一种气体传动蛇形机器人
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及一种气体传动蛇形机器人,属于仿生机械人技术领域。
背景技术
近几年来,仿生机器人学正在机器人领域占有越来越重要的位置,蛇形机器人由于其结构的特殊性,已成为仿生领域的研究热点,传统的蛇形机器人都使用金属机械结构如平行连接关节、正交连接关节、万向节连接关节、P-R关节等控制运动方向,这种蛇形机器人不仅笨重而且不灵活,而且现有的蛇形机器人不能反向运动。
发明内容
本发明的目的在于提供一种气体传动蛇形机器人,用于探险、救援、医疗等复杂、狭小、危险的环境。
实现上述目的,本发明采取下述技术方案:包括柔性材料袋、分隔气体膜、分隔气体装置、收放柔性袋圆柱体、充抽气体驱动装置、皮带驱动装置;所述柔性材料袋为可折叠的柔性材料制成呈圆柱状并且具有密闭性,并且其内部充入一定量气体,所述柔性材料袋外表面有一定的摩擦力,使气体传动蛇形机器人与地面产生摩擦力从而转化为向前的驱动力,所述柔性材料袋由分隔气体装置的头部滚珠和内部气体支撑,折叠收缩后穿过所述收放柔性袋圆柱体内,并且在穿过收放柔性袋圆柱体内时接触皮带驱动装置中的皮带外表面与所述柔性材料袋产生摩擦使所述柔性材料袋产生向前的力,从而促进所述柔性材料袋内循环,从而为蛇形机器人提供驱动力,所述收放柔性袋圆柱体为中空的圆柱体且位于整体结构中心位置,所述收放柔性袋圆柱体中心面安装有四个平行中轴线且相互垂直的所述皮带驱动装置;
所述分隔气体膜由可折叠防水不透气材料制成将整体柔性袋平分为八个密闭空间,所述分隔气体膜套在所述分隔气体装置上可随着所述分隔气体装置和所述柔性材料袋收缩而收缩,从而保证气体传动蛇形机器人内平分的八个密闭空间始终保持密闭性;
所述充抽气体驱动装置为四个与所述收放柔性袋圆柱体平行且圆周排列,每个充抽气体驱动装置分别安装在上下两个密闭空间中心位置;
所述充抽流体驱动装置由充抽流体部分装置组成,所述充抽流体部分装置包括压力通气口、缸体、通气孔、前挡板、堵气孔橡胶塞、堵气孔橡胶塞外沿、密封橡胶圈、后挡板、连接柱、电机、壳体,所述缸体上端安装有所述压力通气口,所述压力通气口由开有十字形开口的可逆形变材料制成,所述缸体内部包括所述前挡板、所述密封橡胶圈、所述后挡板,所述密封橡胶圈与所述缸体内壁接触,所述前挡板和所述后挡板与所述缸体内壁留有一定缝隙,留有的缝隙小于所述密封橡胶圈的直径,所述密封橡胶圈和所述堵气孔橡胶塞在所述前挡板和所述后挡板中且与两板间留有一定间隙,所述前挡板和所述后挡板上开有两个对称所述通气孔,所述前后两挡板的所述通气孔与所述堵气孔橡胶塞过盈配合,所述堵气孔橡胶塞边部有所述堵气孔橡胶塞外沿,所述堵气孔橡胶塞与所述连接柱和所述电机相连接,所述电机与所述壳体固定连接。
与现有技术相比,本发明的有益效果是:
1、蛇形机器人将被用于复杂、狭小的危险地方执行任务,传统蛇形机器人不能改变体积使得在一些复杂、狭小的环境不能顺利完成任务,本发明可以通过改变体内的气体量,从而改变横截面面积的方式穿过一些复杂、狭小的环境;
2、本发明使用充抽气体装置驱动蛇形机器人,向前运动时充抽气体装置从后端密闭空间抽取气体向前端密闭空间输送,使得前端膨胀后端收缩从而使蛇形机器人向前运动,向后运动时充抽气体装置从前端密闭空间抽取气体向后端密闭空间输送,使得后端膨胀前端收缩从而使蛇形机器人向后运动,从而使本发明蛇形机器人可以向前或向后运动;
3、本发明使用柔性材料袋和四个充抽气体装置,通过分别控制四个充抽气体装置的功率,来控制前后两个密闭空间为一组的四组共八个密闭空间膨胀收缩速度来控制蛇形机器人的运动速度和运动方向。相较于传统的蛇形机器人使用金属机械结构控制运动方向更加灵活,重量更轻、运输更加方便。
附图说明
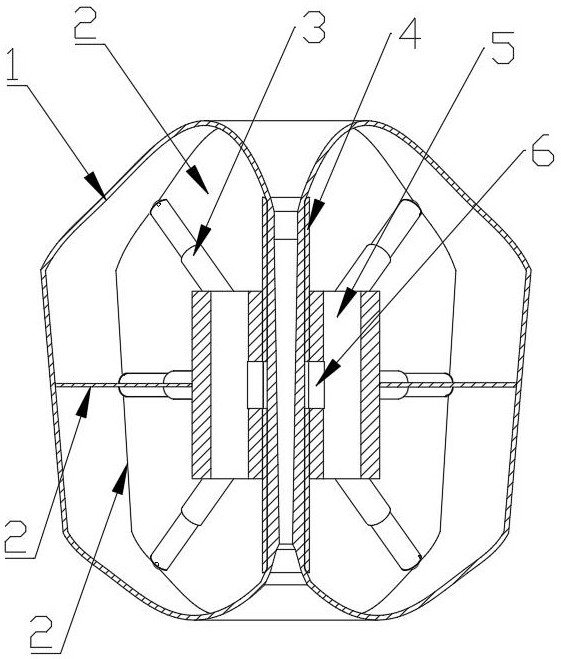
图1为本发明的整体前视剖面结构示意图;
图2为本发明的整体俯视剖面结构示意图;
图3为本发明的分隔气体装置部分结构示意图;
图4为本发明的充抽气体驱动装置部分结构示意图;
图5为本发明的充抽气体装置的内部剖面结构示意图;
图6为本发明的皮带驱动装置部分结构示意图;
图中标记说明:1、柔性材料袋;2、分隔气体膜;3、分隔气体装置;4、收放柔性袋圆柱体;5、充抽气体驱动装置;6、皮带驱动装置;31、滚珠;32、可伸缩圆柱;33、后端圆柱;34、弹簧;51、充抽气体部分装置;52、条形齿轮;53、间歇齿轮;54、从动齿轮;55、主动齿轮;56、轴;57、电机;510、压力通气口;511、缸体;512、通气孔;513、前挡板;514、堵气孔橡胶塞;515、堵气孔橡胶塞外沿;516、密封橡胶圈;517、后挡板;518连接柱、;519、电机;520、壳体;61、从动皮带轮;62、压轮;63、主动皮带轮;64、电机;65、皮带。
具体实施方式
下面将结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
具体实施方式一:如图1~图2所示,本发明披露了一种气体传动蛇形机器人,包括柔性材料袋1、分隔气体膜2、分隔气体装置3、收放柔性袋圆柱体4、充抽气体驱动装置5、皮带驱动装置6;
所述气体传动蛇形机器人的外面由所述柔性材料袋1围成,所述柔性材料袋1由可折叠的柔性材料制成承圆柱状且密闭其内部充入一定量气体,所述柔性材料袋1外表面有一定的摩擦力,使气体传动蛇形机器人与地面产生摩擦力从而转化为向前的驱动力,所述柔性材料袋1由所述分隔气体装置3的头部滚珠31和内部气体支撑,折叠收缩后穿过所述收放柔性袋圆柱体4内,并且在穿过所述收放柔性袋圆柱体4内时接触所述皮带驱动装置6中的皮带65外表面并与所述柔性材料袋1产生摩擦使所述柔性材料袋1产生向前的力,从而促进所述柔性材料袋前端膨胀后端收缩不断循环,所述柔性材料袋外表面与地面产生摩擦力,从而为蛇形机器人提供驱动力,所述收放柔性袋圆柱体4为中空的圆柱体且位于整体结构中心位置,所述收放柔性袋圆柱体4中安装有四个所述皮带驱动装置6,所述皮带驱动装置6圆周分布在所述收放柔性袋圆柱体4上;
所述分隔气体膜2由可折叠防水不透气材料制成,并将整体柔性袋平分为八个密闭空间,所述分隔气体膜2套在所述分隔气体装置3上可随着所述分隔气体装置3和所述柔性材料袋1收缩而收缩,从而保证气体传动蛇形机器人内平分的八个密闭空间始终保持密闭性。所述收放柔性袋圆柱体4中安装有四个所述皮带驱动装置6,所述皮带驱动装置6圆周分布在所述收放柔性袋圆柱体4上,四个所述充抽气体驱动装置5分别安装在上下两个密闭空间中心位置,每个充抽气体驱动装置5分别控制其所在的上下两个密闭空间,上下两个密闭空间为一组共四组八个密闭空间,通过分别控制四个所述充抽气体驱动装置5的功率,来控制四组八个密闭空间膨胀收缩速度从而控制蛇形机器人的运动速度和运动方向。调整一侧所述充抽气体驱动装置5的功率大,另一侧所述充抽气体驱动装置5的功率小,从而控制四组中对应两个密闭空间一侧膨胀速度快,另一侧膨胀速度慢,从而使蛇形机器人向着膨胀速度慢的一侧转向,从而实现对蛇形机器人运动方向的控制。
具体实施方式二:如图4、图5所示,本实施方式是对具体实施方式一作出的进一步说明,所述充抽气体驱动装置5包括充抽气体部分装置51,所述充抽气体部分装置51包括缸体511,所述缸体511上端压力通气口510由开有十字形开口的橡胶制成,当所述充抽气体驱动装置5工作时,所述缸体511内冲入大量气体其内压力过大或抽出大量气体其内过小时,所述压力通气口510开通,使其排出或充入气体,所述缸体511内部包括前挡板513、密封橡胶圈516、后挡板517,所述密封橡胶圈516与所述缸体511内壁接触,所述前挡板513和所述后挡板517与所述缸体511内壁留有一定缝隙,留有的缝隙小于所述密封橡胶圈516的直径,所述密封橡胶圈516和堵气孔橡胶塞514在所述前挡板513和所述后挡板517中且与两板间留有一定间隙,所述前挡板513和所述后挡板517上开两个对称通气孔512,所述前后两挡板的通气孔512与所述堵气孔橡胶塞514过盈配合,所述堵气孔橡胶塞514边部有堵气孔橡胶塞外沿515,以防止所述堵气孔橡胶塞穿过所述通气孔,所述堵气孔橡胶塞514与连接柱518和电机519相连,所述电机519与壳体520固定连接;
当蛇形机器人向前运动时,所述电机519正转带动所述518连接柱向后运动,使所述堵气孔橡胶塞514堵住后通气孔512,所述堵气孔橡胶塞外沿515与所述后挡板517接触,此时所述前挡板513上的所述通气孔512开通,后挡板517上的所述通气孔512闭合,所述条形齿轮52带动所述缸体511内所有元器件作往复运动,所述条形齿轮52带动所述缸体511内所有元器件向前运动时,所述密封橡胶圈516与所述后挡板517接触,挡住所述后挡板517与所述缸体511内壁的缝隙,使所述缸体511形成密闭空间,压缩其内部的气体当达到一定压力时所述压力通气口510开通,排出所述缸体511下半部分所在的密闭空间的气体,排入到所述缸体511上半部分所在的密闭空间中。所述条形齿轮52带动所述缸体511内所有元器件向后运动时,所述密封橡胶圈516与所述前挡板513接触,挡住所述前挡板513与所述缸体511内壁的缝隙,此时所述前挡板513上的所述通气孔512和所述后挡板517与缸体511间的缝隙开通,所述缸体511下半部分所在的密闭空间中的气体进入所述缸体511内,所述条形齿轮52带动所述缸体511内所有元器件作往复运动,进入下一个循环,从而达到将所述缸体511下半部分所在的密闭空间中的气体传送到所述缸体511上半部分所在的密闭空间中,使所述柔性材料袋前端膨胀后端收缩从而使蛇形机器人向前运动;
当蛇形机器人向后运动时,所述电机519反转带动所述518连接柱向前运动,使所述堵气孔橡胶塞514堵住前通气孔512,所述堵气孔橡胶塞外沿515与所述前挡板513接触,此时所述前挡板513上的所述通气孔512闭合,后挡板517上的所述通气孔512开通,所述条形齿轮52带动所述缸体511内所有元器件向前运动时,所述密封橡胶圈516与所述后挡板517接触,挡住所述后挡板517与所述缸体511内壁的缝隙,此时所述后挡板517上的所述通气孔512和所述前挡板513与缸体511间的缝隙开通,所述缸体511下半部分所在的密闭空间中的气体进入所述缸体511内,所述条形齿轮52带动所述缸体511内所有元器件向后运动时,所述密封橡胶圈516与所述前挡板513接触,挡住所述前挡板513与所述缸体511内壁的缝隙,使所述缸体511形成密闭空间,其内部压力过小时所述压力通气口510开通,使所述缸体511上半部分所在的密闭空间的气体,抽入到所述缸体511下半部分所在的密闭空间中。所述条形齿轮52带动所述缸体511内所有元器件作往复运动,进入下一个循环,从而达到将所述缸体511上半部分所在的密闭空间中的气体传送到所述缸体511下半部分所在的密闭空间中,使所述端柔性材料袋后端膨胀前端收缩从而使蛇形机器人向后运动。
具体实施方式三:如图6所示,本实施方式是对具体实施方式二作出的进一步说明,所述充抽气体驱动装置5,其特征在于,所述所述充抽气体驱动装置5包括充抽气体部分装置51、条形齿轮52,所述条形齿轮52的齿面与两个间歇齿轮53的齿面接触,两个所述间歇齿轮53分别与从动齿轮54和主动齿轮55同轴,所述主动齿轮55通过轴56与电机57相连。所述电机57带动轴56、主动齿轮55、间歇齿轮53旋转,主动齿轮55与从动齿轮54外啮合,带动所述从动齿轮和间歇齿轮53旋转,两个所述间歇齿轮53与所述条形齿轮52外啮合,从而使所述条形齿轮52往复运动。
具体实施方式四:如图3所示,本实施方式是对具体实施方式一作出的进一步说明,所述分隔气体装置3包括后端圆柱33其前端嵌套一个可伸缩圆柱32,所述可伸缩圆柱32前端按有滚珠31,所述可伸缩圆柱32和所述后端圆柱33中设置一段弹簧34,所述弹簧34的一端固定连接在所述滚珠31末端,另一端固定连接在所述后端圆柱33末端,所述滚珠31与所述柔性材料袋1内表面滑动摩擦,当所蛇形机器人运动时述柔性材料袋1内循环,所述分隔气体装置3不损坏所述柔性材料袋,所述分隔气体装置3内部安装有所述弹簧34使所述可伸缩圆柱32尽可能保持伸长状态,以保证八个密闭空间始终保持密闭性。所述分隔气体膜2为可折叠防水不透气材料,将整体柔性材料袋1平分为八个密闭空间,所述分隔气体膜2套在所述分隔气体装置3上可随着所述分隔气体装置3和所述柔性材料袋1收缩而收缩,从而保证一种气体传动蛇形机器人平分的八个密闭空间始终保持密闭性。
具体实施方式五:如图6所示,本实施方式是对具体实施方式一作出的进一步说明,所述皮带驱动装置6其特征在于,所述皮带驱动装置6包括从动皮带轮61、压轮62、主动皮带轮63、电机64、皮带65;所述皮带驱动装置6设置为四个,所述皮带驱动装置6安装在四个平行中轴线且相互垂直的所述收放柔性袋圆柱体4中心面上,所述电机64带动主动皮带轮63、从动皮带轮61、压轮62、皮带65旋转,所述压轮62侧所述皮带61外表面与所述收放柔性袋圆柱体4内的所述柔性材料袋1接触,所述柔性材料袋1折叠收缩后穿过所述收放柔性袋圆柱体4内,并且在穿过所述收放柔性袋圆柱体4内时接触所述皮带驱动装置6中的所述压轮62所在一侧的所述皮带65外表面使其与所述柔性材料袋1产生摩擦使所述柔性材料袋1产生向前的力,从而辅助柔性材料袋1向前内循环,配合所述充抽气体驱动装置5,使所述柔性材料袋前端膨胀后端收缩从而使蛇形机器人向前运动,或使所述柔性材料袋后端膨胀前端收缩从而使蛇形机器人向后运动。
一种气体传动蛇形机器人使用方法(工作原理):
(1)蛇形机器人内充入一定气体,当蛇形机器人向前运动时,所述充抽气体驱动装置5工作,所述电机519正转带动所述518连接柱向后运动,使所述堵气孔橡胶塞514堵住后通气孔512,所述电机57工作将所述缸体511下半部分所在的密闭空间中的气体传送到所述缸体511上半部分所在的密闭空间中,使所述柔性材料袋前端膨胀后端收缩从而使蛇形机器人向前运动;当蛇形机器人向后运动时,所述充抽气体驱动装置5工作,所述电机519反转带动所述518连接柱向前运动,使所述堵气孔橡胶塞514堵住前通气孔512,所述电机57工作将所述缸体511上半部分所在的密闭空间中的气体传送到所述缸体511下半部分所在的密闭空间中,使所述端柔性材料袋后端膨胀前端收缩从而使蛇形机器人向后运动;
(2)通过分别控制四个所述充抽气体驱动装置5的功率,来控制四组八个密闭空间膨胀收缩速度从而控制蛇形机器人的运动速度和运动方向,调整一侧所述充抽气体驱动装置5的功率大,另一侧所述充抽气体驱动装置5的功率小,从而控制四组中对应两个密闭空间一侧膨胀速度快,另一侧膨胀速度慢,从而使蛇形机器人向着膨胀速度慢的一侧转向,从而实现对蛇形机器人运动方向的控制。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的装体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同条件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种气体传动蛇形机器人
- 一种用于蛇形机器人的传动机构