一种可爬楼梯的清扫机器人
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及技术领域,尤其是涉及一种可爬楼梯的清扫机器人。
背景技术
现如今各种高楼大厦、居民住宅区等建筑越来越多,导致了对楼道的清洁作业也更加繁重。为了从枯燥无味的清洁工作中解脱出来,越来越多的清洁机器人走进了人们的日常生活。市面上大多数扫地机器人只能进行平面清扫,面对复式家庭的楼梯,以及高楼大厦,只能缴械投降。近年来国内外都在不断的研发楼梯清洁机器就人,但这些机器人大多复杂昂贵。
发明内容
为了克服现有技术存在的缺陷,本发明提供了一种结构简单、操作方便、占地面积小、成本低的可爬楼梯的清扫机器人。
本发明解决其技术问题所采用的技术方案是:
一种可爬楼梯的清扫机器人,包括机器人主体、两个用于爬楼梯的抬升装置、用于清扫和吸尘的清扫装置、用于检测楼梯左右边界的触须传感器、用于检测楼梯边沿的超声波传感器以及控制系统,两个抬升装置分别安装在机器人主体的前后两侧上并且同步进行抬升工作,所述清扫装置安装在机器人主体的底部,所述机器人主体的左右两侧上分别设有触须传感器,所述超声波传感器设置在机器人主体后侧面底部,所述机器人主体的底部还设有四个定向动力轮,用于机器人主体在楼梯上左右行进,每个定向动力轮与一个直流减速电机连接;
所述抬升装置包括升降机构和前后移动单元,前后移动单元安装在升降机构上,所述升降机构包括步进电机、丝杆、螺母、两根滑杆和两个滑块,所述丝杆竖向安装在机器人主体上,所述螺母通过螺母座安装在丝杆上并且与丝杆形成上下移动副,两根滑杆分别设置在丝杆的左右两侧并且安装在机器人主体上,两个滑块分别安装在丝杆上并且与丝杆形成上下滑动副;所述前后移动单元包括两个轮子和升降台,所述升降台是一个倒T形支撑杆,两个轮子分别安装在倒T形支撑杆的下部横杆左右两侧上,每个轮子与一个直流减速电机连接,直流减速电机安装倒T形支撑杆的底部上,倒T形支撑杆的上部竖杆通过连接件同时与螺母座、滑块连接;设置在机器人主体前侧的倒T形支撑杆的竖杆短于设置在机器人主体后侧的倒T形支撑杆的竖杆;
所述清扫装置包括四个清扫机构和一个吸尘机构,四个清扫机构两两一组对称安装在机器人主体底部的左右两侧,所述吸尘机构设置在四个清扫机构之间;
所述抬升装置、清扫装置、触须传感器、超声波传感器、定向动力轮的直流减速电机分别与控制系统连接。
进一步,所述清扫机构包括直流减速电机、扫刷和直角支架,所述直流减速电机通过直角支架安装在机器人主体上,所述扫刷安装在直流减速电机的输出轴上;
所述吸尘机构包括吸尘盒、吸尘电机和吸尘扇叶,所述吸尘盒安装在机器人主体内部,用于存储灰尘,所述吸尘电机安装在吸尘盒的进尘口,所述吸尘扇叶安装在吸尘电机的输出轴上,所述吸尘电机为直流减速电机,与四个定向动力轮连接的驱动电机也为直流减速电机。
再进一步,所述控制系统包括Arduino单片机、步进电机驱动器、直流电机驱动器和电源,所述触须传感器和超声波传感器分别与所述Arduino单片机连接,所述Arduino单片机通过步进电机驱动器与步进电机连接,并且通过直流电机驱动器与直流减速电机连接,所述单片机、步进电机驱动器、直流电机驱动器安装在机器人主体内部,所述电源包括7.4V直流锂电电源和11.1V直流锂电电源。
本发明的有益效果主要表现在:操作简单,使用方便,只需操作按钮就可以使用;采用前后同步抬升装置,抬升装置采用丝杠升降,体积小、噪音小,能够按照一定程序准确地控制调整或推进的高度,爬楼梯时能够始终保持机器人主体水平状态,重心始终保持在支撑范围内,爬楼过程更加稳定;采用步进电机在不旋转时锁定,确保了机构的稳定性与可靠性;采用传感器检测楼梯的边界和边沿,做出相应的反应,自动化程度高,实用性强。
附图说明
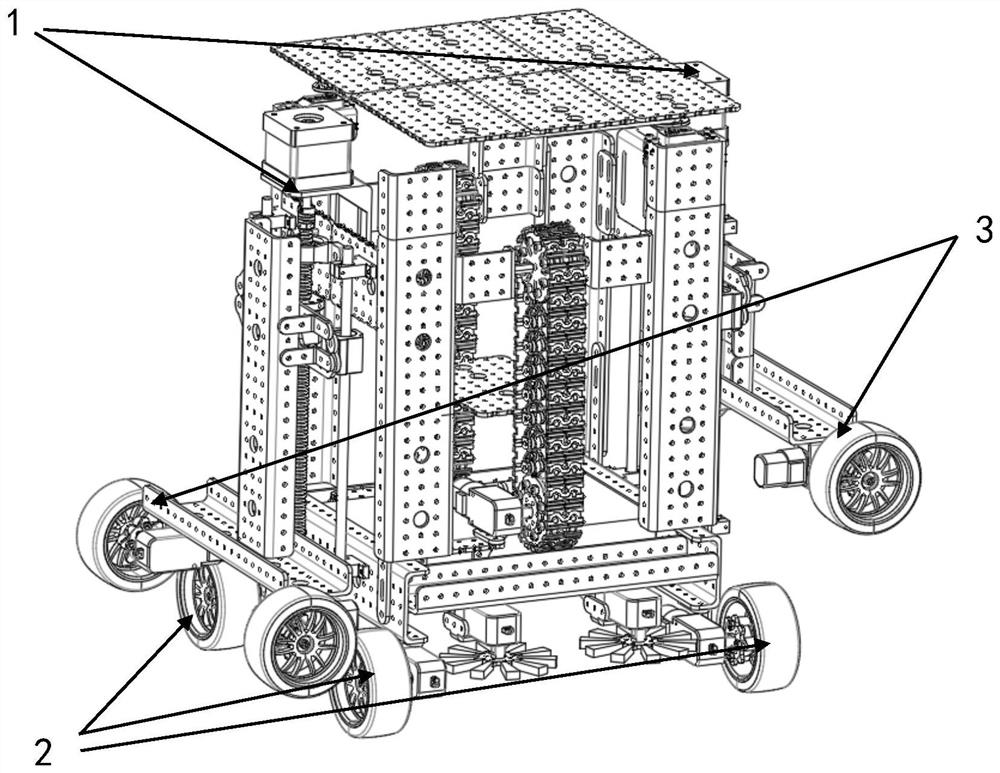
图1是本发明的结构示意图。
图2是机器人主体后侧的前后移动单元的结构示意图。
图3是机器人主体前侧的前后移动单元的结构示意图。
图4是升降机构的结构示意图。
图5是清扫装置的结构示意图。
图6是机器人爬楼过程简图。
具体实施方式
下面结合附图对本发明作进一步描述。
参照图1~图6,一种可爬楼梯的清扫机器人,包括机器人主体、两个用于爬楼梯的抬升装置、用于清扫和吸尘的清扫装置、用于检测楼梯左右边界的触须传感器、用于检测楼梯边沿的超声波传感器以及控制系统,两个抬升装置分别安装在机器人主体的前后两侧上并且同步进行抬升工作,所述清扫装置安装在机器人主体的底部,所述机器人主体的左右两侧上分别设有触须传感器,所述超声波传感器设置在机器人主体后侧面底部,所述机器人主体的底部还设有四个定向动力轮2,用于机器人主体在楼梯上左右行进,每个定向动力轮与一个直流减速电机连接;
所述抬升装置包括升降机构1和前后移动单元3,前后移动单元3安装在升降机构1上,所述升降机构1包括步进电机4、丝杆5、螺母、两根滑杆6和两个滑块7,所述丝杆5竖向安装在机器人主体上,所述螺母通过螺母座安装在丝杆5上并且与丝杆5形成上下移动副,两根滑杆6分别设置在丝杆5的左右两侧并且安装在机器人主体上,两个滑块7分别安装在丝杆5上并且与丝杆5形成上下滑动副;所述前后移动单元3包括两个轮子3和升降台,所述升降台是一个倒T形支撑杆8,两个轮子3分别安装在倒T形支撑杆8的下部横杆左右两侧上,每个轮子与一个直流减速电机9连接,直流减速电机9安装倒T形支撑杆8的底部上,倒T形支撑杆8的上部竖杆通过连接件同时与螺母座、滑块7连接;设置在机器人主体前侧的倒T形支撑杆的竖杆短于设置在机器人主体后侧的倒T形支撑杆的竖杆;
所述清扫装置包括四个清扫机构10和一个吸尘机构11,四个清扫机构10两两一组对称安装在机器人主体底部的左右两侧,所述吸尘机构11设置在四个清扫机构10之间;
所述抬升装置、清扫装置、触须传感器、超声波传感器、定向动力轮的直流减速电机分别与控制系统连接。
进一步,所述清扫机构10包括直流减速电机12、扫刷13和直角支架,所述直流减速电机12通过直角支架安装在机器人主体上,所述扫刷13安装在直流减速电机12的输出轴上;
所述吸尘机构11包括吸尘盒、吸尘电机和吸尘扇叶,所述吸尘盒安装在机器人主体内部,用于存储灰尘,所述吸尘电机安装在吸尘盒的进尘口,所述吸尘扇叶安装在吸尘电机的输出轴上,所述吸尘电机为直流减速电机,与四个定向动力轮连接的驱动电机也为直流减速电机。
再进一步,所述控制系统包括Arduino单片机、步进电机驱动器、直流电机驱动器和电源,所述触须传感器和超声波传感器分别与所述Arduino单片机连接,所述Arduino单片机通过步进电机驱动器与步进电机连接,并且通过直流电机驱动器与直流减速电机连接,所述单片机、步进电机驱动器、直流电机驱动器安装在机器人主体内部,所述电源包括7.4V直流锂电电源和11.1V直流锂电电源。11.1V直流锂电电源为抬升装置和底部行走的轮子使用,7.4V直流锂电电源为其余部件供电使用。
机器人主体包括用于盛装垃圾的垃圾桶,该垃圾桶可以是翻盖并且可自动倾倒垃圾的桶。
如图2、图3所示,所述位于主体前后侧的抬升装置1前后安装在机器人主体上,并可以上下滑动;倒T形支撑杆的竖杆通过螺母座与升降机构组合在一起,而横杆可以加大支撑距离,从而提高机器人爬楼时的稳定性,所述倒T形支撑杆可以随螺母座一起上下移动。安装在机器人主体前侧的前后移动单元的倒T形支撑杆的竖杆短一些。
如图5所示,所述扫刷13可以直流减速电机12转动,对地面进行清扫。直角支架用于连接机器人主体和直流减速电机12,吸尘扇叶随电机转动达到吸尘效果。
如图6所示,a为楼梯台阶的宽,b楼梯台阶的高,机器人抬升装置的前后轮的距离小于台阶的宽度a,这样机器人才能在楼梯上行走,而不与楼梯发生干涉;机器人前后支撑杆的运动同步,这样才能保证机器人始终保持水平,而不会倾倒;前后支撑杆设计时,它们的行程都应大于楼梯的高度b,这样才能保证机器人能够爬上楼梯。
本发明的工作过程为:
机器人的抬升装置启动,前后倒T形支撑杆同时向下运动,当前后共四个轮子同时接触到上下两级台阶,机器人主体将被抬起,当安装在机器人底盘下的四个定向动力轮高于上一级台阶面时,前后移动单元3将启动,机器人向前移动,将机器人主体的投影面移动至上一级台阶,由检测楼梯边沿的超声波传感器检测,而前后移动单元3停止工作,升降机构1反向工作,机器人主体下降,当机器人底部接触到上一级台阶以后,升降机构1停止工作,一级台阶爬楼完成。在此过程中,触须传感器一直处于工作状态,保证机器人在楼梯台阶上。
以上所述仅为本发明的较佳实施例,并未限制本发明的专利范围,利用本发明说明书及附图内容所述结构,直接或间接运用在其他相关的技术领域,均应包括在本发明的专利保护范围内。
- 一种可爬楼梯的清扫机器人
- 一种可爬楼清扫机器人