涡流检测爬行蜘蛛人
文献发布时间:2023-06-19 12:22:51
技术领域
本发明属于爬行机器人技术领域,具体是一种用于石油化工厂加热炉炉管涡流检测的爬行蜘蛛人。
背景技术
目前,多数涡流检测探头是由手动推行进行检测,通过伸缩杆进行上下移动的方式实现炉管检测的目的,还可以准确定位管壁上的缺陷位置。
这种检测方式会造成检测标准有误差。手动方式进行上下移动机器人可能会造成移动速度不均衡使其检测标准受到较大的误差,从而使检测不够准确。
为了克服手动方式检测的缺点,目前有一些采用机器进行检测的,但是其通常都是大型的机械设备,不便于对狭小的空间进行检测,针对现有技术的缺点,目前尚没有解决方案。
发明内容
针对相关技术中的上述技术问题,本发明提出涡流检测爬行蜘蛛人,能够克服现有技术的上述不足。
为实现上述技术目的,本发明的技术方案是这样实现的:
涡流检测爬行蜘蛛人,包括蜘蛛人框架,所述蜘蛛人框架的上端连接有主动V型挂胶轮,所述主动V型挂胶轮通过同步带连接有伺服电机,所述伺服电机连接有远程控制终端,所述蜘蛛人框架的下端连接有从动V型挂胶轮,所述主动V型挂胶轮和所述从动V型挂胶轮之间的蜘蛛人框架上连接有检测模块。
进一步的:所述伺服电机的电机轴上固定连接有带轮一,所述主动V型挂胶轮的电机轴上连接有带轮二,所述同步带套设在所述带轮一和所述带轮二之间。
进一步的:所述蜘蛛人框架的上端开设有安装槽一,所述主动V型挂胶轮的轮轴通过滚珠轴承与所述安装槽一连接。
进一步的:所述蜘蛛人框架的下端开设有安装槽二,所述从动V型挂胶轮的轮轴通过滚珠轴承与所述安装槽二连接。
进一步的:所述检测模块通过连接杆与所述蜘蛛人框架连接。
进一步的:所述连接杆包括内杆和外套杆,所述内杆与所述蜘蛛人框架连接,所述内套杆与所述检测模块连接。
进一步的:所述检测模块通过弹性绳与所述蜘蛛人框架连接。
本发明公开了涡流检测爬行蜘蛛人,具有如下有益效果:
1、可以到达人工工作不到的地方进行工作,从而大大减轻了工作量;
2、本发明与手动检测方式相比大大减轻了人工劳动力,提高生产效率,提高了检测结果的准确性;
3、本发明采用伺服电机加同步带进行传动运行,而伺服电机运行震动小,传动精度高可以准确识别位置缺陷高度。
附图说明
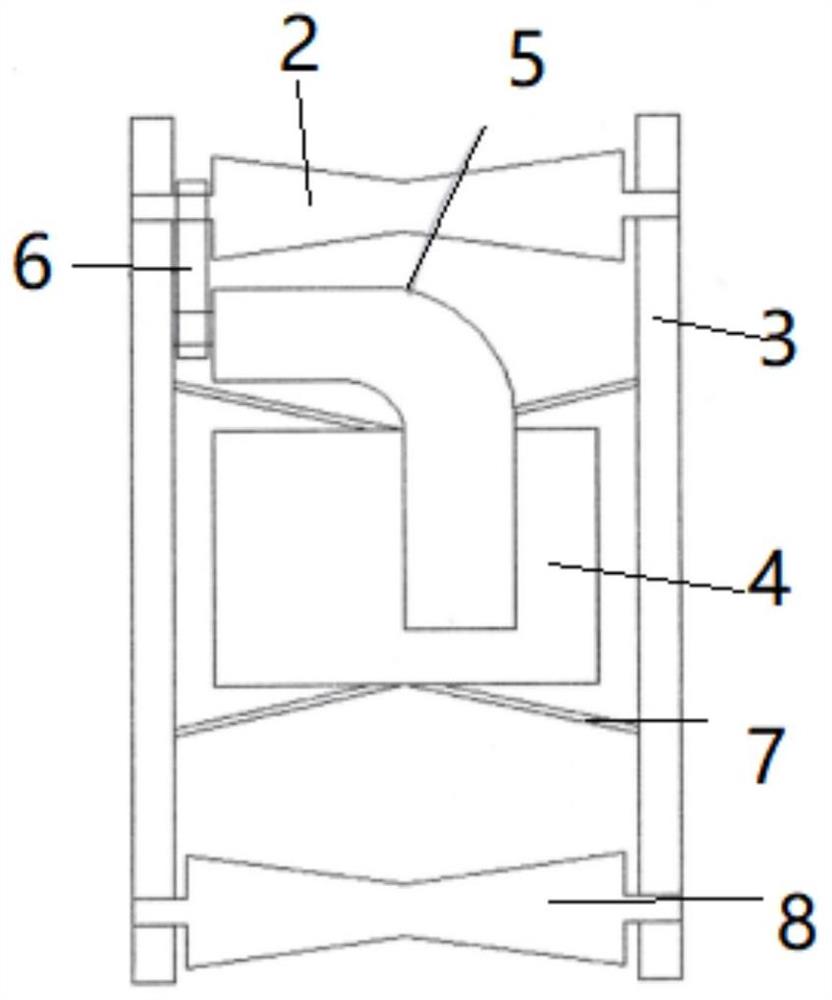
图1是本发明涡流检测爬行蜘蛛人的结构示意图;
图2是本发明涡流检测爬行蜘蛛人具体使用时的示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
涡流检测爬行蜘蛛人,如图1所示,包括蜘蛛人框架3,所述蜘蛛人框架3的上端连接有主动V型挂胶轮2,所述主动V型挂胶轮2通过同步带6连接有伺服电机5,所述伺服电机5连接有远程控制终端,所述蜘蛛人框架3的下端连接有从动V型挂胶轮8,所述主动V型挂胶轮2和所述从动V型挂胶轮8之间的蜘蛛人框架3上连接有检测模块4。
在本发明的上述实施例中,蜘蛛人框架3的上端连接主动V型挂胶轮2,主动V型挂胶轮2通过同步带6连接伺服电机5,伺服电机5连接有远程控制终端,再具体使用时,如图2所示,将机器人整体与外管壁贴合后,操作者可以在远处通过远程控制终端控制伺服电机5启动,伺服电机5启动带动同步带6转动从而带动主动V型挂胶轮2沿着炉管1的管壁爬行,带动机器人框架3和检测模块4沿着管壁爬行,检测模块4可以采用目前现有的,例如采用和手工通过伸缩杆检测时相同的模块即可。
在本发明的上述实施例中,检测模块连接在框架上,框架沿着管壁爬行,操作者只需要通过远程控制即可,可以显著降低劳动力,提高检测的效率和精度。
在本发明的一个具体实施例中:所述伺服电机5的电机轴上固定连接有带轮一,所述主动V型挂胶轮2的电机轴上连接有带轮二,所述同步带6套设在所述带轮一和所述带轮二之间,所述蜘蛛人框架3的上端开设有安装槽一,所述主动V型挂胶轮2的轮轴通过滚珠轴承与所述安装槽一连接,所述蜘蛛人框架3的下端开设有安装槽二,所述从动V型挂胶轮8的轮轴通过滚珠轴承与所述安装槽二连接。在本发明的上述实施例中,主动V型挂胶轮2和从动V型挂胶轮8均通过滚珠轴承与机器人框架连接,可以减小主动V型挂胶轮2和从动V型挂胶轮8的轮轴与机器人框架之间的摩擦力,提高机器人的运动精度。
在本发明的一个具体实施例中:所述检测模块4通过连接杆7与所述蜘蛛人框架3连接,所述连接杆包括内杆和外套杆,所述内杆与所述蜘蛛人框架连接,所述内套杆与所述检测模块连接。在本实施例中,机器人框架和检测模块之间通过伸缩连接杆连接,可以缓冲机器人框架传递至检测模块的震动,降低检测模块受到的外界干扰,提高检测模块的检测精度。
在本发明的一个具体实施例中:所述检测模块4通过弹性绳与所述蜘蛛人框架3连接。在本实施例中,机器人框架和检测模块之间通过弹性绳连接,弹性绳同样可以缓冲机器人框架传递至检测模块的震动,降低检测模块受到的外界干扰,提高检测模块的检测精度。
为了方便理解本发明的上述技术方案,以下通过具体使用方式上对本发明的上述技术方案进行详细说明。
具体使用时,如图2所示,将机器人放置在炉管的管壁后,通过远程控制终端启动伺服电机,伺服电机带动主动V型挂胶轮沿着管壁爬行,从动V型挂胶轮即跟随主动V型挂胶轮运动,从而带动机器人框架带着检测模块运动,检测模块沿着管壁运动,可以实现对管壁的检测。
综上所述,本发明公开了涡流检测爬行蜘蛛人,可以到达人工工作不到的地方进行工作,从而大大减轻了工作量;与手动检测方式相比大大减轻了人工劳动力,提高生产效率,提高了检测结果的准确性;采用伺服电机加同步带进行传动运行,而伺服电机运行震动小,传动精度高可以准确识别位置缺陷高度。
以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
- 涡流检测爬行蜘蛛人
- 一种基于管道爬行器的内窥涡流检测系统