用于智能物联制造系统的加工装备切削颤振能量采集电路
文献发布时间:2023-06-19 11:39:06
技术领域
本发明属于智能物联制造系统的加工装备切削颤振能量采集领域,涉及一种能量采集电路,特别涉及一种用于智能物联制造系统的加工装备切削颤振能量采集电路和方法。
背景技术
制造业是国民经济的物质基础和产业主体,是衡量国民经济发展的重要标志。随着经济全球化进程的加快以及市场经济的深入发展,制造型企业面临的市场竞争日趋激烈。离散制造尤其是多品种、小批量、多批量、多型号并举生产正成为主流的生产方式。面向多品种、小批量、多批量、多型号并举离散制造过程极为复杂,且由于单件小批量生产,其批量少重复率低,实际生产过程中呈现出①生产组织活动复杂;②生产连续性和负载均衡性差;③生产周期难以控制;④生产过程扰动因素多,使得离散制造过程中加工装备的数据信息难以及时获取和上传。在此背景下,一方面对于制造系统的柔性可重构和生产能力要求持续增长,另一方面制造过程的可预见性却持续下降。因此,如何快速有效地获取车间现场加工装备的数据信息使生产控制系统与生产过程同步是当前离散制造企业必须考虑的一个关键问题。
目前,绝大部分有一定规模的制造企业均采用无线传感网络作为智能感知层的关键技术,在离散制造车间生产现场根据生产需要,在加工装备的相应位置部署智能感知节点,节点之间通过无线通讯方式形成一个自组织网络,主动获取生产全过程中加工装备的数据信息,最终把数据信息发给网关或者中央处理器。
无线传感器网络用于获取生产全过程中加工装备的数据信息时, 无线传感网络节点一般采用电池供电、有线供电。电池供电有自己的缺点,①当电池电量不足、泄漏或接触不良时,网络节点的通信灵敏度、通信距离都大大降低,严重时甚至通信失灵,因此需要经常更换电池,或对电池充电,增加了使用成本;②电池含有重金属,废旧电池处理不当会造严重的环境污染;有线供电有自己的缺点,①投资成本高。有线供电必须布置电缆,一旦离散制造车间及加工装备数量较多,布线相当困难,需要大量的人力和物力,建设时间长。②扩展性差。在建好一个无线传感器网络之后,常常因为系统的需要增加新的节点。便需要重新布线,施工比较麻烦,而且还有可能破坏原来的供电线路。③难以检查和维修。出现故障时,需沿供电线路及智能感知节点检查,一般很难及时找出故障点。④对于多节点无线传感器网络,显得笨重且冗余,移动性极差。离散制造企业拥有许多类别的车间,各类加工装备的位置关系非常复杂,且还有一些处于不断移动状态的AGV小车等设备。在这样的制造环境中进行节点的有线供电将无法与车间生产环境相匹配。
加强制造业绿色改造升级,积极推进低碳化、循环化和集约化,提高制造业资源利用效率,努力构造高效清洁低碳的循环绿色制造体系。绿色制造通过有害源的反利用、新能源的应用,实现轻量化、资源循环。绿色制造将围绕全生命周期重点开展清洁生产、有害源的反利用、新能源回收再利用等关键技术研发。智能物联制造系统的加工装备切削过程中产生的颤振具有以下危害:①使得工件和刀具之间会在其表面出现一些振痕,降低工件的精度及影响使用性能;②在加工过程中,导致刀具以及机床内部零件过度疲劳损坏,大大降低了刀具的使用寿命以及机床的工作效率,严重时,造成机床无法正常工作;③影响刀具和机床的使用性能,降低加工效率。
依据绿色理念需将离散制造车间加工装备产生的危害源--颤振能进行反利用,利用“能量采集”的原理,将颤振能转化为电能,与智能制造中感知层的无线传感器网络技术相结合,实现智能感知节点的无线供电,在减轻和消除颤振所带来的各种不良影响的同时,降低能源的耗损,延长机床和刀具的寿命,提高制造业能源利用效率,产生较大的经济收益,实现绿色经济。
对颤振能量的采集和转换主要存在四种方式:静电式、电磁式、压电式及磁致伸缩式。相对于静电式、电磁式、磁致伸缩式,压电振动发电具有结构简单,能量密度高,不需要额外庞大的配件(如线圈、永磁体等),可与微机电系统(MEMS,Micro-Electro-MechanicalSystem)加工工艺兼容等优点,在不需要任何启动电压的情况下可直接利用振动产生的电动势,因此对长期处于工作状态的结构健康监测系统、无线节点监控系统而言,显著增强了可靠性。
智能物联制造系统的加工装备切削颤振使能量采集装置输出的电压是交变的,而微型电子设备(智能感知节点)需要的是稳定的直流电压,所以,在能量采集装置与智能感知节点之间需要设计能量采集电路。通常,能量采集装置与全桥整流电路(SEH)连接,但是全桥整流电路直接用于发电系统的效果并不理想,由于压电振子的内部夹片电容C
发明专利“微能量控制采集电路”(CN103580290B),提出的微能量采集电路仅包括整流滤波模块,实现了交流电压-直流电压的转换,输出接近平滑的直流电压,但仍然存在电压波动,输入电压或电流的微小波动,均会引起输出电压的变化,而大多数用电设备(例:智能感知节点)只在稳定的直流电压下才工作。所以,该电路的输出电压无法满足为智能感知节点供电的要求。
论文“一种自感知型电感同步开关能量采集电路”,提出的并联电感同步开关压电能量采集电路,仅依靠模拟电路即可完成检测和控制,避免了对外界设备和能量的依赖。依靠压电片输出电压的峰值检测与比较,自动控制开关的闭合时机,显著提高能量采集效率,但是该电路的输出电压存在波动,当输入电压或电流的微小波动,均会引起输出电压的变化,无法实现为智能感知节点供电的目的。
综上分析可知,现阶段需对离散制造车间加工设备运行过程中产生的危害源--颤振能进行反利用,依据能量采集原理,使用能量采集装置将颤振能转换为交流电能,再设计能量采集电路将此交流电能转换为连续稳定的直流电压,为无线传感网络中的智能感知节点供电,实现绿色制造与智能制造的结合。
发明内容
本发明针对能量采集装置采集到的智能物联制造系统的加工装备运行过程中的颤振能,对采集到的能量能进行交流-直流的转化,并对转化后的直流电压进行稳压,获得连续、稳定的5V直流电压,为智能感知节点供电。
在一个方面,提供一种用于智能物联制造系统的加工装备切削颤振能量采集电路,所述的用于智能物联制造系统的加工装备切削颤振能量采集电路包括:极值检测电路,所述极值检测电路包括正极值检测电路、负极值检测电路及第一电感,用于检测压电振子输出电压的正负极值;整流滤波电路,所述整流滤波电路包括整流桥及滤波电容,用于控制输出电压的稳定性;稳压电路,所述稳压电路包括三极管、稳压二极管和电阻,用于为超级电容提供稳定的电压;存储及负载电路,所述存储及负载电路包括超级电容及负载电阻,用于为智能感知节点提供持续且稳定的电压;以及压电振子的等效电路,所述压电振子的等效电路包括交流源及电容,用于模拟真实的压电振子工作状态。
根据一些示例性的实施例,所述正极值检测电路包括包络检测器、比较器和自供能电子开关,所述正极值检测电路的包络检测器包括第一电阻、第一二极管和第一极值检测电容,所述正极值检测电路的比较器包括第一PNP管和第二二极管,所述正极值检测电路的自供能电子开关包括第三二极管和第一NPN管。
根据一些示例性的实施例,所述负极值检测电路包括包络检测器、比较器及自供能电子开关,所述负极值检测电路的包络检测器第二电阻、第六二极管和第二极值检测电容,所述负极值检测电路的比较器包括第二NPN管和第五二极管,所述负极值检测电路的自供能电子开关包括第四二极管和第二PNP管。
根据一些示例性的实施例,所述第一电阻的一端、第一PNP管的基极、第三二极管的正极、第四二极管的负极、第二NPN管的基极、第二电阻的一端及整流桥的输入端连接,所述第一电阻的另一端、第一二极管的正极、第一检测电容的一端及第一PNP管的发射极连接,所述第一PNP管的集电极与第二二极管的正极连接,所述第二二极管的负极与第一NPN管的基极连接,所述第三二极管的负极与第一NPN 管的集电极连接,所述第四二极管的正极与第二PNP管的集电极连接,所述第二PNP管的发射极与第五二极管的正极连接,所述第五二极管的负极与第二NPN管的集电极连接,所述第六二极管的正极、第二检测电容的一端及第二NPN管的发射极连接,所述第一NPN管的发射极、第二PNP管的发射极及第一电感的一端连接,所述第一电感的另一端、第一检测电容的另一端及第二检测电容的另一端连接。
根据一些示例性的实施例,所述整流滤波电路包括整流桥电路和滤波电容;以及所述第一电阻的一端、第一PNP管的基极、第三二极管的正极、第四二极管的负极、第二NPN管的基极、第二电阻的一端及整流桥的输入端连接,所述第一电感的另一端、第一检测电容的另一端、第二检测电容的另一端及整流桥的另一输入端极连接,所述整流桥的输出正极与滤波电容的一端相连接,所述整流桥的输出负极与滤波电容的另一端连接。
根据一些示例性的实施例,所述稳压电路包括第三NPN管、第一稳压二极管和保护电阻;以及所述整流滤波电路的输出正极、保护电阻的一端及第三NPN管的集电极连接,所述第三NPN管的基极、保护电阻的另一端及稳压二极管的负极连接,所述整流滤波电路的输出负极与第一稳压二极管的正极连接。
根据一些示例性的实施例,所述存储及负载电路包括超级电容和负载电阻,所述第三NPN管的发射极、超级电容的一端及负载电阻相连接,所述稳压二极管的正极、超级电容的另一端及负载电阻的另一端连接。
根据一些示例性的实施例,所述压电振子的等效电路包括交流电流源和夹片电容;以及所述交流电流源的一端、夹片电容的一端及第一电阻的一端连接,所述交流电流源的另一端、夹片电容的另一端及第一电阻的另一端连接。
在另一方面,提供一种用于智能物联制造系统的加工装备切削颤振能量采集方法,其特征在于,所述方法包括以下步骤:
步骤一:利用正极值检测电路、负极值检测电路及第一电感构建极值检测电路,检测压电振子输出电压的正负极值;
步骤二:利用整流桥及滤波电容构建整流滤波电路,控制输出电压的稳定性;
步骤三:利用三极管、稳压二极管、电阻构建稳压电路,为超级电容提供稳定的电压;
步骤四:利用超级电容及电阻构建存储及负载电路,为智能感知节点提供持续、稳定的电压;以及
步骤五:利用交流源及电容构建压电振子的等效电路,模拟真实的压电振子工作状态。
在又一方面,提供一种用于智能物联制造系统的加工装备切削颤振能量采集方法,其中,所述方法利用上述的用于智能物联制造系统的加工装备切削颤振能量采集电路。
相比于现有技术,本发明的实施例提供的技术方案具有如下有益效果:
(1)本发明可通过调节用于智能物联制造系统的加工装备切削颤振能量采集电路的最终负载值及稳压二极管的值,给智能感知节点提供连续、稳定的直流电压。
(2)本发明的稳压电路,实现当压电振子的输出电流产生不正常的变动时,用于智能物联制造系统的加工装备切削颤振能量采集电路的输出不受影响,依然为连续、稳定的直流电压。
(3)本发明的稳压电路,实现放大输出负载电流,增加用于智能物联制造系统的加工装备切削颤振能量采集电路的负载能力。
(4)本发明的用于智能物联制造系统的加工装备切削颤振能量采集电路是完全自启动、自供电的,能够持续对所处环境中的切削颤振能进行采集,提高了整体电路的能量采集效率,且降低了使用成本。
(5)本发明实现了对智能感知节点的无线供电,益处为:①投资少。应用中无需布置电缆,节省大量的人力、物力。②扩展性强。无线传感器网络中节点的增删,只需将增加或删除的节点与传感器网络之间建立或断开通讯即可,无需重新布置电缆。③检查和维护易实现,省时省力。有线供电时,一旦出现故障需对供电线路及智能感知节点进行检查,一般很难及时找出故障点;采用无线供电方式,仅需检查智能感知节点,方便快捷,可快速恢复网络通讯。④适应性强。可适应制造企业多类别车间、加工装备的复杂位置关系及处于不断移动状态的设备的生产环境。⑤建设工程周期短,安装简单快捷。当要在多个制造车间组建无线传感器网络时,采用有线供电方式,在传感节点布置完成后需要进行电缆的布置,而采用无线供电方式,仅需对传感节点进行布置,相比之下,无线供电方式可以快速组建传感网络,工程周期大大缩短。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
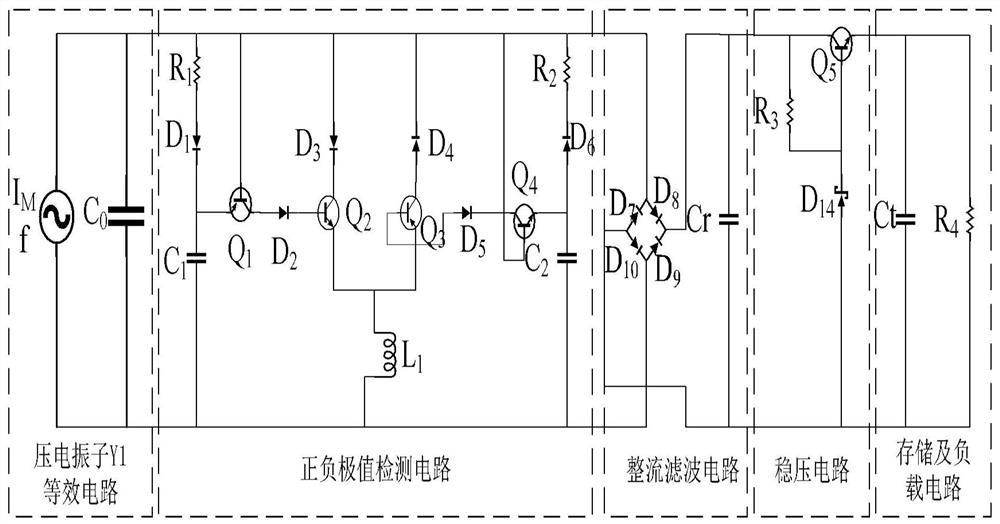
图1为根据本发明的实施例的方法中涉及到用于智能物联制造系统的加工装备切削颤振能量采集电路仿真原理图;
图2为根据本发明的实施例的方法中涉及到的极值检测电路原理图;
图3为根据本发明的实施例的方法中涉及到的电路整流滤波电路原理图;
图4为根据本发明的实施例的方法中涉及到的稳压电路原理图;
图5为根据本发明的实施例的方法中涉及到的存储及负载电路原理图;
图6为根据本发明的实施例的方法中涉及到的自然充电阶段极值检测电路工作原理图;
图7为根据本发明的实施例的方法中涉及到的压电电压第一次翻转阶段,极值检测电路的工作原理图;
图8为根据本发明的实施例的方法中涉及到的压电电压第二次翻转阶段,极值检测电路的工作原理图;
图9为根据本发明的实施例的方法中涉及到的电荷中和阶段,极值检测电路的工作原理图;
图10为根据本发明的实施例的方法中涉及到的正半周期整流滤波电路工作原理图;
图11为根据本发明的实施例的方法中涉及到的负半周期整流滤波电路工作原理图;
图12为根据本发明的实施例的方法中涉及到的用于智能物联制造系统的加工装备切削颤振能量采集电路输出电压波形;
图13为根据本发明的实施例的方法中涉及到的压电振子等效电路模型;以及
图14为根据本发明的实施例的方法中涉及到的用于智能物联制造系统的加工装备切削颤振能量采集电路理论波形。
具体实施方式
为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本公开保护的范围。
除非另外定义,本公开使用的技术术语或者科学术语应当为本领域普通技术人员所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚、明白,以下结合附图,对本发明进行进一步详细说明。
如图1所示,本公开的实施例提供了一种用于智能物联制造系统的加工装备的切削颤振能量采集电路。所述切削颤振能量采集电路包括极值检测电路、整流滤波电路、稳压电路和存储及负载电路。
参照图1和图2,所述极值检测电路包括正极值检测电路、负极值检测电路及第一电感L
在本公开的实施例中,所述极值检测电路具体工作步骤如下。
在步骤1.1中,对极值检测电容充电。从零时刻开始施加正弦位移激励,随着位移的增加,压电振子的电压从零开始增加。此时电流的回路为如图6中箭头所示,所有三极管均断开,除了两个包络检测电路导通,并对第一极值检测电容C
在步骤1.2中,第一次翻转压电电压。压电振子开路电压到达最大值时,位移激励开始减小,然后压电振子开路电压从最大值开始减小,之后第一PNP管Q
在步骤1.3中,第二次翻转压电电压。通过第一电感L
在步骤1.4中,电荷中和。电流的路径如图9中箭头所示,第二次电压翻转后,第一NPN管Q
参照图1和图3,所述整流滤波电路包括整流桥电路、滤波电容 Cr。所述极值检测电路中的第一电阻R
例如,所述整流滤波电路的整流桥电路可以包括四个二极管D
在本公开的实施例中,所述整流滤波电路可以按照以下步骤工作。
在步骤2.1中,在正半周期时,D
在步骤2.2中,在负半周期时,D
在步骤2.3中,整流桥电路利用二极管正向导通反向截止的特性,在谐振回路断开期间,进行交流-直流的转换,将第一电感L
结合参照图1和图4,所述稳压电路可以包括三极管、稳压二极管和电阻。例如,所述稳压电路包括第三NPN管Q
在本公开的实施例中,所述稳压电路可以按照以下步骤工作。
在步骤3.1中,利用第三NPN管Q
在步骤3.2中,利用稳压二极管D
在步骤3.3中,利用稳压电路的工作原理,根据该稳压电路的输入电压、输出电压要求,选用合适的稳压二极管D
参照图1和图5,所述存储及负载电路包括超级电容和负载电阻。例如,所述存储及负载电路包括超级电容Ct、负载电阻R
参照图13,利用交流源和电容组建压电振子的等效电路。所述压电振子的等效电路包括交流电流源I
当外部激振运动位移u以正弦函数变化时,将压电振子看作交流电流源I
I
假设机械振动位移u=-U
式(2)中
得:
结合式(1)、式(3)得:
I
式(4)中U
具体地,步骤四中分析用于智能物联制造系统的加工装备切削颤振能量采集电路输出性能的方法如下:
使用图13所示的压电振子等效电路模型替代图1中所示的压电振子Y
V
式(5)中V
谐振回路LC的周期相对于整个机械运动周期而言很小,因此激励位移在[t1,t2]时间段之内保持为最大值U
在[t1,t2]时间段之内,从压电振子流出的电荷只流入到电感L
式中I表示从压电振子流出的电流,i
式中α为力因子,在[t1,t2]时间段之内流入L的电流i
由于在半个周期内Vr的大小保持恒定不变,可以知道流入电容 C
联立式(6)-式(9)得:
则由式(10)得该能量采集电路的输出功率为:
在激振位移不变的条件下,该能量采集电路的输出功率随线性电阻R的变化而变化,令dP/dR=0可得最优负载Ropt为:
此时对应的最大输出功率为:
在激振力保持不变的条件下,用于智能物联制造系统的加工装备切削颤振能量采集电路在半个机械周期内回收的电能E
系统损耗的能量E
在半个机械振动周期内根据能量守恒定律可得:
式(16)中C为系统的等效阻尼。
假设在外部激振力作用下压电振子的振动位移如(17)所示:
u=U
假设外部激振力如(18)所示:
联立式(5)、式(13)、式(14)、式(15)及下式(19)、 (20)得到式(21):
联立式(11)、式(21)得,在激振力不变的条件下输出功率P 是:
对式(13)、式(22)分析可知,用于智能物联制造系统的加工装备切削颤振能量采集电路输出功率均随负载阻值变化。
上述说明示出并描述了本发明的实施方法,如前所述,应当理解本发明并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述发明构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本发明的精神和范围,则都应在本发明所附权利要求的保护范围内。
- 用于智能物联制造系统的加工装备切削颤振能量采集电路
- 一种智能锁以及用于智能锁的可扩展物联模块