一种用于智能化厨房多功能双机械臂
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及厨房用具,尤其涉及一种用于智能化厨房多功能双机械臂。
背景技术
目前,基于传统烧菜具有一定安全隐患,油烟等对人身体健康有一定影响,而且在炒菜的过程中,人工操作的工作量非常大,因此在一些餐馆的厨房中工作人员较多,造成厨房内工作比较杂乱,对卫生影响比较大。
本发明的目的在于提供一种用于智能化厨房多功能双机械臂,以解决上述背景技术中提出的问题。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种用于智能化厨房多功能双机械臂,通过双机械臂的设计,解决上述背景技术中提出的问题。
(二)技术方案
一种用于智能化厨房多功能双机械臂,包括机械手,所述的机械手顶部活动安装有第一导轨板,所述的第一导轨板底部一侧固定安装有识别摄像头,所述的机械手包括第一机械手分隔体和第二机械手分隔体,所述的第一机械手分隔体包括有第一机械手、第二机械手、第三机械手,所述的第二机械手分隔体包括有第四机械手、第五机械手和第六机械手,所述的第一机械手底部固定安装有炒菜管,所述的第二机械手底部固定安装有清洁棒,所述的第三机械手底部活动安装有第一取物手,所述的第四机械手底部固定安装有汤勺管,所述的第五机械手底部固定安装有取料管,所述的第六机械手底部活动安装有第二取物手,所述的机械手内部包括六个独立机箱,六个机箱分别控制第一机械手、第二机械手、第三机械手、第四机械手、第五机械手和第六机械手。
优选的,所述的第一机械手、第二机械手、第四机械手以及第五机械手均包括有第三十一伸缩块、第三十二伸缩块、第三十三固定块、第三十四球形万向节、第三十五伸缩块、第三十六伸缩块、第三十七伸缩块、第三十八球形万向节、第三十九固定块且依次活动连接,所述的第三机械手和第六机械手均包括有第三十三固定块、第三十四球形万向节、第三十五伸缩块、第三十六伸缩块、第三十四球形万向节且依次活动连接,所述的第一导轨板底部活动安装有第一伸缩箱,所述的第一伸缩箱底部活动连接有第二伸缩箱。
优选的,所述的第一导轨板顶部活动安装有第一轨道板,所述的第一轨道板内部固定安装有第一轨道,所述的第一导轨板两侧均固定安装有双向汽缸,所述的双向气缸一侧固定安装有气缸导轨,所述的第一轨道板顶部固定安装有气缸滑块。
优选的,所述的第一取物手和第二取物手顶部均固定安装有第二轨道板,所述的第二轨道板内部固定开设有第二轨道所述的第一取物手和第二取物手的顶部均活动安装有导轨条。
优选的,所述的第一取物手和第二取物手的内壁外层均固定设有防滑膜。
优选的,所述的炒菜管、取料管以及汤勺管顶端和底端开口处均固定安装有防滑胶。
优选的,所述的机械手主体一侧活动安装有第一机械手分隔体,所述的第一机械手分隔体一侧活动连接有第二机械手分隔体第一机械手分隔体和第二机械手分隔体具有升降功能。
(三)有益效果
本发明提供了一种用于智能化厨房多功能双机械臂,具备以下有益效果:
炒菜的时候,通过设有球形万向节,这样的设置能让这些机械手更加的灵活,这些机械手炒菜、倒料、搅拌以及倒菜的时候,通过设有球形万向节,连接球形万向节的部件会更加的灵活,可以进行90°全方面的旋转,通过双向气缸、气缸导轨以及气缸滑块,使该机械手可以横纵向反复移动,机械手横向移动时,达到指定位置后,会再自动进行纵向移动,移动到锅炉上方,来进行清洗或者炒菜工作,炒完菜之后,会自动进行清理工作,清理工作完成后,才会自动复位,复位的时候,首先纵向靠墙贴近,达到指定位置后,再会进行横向复位,这样的机械手具有更强的灵活性,不再仅仅拘束于横向移动。
附图说明
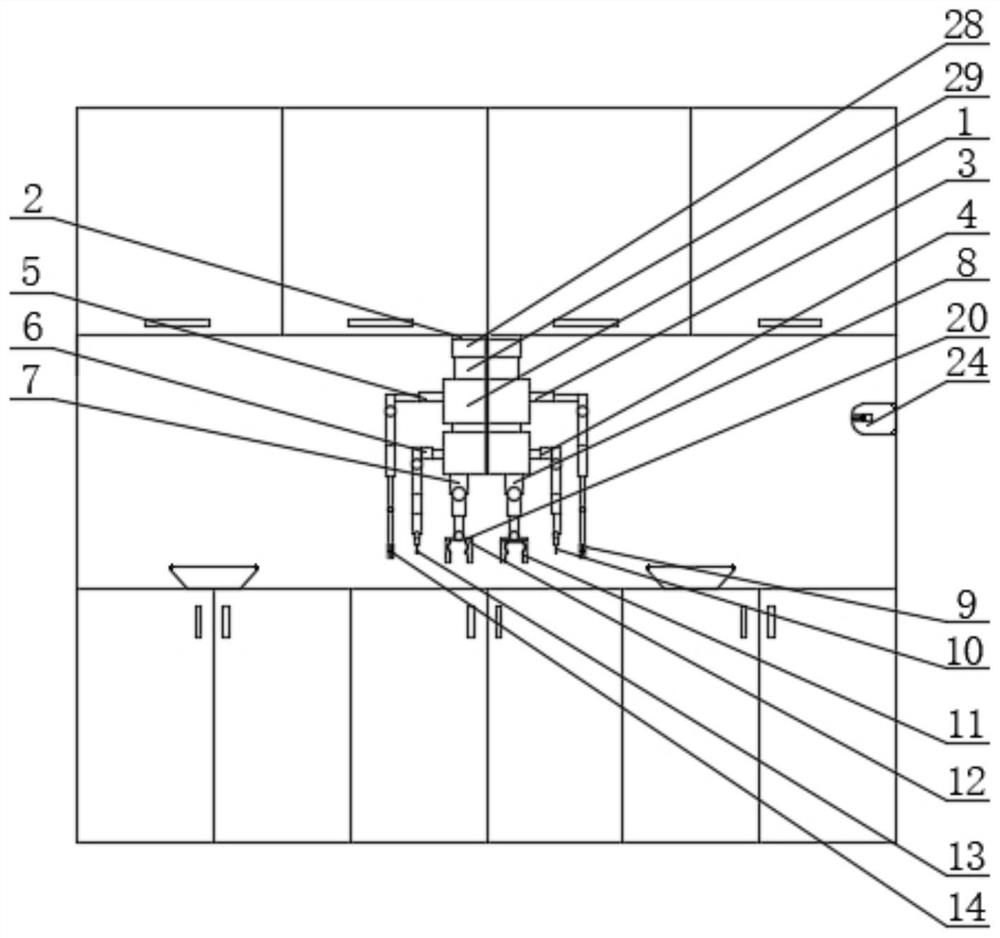
图1为本发明一种用于智能化厨房多功能双机械臂前视示意图;
图2为本发明一种用于智能化厨房多功能双机械臂立面示意图;
图3为本发明一种用于智能化厨房多功能双机械臂炒菜管立体示意图。
图4为本发明一种用于智能化厨房多功能双机械臂顶部轨道立体示意图。
图5为本发明一种用于智能化厨房多功能双机械臂第一取物手顶部轨道立体示意图。
图6为本发明一种用于智能化厨房多功能双机械臂第一取物手立体示意图。
图中:1、机械手电箱;2、第一伸缩轴;3、第一机械手;4、第二机械手;5、第四机械手;6、第五机械手;7、第六机械手;8、第三机械手;9、炒菜管;10、清洁棒;11、第一取物手;12、第二取物手;13、取料管;14、汤勺管;15、第一轨道板;16、第一轨道;17、第二轨道;18、导轨条;19、防滑膜;20、第二轨道板;21、防滑胶;22、第一机械手分隔体;23、第二机械手分隔体;24、识别摄像头;25、气缸滑块;26、气缸导轨;27、双向气缸;28、第一伸缩箱;29、第二伸缩箱;31、第三十一伸缩块;32、第三十二伸缩块;33、第三十三固定块;34、第三十四球形万向节;35、第三十五伸缩块;36、第三十六伸缩块;37、第三十七伸缩块;38、第三十八球形万向节;39、第三十九固定块;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:一种用于智能化厨房多功能双机械臂,包括机械手1,所述的机械手顶部活动安装有第一导轨板2,所述的第一导轨板2底部一侧固定安装有识别摄像头24,所述的机械手1包括第一机械手分隔体22和第二机械手分隔体23,所述的第一机械手分隔体22包括有第一机械手3、第二机械手4、第三机械手8,所述的第二机械手分隔体23包括有第四机械手5、第五机械手6和第六机械手7,所述的第一机械手3底部固定安装有炒菜管9,所述的第二机械手4底部固定安装有清洁棒10,所述的第三机械手8底部活动安装有第一取物手11,所述的第四机械手5底部固定安装有汤勺管14,所述的第五机械手6底部固定安装有取料管13,所述的第六机械手7底部活动安装有第二取物手12,所述的机械手1内部包括六个独立机箱,六个机箱分别控制第一机械手3、第二机械手4、第三机械手8、第四机械手5、第五机械手6和第六机械手7。
优选的,第一机械手3、第二机械手4、第四机械手5以及第五机械手6均包括有第三十一伸缩块31、第三十二伸缩块32、第三十三固定块33、第三十四球形万向节34、第三十五伸缩块35、第三十六伸缩块36、第三十七伸缩块37、第三十八球形万向节38、第三十九固定块39且依次活动连接,第三机械手8和第六机械手7均包括有第三十三固定块33、第三十四球形万向节34、第三十五伸缩块35、第三十六伸缩块36、第三十四球形万向节34且依次活动连接,第一导轨板2底部活动安装有第一伸缩箱28,所述的第一伸缩箱28底部活动连接有第二伸缩箱29,本设置中:通过设置有第一机械手3、第二机械手4、第四机械手、第五机械手6、第三机械手7以及第六机械手7,这些机械手里每个都设置有球形万向节34和第三十一伸缩块31,这样的设置能让这些机械手更加的灵活,这些机械手取物、洗菜、炒菜、倒料、搅拌、倒菜以及清洗的时候,通过设有球形万向节34,连接球形万向节34的部件会更加的灵活,可以进行90°全方面的旋转,通过设有第三十一伸缩块31,使连接第三十一伸缩块31的部件会更加的快捷方便,如果炒菜的时候,该机械手到达锅炉上方,但是机械手长度不够,够不着锅炉,那么第三十一伸缩块31就可以起到作用了,它可以使机械手的手更长,且因为有球形万向节的作用下,会更加的灵活,且通过第一伸缩箱28和第二伸缩箱29,使该机械手整体可以升降,这样进行工作的话会更加的自如。
优选的,第一导轨板2顶部活动安装有第一轨道板15,第一轨道板15内部固定安装有第一轨道16,第一导轨板15两侧均固定安装有双向汽缸27,双向气缸27一侧固定安装有气缸导轨26,第一轨道板15顶部固定安装有气缸滑块25,本设置中:通过双向气缸27、气缸导轨26以及气缸滑块25,使该机械手1可以横纵向反复移动,机械手1通过第一轨道板15进行横向移动,达到指定位置后,第一轨道板15通过气缸滑块25,在气缸导轨26上进行纵向移动,移动到锅炉上方,来进行清洗或者炒菜工作,炒完菜之后,会自动进行清理工作,清理工作完成后,才会自动复位,复位的时候,首先纵向靠墙贴近,达到指定位置后,再会进行横向复位,这样的机械手1具有更强的灵活性,不再仅仅拘束于横向移动。
优选的,第一取物手11和第二取物手12顶部均固定安装有第二轨道板20,第二轨道板20内部固定开设有第二轨道17第一取物手11和第二取物手12的顶部均活动安装有导轨条18,第一取物手11和第二取物手12的内壁外层均固定设有防滑膜19,本设置中:通过第二轨道板20和第二轨道17以及轨道条18的设置,使该第一取物手1更加灵活,在抓取不同大小的碗碟时,第一取物手11两侧会靠近或者松开,以此来达到抓取不同碗碟或其他物品,且抓取到了之后,会自动靠近紧贴物品,且第一取物手11和第二取物手没有固定的抓取物品限制,第一取物手11和第二取物手前端的平面夹板,可以抓取锅盖,可以抓取锅的边缘去倒菜,可以抓取没洗的菜去清洗,这样的抓取方式更具有多面性,不会像其他的机械手只能抓取固定的物品。
优选的,第一取物手11和第二取物手12的内壁外层均固定设有防滑膜19,本设置中:通过设置防滑膜19,使第一取物手11和第二取物手12的整个内部都具备防滑性,抓取物品不会因为滑落的原因而脱落,且通过设置防滑膜19,使取物手不仅仅只是局限于抓取碗碟,例如,取物手抓取锅炉的边缘时,不会因为锅炉的边缘的弧度和滑而影响该取物手,这样的设置会使取物手抓取物品的时候会更加全面化。
优选的,炒菜管9、取料管13以及汤勺管14顶端和底端开口处均固定安装有防滑胶22,本设置中:通过设置防滑胶22,因为防滑胶22的作用,使炒菜管、取料管13以及汤勺管14装好菜铲、汤勺以及勺子后,不会因为不紧固或者滑落的原因而脱落。
优选的,机械手1主体一侧活动安装有第一机械手分隔体22,所述的第一机械手分隔体22一侧活动连接有第二机械手分隔体23第一机械手分隔体22和第二机械手分隔体23具有升降功能,本设置中:通过设置识别摄像头24来对第一机械手分隔体22和第二机械手分隔体23进行工作安排,可以使该机械手1可以进行分离,第一机械手分隔体22可以负责炒菜或煲汤,第二机械手23分隔体可以负责清洗或者倒菜,且该机械手可以通过识别摄像头24来进行升降,这样的设置更加人性化。
综上所述,本发明在炒菜情况下,通过摄像头识别功能,机械手系统会自动分离或者不分离,分离的情况下,通过识别功能进行调整机械手主体的高低问题,然后再进行炒菜,在第一机械手在装好菜铲后,第一机械手通过第三十一伸缩块和第三十四球形万向节来到炒锅上方进行炒菜,第五机械手在安装好汤勺后,通过第三十一伸缩块和第三十四球形万向节使第五机械手来到汤锅的上方来进行搅拌,第五机械手在安装好取料勺后,通过第三十一伸缩块和第三十四球形万向节使第五机械手可以达到取料加料的过程,第二机械手在安装好清洁球后,通过第三十一伸缩块和第三十四球形万向节使该第二机械手可以达到清理的功效,第三机械手和第四机械手在抓取的过程,通过底部滑轮的设置,在抓取物品时,物品的大小会使该机械手会自动收拢或松开,通过自动炒菜、自动取物、自动倒菜、自动分离、自动升降、自动清洗以及自动加料取料这些设置,使该机械手更加智能化。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种用于智能化厨房多功能双机械臂
- 一种用于螺丝安装的高精度智能化机械臂及其工作方法