一种低轨卫星被动对月定标时机计算方法和系统
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于卫星遥感技术领域,尤其涉及一种低轨卫星被动对月定标时机计算方法和系统。
背景技术
国外MODIS、SeaWiFS、Pleiades、GOES等,以及国内风云三号卫星的MERSI均具备在轨对月定标能力。卫星在轨对月定标模式分主动式和被动式,主动式需要卫星主动进行姿态机动或载荷摆镜指向跟踪,调整探测器视场指向月球进行成像定标,尽管定标周期和定标效率更高,但对卫星工作模式和任务编排要求严格,部分卫星由于姿态机动能力和载荷模式等原因,无法采用主动式。
发明内容
本发明的技术解决问题:克服现有技术的不足,提供一种低轨卫星被动对月定标时机计算方法和系统,分析了对月定标时机等参数,为长期监测遥感卫星探测器稳定性和后续建立中国月球辐射模型提供了数据支撑。
为了解决上述技术问题,本发明公开了一种低轨卫星被动对月定标时机计算方法,包括:
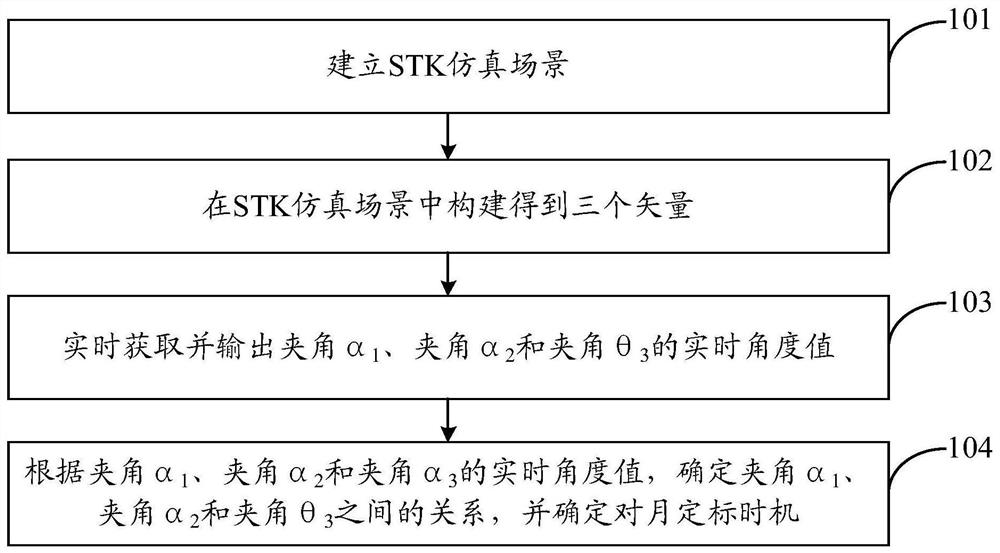
建立STK仿真场景;
在STK仿真场景中构建得到三个矢量;其中,第一矢量为冷空视场开始矢量,第二矢量为冷空结束矢量,第三矢量为卫星本体至月球的矢量;
实时获取并输出夹角α
根据夹角α
在上述低轨卫星被动对月定标时机计算方法中,建立STK仿真场景,包括:
获取轨道半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和平近点角;
将轨道半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和平近点角作为STK的输入参数,建立得到STK仿真场景。
在上述低轨卫星被动对月定标时机计算方法中,在STK仿真场景中构建得到三个矢量,包括:
以扫描中心为原点O建立圆周扫描圆盘坐标系O-XYZ;其中,X轴为飞行方向垂直纸面向外,Z轴指向地心,Y轴与X轴和Z轴构成右手系;
确定星下点成像矢量Sub_point_vector;其中,星下点成像矢量Sub_point_vector与Z轴重合,起点为原点O;
朝向X方向,星下点成像矢量Sub_point_vector逆时针旋转角度θ
朝向X方向,星下点成像矢量Sub_point_vector逆时针旋转角度θ
以原点O为起点,月球中心Om为终点,构建得到卫星本体至月球的矢量sat2moon_vector。
在上述低轨卫星被动对月定标时机计算方法中,角度θ
在上述低轨卫星被动对月定标时机计算方法中,根据夹角α
若根据夹角α
在上述低轨卫星被动对月定标时机计算方法中,在实时获取并输出夹角α
在上述低轨卫星被动对月定标时机计算方法中,在将此时的UTC时间作为对月定标时机之后,还包括:确定此时的UTC时间对应的星下点经纬度并输出。
在上述低轨卫星被动对月定标时机计算方法中,建立STK仿真场景、在STK仿真场景中构建得到三个矢量和实时获取并输出夹角α
在上述低轨卫星被动对月定标时机计算方法中,根据夹角α
相应的,本发明还公开了一种低轨卫星被动对月定标时机计算系统,包括:
仿真模块,用于建立STK仿真场景;
矢量构建模块,用于在STK仿真场景中构建得到三个矢量;其中,第一矢量为冷空视场开始矢量,第二矢量为冷空结束矢量,第三矢量为卫星本体至月球的矢量;
数据获取模块,用于实时获取并输出夹角α
判定模块,用于根据夹角α
本发明具有以下优点:
(1)本发明公开了一种低轨卫星被动对月定标时机计算方案,场景建立简洁,各矢量及夹角关系明确,便于后续数据计算;
(2)本发明公开了一种低轨卫星被动对月定标时机计算方案,可计算得到卫星系统被动对月定标时机及相应地面经纬度,有利于地面应用系统开展数据定标工作,同时利用冷空视场复用作为对月定标视场,提升了卫星系统使用效能。
(3)本发明公开了一种低轨卫星被动对月定标时机计算方案,分析了对月定标时机等参数。并将研究成果应用于某低轨遥感卫星,验证了本发明方案的正确性及合理性;同时为长期监测遥感卫星探测器稳定性和后续建立中国月球辐射模型提供了数据支撑。
附图说明
图1是本发明实施例中一种低轨卫星被动对月定标时机计算方法的步骤流程图;
图2是本发明实施例中一种矢量构建示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
如图1,在本实施例中,该低轨卫星被动对月定标时机计算方法,包括:
步骤101,建立STK仿真场景。
在本实施例中,可以获取轨道半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和平近点角;然后,将获取的轨道半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和平近点角作为STK的输入参数,建立得到STK仿真场景。
优选的,轨道半长轴、偏心率、轨道倾角、近地点幅角、升交点赤经和平近点角的取值可以如下:半长轴=7028.14km、偏心率=0.0010691°、轨道倾角=98.45°、近地点幅角=253.74°、升交点赤经=225.84°、平近点角=45.22°。
步骤102,在STK仿真场景中构建得到三个矢量。
在本实施例中,第一矢量是指冷空视场开始矢量,第二矢量是指冷空结束矢量,第三矢量是指卫星本体至月球的矢量。优选的,如图2,各矢量的建立过程如下:
1)以扫描中心为原点O建立圆周扫描圆盘坐标系O-XYZ。其中,X轴为飞行方向垂直纸面向外,Z轴指向地心,Y轴与X轴和Z轴构成右手系。
2)确定星下点成像矢量Sub_point_vector。其中,星下点成像矢量Sub_point_vector与Z轴重合,起点为原点O。
3)朝向X方向,星下点成像矢量Sub_point_vector逆时针旋转角度θ
4)朝向X方向,星下点成像矢量Sub_point_vector逆时针旋转角度θ
5)以原点O为起点,月球中心Om为终点,构建得到卫星本体至月球的矢量sat2moon_vector。
其中,需要说明的是,角度θ
步骤103,实时获取并输出夹角α
在本实施例中,夹角α
步骤104,根据夹角α
在本实施例中,若根据夹角α
在本发明的一优选实施例中,在步骤103实时获取并输出夹角α
其中,需要说明的是,上述步骤101~103可以在STK软件中实现;步骤104可以在MATLAB软件中实现。
在上述实施例的基础上,本发明还公开了一种低轨卫星被动对月定标时机计算系统,包括:仿真模块,用于建立STK仿真场景。矢量构建模块,用于在STK仿真场景中构建得到三个矢量;其中,第一矢量为冷空视场开始矢量,第二矢量为冷空结束矢量,第三矢量为卫星本体至月球的矢量。数据获取模块,用于实时获取并输出夹角α
对于系统实施例而言,由于其与方法实施例相对应,所以描述的比较简单,相关之处参见方法实施例部分的说明即可。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
- 一种低轨卫星被动对月定标时机计算方法和系统
- 一种裙边加固基坑被动土压力计算方法及系统