一种用于十字交通路口的车流控制方法
文献发布时间:2023-06-19 11:26:00
技术领域
本发明涉及智能交通控制技术领域,具体涉及用于用于十字交通路口的车流控制方法。
背景技术
在道路基础设施建设相对固定的情况下,合理的交通信号控制策略可有效缓解交通路口拥堵状况,减小行车延误。随着城市规模的扩大,大中型城市的路网已经覆盖到距离市区较远的区域,城市功能区的分布不均,使得不同区域的路口之间流量高峰到达时间,流量峰值和波动特征等方面存在较大差异.例如,在居住人口密集的城郊区域,其道路早高峰期将提前于活动密集的城市中心区域,晚高峰则滞后。基于全局的定时信号控制灵活性较低,难以适应实际交通系统的需求;而感应配时大多利用短时局部信息,存在调控滞后性。利用城市道路高峰时间及流量分布,路段信息车流波动统计等交通实时监测及历史统计数据进行交通流状态识别,能较好实现交通流特征与交通信号控制策略的匹配,达到交通信号动态协调控制的目的。
基于无线传感器网络的智能交通系统具有覆盖广、成本低等关键特点[1],成为智能交通系统的发展的一个方向。利用无线传感器网络获取实时的交通数据,例如,各路口的候车数量、下一路口的通行情况等,蕴含着交通控制所需的重要信息,能够为交通信号灯的控制提供支持,从而成为一个研究课题,例如,文献[1]~[2]。现有文献较多地将关注点放在交通灯的配时和绿灯的顺序管理上。大体上可以分为两类:一类是固定式的(Static orFixed-time Control)[1],一类是自适应式的(Adaptive Control)[2]。固定式根据统计数据确定一个固定的绿灯顺序及时长,不能根据实时的情况动态地改变,采用固定配时方法效果最差,究其原因是为了便捷设置信号而忽略了路段信息不同而造成的车流量不同。这种方式是目前国内普遍应用的方式。自适应式期望通过分析实时的交通数据来决定信号灯的控制,是交通基础设施发展的方向,典型的代表系统有SCOOT、SCATS。但是,现有的自适应式方案采用的控制方式依然沿用了固定式的思路,思维上还限制在传统的“串行、依次”通行的模式上。例如,文献[1]、文献[3]等。
文献[1],利用无线传感器网络收集相邻的多个路口的相关信息。考虑了交通流的特点和特殊的情况,例如,有救护车、交通事故等。设计了绿灯配时算法和绿灯顺序决定算法。控制模式上还是“串行、依次”通行的模式。
文献[3],通过收集通过车辆的速度数据,综合计算来调整交通灯的时间,实现实时地交通灯控制。控制的方式最终还是体现在绿灯配时和绿灯顺序的计算上。
文献[4-5]应用改进的韦伯斯特配时算法控制交通信号,虽具一定的控制效果。但其优化的固定绿信比信号配时实质上仍是固定配时,当路口车流量分布比较离散时,车辆延误较高,自适应性较差。
传统的通行方案将不冲突的两支交通流放在一起作为一个调度单位,不区分流量的大小差别,根据控制的需求要么都通行、要么都停止。不够灵活,影响通行的效率。
发明内容
本发明提出了一种用于十字交通路口的车流控制方法,解决了现有交通控制中由于信号变换后带来的通行开销而降低了车流通行量的问题。
本发明采用的技术手段如下:
一种用于十字交通路口的车流控制方法,包括以下步骤,
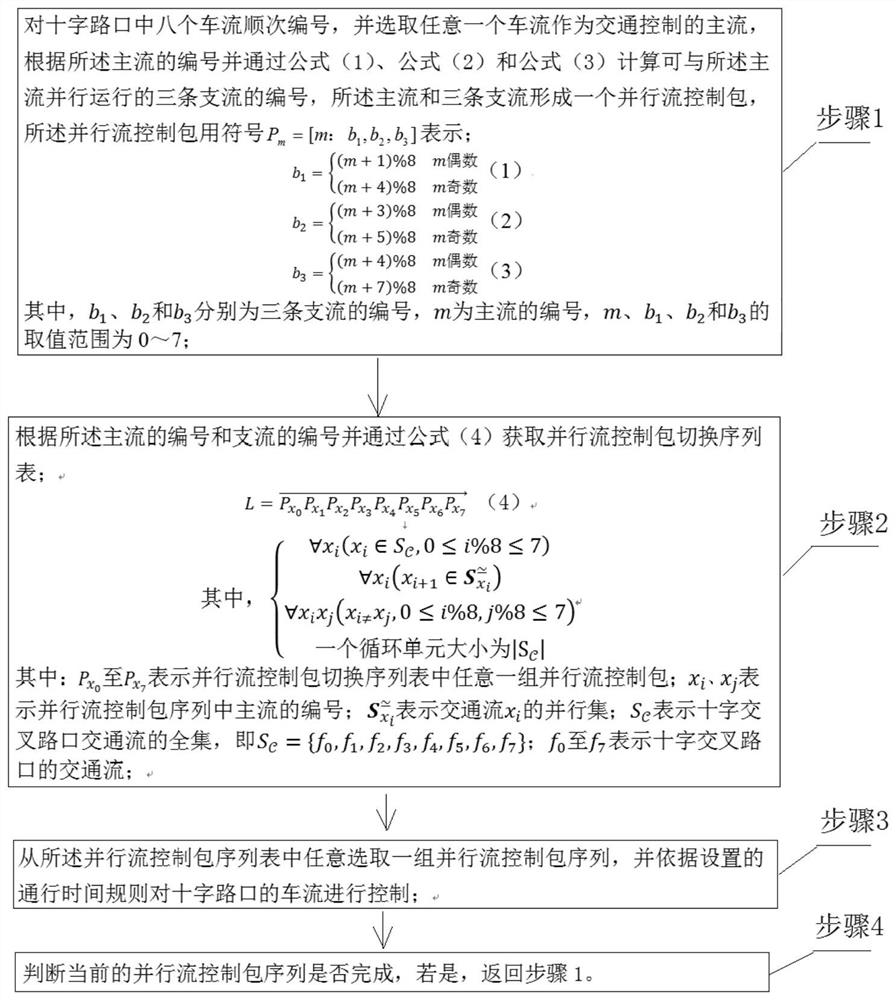
步骤1、对十字路口中八个车流顺次编号,并选取任意一个车流作为交通控制的主流,根据所述主流的编号并通过公式(1)、公式(2)和公式(3)计算可与所述主流并行运行的三条支流的编号,所述主流和三条支流形成一个并行流控制包,所述并行流控制包用符号P
其中,b
步骤2、根据所述主流的编号和支流的编号并通过公式(4)获取并行流控制包切换序列表;
其中,
其中:
步骤3、从所述并行流控制包序列表中任意选取一组并行流控制包序列,并依据设置的通行时间规则对十字路口的车流进行控制;
步骤4、判断当前的并行流控制包序列是否完成,若是,返回步骤1。
进一步地,所述通行时间规则具体为:
在并行流控制包的控制时间内,保持主流的车流一直通行,同时,在所述并行流控制包的控制时间内,基于等时依次切换规则或者实时交通数据切换规则调整支流的车流通行时间。
进一步地,所述基于实时交通数据切换规则调整支流的车流通行时间,包括:
获取所述三条支流的当前车流的流量f′
获取所述三条支流的当前候车长度L′
根据所述当前车流的流量f′
其中:假设f
与现有技术比较,本发明所述的用于十字交通路口的车流控制方法具有以下有益效果:本申请中通过将可以并行运行的多个车流放在一个并行流控制包进行控制,使得通行周期内分散的通行时间聚集起来,在通行机会均等的条件下,减少引入信号变换后带来的通行开销,进而达到提高通行量的目的。
附图说明
图1为十字路口的八车流的示意图,即交叉路口最简车流模型;
图2为交通流之间的互斥(冲突)关系示意图;
图3为单车道单向十字路口示意图;
图4为有右转交通流的十字路口车流示意图;
图5为有两条直行交通流的十字路口车流示意图;
图6为本发明公开的用于十字交通路口的车流控制方法的流程图;
图7为本发明中计算获取并行流控制包切换序列表,只示出了部分;
图8为本发明公开的控制方法的交通流切换序列;
图9为控制方式1的交通流切换序列;
图10为控制方式2的交通流切换序列;
图11为三种控制方式下车辆通过路口的数量与速度之间的关系图;
图12为本发明实施例2中用于采集车流和候车长度的布局示意图。
具体实施方式
如图1所示为现有的十字交叉路口八车道的车流示意图(注:该交叉路口为最简交通流模型),借用操作系统中的概念,交叉路口是临界资源,也就是交叉路口的使用具有互斥性,即同一时间只允许不相交的交通流通过。如图2所示揭示了交通流之间存在的互斥性、冲突性。设路口
交通信号起到协调多个交通流有序地、安全地使用交叉路口的作用。没有交通信号不能实现多个交通流分时复用交叉路口的目的。但是,引入交通信号会引入车辆吞吐量的损失,下面进行分析。
为了更为清楚地说明问题,将图1所示的路口简化为图3所示的单向1车道交叉路口。
如图3所示,C.Z为临界区(Critical Zone),f
所以,这个切换过程导致的车辆通行损失至少为:2v/ad。
实施例1
如图6所示为本发明公开的一种用于十字交通路口的车流控制方法,包括以下步骤,
步骤1、对十字路口中八个车流顺次编号,并选取任意一个车流作为交通控制的主流,根据所述主流的编号并通过公式(1)、公式(2)和公式(3)计算可与所述主流并行运行的三条支流的编号,所述主流和三条支流形成一个并行流控制包,所述并行流控制包用符号P
其中,b
具体地,如图1所示为现有的交叉路口八车道的车流示意图(注:该交叉路口为最简交通流模型,包括了所有的必需交通流,其他的实际路口都可以通过该模型描述。例如图4,包括了右转交通流。右转交通流始终可以通行不需要控制,所以,可以省略不考虑。再如图5,有两条直行交通流。由于两条直行交通流具有完全相同的通行条件,因此可以视为一条交通流)。将图1所示的十字交叉路口记为
在本实施例中,对十字路口中八个车流按顺时针方向依次编号为0~7,各个车流依次记为f
步骤2、根据所述主流的编号和支流的编号并通过公式(4)获取并行流控制包切换序列表;
其中,
其中:
具体地,步骤2中根据步骤1获得了第一个并行流控制包中主流和支流的编号,并通过公式(4)可以计算获得并行流控制包序列表。该公式的基本思路可由四个条件得出:由
本实施例中以编号为0的交通流作为主流并通过公式(4)获得并行流控制包序列表如图7中所示,并行流控制包序列表中包含多组并行流控制包序列,每个并行流控制包序列中包含八个并行流控制包,在每个并行流控制包中包括一个主流和三个支流。
步骤3、从所述并行流控制包序列表中任意选取一组并行流控制包序列,并依据设置的通行时间规则对十字路口的车流进行控制;具体地,所述通行时间规则具体为:在并行流控制包的控制时间内,保持主流的车流一直通行,同时,在所述并行流控制包的控制时间内,基于等时依次切换规则调整支流的车流通行时间;
具体地,在本实施例中,从所述并行流控制包序列表中任意选取一组并行流控制包序列,如图中所示,选取的并行流控制包序列依次为0:4,5,7,4:0,1,3,1:2,4,5,2:1,6,7,7:0,2,3,3:4,6,7,6:2,3,5以及5:0,1,6,每个并行流控制包中分号前面的数字表示主流的编号,分号后面的三个数字分别表示三个支流的编号。并通过并行流控制包对十字路口的车流进行控制,具体控制过程为,在并行流控制包的控制时间内,本实施例中,假设每个并行流控制包的控制时间为3T,保持主流的车流一直通行,即主流的车流运行时间为3T(控制主流的车流的信号灯为绿灯),同时,在所述并行流控制包的控制时间内,基于等时依次切换规则调整支流的车流通行时间,即三个支流的依次通行时间为T;图7为本实施例中并行流控制包序列进行的车流控制的时序图,该时序图用于控制对应的车流的信号灯;
步骤4、判断当前控制包序列是否完成,若是,返回步骤1。
实施例2
如图6所示为本发明公开的一种用于十字交通路口的车流控制方法,包括以下步骤,
步骤1、对十字路口中八个车流顺次编号,并选取任意一个车流作为交通控制的主流,根据所述主流的编号并通过公式(1)、公式(2)和公式(3)计算可与所述主流并行运行的三条支流的编号,所述主流和三条支流形成一个并行流控制包,所述并行流控制包用符号P
其中,b
具体地,如图1所示为现有的交叉路口八车道的车流示意图(注:该交叉路口为最简交通流模型,包括了所有的必需交通流,其他的实际路口都可以通过该模型描述。例如图4,包括了右转交通流。右转交通流始终可以通行不需要控制,所以,可以省略不考虑。再如图5,有两条直行交通流。由于两条直行交通流具有完全相同的通行条件,因此可以视为一条交通流)。将图1所示的十字交叉路口记为
在本实施例中,对十字路口中八个车流按顺时针方向依次编号为0~7,各个车流依次记为f
步骤2、根据所述主流的编号和支流的编号并通过公式(4)获取并行流控制包切换序列表;
其中,
其中:
具体地,步骤2中根据步骤1获得了第一个并行流控制包中主流和支流的编号,并通过公式(4)可以计算获得并行流控制包序列表。该公式的基本思路可由四个条件得出:由
本实施例中以编号为0的交通流作为主流并通过公式(4)获得并行流控制包序列表如图7中所示,并行流控制包序列表中包含多组并行流控制包序列,每个并行流控制包序列中包含八个并行流控制包,在每个并行流控制包中包括一个主流和三个支流。
图7中只提供了以编号为0的交通流作为主流的并行流控制包序列表,以其它编号为主流可以相应的计算出对应的并行流控制包序列表,本发明中不再一一给出。
步骤3、从所述并行流控制包序列表中任意选取一组控制包序列,并依据设置的通行时间规则对十字路口的车流进行控制;具体地,所述通行时间规则具体为:在并行流控制包的控制时间内,保持主流的车流一直通行,同时,在所述并行流控制包的控制时间内,基于实时交通数据切换规则调整支流的车流通行时间,基于实时交通数据切换规则调整支流的车流通行时间包括:
设并行集
获取所述三条支流的当前车流的流量f′
获取所述三条支流的当前候车长度L′
根据所述当前车流的流量f′
其中:假设f
具体地,在实施例中,当前车流的流量和候车长度可以通过图12所示的方式进行获取,即在十字路口处设置流量计和候车检测器,通过流量计采集当前的车流流量,通过候车检测器采集候车长度;从所述并行流控制包序列表中任意选取一组并行流控制包序列,如图中所示,选取的并行流控制包序列依次为0:4,5,7,4:0,1,3,1:2,4,5,2:1,6,7,7:0,2,3,3:4,6,7,6:2,3,5以及5:0,1,6,每个并行流控制包中分号前面的数字表示主流的编号,分号后面的三个数字分别表示三个支流的编号。并通过并行流控制包对十字路口的车流进行控制,具体控制过程为,在并行流控制包的控制时间内,本实施例中,假设每个并行流控制包的控制时间为3T,保持主流的车流一直通行,即主流的车流运行时间为3T(控制主流的车流的信号灯为绿灯),同时,在所述并行流控制包的控制时间内,三个支流的控制时间T
步骤4、判断当前控制包序列是否完成,若是,返回步骤1。
本方法的有益效果如下:
包式交通流通行方案的优势在于将通行周期内分散的通行时间聚集起来,在通行机会均等的条件下,通过减少引入信号变换后带来的通行开销来达到提高通行量的目的。分析如下。
文献[6]指出图1所示的8个交通流共存在12种安全通行的组合方式。实际上,任何通行方案最终都体现为对这12种组合方式的优化与控制。例如,现实生活中,最常见的信号顺序是沿着顺时针或逆时针的顺序来组织的。图8所示是逆时针顺序组织信号的时序,记为控制方式1。再如,文献[6]设计了两个算法,能够利用无线传感器网络采集的数据来规划12种组合方式的切换顺序,记为控制方式2。
本发明公开的交通流控制方法与控制方式1、2的对比如下。
对比图8、图9与图10的时序,可以得到表1的参数。通过表1,可以清楚地看出,在同样的48T时间内、同样的通行机会(每个交通流6次通行机会,即6个绿灯)情况下,本发明公开的交通流控制方法最大连续通行时间为5T,占比为40/48,而其他方案最大为3T,最大仅为24/48。所以,得出结论:在同样时长、同样通行机会下,本发明公开的交通流控制方法连续通行表现最好。
表1 24个通行单位方案参数对比
注:表1中的T代表一个通行时间单位。
三种控制方式的路口通过量的比较如图11所示。由图11可知,三种方式在车速为40km/s以下时,通过路口车辆大体相等,因此三种方案的性能基本一致;车速大于40km/s时(也就是在道路限速比较高的情况下),本发明公开的控制方式的优势开始显现,控制方式2性能次之,控制方式1性能最差。数据计算可知,本发明公开的控制方式与控制方式1相比,通行量提高约14.29%。
参考文献
[1]Nellore,K.;Hancke,G.P.A Survey on Urban Traffic Management SystemUsing Wireless Sensor Networks[J].Sensors 2016,16(157).
[2]田丰,杜富瑞.基于WSN的智能交通灯控制系统设计[J].测控技术,2009,28(12):56-59.
[3]Jinyang Li,Yuanrui Zhang,Yixiang Chen.A Self-Adaptive TrafficLight Control SystemBased on Speed of Vehicles[C]//2016IEEE InternationalConference on Software Quality,Reliability and Security Companion(QRS-C),Vienna,Austria IEEE,2016.
[4]于杰.考虑公交优先的改进韦伯斯特信号配时模型研究[D].东南大学,2015.
[5]赵雨旸,冯雨芹,杨忠良.信号交叉口Webster法延误计算修正模型[J].黑龙江工程学院学报(自然科学版),2010,24(02).
[6]B.Zhou,J.Cao,X.Zeng,and H.Wu,“Adaptive traffic light control inwireless sensor network-based intelligent transportation system,”in IEEE 72ndVehicular Technology Conference,Ottawa,2010.
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种用于十字交通路口的车流控制方法
- 一种十字路口车流量检测及信号灯智能控制方法