软夹持单元、包括软夹持单元的夹持装置及夹持装置驱动方法
文献发布时间:2023-06-19 12:16:29
技术领域
本发明公开内容涉及一种软夹持单元、具有该软夹持单元的夹持装置以及该夹持装置的驱动方法,更具体地,本发明涉及一种能够更稳定地夹持物体的软夹持单元、具有该软夹持单元的夹持装置以及该夹持装置的驱动方法。
背景技术
通常,协作机器人是加强安全功能并在相同工作空间内与人协作的制造机器人。
协作机器人可重新配置,因而与传统的工业机器人相比可以增加生产灵活性。因此,协作机器人已经发展成单臂机器人、双臂机器人等。
然而,尽管由于对配送自动化的需求增加而迫切需要用于多品种产品和货物的自动化挑拣,具有仿真人手的机器臂的电机驱动的夹持器也是如传统的协作机器人一样的主要制成品。这里,为了执行人手的操作,每个手指都需要配备诸如致动器、旋转联杆等元件,并且每个元件都需要控制器,从而使夹持器的结构可能很复杂,并且该夹持器的集成控制系统也可能很复杂。
此外,传统的夹持器难以夹持具有各种形状和材料的物体。换言之,在传统夹具中,每个机器人只能夹持预定形状的物体,因而需要各种类型的机器人来夹持各种类型的物体,并且需要为每种物体重新设置控制器。
因此,需要稳定地夹持具有各种形状和材料的物体的技术,例如不规则物体、柔性物体等,以及稳定地保持夹持力的技术。
相关现有技术为韩国专利公开号10-2012-0126576(2012年11月21日)。
发明内容
本发明旨在解决相关技术的上述问题。本发明提供一种能够更稳定地夹持物体的软夹持单元、具有该软夹持单元的夹持装置以及该夹持装置的驱动方法。
本发明的技术目的不限于此,本领域普通技术人员可以在本发明的精神和范围内进行各种变型和修改。
根据示例性实施例,软夹持单元包括柔性罩、颗粒、负压生成器和柔性支撑部。柔性罩具有附接至目标物体的夹持面和与夹持面相结合的参考面,以在柔性罩内部形成容纳空间。颗粒容纳在容纳空间中,并对应于目标物体的形状而变形。负压生成器连接到柔性罩。负压生成器吸收容纳空间的空气以使柔性罩收缩,使得对应于目标物体的形状而变形的颗粒受压,以使柔性罩夹持目标物体。柔性支撑部紧密附接在参考面上,在柔性罩被目标物体加压且变形的同时,柔性支撑部变形以支撑柔性罩。
在一个示例中,软夹持单元还可以包括设置在容纳空间中的柔性袋,其具有气孔,气孔的尺寸小于颗粒的尺寸,并且在柔性袋的内部容纳颗粒。
在一个示例中,柔性袋可具有多个分隔部,并且颗粒可以均匀地分布并容纳在每个分隔部。
在一个示例中,负压生成器可具有延伸到容纳空间内部并吸入容纳空间的空气的抽吸管线。抽吸管线的一端可连接到柔性袋。
在一个示例中,软夹持单元还可包括信号发生器,当柔性罩变形达到预定压缩距离时,生成变形完成信号。
在一个示例中,信号发生器可包括设置在形成于柔性支撑部上的通孔内的压块,以及形成在柔性支撑部的表面的柔性电极,当柔性罩变形达到预定压缩距离时,柔性电极生成变形完成信号。
在一个示例中,在柔性支撑部未被压缩和变形的初始状态下,压块可以与柔性电极间隔开。
根据另一示例性实施例,软夹持装置包括第一刚性变形体、柔性支撑部和第二刚性变形体。第一刚性变形体具有第一柔性罩和容纳在第一柔性罩中的第一颗粒。在第一刚性变形体受外力变形之后,第一刚性变形体的刚度随着第一柔性罩内部的流体排出而发生变化,且沿着第一方向的刚度大于与第一方向不同的方向的刚度。柔性支撑部紧密附接第一刚性变形体的表面,并在第一刚性变形体被变形的同时,柔性支撑部被压缩和变形以支撑第一刚性变形体。第二刚性变形体与第一刚性变形体相邻地布置。第二刚性变形体受外力变形后,随着其内部流体的排出,第二刚性变形体的刚度发生变化,与第一方向交叉的第二方向的刚度大于与第一方向不同的方向的刚度,因而防止第一刚性变形体沿第二方向另外移动或变形。
在一个示例中,第一刚性变形体可具有设置在第一柔性罩内部并容纳第一颗粒的第一柔性袋。第一柔性袋可具有多个第一分隔部,第一分隔部由缝分隔并均匀容纳第一颗粒,并且缝的线迹可沿第一方向以锯齿图案缝合,以使第一柔性袋沿第一方向伸长和收缩。
在一个示例中,第二刚性变形体可具有与第一刚性变形体相对布置的第二柔性罩和容纳在第二柔性罩内部的第二颗粒。第二刚性变形体的刚度可以随着第二柔性罩内部的流体被排出而改变,并且沿着第二方向的刚度可以大于沿着与第二方向不同的方向的刚度。
在一个示例中,第二刚性变形体可具有设置在第二柔性罩内部并容纳第二颗粒的第二柔性袋。第二柔性袋可具有多个第二分隔部,第二分隔部由缝分隔并均匀地容纳第二颗粒,并且缝的线迹可沿第二方向以锯齿图案缝合,以使第二柔性袋沿第二方向伸长和收缩。
在一个示例中,可以在柔性支撑部中沿着高度方向形成安装空间。第二刚性变形体可具有设置在安装空间中的第三柔性罩和容纳在第三柔性罩内部的第三颗粒。当第二刚性变形体与第一刚性变形体一起变形并且第一刚性变形体的变形完成时,第二刚性变形体可以支撑柔性支撑部以防止柔性支撑部变形。
在一个示例中,可以在柔性支撑部中沿着高度方向形成安装空间。第二刚性变形体可具有设置在安装空间中的褶皱部和设置在褶皱部内部的弹性部。褶皱部可以随着第一刚性变形体的变形而被压缩和变形。弹性部可以拉伸被压缩和变形的褶皱部。第二刚性变形体还可具有阀。当褶皱部压缩和变形时,可以通过阀排出褶皱部内部的流体,并在褶皱部的压缩和变形完成时防止流体流入褶皱部。
在一个示例中,第二刚性变形体可具有覆盖柔性支撑部的侧表面的第四柔性罩,以及容纳在第四柔性罩内部的第四颗粒。当第二刚性变形体与第一刚性变形体一起变形并且第一刚性变形体的变形完成时,第二刚性变形体可以约束柔性支撑部以防止柔性支撑部变形。
在一个示例中,柔性支撑部可具有蜂窝结构,蜂窝结构具有多个气孔和多个侧壁,侧壁分别以基本相同的厚度划分气孔。各个气孔可以沿高度方向贯穿柔性支撑部,并且每个气孔的形状和横截面积可以基本相同。
在一个示例中,软夹持单元还可包括容纳第一刚性变形体、柔性支撑部和第二刚性变形体的包装罩。
根据又一示例性实施例,夹持装置包括臂、电源供应器和控制器。至少有一对臂。软夹持单元与臂结合,臂操作软夹持单元到达或远离目标物体。电源供应器用于向臂供电。控制器被配置为当目标物体使软夹持单元变形时,控制臂改变用于夹持目标物体的软夹持单元的刚度。
在一个示例中,夹持装置还可以包括保持单元,保持单元被配置为在至少一对软夹持单元之间操作,并且保持目标物体使其位于一对软夹持单元之间。
在一个示例中,保持单元可具有吸盘,并且吸盘可具有多个抽吸单元,多个抽吸单元分别形成由侧壁划分的内部空间。侧壁可以阻挡气流。可以向每个抽吸单元的内部空间提供吸力来夹持目标物体。
在一个示例中,保持单元可具有填充在每个抽吸单元的内部空间中的多孔柔性支撑材料。
根据本示例性实施例,柔性罩由柔性支撑部支撑,并且通过将柔性罩的厚度形成得更薄来减少颗粒的量,因而可以更有效地向物体施加压紧力。因此,可以用减小的力容易地夹持物体,并且可以更容易地夹持易碎物体而不会损坏物体。
此外,由于使用颗粒来夹持而固定了变形的形状,因而即使物体是柔性的或具有不规则形状,也可以稳定且连续地保持夹持。此外,物体的形状或物体的强度可以不受限制。
另外,当柔性罩变形达到预定压缩距离时,信号发生器产生变形完成信号,并且在产生信号时可以停止夹持操作,因而可以防止由于额外的不必要的夹持力而损坏物体。
此外,将第二刚性变形体添加到第一刚性变形体,以防止第一刚性变形体进一步变形或沿第二方向移动。这里,第一刚性变形体沿第一方向的刚度与沿其他方向的刚度相比相对较大,第二刚性变形体沿第二方向的刚度与沿其他方向的刚度相比相对较大。因此,可以稳定且连续地夹持物体。
此外,可以通过保持单元移动物体,以便软夹持单元夹持物体,因而无论物体的位置如何,都可以自动地对夹持物体。
这里,保持单元被多个抽吸单元划分为多个空间,从而减小抽吸单元之间的空间并且增加整个抽吸面积,以提高抽吸效率。
进一步地,当与物体接触的抽吸单元因物体形状的压力而变形时,抽吸单元的被物体挤压的部分与物体的表面接触,因此抽吸单元和物体两者之间的接触面积可以增加。因此,可以增加施加到物体的吸力。此外,由于吸附单元中填充了多孔柔性支撑材料,每个吸附单元更有效地为物体提供吸力。
附图说明
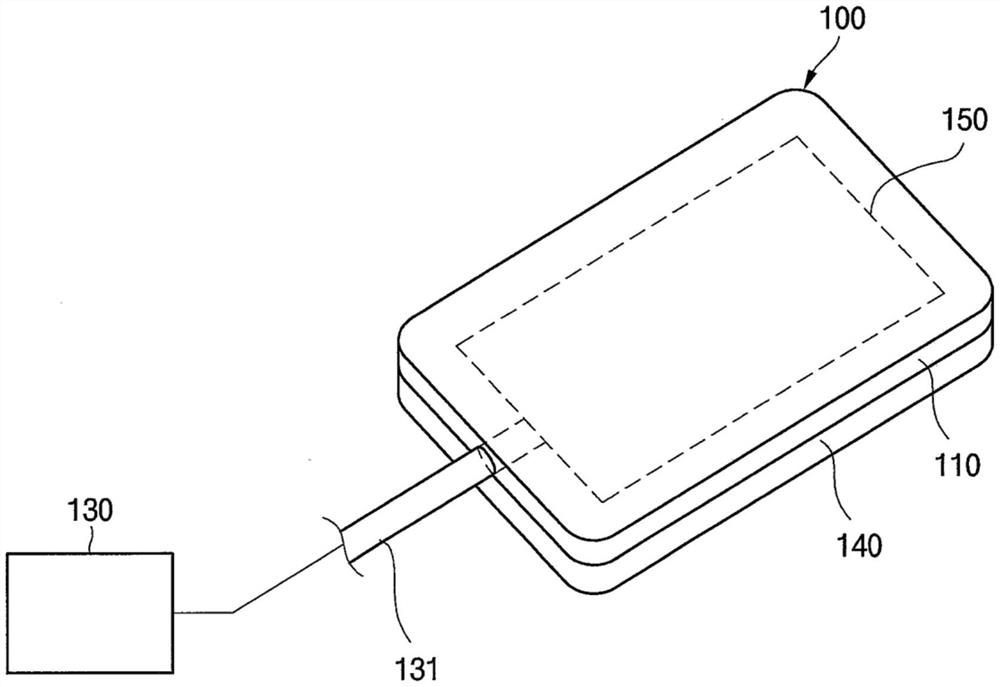
图1是示出根据本发明示例性实施例的软夹持单元的立体图;
图2是示出图1的软夹持单元的柔性袋的平面图和放大图;
图3是图1的软夹持单元的剖视图;
图4A和图4B是示出图1的软夹持单元的操作的示意图;
图5A和图5B是示出图1的软夹持单元的效果的示意图;
图6是示出根据本发明另一示例性实施例的软夹持单元的立体图;
图7是图6的软夹持单元的剖视图;
图8A和图8B是图6的软夹持单元的操作示意图;
图9是示出根据本发明又一示例性实施例的软夹持单元的立体图;
图10是图9的软夹持单元的剖视图;
图11是示出图9的软夹持单元的第一柔性袋的平面图和放大图;
图12A和图12B是图9的软夹持单元的操作示意图,图12C和图12D是图9的软夹持单元的效果示意图;
图13是示出图9的柔性支撑部的立体图;
图14A和图14B是图13的柔性支撑部的操作示意图。
图15A和图15B是示出根据本发明又一示例性实施例的软夹持单元的剖视图;
图16是示出图15A和图15B的第一刚性变形体和第二刚性变形体的立体图;
图17是示出根据本发明又一示例性实施例的软夹持单元的剖视图;
图18是示出根据本发明又一示例性实施例的软夹持单元的剖视图;
图19是示出具有图9的软夹持单元的夹持装置的示意图;
图20是示出图19的夹持装置的驱动方法的流程图;
图21A和图21B是示出根据本发明又一示例性实施例的夹持装置的夹持状态的示意图;
图22是示出根据本发明又一示例性实施例的夹持装置的保持单元的立体图;
图23是示出图22的保持单元的剖视图;
图24A是示出使用图22的保持单元的夹持状态的示意图,图24B是示出传统的夹持装置的夹持状态的示意图。
具体实施方式
下面将参照附图更全面地描述本发明,附图中示出了本发明的实施例。然而,本发明可以以许多不同的形式实施,并且不应被解释为限于这里阐述的实施例。相反,提供这些实施例是为了使本公开透彻和完整,并且将向本领域技术人员充分传达本发明的范围。在附图中,为了清楚起见,层和区域的尺寸和相对尺寸可能被夸大。
应当理解,尽管术语第一、第二、第三等可在本文中用于描述各种元件、部件、区域、层和/或部分,但是这些元件、部件、区域、层和/或部分不应受这些术语限制。这些术语仅用于将一个元件、部件、区域、层或部分与另一个区域、层或部分区分开。因此,在不脱离本发明的教导的情况下,下面讨论的第一元件、第一部件、第一区域、第一层或第一部分可以被称为第二元件、第二部件、第二区域、第二层或第二部分。为了便于描述,这里可以使用诸如“下方”、“下”、“上方”、“上”等空间相关术语来描述如附图中所示的一个元件或特征与另外的元件或特征的关系。
本文中使用的术语仅用于描述特定实施例的目的,并不旨在限制本发明。如本文所用,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文另有明确指示。将进一步理解,当在本说明书中使用术语“包括”和/或“包含”时,指定所述特征、整数、步骤、操作、元素和/或组件的存在,但不排除存在或添加一个或多个其他特征、整数、步骤、操作、元素、组件和/或其组合。除非另有定义,本文使用的所有术语(包括技术和科学术语)与本发明所属领域的普通技术人员通常理解的含义相同。还应当理解,诸如在常用词典中定义的那些术语应被解释为具有与其在相关领域的上下文中一致的含义,并且不应当以理想化或过于正式的含义来解释,除非在此明确定义。
下面参考附图更全面地描述本发明,其中示出了本发明的实施例。
图1是示出根据本发明的示例性实施例的软夹持单元的立体图。图2是示出图1的软夹持单元的柔性袋的平面图和放大图。图3是图1的软夹持单元的剖视图。
参考图1、图2和图3,根据本示例性实施例的软夹持单元100包括柔性罩110、颗粒120、负压生成器130和柔性支撑部140。
柔性罩110具有夹持面111和参考面112。夹持面111形成柔性罩110的第一侧并且目标物体附接到该夹持面111。参考面112与夹持面111相结合,并形成柔性罩110的第二侧。夹持面111与参考面112之间的内侧形成容纳空间113。
目标对象是由软夹持单元100夹持的任意对象。
柔性罩110可具有比较薄的柔性层,并且可以阻挡空气。
颗粒120填充于容纳空间113内部。此处,可以在容纳空间113内部填充大量颗粒120,并且每个颗粒的尺寸不受限制,颗粒120因而也可以是粉末。
当目标物体附接到柔性罩110时,颗粒120可以对应于附接到柔性罩110的目标物体的形状而变形。此处,颗粒120的变形是指每个颗粒120的形状因目标物体的压迫力而改变,并且颗粒120的整体布置或整体配置也因其压迫力而改变。
负压生成器130连接到柔性罩110。负压生成器130具有抽吸管线131,且该抽吸管线131延伸到容纳空间113中。负压生成器130通过抽吸管线131吸出容纳空间113内部的空气。
当负压生成器130吸入容纳空间113内部的空气时,可以使柔性罩110收缩。并且,随着容纳空间113的空气被排出以收缩柔性罩110,颗粒120被压紧并牢固地固定。
当负压生成器130吸入容纳空间113的空气随之目标物体附接在夹持面111上,颗粒120随着柔性罩110的收缩而被紧紧地压缩,然后颗粒120和柔性罩110被牢固地硬化并固定。变形的颗粒120被牢固地硬化并固定为与目标物体的形状相对应的变形形状,之后柔性罩110可以夹持附接到夹持面111的目标物体。
柔性支撑部140可紧密附接到柔性罩110。例如,柔性支撑部140的支撑面141可紧密附接到柔性罩110的参考面112。
目标物体附接在柔性罩110的夹持面111上,然后柔性支撑部140可随着柔性罩110和颗粒120的变形而同时变形。柔性支撑部140可以支撑柔性罩110。此处,柔性支撑部140可以包括聚合物。
框架(未示出)可以进一步设置在柔性罩110的下方以支撑该柔性罩110。
软夹持单元100可以进一步包括柔性袋150。
柔性袋150可容纳在容纳空间113,并且具有气孔151。此处,气孔151可以是多个。颗粒120可容纳在柔性袋150内。此处,当进一步包含柔性袋150时,颗粒120可容纳于柔性袋150中,然后具有颗粒120的柔性袋150可由容纳空间113容纳。
气孔151的尺寸可小于颗粒120的尺寸,并且因此颗粒120不会通过气孔151泄漏。
柔性袋150可具有网格形状。
柔性袋150可具有多个分隔部153,并且分隔部153可以通过缝154彼此分隔。
颗粒120均匀地由每个分隔部153容纳,并且颗粒120因而均匀地分布在柔性袋150中。
设置在柔性罩110内部的抽吸管线131的第一端连接到柔性袋150,并且因此由负压生成器130产生的吸力通过抽吸管线131直接提供给柔性袋150。
柔性袋150可以包括诸如纺织品的柔性材料。当来自负压生成器130的吸力被提供给柔性袋150时,柔性袋150内部的空气经由气孔151被排出至抽吸管线131中,并且容纳空间113内部的空气经由气孔151被排入柔性袋150中,之后被排出至抽吸管线131中。
因此,当通过抽吸管线131将容纳空间113的空气排出时,颗粒120相互压缩。此处,由于颗粒120均匀地分布在每个分隔部153中,因而在颗粒120的压缩过程中可以防止颗粒120结块并且可以均匀地分布在整个柔性袋150上。
在下文中,参照图4A和图4B解释软夹持单元的示例性操作。
图4A和图4B是示出图1的软夹持单元的操作的示意图。图4A示出了向容纳空间113提供吸力之前的状态,图4B示出了向容纳空间113提供吸力之后的状态。
如图4A所示,处于向容纳空间113提供吸力之前的初始状态,当目标物M受到夹持面111的挤压时,压紧力F对颗粒120施加压紧力,然后颗粒120对应于目标物体M的形状而变形。同时,柔性罩110的形状和柔性袋150的形状分别对应于目标物体M的形状而变形,并且柔性支撑部140也受压变形。
此处,目标物体M施加的压紧力F局限于目标物体M加压的部分。同样地,当由目标物体M施加的压紧力被局部化或集中时,可以最大化颗粒120的变形,并且颗粒120可以更有效地变形为与目标对象M的形状相对应。
然后,如图4B所示,当向柔性罩110施加吸力然后颗粒120被固定时,由目标物体M施加的压紧力分布或分散在整个柔性罩110、柔性袋150和柔性支撑部140上。
此处,施加到柔性罩110、柔性袋150和柔性支撑部140的分布力fl的总和与图4A中的压紧力F大致相同。因此,即使在夹住目标物体M之后施加附加压紧力,该附加压紧力也会是分散的并且施加到特定局部的力非常小,使得通过附加压紧力可以使得颗粒120的变形最小化。如此一来,颗粒120一旦对应于目标物体M的形状而变形即可稳定且持续地维持,并且可稳定且持续地维持对目标物体M的夹持。
在下文中,参照图5A和图5B解释软夹持单元的示例性效果。
图5A和图5B是示出图1的软夹持单元的效果的示意图。图5A的柔性罩10仅形成为具有与图5B中的柔性罩110和柔性支撑部140的总高度大致相同的高度。
参考图5A,随着柔性罩10的厚度增加,柔性罩10中容纳的颗粒量增加。因此,需要相对增加的力来使颗粒120变形。
施加到目标对象M的力被分配给使距离柔性罩10相对靠近目标对象M的颗粒变形的力f2和使距离柔性罩10相对远离目标对象M的颗粒变形的力f3。因而,靠近目标物体M施加的力f2不足以使目标物体M变形,从而使相对靠近目标物体M的颗粒不能有效地变形。换言之,由于相对靠近目标物体M的颗粒120没有很好地对应于目标物体M的形状而变形,因此即使通过吸力硬化颗粒120,对目标物体M的夹持力也可能受限或不足。
相比之下,参照图5B,如在本示例性实施例中,柔性罩110的厚度形成为相对较薄以减少颗粒的量,并且柔性支撑部140被配置为支撑柔性罩110,使得可以更有效地传输由目标对象M施加到颗粒120的压紧力F。因此,当施加与图5A和图5B的每个示例中基本相同的压紧力F时,颗粒120的变形可能比图5B的示例中更大,因而可增加颗粒120在目标物体M上的接触面积,进而可增加夹持力。
因此,可以使用相对较小的力来有效地夹持目标物体M,并且由于施加了相对较小的力,因此可以容易地夹持相对不牢固或易碎的物体,而避免对物体造成损坏或使物体的损坏最小化。
柔性支撑部140支撑柔性罩110以更有效地帮助柔性罩110的变形。
图6是示出根据本发明另一示例性实施例的软夹持单元的立体图。图7是图6的软夹持单元的剖视图。
参考图6和图7,根据本示例性实施例的软夹持单元200包括夹持部210、负压生成器130、第一柔性支撑部230和信号发生器240。夹持部210可以包括柔性罩211和颗粒213。
柔性罩211在其内部具有容纳空间212,并且具有柔性的薄膜形状或层形状。此处,该柔性罩211防止空气渗透。
颗粒213容纳在容纳空间212中,并且颗粒213可以是形成为粉末的材料,也可以是沙子,但不限于此。
当目标物体附接在或压在柔性罩211的第一表面214上时,颗粒213受压变形为与目标物体对应的形状。
负压生成器130吸收容纳空间212内的空气以使柔性罩211收缩,随之使柔性罩211和颗粒213变形。当柔性罩211收缩时,颗粒213被加压。当颗粒213被加压以固定时,柔性罩211的形状也被固定,使得目标物体被夹持部210夹持。
例如,负压生成器130通过抽吸管线131连接到柔性罩211。抽吸管线131延伸到容纳空间212的内部,负压生成器130通过抽吸管线131吸收容纳空间212内部的空气。
当容纳空间212中的空气被负压生成器130吸收时,柔性罩211收缩。此处,随着从容纳空间212排出空气并且柔性罩211收缩,颗粒213被更紧密地加压和固定。
夹持部210还可以包括柔性袋216。柔性袋216容纳在容纳空间212中并且颗粒213容纳在柔性袋213中。此处,抽吸管线131连接到柔性袋216.
柔性袋216包含柔性材料,并且具有网格形状。柔性袋216具有尺寸小于颗粒的气孔217。因此,当空气从柔性袋216排出至抽吸管线131时,容纳空间212内部的空气通过气孔217进入柔性袋216内部,然后排出至抽吸管线131。
第一柔性支撑部231的表面附接到柔性罩211的第二表面215。第一支撑部230被压缩和变形以在夹持部210变形的同时支撑该夹持部210。第一柔性支撑部230可以包含聚合物材料,并且可以包含蜂窝结构。
第一柔性支撑部230具有沿高度方向穿过第一柔性支撑部230的通孔231。通孔231的第一端朝向柔性罩211的第二表面215开口,并且通孔231的第二端朝向柔性电极250开口。通孔231可以是多个,并且多个通孔231的数量可以均匀地布置。这里,通孔231的数量或布置可以以各种方式改变。
当夹持部210变形达到预定压缩距离时,信号发生器240生成信号。信号发生器240具有压块241和柔性电极250。
压块241设置在第一柔性支撑部230的内部。例如,压块241可以设置在通孔231的第二端的内部。当夹持部210被目标物体M加压且变形时,第一柔性支撑部230压缩变形,并且当夹持部210到达预定压缩距离时,压块241被夹持部210加压推动。
压块241与通孔231的内表面间隔开,且压部241的下部固定到通孔的内表面。因此,在夹持部210到达预定压缩距离之前,压块241不与通孔231相互作用。当第一柔性支撑部230被第一柔性支撑部230压缩时,第一柔性支撑部230沿高度方向变形。因此,在夹持部210对压块241加压之前,通孔231的内表面可以按压或推动压块241。此外,可以由压块241的长度增加引起上述压或推。因此,在本示例性实施例中,由于压块241的下部固定在通孔231的内表面中,而压块241的其他部分没有固定并且与通孔231的内表面间隔开。当第一柔性支撑部230沿高度方向均匀变形时,在气孔231中,直到夹持部210开始接触压块241时,才按压和推动压块241。
柔性电极250设置在第一柔性支撑部230下方。当夹持部210变形达到预定压缩距离时,通过按压压块241而电连接柔性电极250。
在图7中,在柔性电极250下方附加地设置第二柔性支撑部260,并且第二柔性支撑部260可以包括弹性材料,使得第二柔性支撑部260可以在被按压的柔性电极的部分中被压缩或受压。下面参照图8A和图8B说明第二柔性支撑部260的操作。
图8A和图8B是示出图7的软夹持单元的操作的示意图。
参照图8A,在柔性电极250未被压块241加压的初始状态下,第二柔性支撑部260不变形。然后,参考图8B,当目标物体使夹持部210和柔性支撑部230M变形,并且压块241a被夹持部210加压时,由压块241a加压的柔性电极250的部分250a也对第二柔性支撑部260加压。此处,第二柔性支撑部260可具有弹性材料,并且随着柔性电极250恢复到初始形状,第二柔性支撑部260也可以恢复到初始形状。
当柔性电极250电连接时,操作负压生成器13以固定或硬化夹持部210。此处,在柔性电极250被电连接的时间和夹持部硬化的时间之间存在时间间隔。此处,如果将第二柔性支撑部260替换为硬支撑部,压块241阻碍夹持部210的变形,因而通过压块241向目标物体M施加反作用力。这样可能损坏相对较弱或易碎的目标对象M。然而,如在本示例性实施例中,配备了第二柔性支撑部260,从而可以进一步压缩第二柔性支撑部260,以在时间间隔内进一步移动压块241。因此,压块241的反作用力可能不会施加到目标物体M。
此外,由于压块241设置在通孔231内部,具体是设置在通孔231下部的内部,因此压块241和柔性支撑部230之间的物理相互作用可以在柔性支撑部230的压缩期间最小化。
在柔性支撑部230未压缩和变形的初始状态下,压块241与柔性电极250间隔开。
图9是示出根据本发明又一示例性实施例的软夹持单元的立体图。图10是图9的软夹持单元的剖视图。
参考图9和图10,根据本示例性实施例的软夹持单元300包括第一刚性变形体310、柔性支撑部330和第二刚性变形体340。
第一刚性变形体310包括第一柔性罩311和第一颗粒312。
第一柔性罩311具有袋状,其内部具有空间,并且具有柔性薄层。第一柔性罩311防止空气渗透。
在第一柔性罩311中容纳并填充第一颗粒312。第一颗粒312可以包括形成粉末的材料,并且可以是沙子,但不限于此。
当目标物体被第一柔性罩311加压时,第一颗粒312变形为与目标物体的形状相对应的形状。此处,颗粒312的变形是指颗粒移动和颗粒的每个形状或颗粒的整体分布或形状改变。
软夹持单元300具有第一负压生成器320。第一负压生成器320通过第一抽吸管线321连接到第一柔性罩311,第一抽吸管线321延伸到第一柔性罩311的内部。
第一负压生成器320吸收第一柔性罩311内部的空气,以使第一柔性罩311收缩,同时处于被第一柔性罩311和第一颗粒312变形的状态。第一颗粒312随着第一柔性罩311收缩而被压缩。第一刚性变形体310的刚度随着第一颗粒312被压缩和固定而增加,并且因此可以夹持目标对象。
第一刚性变形体310设置在第一柔性罩311内部,并且具有容纳第一颗粒312的第一柔性袋313。
图11是示出图9的软夹持单元的第一柔性袋的平面图和放大图。
参考图9、图10和图11,第一柔性袋313在其内部容纳第一颗粒312,并且第一抽吸管线321连接到第一柔性袋313。
第一柔性袋313具有柔性材料,并且具有网格形状。第一柔性袋313具有尺寸小于第一颗粒312的气孔317。
气孔317的尺寸小于第一颗粒312的尺寸,使得容纳在第一柔性袋313中的第一颗粒312不会通过气孔317泄漏。
当第一柔性袋313的空气由第一抽吸管线321吸收时,第一柔性罩311内部的空气也通过气孔317排到第一柔性袋313中,然后被第一抽吸管线321吸出。
第一柔性袋313具有多个第一分隔部315,第一分隔部315被缝314均匀地分隔。第一颗粒312可均匀地分布于第一分隔部315,并均匀地容纳于第一柔性袋313。
缝314的线迹316可以形成为沿着第一方向Dl的锯齿形。当线迹316沿第一方向D1形成为直线时,柔性袋难以沿第一方向D1延伸。这样即使目标物体对柔性袋加压,柔性袋也不会柔性变形并且可能减小夹持力。
然而,如在本示例性实施例中,缝314的线迹316沿第一方向Dl以锯齿形延伸,使得第一柔性袋313可沿第一方向Dl伸长和收缩,且第一柔性袋313的形状可以柔性变形。
此外,由于第一分隔部315沿第一方向Dl延伸,当第一颗粒312由于第一柔性罩311内部的空气或流体被去除而彼此紧密接触时,第一刚性变形体310沿第一方向D1的刚度大于沿不同于第一方向D1的方向的刚度。
柔性支撑部330紧密地附接到第一刚性变形体310的第一表面318。柔性支撑部330在第一刚性变形体310变形的同时支撑压缩的第一刚性变形体部310。柔性支撑部330可包括聚合物材料并具有气孔,因此,当压缩柔性支撑部330的外力被去除时,柔性支撑部330可恢复到初始形状。
第二刚性变形体340与第一刚性变形体310相邻设置。通过外力使第二刚性变形体340变形,并且第二刚性变形体340的刚度随着第二刚性变形体340内部的流体或空气被排出而改变。这里,第二刚性变形体340沿第二方向D2的刚度可以大于沿不同于第二方向D2的方向的刚度。第二方向D2可以与第一方向D1交叉。
第二刚性变形体340具有与第一刚性变形体310的形状基本相同的形状,并且设置在第一刚性变形体310的第二表面319上。
第二刚性变形体340包括第二柔性罩341和第二颗粒342。第二柔性罩341和第二颗粒342可以分别与第一柔性罩311和第一颗粒312基本相同。
软夹持单元300包括第二负压生成器350和第二柔性袋343。第二负压生成器350通过第二抽吸管线351连接到第二柔性罩341内部的第二柔性袋343。第二柔性袋343可以包括气孔347。
第一负压生成器320和第二负压生成器350是独立配备的,但不限于此。例如,第一负压生成器320和第二负压生成器350可以一体地形成,并且当负压生成器运行时,第一刚性变形体310和第二刚性变形体340可以同时变形。
由于第二刚性变形体340与第一刚性变形体310重叠,使得第二刚性变形体340可以与第一刚性变形体310同时被加压且变形。另外,当第二负压生成器350排出空气柔性罩341内部的空气时,可以改变第二刚性变形体340的刚度。
第二柔性袋343也被缝分隔,因此第二柔性袋343也可以包括多个分隔部(未示出),第二颗粒342均匀分布和容纳在其中。此处,缝的线迹也可以形成为具有锯齿形。
在第二刚性变形体340中,第二柔性袋343的缝(未示出)可以沿第二方向D2延伸。因此,第二刚性变形体340可以沿第二方向D2伸长和收缩。第二刚性变形体340的变形大小可以与第一刚性变形体310的变形大小基本相同。
在第一刚性变形体310中,第一分隔部315沿着第一方向D1延伸,使得沿着第一方向D1的刚度在沿着与第一方向D1不同的其他方向的刚度中最大。这样,在第一刚性变形体310变形和固定之后,第一刚性变形体310可以沿着不同于第一方向D1的其他方向变形。然而,在本示例性实施例中,在第二刚性变形体340中,第二分隔部沿第二方向D2延伸,增加了沿第二方向D2的刚度,以防止第一刚性变形体310沿第二方向D2进一步变形。这意味着,还防止了第二刚性变形体340沿第一方向D1进一步变形。因此,可以均匀且连续地保持夹持目标物体时的变形和固定状态。
图12A和图12B是示出图9的软夹持单元的操作的示意图,图12C和图12D是示出图9的软夹持单元的效果的示意图。
图12A示出了第一刚性变形体310的刚度和第二刚性变形体340的刚度没有改变之前的状态。图12B示出了第一刚性变形体310的刚度和第二刚性变形体340的刚性变形体之后的状态。
参照图12A,在第一刚性变形体310的刚度和第二刚性变形体340的刚度没有改变之前的初始状态下,当第二刚性变形体340向目标对象M加压时,通过压紧力F使第一刚性变形体310和第二刚性变形体340变形为与目标物体M对应的形状。同时,柔性支撑部330也受压变形。
此处,压紧力F被局限在目标物体M直接与第二刚性变形体340接触的部分。因此,当压紧力F局部化并集中在该部分时,第一颗粒312和第二颗粒342最大程度地变形,并且第一颗粒312和第二颗粒342对应于目标对象M而有效地变形。
然后,参考图12B,当在第一刚性变形体310和第二刚性变形体340内部施加吸力而且第一颗粒312和第二颗粒342固定时,目标物体M的压紧力分布在第一刚性变形体310、第二刚性变形体340和柔性支撑部330上。
此外,施加到第一刚性变形体310、第二刚性变形体340和柔性支撑部330的分布力fl的总和与图12A中的压紧力F基本相同。因此,即使在夹持目标物体M之后进一步施加压紧力,该压紧力也能以相对较小的力均匀分布,因而可防止第一颗粒312和第二颗粒342进一步变形,或者可最小化该变形。因此,可以稳定且连续地保持第一颗粒312和第二颗粒342对应于目标物体M的形状而变形,并且可以稳定且连续地保持对目标物体M的夹持。
参照图12C,单个刚性变形体10形成为具有与图12D的第一刚性变形体310、第二刚性变形体340和柔性支撑部330的总高度基本相同的高度。
参考图12C,随着刚性变形体10的厚度增加,刚性变形体10中容纳的颗粒量也会增加,因此用于使颗粒变形的力应该增加。
施加到目标对象M的力被分布为使距离刚性变形体10相对靠近目标对象M的颗粒变形的力f2,以及使距离刚性变形体10相对远离目标对象M的颗粒变形的力f3。因此,靠近目标物体M施加的力f2不足以使目标物体M变形,使得相对靠近目标物体M的颗粒可能不会有效地变形。换言之,由于相对靠近目标物体M的颗粒没有很好地对应于目标物体M的形状而变形,即使通过吸力硬化颗粒120,对目标物体M的夹持力也可能受限或不足。
换言之,为了有效地使用刚性变形体10来夹持目标对象M,应该使相对靠近目标对象M的颗粒有效地变形。施加到靠近目标物体M的部分的力f2必须足够大以夹住目标物体M,但如果为了更有效地夹住目标物体M而增加力f2,则可能在夹持中损坏目标物体M。
相比之下,如图12D所示,减小第一刚性变形体310的厚度和第二刚性变形体340的厚度以减少颗粒的量,并且配备柔性支撑部330来支撑第一刚性变形体310和第二刚性变形体340。因而,来自目标物体M的压紧力F1可以有效地分配到第一刚性变形体310和第二刚性变形体340中的第一颗粒312和第二颗粒342上。因此,当由目标物体M施加压紧力F时,第一颗粒312和第二颗粒342可以更有效地变形,以增加与目标物体M的接触面积,并增强对目标物体M的夹持力。
因此,在本示例性实施例中,可以使用相对较小的力来有效地夹持目标物体M,并且由于施加了相对较小的力,因此可以容易地夹持相对不牢固或易碎的物体,并避免或最小化物体的损坏。此外,沿着第一方向D1的刚度和沿着第二方向D2的刚度彼此基本相同,因而防止第一刚性变形体310和第二刚性变形体340进一步变形,并且可以稳定且连续地移动目标对象M。
图13是示出图9的柔性支撑部的立体图。图14A和图14B是示出图13的柔性支撑部的操作的示意图。图14A示出了根据本示例性实施例的柔性支撑部的变形,图14B示出了传统海绵的变形。
参考图13,柔性支撑部330可以包括具有多个气孔331的蜂巢结构。气孔331穿过柔性支撑部330并且气孔331的高度与柔性支撑部330基本相同。每个气孔331具有彼此基本相同的形状和截面积。侧壁332分隔每个气孔331,且侧壁332的厚度基本相同。在具有上述结构和形状的柔性支撑部330中,刚度不是沿着特定方向形成的,因此无论柔性支撑部330的变形位置和目标对象M的大小如何,柔性支撑部330都可具有均衡的性能。
此外,如图14A所示,柔性支撑部330的表面拉伸模量相对较大,因此第一角度A1可能随着对目标物体M加压而增大。因此,减小以传递第一刚性变形体310的变形,并且第一刚性变形体310可以局部地或在相对较小的区域内变形。此外,柔性支撑部330即使被压缩,其在恒定压缩变形期也均匀地保持着恢复力或在恒定压缩变形期之后也不会迅速增加恢复力,使柔性支撑部330相对接近于目标物体M的形状而变形,以提高对目标物体的夹持效率。
相比之下,如图14B所示,传统海绵30的表面拉伸模量相对较小,因此第二角度A2可能随着对目标物体M加压而减小。因此,可能会降低对目标物体M的夹持性能。
参考图9和图10,软夹持单元300可以包括包装罩360。包装罩360容纳并保护第一刚性变形体310、柔性支撑部330和第二刚性变形体340。
图15A和图15B是示出根据本发明的又一示例性实施例的软夹持单元的剖视图。图16是示出图15A和图15B的第一刚性变形体和第二刚性变形体的立体图。
本示例性实施例中的第二刚性变形体,被配置为不同于图9的先前示例性实施例中的第二刚性变形体。
参考图15A和16,本示例性实施例中的第二刚性变形体340a安装在柔性支撑部330中。此处,柔性支撑部330可具有沿高度方向形成的安装空间333。
第二刚性变形体340a包括第三柔性罩341a和第三颗粒342a。第三柔性罩341a设置于安装空间333内,第三颗粒342a容纳于第三柔性罩341a内。第三柔性罩341a可以与上述第一柔性罩311相同,并且第三颗粒342a可以与上述第一颗粒312相同。
第二刚性变形体340a包括第三柔性袋343a,并且第三柔性袋343a容纳在第三柔性罩341a中。第三颗粒342a容纳于第三柔性袋343a中。
第三抽吸管线351a连接到第三柔性袋343a,并且将第三柔性袋343a内部的流体或空气排出。第三抽吸管线351a可连接至上述第一负压生成器320或第二负压生成器350。
第二刚性变形体340a可以与第一刚性变形体310一起变形,并且当第一变形310完全变形时,第二刚性变形体340a支撑柔性支撑部330以防止柔性支撑部330变形。由于柔性支撑部330在变形后具有弹性恢复力,柔性支撑部330的与第一刚性变形体310相邻的部分对应于第一刚性变形体310的形状而变形,但是由于沿着柔性支撑部330的高度方向的恢复力而保持恢复均衡。此外,当柔性支撑部330的形状如上述变形时,可以改变第一刚性变形体部310的位置。然而,由于第二刚性变形体部340a沿柔性支撑部330的高度方向设置在柔性支撑部330内部,因此防止了柔性支撑部330的恢复变形,因而防止了第一刚性变形体部310移动,并且第一刚性变形体310的形状稳定且持续地保持在夹持状态。
参考图16,第二刚性变形体340a的第三缝344a沿第二方向D2延伸,并与沿第一方向D2延伸的缝314交叉。
如图15B所示,第三柔性罩341a的内部与第一柔性罩311的内部连接。这里,当流体或空气通过第一抽吸管线321被排出时,第二刚性变形体340a内部的流体或空气也被排出,因此可以省略第三抽吸管线351a。
图17是示出根据本发明又一示例性实施例的软夹持单元的剖视图。
根据本示例性实施例的软夹持单元与图15A中的软夹持单元除第二刚性变形体之外基本相同,因此相同的附图标记用于相同的元件,并将省略任何重复的解释。
参考图17,在根据本示例性实施例的软夹持单元中,第二刚性变形体部340b包括皱褶部341b、弹性部342b和阀343b。
褶皱部341b沿高度方向设置在安装空间333中的柔性支撑部330上。当第一刚性变形体310变形时,褶皱部341b压缩变形。
弹性部342b设置在褶皱部341b的内部,并且拉长压缩的褶皱部341b。当变形后的第一刚性变形体310恢复到初始形状时,弹性部342b将褶皱部341b拉伸到初始形状。
抽吸管线344b连接到褶皱部341b,并且阀343b与抽吸管线344b相结合。
在褶皱部341b压缩期间,阀343b排放褶皱部341b内部的流体或空气。相反,在褶皱部341b的压缩和变形完成后,阀343b防止流体或空气流入或流出褶皱部341b以保持褶皱部341b的形状或变形。.
阀343b可以设置在每条抽吸管线344b处,或者可以设置单个阀以连接到所有抽吸管线344b。当设置单个阀343b时,连接到阀343b的抽吸管线344b的长度可以彼此基本相同。每个第二刚性变形体340b内部的流体或空气量因而可以保持基本相同,并且每个第二刚性变形体340b可以以相同的速度变形。
图18是示出根据本发明又一示例性实施例的软夹持单元的剖视图。
根据本示例性实施例的软夹持单元与图9中的软夹持单元除第二刚性变形体之外基本相同,因此相同的附图标记用于相同的元件,并且将省略任何重复的解释。
参考图18,在本示例性实施例中,第二刚性变形体340c包括第四柔性罩341c和第四颗粒342c。
第四柔性罩341c包围柔性支撑部330的侧表面。在图18中,第二刚性变形体340c布置在柔性支撑部330的左侧和右侧,而第二刚性变形体340c也布置在柔性支撑部330的前侧和后侧。第四柔性罩341c包围柔性支撑部330的所有侧表面,并且第二刚性变形体340c连接到附加的负压生成器。
第二刚性变形体340c与第一刚性变形体310一起变形,因此当第一刚性变形体310完全变形时,第二刚性变形体340c约束柔性支撑部330不变形。在本示例性实施例中,第二刚性变形体340c可以有益于软夹持单元300在软夹持单元300的一侧夹持相对小的物体。
第二刚性变形体340c的第四柔性罩341c、第四柔性袋343c和第四颗粒342c分别与第一柔性罩311、第一柔性袋313和第一颗粒312基本相同。
此外,第四柔性罩341c可以连接到第一柔性罩311,在这里第二刚性变形体340c可以连接到上述的第一负压生成器320。
图19是示出具有图9的软夹持单元的夹持装置的示意图。
参考图19,夹持装置包括软夹持单元300、臂400、电源供应器500和控制器600。在下文中,为了便于说明,软夹持单元300是参照图9说明的软夹持单元,但不限于此。软夹持单元300因而可以为参照图1、图6、图15A、图15B、图17和图18解释的软夹持单元中的一者。
因此,省略了对软夹持单元300的任何进一步解释。
臂400可以是一对,并且软夹持单元300与该对臂400的每一端结合。臂400使第一刚性变形体310朝向或远离目标物体M移动。
电源供应器500向臂400供电。
控制器600控制臂400的操作,并控制目标物体M的夹持。例如,在第一刚性变形体310和第二刚性变形体340变形以夹持目标对象M之后,控制器600排出第一刚性变形体10和第二刚性变形体340内部的流体或空气。
当软夹持单元300充分地对目标物体M加压时,控制器600停止电源供应器500的电力传输,以控制臂400停止夹持操作。因此,改变了第一刚性变形体310和第二刚性变形体340中的每一个的刚度来夹持目标对象M。
图20是表示图19的夹持装置的驱动方法的流程图。
参考图20,夹持装置的驱动方法包括:S510对目标物体加压,S520变形和S530夹持。
在S510对目标对象加压中,操作该臂用于使至少一对第一刚性变形体对目标对象加压。
在S520变形中,第一刚性变形体、柔性支撑部和第二刚性变形体由于目标对象而变形。
在S530夹持中,排出第一刚性变形体和第二刚性变形体中的每一个的内部的流体或空气,因而改变了第一刚性变形体和第二刚性变形体中的每一个的刚度来夹持目标对象。
图21A和图21B是示出根据本发明又一示例性实施例的夹持装置的夹持状态的示意图。
在本示例实施例中,图9的软夹持单元300被示出为夹持装置包括的软夹持单元,但是根据本示例实施例的夹持装置的软夹持单元可以是上面参照图1、图6、图15A、图15B、图17和图18说明的软夹持单元中的任意一个。
参考图21A和图21B所示,夹持装置702包括框架701、保持单元702和至少一对软夹持单元300。
框架701支撑并固定保持单元702和软夹持单元300的元件。
保持单元702连接到框架701,并且保持单元702设置在平台S上的目标对象M上方。保持单元702将目标对象M保持在平台S上,并且从舞台S向上方移动目标物体M。
例如,目标对象M可具有诸如薄膜、薄层、基板等的板状,但不限于此。
保持单元702将目标物体M的上表面保持在载物台S上,并且如图21B所示,保持单元702可以从载物台S上下移动目标对象M。
保持单元702包括附接部710、负压生成器730和移动部750。
附接部710包括柔性垫并且包括柔性材料。附接部710可具有诸如薄片、圆锥、杯等的形状。柔性垫可以阻挡空气渗透。
以在柔性垫的一侧形成附接开口,以紧密地附接到目标物体M。在附接开口紧密地附接到目标物体M之后可以阻塞柔性垫的内部空间。柔性垫的内部空间连接到负压生成器710的抽吸管线。
负压生成器730连接到附接部710。负压生成器730包括抽吸管线,并且抽吸管线连接到附接部710的内部空间。负压生成器730通过抽吸管线排出附接部710内部的空气。
负压生成器710排出附接部710内部的空气,然后将目标物体M紧密地附接到附接部710的附接表面。例如,目标物体M可以附接到附接部710的附接开口。
移动部750将框架701和附接部710连接。移动部750朝向或远离载物台S移动附接部710。换言之,移动部750从载物台S上下移动附接至附接部710的目标对象M。
附接至附接部710的目标物体M在预定高度内上下移动。
至少一对软夹持单元300被配置成将保持单元702放置在其间。该对软夹持单元300被配置为彼此面对,并且保持单元702被配置在该对柔性夹持单元300之间。
或者,两对软夹持单元300可以配置为彼此面对,这意味着四个软夹持单元300可以以90°的角度布置。此时,保持单元702可以设置在软夹持单元300的中心。
在保持单元702将目标物体M提升预定高度之后,彼此面对的软夹持单元300接近目标物体M,然后软夹持单元300夹持目标物体M,如图21B所示。
图22是示出根据本发明又一示例性实施例的夹持装置的保持单元的立体图。图23是示出图22的保持单元的剖视图。
根据本示例性实施例的夹持装置与参照图21A和图21B示出的夹持装置除保持单元801之外基本相同。因此相同的附图标记用于相同的元件并且将省略任何重复的解释。
参考图22和图23,在根据本示例性实施例的夹持装置中,保持单元801包括吸盘810、柔性支撑部815、固定座820、吸力发生器840和连接线830。
吸盘810包括侧壁811和由侧壁811分隔的多个抽吸单元813。
侧壁811可以包括柔性材料,并且抽吸单元813穿过吸盘810。抽吸单元813的两端是敞开的。
向抽吸单元813的内部空间提供吸力。目标物体与吸盘810的第一端接触,并且当从吸盘810的第二端提供吸力时,目标物体被附接到吸盘810上。
侧壁811包括阻止空气渗透的材料。例如,侧壁810可以包括柔性聚合物。因此,提供到抽吸单元之一中的空气不会穿透侧壁811,并且防止被提供给相邻的抽吸单元。
每个侧壁811的厚度基本相同。各吸附单元813的截面形状为三角形、长方形、六边形等多边形,各吸附单元813的形状及大小基本相同。例如,吸盘810可具有蜂窝结构。
因此,通过侧壁811分隔抽吸单元813,并因此可以减少抽吸单元813之间的空隙并且可以增加附接面积。因此,可以更有效地执行附接。
柔性支撑部815填充于抽吸单元813的内部空间中。由于从抽吸单元813的第一端到抽吸单元813的第二端提供吸力,因此通过吸力将目标物体附接到抽吸单元813的第一端。此处,当目标对象附接时,抽吸单元813的第一端被目标对象加压和变形。当目标物体的表面不规则时,抽吸单元813的第一端的与目标物体的表面间隔开的部分由于吸力可设置在抽吸单元813的内部空间内。因此,柔性支撑部815将抽吸单元813支撑在抽吸单元813内,以防止抽吸单元813的第一端的部分布置在抽吸单元813的内部空间内。
可以在抽吸单元813的内部填充柔性支撑部815,但是抽吸单元813的第一端可具有其中未填充柔性支撑部815的空间。因此,柔性支撑部815可以不支撑侧壁811的第一端811a。侧壁811的第一端811a紧密地附接到目标物体的表面,并且充当吸盘以阻挡抽吸单元813。此时,如果侧壁811的第一端811a没有受到柔性支撑部815的支撑,则侧壁811的变形不受限制,侧壁811因而可以更有效地附接到目标物体的表面。侧壁811的第一端811a的未被柔性支撑部815支撑的长度被确定为使得即使侧壁811的第一端811a被设置在抽吸单元813的内部空间内,抽吸单元813也不被阻塞或封闭。例如,如果抽吸单元813具有圆形截面形状,则侧壁811的未被柔性支撑部815支撑的第一端811a的长度可以小于抽吸单元813的半径,如图24A所示。
柔性支撑部815包括气孔,使得当提供吸力时向抽吸单元813中提供外部空气。例如,柔性支撑部815可以是海绵。
固定帽820连接到吸盘810的第二端。固定帽820包括分别连接到抽吸单元813的通孔821。
吸力发生器840产生吸力。
连接线830将吸力发生器840与固定盖820连接,以将吸力发生器840产生的吸力引导到吸盘810的每个抽吸单元813中。
在本示例性实施例中,连接线830可以是多个。连接线830的第一端连接到吸力发生器840,连接线830的第二端连接到每个通孔821。来自吸力发生器840的吸力通过连接线830均匀地提供给每个抽吸单元813。
尽管图中未示出,保持单元801在图23中的A部处可能包括止回阀。止回阀可以设置在连接管线830上,并且可以控制每个连接管线830的打开或关闭。
连接线830分别连接到抽吸单元813,并且每个连接线830被独立控制。因此,提供给每个抽吸单元813的吸力也被独立控制。
图24A是示出使用图22的保持单元的夹持状态的示意图,以及图24B是示出传统夹持装置的夹持状态的示意图。
参考图24A,当目标物体80被附接到吸盘810的第一端时,目标物体80对吸盘810的第一端加压。
在本示例性实施例中,吸盘810具有被侧壁811分隔的抽吸单元813,与目标物体80接触的抽吸单元813a被目标物体80加压和变形,但剩余的抽吸单元813b没有变形。此外,大部分被目标物体80推动的部分814与目标物体80的表面接触。
相比之下,参考图24B,在具有海绵形状的传统夹持单元40中,当目标物体80向夹持单元40加压时,夹持单元40的表面41被完全压缩并且与目标物体80直接接触的部分42相对较小。因此,在根据本示例性实施例的吸盘810中,与目标物体80直接接触的部分比传统的夹持单元40更大,因而施加到目标物体80的吸力可能更大。
此外,由于在传统的海绵形状夹持单元40中所有的气孔都连通,因而施加到目标物体80的吸力可能会减小。相比之下,在本示例性实施例中,阻挡空气穿透侧壁811,因而施加到特定抽吸单元813a的吸力仅用于夹持附接到特定抽吸单元813a的目标物体80。因此,可以更有效地向目标对象80施加吸力。
根据本示例性实施例,柔性罩由柔性支撑部支撑,并且通过将柔性罩的厚度形成得更薄来减少颗粒的量,使得可以更有效地将压紧力施加在物体上。因此,可以用减少的力容易地夹持物体,并且可以更容易地夹持易碎物体而不会损坏物体。
此外,由于使用颗粒来夹持而固定了变形的形状,因而即使物体是柔性的或具有不规则形状,也可以稳定且连续地保持夹持。此外,物体的形状或物体的强度可以不受限制。
另外,当柔性罩的变形达到预定压缩距离时,信号发生器生成变形完成信号,并且当生成信号时可以停止夹持操作,因而可以防止由于额外的不必要的夹持力而损坏物体。
此外,将第二刚性变形体添加到第一刚性变形体,以防止第一刚性变形体进一步变形或沿着第二方向移动。这里,第一刚性变形体沿第一方向的刚度相较于沿其他方向的刚度更大,第二刚性变形体沿第二方向的刚度相较于沿其他方向的刚度更大。因此,可以稳定且连续地夹持物体。
此外,可以由保持单元移动物体,以便软夹持单元夹持物体,因而无论物体的位置如何,都可以自动地夹持物体。
这里,保持单元被多个抽吸单元划分为多个空间,从而减小抽吸单元之间的空间并且增加整个抽吸面积,以提高抽吸效率。
进一步地,当与物体接触的抽吸单元因物体形状的压力而变形时,抽吸单元中被物体挤压的部分与物体的表面接触,因此抽吸单元和物体之间的接触面积可以增加。因此,可以增加施加到物体的吸力。此外,由于吸附单元中填充了多孔柔性支撑材料,每个吸附单元更有效地为物体提供吸力。
虽然已经描述了本发明的示例性实施例,但是应当理解,本发明不应限于这些示例性实施例,而是本领域的普通技术人员可以在如权利要求所述的本发明的精神和范围内进行各种改变和修改。
- 软夹持单元、包括软夹持单元的夹持装置及夹持装置驱动方法
- 顶部驱动单元、管子夹持装置以及钻出井筒的方法