自平衡式玻璃吊臂
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及擦窗机技术领域,具体为自平衡式玻璃吊臂。
背景技术
随着社会的发展,各大城市中的超高层楼宇建筑越来越多,随之而来的幕墙维修、更换的工作也越来越大,对于一些外立墙面复杂的楼宇(带凹面造型的外立面),在更换幕墙时,原先的玻璃吊已经不能满足维修工作,因而,会采用一些辅助的玻璃吊臂将维修玻璃等幕墙材料送入凹面进行维修施工。
然而,现有的辅助吊臂存在无法保持吊臂平衡这个缺陷,吊物安装完成后,吊臂前端失去平衡重量后,导致吊杆处于倾斜状态,大大降低了施工的安全性。
发明内容
本发明的目的在于提供自平衡式玻璃吊臂,以解决上述背景技术中提出的现有的辅助吊臂存在无法保持吊臂平衡这个缺陷,吊物安装完成后,吊臂前端失去平衡重量后,导致吊杆处于倾斜状态,大大降低了施工的安全性的问题。
为实现上述目的,本发明提供如下技术方案:自平衡式玻璃吊臂,包括吊杆主梁,所述吊杆主梁内部的两端安装有传动齿轮,所述吊杆主梁的前侧固定连接有伺服电机,所述伺服电机的传动端与相邻所述传动齿轮传动连接,所述传动齿轮的表面安装有移动链条,所述移动链条的两端安装有配重块,所述吊杆主梁的下端固定连接有隔档板,所述吊杆主梁的左下端固定连接有称重传感器,所述称重传感器的下端安装有吊钩,所述吊杆主梁的上端固定连接有斜拉支柱,所述吊杆主梁的上端位于斜拉支柱的右侧固定连接有双极性水平传感器,所述吊杆主梁的上端位于斜拉支柱的左侧固定连接有主控制CPU,所述吊杆主梁的上端位于双极性水平传感器的右侧与主控制CPU的左侧均固定连接有下连接块,所述斜拉支柱的上端固定连接有上连接块,所述下连接块的上端与上连接块的边侧分别设置有下斜拉钢丝组件与上斜拉钢丝组件,所述下斜拉钢丝组件与上斜拉钢丝组件之间安装有钢丝绳。
优选的,所述传动齿轮设置有两个,所述传动齿轮与吊杆主梁通过轴承转动连接,所述传动齿轮与移动链条啮合连接。
优选的,所述配重块包括配重块本体、移动轮与驱动电瓶,所述配重块本体的上端安装有移动轮。
优选的,所述驱动电瓶、称重传感器、双极性水平传感器与主控制CPU电性连接。
优选的,所述隔档板设置有两个,两个所述隔档板位于配重块的两侧。
优选的,所述斜拉支柱与吊杆主梁的连接处固定连接有加固板,所述加固板呈对称设置。
优选的,所述下连接块、下斜拉钢丝组件、上斜拉钢丝组件与钢丝绳均设置有三个。
优选的,所述吊杆主梁、下连接块、下斜拉钢丝组件、钢丝绳、上斜拉钢丝组件、上连接块与斜拉支柱呈三角形结构固定。
优选的,所述移动轮与吊杆主梁滑动连接,所述配重块本体的内部安装有驱动电瓶。
与现有技术相比,本发明的有益效果是:该自平衡式玻璃吊臂,通过机电一体化设计用于擦窗机辅助玻璃吊臂在额定重量时,通过称重传感器感知前端悬挂物的重量,主控制CPU通过计算,驱动伺服电机快速运动带动配重块(含驱动电瓶)到达合适位置,并不断通过和水平传感器数值反馈进行低速微调,实现了全闭环控制,称重端上的称重传感器,如果发现悬挂物体重量大于机构容许负载额定值,机构可产生报警并自动切换为等待模式,解决了吊臂的自动平衡问题。
附图说明
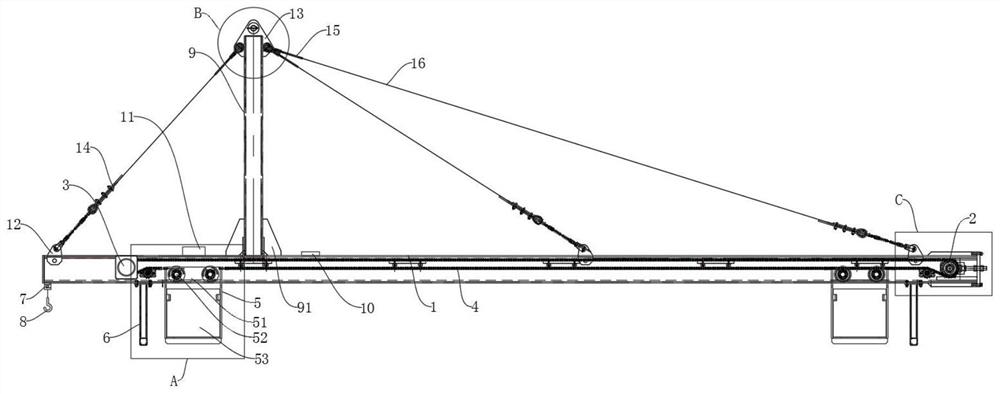
图1为本发明整体结构示意图;
图2为本发明图1中A处放大结构示意图;
图3为本发明图1中B处放大结构示意图;
图4为本发明图1中C处放大结构示意图。
图中:1、吊杆主梁;2、传动齿轮;3、伺服电机;4、移动链条;5、配重块;6、隔档板;7、称重传感器;8、吊钩;9、斜拉支柱;10、双极性水平传感器;11、主控制CPU;12、下连接块;13、上连接块;14、下斜拉钢丝组件;15、上斜拉钢丝组件;16、钢丝绳;51、配重块本体;52、移动轮;53、驱动电瓶;91、加固板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,本发明提供技术方案:自平衡式玻璃吊臂,包括吊杆主梁1,吊杆主梁1内部的两端安装有传动齿轮2,吊杆主梁1的前侧固定连接有伺服电机3,伺服电机3的传动端与相邻传动齿轮2传动连接,传动齿轮2的表面安装有移动链条4,移动链条4的两端安装有配重块5,传动齿轮2设置有两个,传动齿轮2与吊杆主梁1通过轴承转动连接,传动齿轮2与移动链条4啮合连接,便于带动配重块5的移动;
配重块5包括配重块本体51、移动轮52与驱动电瓶53,配重块本体51的上端安装有移动轮52,移动轮52与吊杆主梁1滑动连接,配重块本体51的内部安装有驱动电瓶53,便于配重块5的移动,以及整个吊臂的供电,吊杆主梁1的下端固定连接有隔档板6,隔档板6设置有两个,两个隔档板6位于配重块5的两侧,防止配重块5移出调节范围,吊杆主梁1的左下端固定连接有称重传感器7,称重传感器7的下端安装有吊钩8,吊杆主梁1的上端固定连接有斜拉支柱9,斜拉支柱9与吊杆主梁1的连接处固定连接有加固板91,加固板91呈对称设置,增强斜拉支柱9的稳定固定;
吊杆主梁1的上端位于斜拉支柱9的右侧固定连接有双极性水平传感器10,吊杆主梁1的上端位于斜拉支柱9的左侧固定连接有主控制CPU11,驱动电瓶53、称重传感器7、双极性水平传感器10与主控制CPU11电性连接,称重传感器7,实现整个吊臂的自动调节,吊杆主梁1的上端位于双极性水平传感器10的右侧与主控制CPU11的左侧均固定连接有下连接块12,斜拉支柱9的上端固定连接有上连接块13,下连接块12的上端与上连接块13的边侧分别设置有下斜拉钢丝组件14与上斜拉钢丝组件15,下斜拉钢丝组件14与上斜拉钢丝组件15之间安装有钢丝绳16,下连接块12、下斜拉钢丝组件14、上斜拉钢丝组件15与钢丝绳16均设置有三个,吊杆主梁1、下连接块12、下斜拉钢丝组件14、钢丝绳16、上斜拉钢丝组件15、上连接块13与斜拉支柱9呈三角形结构固定,确保整个吊臂的稳定性。
工作原理:对于这类的自平衡式玻璃吊臂,通过在主控制CPU11内的程序设置,此吊臂吊钩8空载时(载物为0),其配重块5在其吊臂的平衡原点,当吊臂吊钩8有载荷时,称重传感器7得到所载物品的重量,经过主控制CPU11内所设置的公式运算,其指令伺服电机3通过传动齿轮2与移动链条4,将配重块5快速移动至吊臂的平衡区域,此时双极性水平传感器10开始工作,对吊臂的平衡进行进一步的确认,如果超过其设定范围,双极性水平传感器10将不平衡的信息传输至主控CPU11,主控CPU11将需移动修正的数据,将发出指令给伺服电机3,伺服电机3将通过传动齿轮2与移动链条4,进行低速移动配重块5,进行相对平衡点位置的微调,确保吊臂平衡,反之,当吊钩8载物卸载后,或部分物品卸载后,整套系统重复上述运行步骤,当吊臂的吊钩8载重卸下后(或部分载重卸载),称重传感器7将信息传输至主控制CPU11后,主控制CPU11将通过内部设置公式的运算,指令伺服电机3快速移动配重块5至相对应的平衡区域,并且双极性水平传感器10开始对吊臂的水平进行进一步的确认,重复低速微调步骤,当吊臂载荷超出称重传感器7的设定范围(超载)时,吊臂将自动进行声光报警,并且停止一切运行动作,进而实现对吊臂平衡的自动调节,大大提高了施工时的安全性,由上所述,这种自动平衡式玻璃吊臂由于自带控制驱动电瓶53,使得其在吊物在空中时,始终可以通过双极性水平传感器10与伺服电机3连接,对平衡配重的机构进行水平确认自我微调,达到了整个使用过程全智能平衡,极大地提高了设备的安全性和自动化水平。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 自平衡式玻璃吊臂
- 基于钢绳牵引变幅的吊臂平衡式动臂塔机