无地图导航方法
- 一种基于深度安全强化学习的机器人无地图导航方法