一种基于人工智能的可视化操作吊运装置
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及吊运设备技术领域,尤其涉及一种基于人工智能的可视化操作吊运装置。
背景技术
吊运设备是在取料之后即开始垂直或垂直兼有水平的工作行程,到达目的地后卸载,再空行程到取料地点,完成一个工作循环,然后再进行第二次吊运或搬运,是工业、交通、建筑企业中实现生产过程机械化、自动化,减轻繁重体力劳动,提高劳动生产率的重要工具和设备,吊运设备在不断地完善和发展之中,先进的电气、光学、计算机技术在起重设备上得到应用,其趋向是增进自动化程度,提高工作效率和使用性能,使操作更简化、省力和更安全可靠。
在岩层探测或者竖井坑洞里面,垂直吊运设备为常用的工具,吊钩在坑洞中垂直升降完成工具、材料等物品的运输,但是,在吊运作业中坑洞内部环境因素造成操作人员无法观察物品运动情况,设备的振动和坑洞内壁不平等原因,容易造成物品无法保持在中心位置而与坑壁之间产生碰撞,甚至出现旋转现象,影响吊运的安全和稳定性,且容易造成设备的损坏。
有鉴于此,本发明提供一种基于人工智能的可视化操作吊运装置,以解决上述现有技术中存在的技术问题。
发明内容
基于背景技术存在的技术问题,本发明提出了一种基于人工智能的可视化操作吊运装置。
本发明提出的一种基于人工智能的可视化操作吊运装置,包括吊运机架,所述吊运机架的顶部安装有起降吊架,且吊运机架的外侧固定安装有保护壳罩,保护壳罩的四周均设置有收纳腔,所述吊运机架的内部安装有两个伸缩机构,且两个伸缩机构的外侧之间安装有多个限位机构,限位机构与收纳腔相适配,所述吊运机架的内部固定安装有双轴步进电机,且双轴步进电机的两端输出轴分别与两个伸缩机构传动连接,所述吊运机架的底部固定安装有连接架,且连接架的中部安装有吊装机构,所述连接架的四周安装有多个物品固定机构,且物品固定机构的侧面固定安装有与吊装机构相配合的锁定机构,所述吊运机架的顶部固定安装有上摄像机构,所述保护壳罩与连接架之间固定安装有多个保护盖,且保护盖的内部固定安装有下摄像机构。
本发明中优选地,所述限位机构包括板体,且板体的侧面固定安装有两个限位滚轮,两个限位滚轮的外侧之间套接有缓冲带。
本发明中优选地,所述伸缩机构包括旋转盘,且旋转盘的侧面与吊运机架之间转动安装有固定轴,旋转盘的外侧铰接有多个推拉杆,且推拉杆的另一端铰接有限位杆。
本发明中优选地,所述限位杆为气动阻尼杆或者弹簧阻尼杆中的一种,且限位杆的行程小于限位机构宽度的二分之一。
本发明中优选地,所述吊运机架包括两个半圆形结构的机架,且两个机架的内部之间设置有两个与伸缩机构相适配的安装槽,安装槽的内部固定安装有多个扇形结构的挡板,且安装槽的外侧设置有多个限位滑槽,两个机架的内部中央设置有与双轴步进电机相适配的副安装槽。
本发明中优选地,所述吊装机构包括主转动座,且主转动座的顶部与吊运机架之间安装有步进马达,主转动座的底部固定安装有副转动座,副转动座的底部固定安装有吊钩。
本发明中优选地,所述物品固定机构包括电动推杆,且电动推杆的底部螺接有安装套管,安装套管的底端铰接有固定爪。
本发明中优选地,所述吊装机构还包括固定安装于主转动座外侧的主定位齿盘,和固定安装于副转动座外侧的副定位齿盘,所述锁定机构包括活动杆和锁定杆,且锁定杆的底端尺寸小于上端尺寸。
本发明中优选地,所述吊运装置还包括安装于操作室的控制系统,其中控制系统包括显示模块、控制模块和报警模块,显示模块用于显示吊运作业时的物品和装置的影像,且标记绳索与激光光束之间的位置,报警模块用于警示,在物品出现晃动、偏移时及时发生报警,且在影像中进行标识,通过控制模块对装置进行操作控制,其中上摄像机构和下摄像机构均包括摄像机、照明灯和垂直分布的激光射灯。
与现有技术相比,本发明提供了一种基于人工智能的可视化操作吊运装置,具备以下有益效果:
上摄像机构和下摄像机构分别拍摄坑道中上、下影像,实现坑道中可视化吊运作业,物品吊运时,根据物品与连接架之间的间距选择不同长度的安装套管进行安装,物品脱离地面时利用电动推杆带动安装套管和固定爪下降,利用分布于物品重心轴周围的固定爪将货物进行牢牢固定,避免在吊运作业时出现晃动现象,且当物品出现倾斜时,可以通过增加反向的固定爪推挤力度,改变物品的倾斜方向,以适应坑道中的吊运环境,对装置和物品的保护,吊运作业时通过观察激光射灯与绳索和物品之间的位置和角度,判断吊运装置和物品运动状态,观察坑道中的环境和物品的位置,且检测吊运装置作业时的垂直度,在出现偏移和摆动时发出警报,通过操作限位机构、伸缩机构和物品固定机构之间的协作,对坑道中的物品进行调整,减少与坑道之间的碰撞,使得物品保持在坑道中心位置,避免与坑壁之间产生碰撞出现旋转、晃动等影响吊运安全。
附图说明
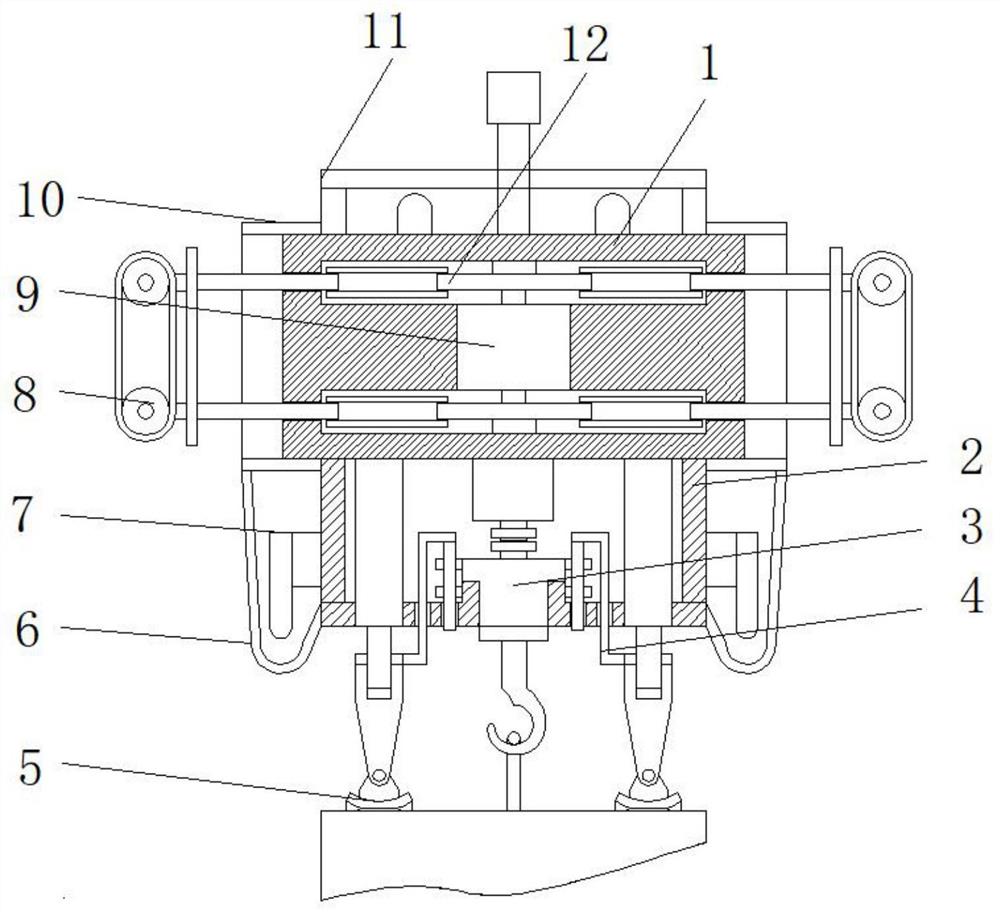
图1为本发明提出的一种基于人工智能的可视化操作吊运装置的结构示意图;
图2为本发明提出的一种基于人工智能的可视化操作吊运装置的吊运机架结构示意图;
图3为本发明提出的一种基于人工智能的可视化操作吊运装置的局部俯视结构示意图;
图4为本发明提出的一种基于人工智能的可视化操作吊运装置的伸缩机构结构示意图;
图5为本发明提出的一种基于人工智能的可视化操作吊运装置的吊装机构结构示意图;
图6为本发明提出的一种基于人工智能的可视化操作吊运装置的吊装机构局部结构示意图;
图7为本发明提出的一种基于人工智能的可视化操作吊运装置的锁定机构结构示意图;
图8为本发明提出的一种基于人工智能的可视化操作吊运装置的物品固定机构结构示意图;
图9为本发明提出的一种基于人工智能的可视化操作吊运装置的控制系统示意图。
图中:1吊运机架、101机架、102限位滑槽、103挡板、104安装槽、105副安装槽、2连接架、3吊装机构、301主转动座、302副转动座、303副定位齿盘、304主定位齿盘、305步进马达、306吊钩、4锁定机构、401活动杆、402锁定杆、5物品固定机构、501电动推杆、502安装套管、503固定爪、6保护盖、7下摄像机构、8限位机构、9双轴步进电机、10保护壳罩、11起降吊架、12伸缩机构、1201旋转盘、1202推拉杆、1203限位杆、1204固定轴、13上摄像机构。
具体实施方式
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
在本专利的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本专利和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。
在本专利的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“设置”应做广义理解,例如,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本专利中的具体含义。
参照图1-9,一种基于人工智能的可视化操作吊运装置,包括吊运机架1,吊运机架1的顶部安装有起降吊架11,且吊运机架1的外侧固定安装有保护壳罩10,保护壳罩10的四周均设置有收纳腔,其特征在于,吊运机架1的内部安装有两个伸缩机构12,且两个伸缩机构12的外侧之间安装有多个限位机构8,限位机构8与收纳腔相适配,吊运机架1的内部固定安装有双轴步进电机9,且双轴步进电机9的两端输出轴分别与两个伸缩机构12传动连接,吊运机架1的底部固定安装有连接架2,且连接架2的中部安装有吊装机构3,连接架2的四周安装有多个物品固定机构5,且物品固定机构5的侧面固定安装有与吊装机构3相配合的锁定机构4,吊运机架1的顶部固定安装有上摄像机构13,保护壳罩10与连接架2之间固定安装有多个保护盖6,且保护盖6的内部固定安装有下摄像机构7。
参照图1和图4,限位机构8包括板体,且板体的侧面固定安装有两个限位滚轮,两个限位滚轮的外侧之间套接有缓冲带,限位机构8的外侧脱离收纳腔,在坑道中限位机构8的外侧与内壁滚动连接,将吊运货物限定在坑道中央,且在物品升降时避免出现晃动和旋转现象发生,提高物品吊运的稳定性和安全性。
参照图1和图4,伸缩机构12包括旋转盘1201,且旋转盘1201的侧面与吊运机架1之间转动安装有固定轴1204,旋转盘1201的外侧铰接有多个推拉杆1202,且推拉杆1202的另一端铰接有限位杆1203,吊运装置位于坑道内部进行作业时,通过双轴步进电机9带动上下分布的旋转盘1201进行转动,通过推拉杆1202的作用带动限位杆1203于吊运机架1内部伸缩,进而带动限位机构8运动,贴合坑道的孔径避免吊运装置升降时与坑道壁接触碰撞。
参照图1和图4,限位杆1203为气动阻尼杆或者弹簧阻尼杆中的一种,且限位杆1203的行程小于限位机构8宽度的二分之一,在限位机构8受力时,具有阻尼缓冲作用的推拉杆1202可以进行有效缓冲,降低吊运装置偏移产生的影响,其次,对限位机构8提供缓冲保护,延长其使用寿命。
参照图1和图2,吊运机架1包括两个半圆形结构的机架101,且两个机架101的内部之间设置有两个与伸缩机构12相适配的安装槽104,安装槽104的内部固定安装有多个扇形结构的挡板103,且安装槽104的外侧设置有多个限位滑槽102,两个机架101的内部中央设置有与双轴步进电机9相适配的副安装槽105,在伸缩机构12运动时,其活动范围限定在安装槽104内部,且通过限位滑槽102的设置,增加伸缩机构12运动和受力时的稳定性,提高吊运装置作业时的安全性。
参照图1和图5,吊装机构3包括主转动座301,且主转动座301的顶部与吊运机架1之间安装有步进马达305,主转动座301的底部固定安装有副转动座302,副转动座302的底部固定安装有吊钩306,在吊运作业时,物品为不规则形状时,遇到坑道中的凸起障碍时,可以通过步进马达305带动主转动座301、副转动座302和吊钩306进行偏转,进而保护物品不受到损坏。
参照图1和图8,物品固定机构5包括电动推杆501,且电动推杆501的底部螺接有安装套管502,安装套管502的底端铰接有固定爪503,在物品吊运时,根据物品与连接架2之间的间距选择不同长度的安装套管502进行安装,物品脱离地面时利用电动推杆501带动安装套管502和固定爪503下降,利用分布于物品重心轴周围的固定爪503将货物进行牢牢固定,避免在吊运作业时出现晃动现象,且当物品出现倾斜时,可以通过增加反向的固定爪503推挤力度,改变物品的倾斜方向,以适应坑道中的吊运环境,进一步提高对装置和物品的保护效果。
参照图1和图5-8,吊装机构3还包括固定安装于主转动座301外侧的主定位齿盘304,和固定安装于副转动座302外侧的副定位齿盘303,锁定机构4包括活动杆401和锁定杆402,且锁定杆402的底端尺寸小于上端尺寸,在步进马达305停止旋转运动时,物品固定机构5作业将物品进行固定,同时带动锁定机构4下降,锁定杆402插入至副定位齿盘303和主定位齿盘304之间,进而对吊装机构3进行锁合,避免出现偏转现象,且锁定杆402的底端尺寸小于上端尺寸,锁定杆402插入时推动副定位齿盘303和主定位齿盘304重合,降低运动间隙,提高稳定性。
参照图1-9,吊运装置还包括安装于操作室的控制系统,其中控制系统包括显示模块、控制模块和报警模块,显示模块用于显示吊运作业时的物品和装置的影像,且标记绳索与激光光束之间的位置,报警模块用于警示,在物品出现晃动、偏移时及时发生报警,且在影像中进行标识,通过控制模块对装置进行操作控制,其中上摄像机构13和下摄像机构7均包括摄像机、照明灯和垂直分布的激光射灯,上摄像机构13和下摄像机构7分别拍摄坑道中上、下影像,通过观察激光射灯与绳索和物品之间的位置和角度,判断吊运装置和物品运动状态,观察坑道中的环境和物品的位置,且检测吊运装置作业时的垂直度,在出现偏移和摆动时发出警报,通过操作限位机构8、伸缩机构12和物品固定机构5之间的协作,对坑道中的物品进行调整,减少与坑道之间的碰撞。
本发明在应用时,将物品吊挂在吊装机构3底部,进入坑道中上摄像机构13和下摄像机构7分别拍摄坑道中上、下影像,实现坑道中可视化吊运作业,进入坑道后限位机构8的外侧与坑道内壁滚动连接,将吊运货物限定在坑道中央,通过双轴步进电机9带动上下分布的旋转盘1201进行转动,通过推拉杆1202的作用带动限位杆1203于吊运机架1内部伸缩,进而带动限位机构8运动,贴合坑道的孔径避免吊运装置升降时与坑道壁接触碰撞,物品为不规则形状时,遇到坑道中的凸起障碍时,可以通过步进马达305带动主转动座301、副转动座302和吊钩306进行偏转,进而保护物品不受到损坏,且通过观察激光射灯与绳索和物品之间的位置和角度,判断吊运装置和物品运动状态,观察坑道中的环境和物品的位置,且检测吊运装置作业时的垂直度,在出现偏移和摆动时,通过限位机构8、伸缩机构12和物品固定机构5的协作,对坑道中的物品进行调整,减少与坑道之间的碰撞。
以上,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种基于人工智能的可视化操作吊运装置
- 一种基于人工智能的可视化操作吊运装置