一种全自动垃圾桶输送装置及输送方法
文献发布时间:2023-06-19 12:18:04
技术领域
本发明涉及一种垃圾桶发放装置,特别涉及一种全自动垃圾桶输送装置及输送方法。
背景技术
垃圾桶是人们日常生活中必不可少的一样生活刚需,当今我们处于一个信息化的时代,如何根据某个小区内用户的垃圾情况,运用智能垃圾桶可以进行信息收集与数据分析,是否能够针对这些信息带来经济效益,同时能够提高用户的幸福指数,因为有哪些需求,用户能够在小区周围快速的得到满足,根据用户的垃圾使用情况,我们将这些情况做数字化的分析。传统的垃圾回收方式,如果是在小区内,这些垃圾实际上是统一化处理,针对可回收的垃圾可以二次利用。这种智能垃圾回收装置中的垃圾桶输送装置部分是一种向用户发放垃圾桶的装置,我们将为每一个用户配置垃圾桶,垃圾桶罗列在箱体内,用户每次将垃圾桶放入垃圾投放点,然后用户在箱体处领取新的垃圾桶,只需用户点击一下箱体的界面,那么垃圾桶的输送装置开始启动,垃圾桶开始下放,用户进行领取,如何确保垃圾桶的输送装置能够正常运行,即垃圾桶不出现卡顿、能够快速的完成下放过程。
发明内容
要解决的技术问题
本发明要解决的技术问题是提供一种结构紧凑、操作方便、运行稳定且可靠的全自动垃圾桶输送装置及输送方法。
解决问题的技术方案
本发明提供一种全自动垃圾桶输送装置,其包括:
输送通道100,所述输送通道100垂直设置且用于容纳上下依次叠放的垃圾桶8;
桶体分离装置,与一控制器电连接,所述桶体分离装置安装在所述输送通道100的侧壁,用于将位于所述输送通道100最下端的垃圾桶分离、并使其从输送通道下端的出口端排出。
进一步的,所述桶体分离装置包括分离机构,所述分离机构至少为两个且周向均布在所述输送通道的侧壁。
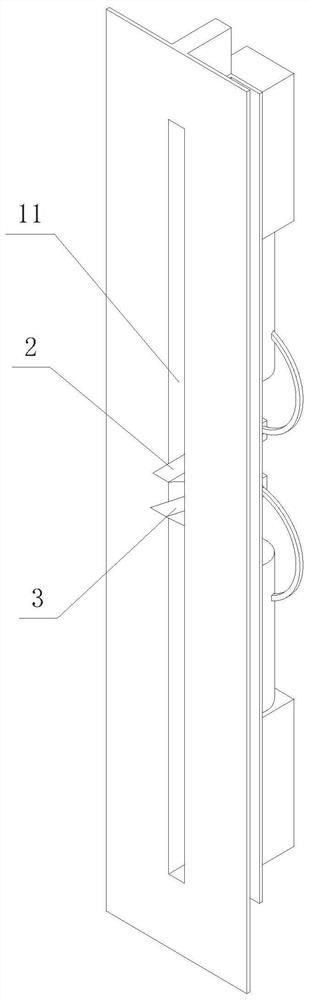
进一步的,所述分离机构包括上支撑块2、位于所述上支撑块2下方的下支撑块3、与所述上支撑块2连接的上驱动器4、及与所述下支撑块3连接的下驱动器5,所述上驱动器4能驱动所述上支撑块2进入所述输送通道并与垃圾桶侧壁的支承部81接触以阻断该工位上的输送通道内的垃圾桶的下落;所述下驱动器5能驱动所述下支撑块3进入所述输送通道并与垃圾桶侧壁的支撑部接触以阻断该工位上的输送通道内的垃圾桶的下落;所述上支撑块与所述下支撑块之间的距离小于叠放时相邻两垃圾桶之间的距离。
进一步的,所述上支撑块2和所述下支撑块3转动地安装在所述输送通道外壁;所述上支撑块2和所述下支撑块3的侧壁设有能随转动而进入输送通道的凸起,所述凸起形成用于与垃圾桶侧壁的支承部接触并阻断该垃圾桶下落的支撑部21、31,所述上驱动器和所述下驱动器分别与所述上支撑块、所述下支撑块连接并用于驱动其转动、并使所述支撑部进入或退出所述输送通道。
进一步的,所述上支撑块2、所述下支撑块3的侧壁设有用于与上驱动器或所述下驱动器连接的连接部。
进一步的,所述上支撑块2和所述下支撑块3滑配在所述输送通道外壁,所述上支撑块2和所述下支撑块3的头部形成用于与垃圾桶侧壁的支承部接触并阻断该垃圾桶下落的支撑部,所述上驱动器和所述下驱动器分别与所述上支撑块、所述下支撑块连接并用于驱动其滑动、并使所述支撑部进入或退出所述输送通道。
进一步的,所述上驱动器、所述下驱动器为所述气缸或推杆电机或推拉电磁铁。
进一步的,还包括周向均布的至少三个导轨1,所述导轨1之间形成所述输送通道,所述桶体分离装置安装在所述导轨1上。
同时,本发明还提供一种全自动垃圾桶输送方法,其包括以下步骤:
S1、控制装置接收到输送垃圾桶的指令;
S2、上驱动器4动作,驱动上支撑块2运动并使上支撑块2上的支撑部移动至输送通道外,以使该支撑部21与第一垃圾桶侧壁的支承部脱离,进而使该工位上的第一垃圾桶及其上方叠放的垃圾桶整体下落;
S3、一次下落后第一垃圾桶侧壁的支承部与下支撑块上的支撑部接触,第一垃圾桶及其上方叠放的垃圾桶停止下落;
S4、上驱动器4反向动作,驱动上支撑块2反向运动并使上支撑块2上的支撑部移动至输送通道内,该支撑部位于第一垃圾桶及该第一垃圾桶上方的第二垃圾桶的支承部81之间;
S4、下驱动器5动作,驱动下支撑块3运动并使下支撑块3上的支撑部移动至输送通道外,以使该支撑部31与第一垃圾桶侧壁的支承部脱离,进而使该工位上的第一垃圾桶下落并从输送通道下端的出料口排出;
同时,位于第一垃圾桶上方的第二垃圾桶下落并与上支撑块上的支撑部接触,进而阻断第二垃圾桶的继续下落;
S5、下驱动器5反向动作,驱动下支撑块3反向运动并使下支撑块3上的支撑部移动至输送通道内,实现复位;
S6、完成。
有益效果
本发明全自动垃圾桶输送装置,结构紧凑,体积小,输送通道同时作为储存空间,用于存储叠放的垃圾桶,减少了垃圾桶占用空间,提高了垃圾桶的存放数量;通过在输送通道侧壁设置桶体分离装置,能将最下方的垃圾桶独立分离并从输送通道内排出,完成投放,操作简单,且运行稳定;分离装置采用上下设置的支撑块及用于驱动支撑块动作的驱动器,结构紧凑,制造成本低,机构少,可靠性好,强度高;支撑块可采用不同的运动方式,适用于不同类型、规格的垃圾桶,适用范围广;设置限位机构,运行精度高,同时能避免运动过行程,进一步提高运行的可靠性和稳定性;设置垃圾桶检测装置,能实现对垃圾桶的数量监控,避免在无桶可投的情况下空运行;本发明全自动垃圾桶输送装置,结构紧凑,运行可靠,投放稳定,且效率高。
附图说明
图1为本发明全自动垃圾桶输送装置的分离机构的结构示意图;
图2为本发明全自动垃圾桶输送装置的分离机构的剖视图;
图3为用于本发明全自动垃圾桶输送装置的垃圾桶;
图4为本发明全自动垃圾桶输送装置的结构示意图;
图5为本发明全自动垃圾桶输送装置的工序一的状态示意图;
图6为本发明全自动垃圾桶输送装置的工序二的状态示意图;
图7为本发明全自动垃圾桶输送装置的工序三的状态示意图;
图8为本发明全自动垃圾桶输送装置的工序四的状态示意图;
具体实施方式
下面结合附图,详细介绍本发明实施例。
参阅图1-图8,本发明提供一种全自动垃圾桶输送装置,用于自动发放垃圾桶8,垃圾桶8的结构参阅图3,其包括垃圾桶本体,垃圾桶本体的侧壁具有一定的斜度,呈上大下小的结构,即该垃圾桶本体整体呈圆台形,其便于垃圾桶叠放(重叠放置),在垃圾桶的侧壁上方设有环形凸起,该环形凸起形成支承部81,同时在垃圾桶的侧壁设有多个条形凸起82,该条形凸起的长度方向平行于垃圾桶的轴线方向,该条形凸起位于环形凸起下端,其作为限位部用于在叠放时使上下两个垃圾桶之间的形成一定的间隙,在叠放时,上垃圾桶侧壁的条形凸起与其下方的垃圾桶内壁接触,上垃圾桶无法继续下移,进而实现了对叠放时垃圾桶之间的距离的限制,叠放时,相邻两个垃圾桶上的支承部之间的距离相同。
本发明全自动垃圾桶输送装置设置在一箱体(图中未示出)内,在箱体的侧壁设有触控屏,用于在取桶时操作;同时在箱体的侧壁的下方设有取料(桶)口;垃圾桶输送装置主要包括输送通道和桶体分离装置,以下分别对其结构进行详细说明;
输送通道100垂直设置,其用于容纳上下依次叠放的垃圾桶8;输送通道的孔径大于输送通道的外径,为了提高输送的顺畅性,同时避免间隙过大而产生倾斜,输送通道孔径与垃圾桶外壁(环形凸起)直径的差值为0.5cm-1cm;该输送通道的构成可以由多种形式:
可以包括一垂直设置的筒体,筒体内形成该输送通道100;
也可以由至少三个导轨构成,三个导轨相互平行,且不位于同一平面上,优选的,导轨周向均布,在导轨之间形成输送通道100。
桶体分离装置设置在输送通道外壁,即设置在筒体外壁或导轨外壁,该桶体分离装置与一控制器电连接,该控制器与触控屏连接,桶体分离装置用于将位于输送通道100最下端的垃圾桶分离,并使其从输送通道下端的出口端排出,进而完成垃圾桶的发放。
具体的,桶体分离装置包括至少两个周向均布的分离机构,优选的,周向均布有三个分离机构。
每个分离机构包括上支撑块2、下支撑块3、上驱动器4和下驱动器5,在上支撑块2的侧壁设有第一支撑部21,在下支撑块3的侧壁设有第二支撑部32,上驱动器4作为动力端与上支撑块2连接,用于驱动上支撑块2动作,使上支撑块2的第一支撑部21进入或退出输送通道,当第一支撑部21进入输送通道时,位于该工位上方的垃圾桶下落一定距离后,垃圾桶侧壁的支承部下端与该第一支撑部21接触,无法继续下落,即阻断了该工位上的垃圾桶的下落;当第一支撑部位于输送通道外时,位于该工位或其上方的垃圾桶能实现自由下落;下驱动器5作为动力端与下支撑块3连接,用于驱动下支撑块3动作,使下支撑块3的第二支撑部31进入或退出输送通道,当第二支撑部31进入输送通道时,位于该工位上方的垃圾桶下落一定距离后,垃圾桶侧壁的支承部下端与该第二支撑部31接触,无法继续下落,即阻断了该工位上的垃圾桶的下落;当第二支撑部位于输送通道外时,位于该工位或其上方的垃圾桶能实现自由下落;上支撑块与下支撑块之间的距离(沿输送通道长度方向)小于叠放的相邻两个垃圾桶的支承部之间的距离。
上支撑块和下支撑块的动作形式可以为多种,以下对不同的运动形式进行举例说明;
实施例一,上支撑块2和下支撑块3通过销轴转动地安装在输送通道的外壁,具体的,其安装在筒体或导轨外壁,本实施例中,上支撑块2和下支撑块3的转动轴线垂直于输送通道的轴线;同时在输送通道的侧壁开设有一条形槽11,该条形槽11的长度方向平行于输送通道的长度方向,其能容上支撑块或下支撑块上的支撑部进入或退出,在上支撑块2的侧壁设有一凸起并形成第一支撑部21,该支撑部21为三角形或长方形,其端部为锥形且倒圆,避免在运动过程中划伤垃圾桶外壁;在下支撑块2的侧壁也设有一凸起并形成第二支撑部31,该第二支撑部结构与第二支撑部结构相同;同时在上支撑块2、下支撑块3的侧壁或在销轴上设有连接部,该连接部位于输送通道外,用于与驱动器连接;本实施例中,驱动器为气缸或推杆电机或推拉电磁铁,驱动器的长度方向平行于输送通道的长度方向,进而减小了安装空间;驱动器能产生一个轴向推力,其输出端设有连接件,该连接件铰接在上支撑块或下支撑块的连接部上,通过驱动器输出轴的伸缩,推动上支撑块或下支撑块的转动,进而使上支撑块或下支撑块上的支撑部进入或退出输送通道。
也可以通过旋转气缸或电机直接与销轴连接,通过旋转气缸或电机的转动而带动上支撑块2或下支撑块3的转动。
实施例二,在本实施例中,上支撑块2和下支撑块3滑配在输送通道的外壁,其滑动方向垂直于输送通道的长度方向,上支撑块2和下支撑块3的头部形成用于与垃圾桶上的支承部接触的第三支撑部,上驱动器与上支撑块连接,并用于驱动其水平滑动,推动上支撑块2上的第三支撑部进入或退出输送通道;下驱动器与下支撑块连接,用于驱动其水平滑动,推动下支撑块3上的第三支撑部进入或退出输送通道;本实施例中,上支撑块或下支撑块的尾部与驱动器连接。
上支撑块2和下支撑块3的安装方式不限于上述两种,还可以通过水平转动、斜楔或齿轮等方式实现运动。
为了提高上支撑块2和下支撑块3的运动的精度,同时避免运动过行程,在输送通道的外壁设置有限位块,上支撑块和下支撑块上均设有两个限位块,分别位于上支撑块或下支撑块的两个运动极限位上。
为了避免其在无垃圾桶的情况下空运行,在输送通道的侧壁还设有用于检测垃圾桶状态的检测装置,该检测装置可以为传感器,如红外传感器、重量传感器,也可以为接触开关、微动开关等,当输送通道内无垃圾桶或垃圾桶数量少于阈值时,检测装置发出报警信号给控制器,控制器反馈信号至触控面板或远程端,提示内部垃圾桶数量不足,以便及时补充。
本发明还提供一种垃圾桶输送方法,用于自动发放垃圾桶,其包括以下步骤:
S1、当需要新的垃圾桶时,通过操作箱体上的触控屏,使触控屏发出需求信号,该需求信号传递至与其连接的控制器,控制器接收到该输送垃圾桶的指令,对驱动器发出信号并使驱动器动作;
S2、上驱动器4动作并驱动上支撑块2运动,使上支撑块2上的支撑部移动至输送通道外,以使该支撑部21与第一垃圾桶侧壁的支承部脱离,第一垃圾桶失去上支撑块的支撑后,在重力作用下,该工位上的第一垃圾桶及其上方叠放的垃圾桶整体下落,参阅图5;
S3、一次下落后第一垃圾桶侧壁的支承部与下支撑块上的支撑部接触,第一垃圾桶受到下支撑块的支撑后,第一垃圾桶及其上方叠放的垃圾桶停止下落;
S4、上驱动器4反向动作,驱动上支撑块2反向运动,使上支撑块2上的支撑部移动至输送通道内,该支撑部位于第一垃圾桶及该第一垃圾桶上方的第二垃圾桶的支承部81之间,参阅图6;
S4、下驱动器5动作,驱动下支撑块3运动,使下支撑块3上的支撑部移动至输送通道外,以使该支撑部31与第一垃圾桶侧壁的支承部脱离,第一垃圾桶失去下支撑块的支撑后,在重力作用下,该工位上的第一垃圾桶下落,该下落的第一垃圾桶最终从输送通道下端的出料口排出,用户可以从箱体侧壁的取料口将其取出;
同时,随着第一垃圾桶的下落,叠放在其上方的第二及其它垃圾桶也随之下落,当第二垃圾桶下落至上支撑块所在的工位时,垃圾桶侧壁的支承部与上支撑块上的支撑部接触,第二垃圾桶受到上支撑块的支撑后,无法继续下落,即上支撑块阻断了第二垃圾桶的继续下落,因此,第二垃圾桶及其上方叠放的垃圾桶整体停止下落,此时第二垃圾桶位于最下端,进而成为第一垃圾桶,参阅图7;
S5、下驱动器5反向动作,驱动下支撑块3反向运动并使下支撑块3上的支撑部移动至输送通道内,完成复位,参阅图8;在复位状态下,上支撑块和下支撑块的支撑部均位于输送通道内;
S6、垃圾桶发放完成。
以上步骤S1-S6为一个发放流程,每次发放时重复步骤S1-S6。
本发明全自动垃圾桶输送装置,结构紧凑,体积小,输送通道同时作为储存空间,用于存储叠放的垃圾桶,减少了垃圾桶占用空间,提高了垃圾桶的存放数量;通过在输送通道侧壁设置桶体分离装置,能将最下方的垃圾桶独立分离并从输送通道内排出,完成投放,操作简单,且运行稳定;分离装置采用上下设置的支撑块及用于驱动支撑块动作的驱动器,结构紧凑,制造成本低,机构少,可靠性好,强度高;支撑块可采用不同的运动方式,适用于不同类型、规格的垃圾桶,适用范围广;设置限位机构,运行精度高,同时能避免运动过行程,进一步提高运行的可靠性和稳定性;设置垃圾桶检测装置,能实现对垃圾桶的数量监控,避免在无桶可投的情况下空运行;本发明全自动垃圾桶输送装置,结构紧凑,运行可靠,投放稳定,且效率高。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种全自动垃圾桶输送装置及输送方法
- 一种适用于稳定输送的全自动塑封机自动输送装置