混合动力车辆的控制系统及控制方法
文献发布时间:2023-06-19 13:27:45
技术领域
本公开涉及混合动力车辆的控制系统及控制方法。
背景技术
已知一种混合动力车辆,具备内燃机和电动机,运转模式在EV模式和HV模式之间切换,在所述EV模式中,内燃机的运转停止并且电动机运转,在所述HV模式中,内燃机和电动机运转,其中,在HV模式中,当蓄电池的充电率(SOC)低于预先确定的第一设定值时,为了发电而启动内燃机,并利用此时产生的电力对蓄电池进行充电。
但是,在蓄电池的SOC低于第一设定值时,内燃机的催化剂有可能处于非活化状态。在该情况下,当启动内燃机时,废气排放有可能增加。因此,公知一种混合动力车辆,在蓄电池的SOC低于比第一设定值高的第二设定值时,使用于对催化剂进行加热的电加热器工作(例如,参照日本特开2003-269208)。
发明内容
但是,已知有例如在市区设定应限制内燃机的运转的低排放区的技术(地理围栏)。在低排放区内,混合动力车辆通常通过电动机进行行驶、即以EV模式行驶。因此,即使考虑到再生控制,在低排放区内蓄电池的SOC也逐渐降低。因此,一旦混合动力车辆驶出低排放区,则有可能为了发电而立即启动内燃机。但是,此时催化剂有可能不处于活化状态。在日本特开2003-269208中关于该问题没有任何公开。
本公开提供以下的混合动力车辆的控制系统及控制方法。
本公开的第一方式涉及一种混合动力车辆的控制系统。所述混合动力车辆的控制系统包含:电加热器,构成为对所述内燃机的催化剂进行加热;位置判定部,构成为判定所述混合动力车辆是否处于应限制所述内燃机的运转的低排放区当中的与所述低排放区的边界相邻的出口区域内;及加热器控制部,构成为在判定为所述混合动力车辆处于所述出口区域内时,使所述电加热器工作。所述混合动力车辆具备内燃机和电动机。所述混合动力车辆的运转模式在EV模式和HV模式之间切换,在所述EV模式中,所述内燃机的运转停止并且所述电动机运转,在所述HV模式中,所述内燃机和所述电动机运转。
在上述第一方式中,所述加热器控制部也可以构成为,在判定为所述混合动力车辆的蓄电池的充电率为预先确定的阈值以上时,不使所述电加热器工作,在判定为所述蓄电池的充电率低于所述阈值时且判定为所述混合动力车辆处于所述出口区域内时,使所述电加热器工作。
在上述方式中,所述控制系统也可以还包含预测部,该预测部构成为对所述混合动力车辆是否会驶出到所述低排放区外进行预测。所述加热器控制部也可以构成为,在预测为所述混合动力车辆不会驶出到所述低排放区外时,不使所述电加热器工作,在预测为所述混合动力车辆会驶出到所述低排放区外时且判定为所述混合动力车辆处于所述出口区域内时,使所述电加热器工作。
在上述方式中,所述加热器控制部也可以构成为,在判定为所述混合动力车辆处于所述出口区域内时,在所述混合动力车辆到所述边界的距离长时,与所述距离短时相比,减少对所述电加热器的每单位时间的通电量。
在上述方式中,所述加热器控制部也可以构成为,在所述混合动力车辆驶出所述低排放区时,以使所述催化剂处于活化状态的方式使所述电加热器工作。
在上述方式中,所述加热器控制部也可以构成为,在判定为所述混合动力车辆处于所述出口区域内的情况下,在判定为根据所述混合动力车辆的蓄电池的充电率确定的可利用电能量比所述催化剂处于活化状态且所述混合动力车辆以所述EV模式驶出所述低排放区所需的必要电能量少时,与判定为所述可利用电能量比所述必要电能量多时相比,减少对所述电加热器的通电量。
在上述方式中,所述加热器控制部也可以构成为,在判定为所述可利用电能量比所述必要电能量少时,使对所述电加热器的通电量为0而不使所述电加热器工作。
在上述方式中,所述加热器控制部也可以构成为,在判定为所述可利用电能量比所述必要电能量少且比在不使所述电加热器工作的情况下所述混合动力车辆以所述EV模式驶出所述低排放区所需的区外必要电能量多时,将所述可利用电能量相对于所述区外必要电能量的超出量的一部分或全部向所述电加热器供给。
在上述方式中,所述控制系统也可以还包含引导部,该引导部构成为,在判定为所述可利用电能量比所述必要电能量少且比在不使所述电加热器工作的情况下所述混合动力车辆以所述EV模式到达所述低排放区内的充电设备所需的充电必要电能量多时,将所述混合动力车辆向所述充电设备引导。
在上述方式中,所述控制系统也可以还包含引导部,该引导部构成为,在判定为所述可利用电能量比所述必要电能量少且比在不使所述电加热器工作的情况下所述混合动力车辆以所述EV模式驶出所述低排放区所需的区外必要电能量多时,将所述混合动力车辆向所述低排放区外引导。
在上述方式中,所述引导部也可以构成为,将所述混合动力车辆向所述低排放区外引导。
本公开的第二方式涉及一种混合动力车辆的控制方法。所述混合动力车辆的控制方法包括如下步骤:判定所述混合动力车辆是否处于应限制所述内燃机的运转的低排放区当中的与所述低排放区的边界相邻的出口区域内;及在判定为所述混合动力车辆处于所述出口区域内时,使用于对所述内燃机的催化剂进行加热的电加热器工作。所述混合动力车辆具备内燃机和电动机。所述混合动力车辆的运转模式在EV模式和HV模式之间切换,在所述EV模式中,所述内燃机的运转停止并且所述电动机运转,在所述HV模式中,所述内燃机和所述电动机运转。
根据本公开的各方式,在混合动力车辆从低排放区驶出时,能够可靠地使催化剂处于活化状态,由此能够在混合动力车辆刚从低排放区驶出后迅速地使内燃机启动。
附图说明
下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业重要性,附图中相同的附图标记表示相同的元件,并且其中:
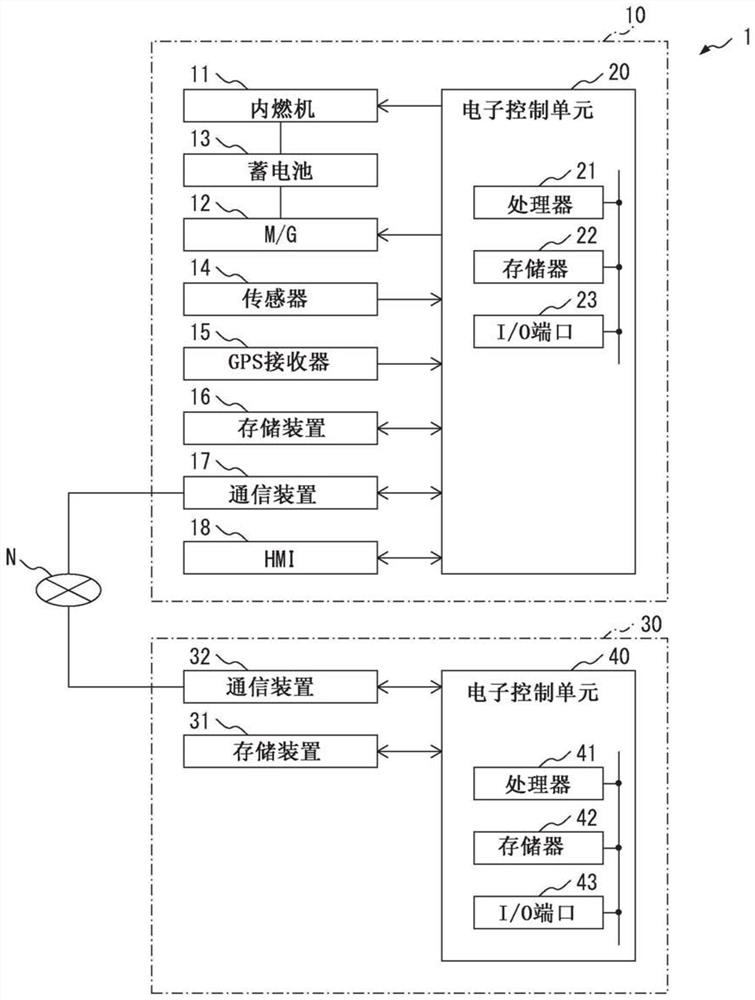
图1是本公开的第一实施例的控制系统的概略整体图。
图2是本公开的第一实施例的内燃机的概略图。
图3是本公开的第一实施例的低排放区的概略图。
图4是本公开的第一实施例中的车辆的功能框图。
图5是本公开的第一实施例中的服务器的功能框图。
图6是本公开的第一实施例的低排放区和出口区域的概略图。
图7是用于说明本公开的第一实施例的时序图。
图8是用于执行本公开的第一实施例的车辆控制例程的流程图。
图9是用于执行本公开的第一实施例的服务器控制例程的流程图。
图10是本公开的第二实施例中的车辆的功能框图。
图11是用于说明本公开的第二实施例的时序图。
图12是用于执行本公开的第二实施例的车辆控制例程的流程图。
图13是用于执行本公开的第二实施例的服务器控制例程的流程图。
图14是本公开的第三实施例中的服务器的功能框图。
图15是用于说明本公开的第三实施例的低排放区和出口区域的概略图。
图16是用于执行本公开的第三实施例的服务器控制例程的流程图。
图17是本公开的第四实施例中的服务器的功能框图。
图18是表示本公开的第四实施例中的通电量QHT的映射的线图。
图19是用于说明本公开的第四实施例的时序图。
图20是用于执行本公开的第四实施例的车辆控制例程的流程图。
图21是用于执行本公开的第四实施例的服务器控制例程的流程图。
图22是本公开的第五实施例中的车辆的功能框图。
图23是本公开的第五实施例中的服务器的功能框图。
图24是用于说明本公开的第五实施例的线图。
图25是用于说明本公开的第五实施例的概略图。
图26是用于执行本公开的第五实施例的服务器控制例程的流程图。
图27是用于执行本公开的第五实施例的服务器控制例程的流程图。
具体实施方式
参照图1至图9来说明本公开的第一实施例。参照图1,本公开的第一实施例的混合动力车辆的控制系统1具备混合动力车辆10和混合动力车辆10的外部的服务器30。
本公开的第一实施例的混合动力车辆10具备内燃机11和电动发电机(M/G)12、蓄电池13、至少一个传感器14、GPS接收器15、存储装置16、通信装置17、HMI(人机接口)18及电子控制单元20。
本公开的第一实施例的内燃机11例如由火花点火式内燃机或压燃式内燃机构成。如图2所示,本公开的第一实施例的内燃机11具备:内燃机主体11a;与内燃机主体11a连结的排气管11b;与排气管11b连结的壳体11c;与壳体11c连结的排气管11d;收纳在壳体11c内的催化剂11e;及用于加热催化剂11e的电加热器11f。在图2所示的例子中,电加热器11f安装于催化剂11e的周面。当电加热器11f工作时、即对电加热器11f通电时,催化剂11e被加热,例如使催化剂11e成为活化状态。在另一例中,电加热器11f配置于催化剂11e的上游,以对流入催化剂11e的废气进行加热。在该情况下,催化剂11e被由电加热器11f加热后的废气加热。内燃机11(例如,燃料喷射阀、火花塞、节气门等)基于来自电子控制单元20的信号被控制。
此外,本公开的第一实施例的电动发电机12作为电动机或发电机进行工作。电动发电机12基于来自电子控制单元20的信号被控制。
在本公开的第一实施例中,能够在EV模式和HV模式之间切换混合动力车辆10的运转模式。在本公开的第一实施例的EV模式中,内燃机11停止并且电动发电机12作为电动机运转。在该情况下,电动发电机12的输出传递到车轴。另一方面,在本公开的第一实施例的HV模式中,内燃机11运转并且电动发电机12作为电动机运转。在该情况下,在一例中,内燃机11的输出及电动发电机12的输出传递到车轴。在另一例中,电动发电机12的输出传递到车轴,内燃机11的输出传递到发电机(未图示),发电机工作。由发电机产生的电力输送到电动发电机12或蓄电池13。在又一例中,内燃机11的输出的一部分和电动发电机12的输出传递到车轴,内燃机11的输出的剩余部分传递到发电机。由发电机产生的电力输送到电动发电机12或蓄电池13。另外,在本公开的第一实施例中,在EV模式及HV模式下,例如在减速运转时进行将电动发电机12用作发电机的再生控制。在再生控制中产生的电力输送到蓄电池13。
本公开的第一实施例的蓄电池13由来自作为发电机工作的电动发电机12或发电机(未图示)的电力充电。在另一实施例(未图示)中,蓄电池13也能够由外部电源充电。另一方面,在本公开的第一实施例中,电力从蓄电池13供给到内燃机11的电加热器11f、作为电动机工作的电动发电机12、电子控制单元20、其他车载设备。
本公开的第一实施例的传感器14检测各种原始数据。本公开的第一实施例的传感器14例如包含:用于检测由加速踏板的踩踏量表示的要求车辆负载的负载传感器;用于检测内燃机11的节气门开度的节气门开度传感器;用于检测内燃机11的废气中的NOx浓度的NOx传感器;用于检测催化剂11e的温度的温度传感器;用于检测内燃机11的转速的转速传感器;用于检测蓄电池13的电压和电流的电压计和电流计;及用于检测车辆10的速度的速度传感器等。这些传感器14的输出信号输入到电子控制单元20。
本公开的第一实施例的GPS接收器15接收来自GPS卫星的信号,由此检测表示车辆10的绝对位置(例如,经度和纬度)的信息。车辆10的位置信息输入到电子控制单元20。
在本公开的第一实施例的存储装置16预先存储有各种数据。本公开的第一实施例的通信装置17能够连接到诸如因特网那样的通信网络N。本公开的实施例的HMI18在车辆10的乘员(包含驾驶员)与控制系统1之间进行信息的交换。具体而言,HMI18具备对车辆10的乘员进行例如视觉性、听觉性、触觉性、嗅觉性的通知的通知功能和接受来自车辆10的乘员的输入的输入功能。HMI18包含用于通知功能的例如显示器、灯、扬声器、振动器等,并包含用于输入功能的触摸面板、按钮、开关等。在另一实施例(未图示)中,HMI18不具备输入功能而具备通知功能。
本公开的第一实施例的车辆10的电子控制单元20具备通过双向总线相互以能够通信的方式连接的一个或多个处理器21、一个或多个存储器22及输入输出(I/O)端口23。存储器22例如包含ROM、RAM等。在存储器22存储有各种程序,通过由处理器21执行这些程序来实现各种功能。在本公开的第一实施例的输入输出端口23,以能够通信的方式连接上述的内燃机11(包含电加热器11f)、电动发电机12、传感器14、GPS接收器15、存储装置16及通信装置17。另外,在本公开的第一实施例的处理器21中,蓄电池13的SOC例如基于蓄电池13的电压及电流来计算。
进一步参照图1,本公开的第一实施例的服务器30具备存储装置31、通信装置32及电子控制单元40。
在本公开的第一实施例的存储装置31存储有应限制内燃机11的运转的低排放区的位置信息(例如,纬度和经度)。图3示意性地示出了本公开的第一实施例的低排放区LEZ的一例。本公开的第一实施例的低排放区LEZ被封闭的边界或地理围栏GF包围。低排放区LEZ例如设定于市区。在低排放区LEZ之外的区域中、即在普通区GEZ中,不限制内燃机11的运转或允许内燃机11的运转。
本公开的第一实施例的通信装置32能够连接到通信网络N。因此,车辆10与服务器30能够经由通信网络N相互连接。
本公开的第一实施例的服务器30的电子控制单元40与车辆10的电子控制单元20同样地,具备通过双向总线相互以能够通信的方式连接的一个或多个处理器41、一个或多个存储器42及输入输出端口43。在本公开的第一实施例的输入输出端口43,以能够通信的方式连接有上述的存储装置31和通信装置32。
图4示出了本公开的第一实施例的车辆10的功能框图。参照图4,车辆10的电子控制单元20包含位置信息取得部20a、运转模式控制部20b及加热器控制部20c。
本公开的第一实施例的位置信息取得部20a从GPS接收器15取得车辆10的位置信息。另外,位置信息取得部20a将该位置信息发送到服务器30。
进一步参照图4,本公开的第一实施例的运转模式控制器20b构成为在EV模式和HV模式之间变更运转模式。在一例中,在要求车辆负载比预先确定的设定负载低时进行EV模式,在要求车辆负载为设定负载以上时将运转模式切换为HV模式。另外,在蓄电池13的SOC为预先确定的设定SOC以上时进行EV模式,在蓄电池13的SOC低于设定SOC时将运转模式切换为HV模式。
本公开的第一实施例的加热器控制部20c控制内燃机11的电加热器11f(图2)的工作或停止。在一例中,若在应启动内燃机11时催化剂11e为非活化状态,则电加热器11f工作、即向电加热器11f通电。接着,若内燃机11启动,则电加热器11f停止工作、即停止向电加热器11f的通电。另外,内燃机11在催化剂11e成为活化状态之前不启动,而在催化剂11e成为活化状态时启动。另一方面,在不应启动内燃机11时,或者在催化剂11e处于活化状态时,停止电加热器11f。另外,如后所述,加热器控制部20c按照车辆10接收到的指示数据,使电加热器11f工作或停止。
另一方面,图5示出了本公开的第一实施例的服务器30的功能框图。参照图5,服务器30的电子控制单元40包含位置判定部40a。
本公开的第一实施例的位置判定部40a根据从车辆10发送到服务器30的车辆10的位置信息和存储在存储装置31内的低排放区LEZ的位置信息,判定车辆10是否处于低排放区LEZ内。另外,位置判定部40a判定车辆10是否处于出口区域EXA(后述)内。而且,位置判定部40a创建与这些判定结果相应的指示数据,并将指示数据发送到车辆10。
在本公开的第一实施例中,如图6所示,低排放区LEZ被划分为与低排放区LEZ的边界GF或普通区GEZ相邻的出口区域EXA和比出口区域EXA靠内侧的内侧区域INA。因此,为了从低排放区LEZ向低排放区LEZ外、即普通区GEZ驶出,车辆10通过出口区域EXA。另外,在本公开的第一实施例中,出口区域EXA例如被划定为距边界GF的距离(例如行驶距离)比预先确定的阈值Dx短的区域。另外,在图6中,D表示从车辆10的当前位置到边界GF或普通区GEZ的距离(例如行驶距离)。
在本公开的第一实施例中,在判定为距离D比阈值Dx短时,判定为车辆10处于出口区域EXA内,在判定为距离D比阈值Dx长时,判定为车辆10处于出口区域EXA外、即处于内侧区域INA内。因此,阈值Dx可以认为是出口区域EXA的位置信息。
另外,在本公开的第一实施例中,当车辆10取得了车辆10的位置信息时,将车辆10的位置信息发送到服务器30。服务器30的位置判定部40a在接收到车辆10的位置信息时,根据接收到的车辆10的位置信息和存储在存储装置31中的低排放区LEZ的位置信息,判定车辆10是否处于低排放区LEZ内。在判定为车辆10处于普通区GEZ内时,位置判定部40a创建包含维持指示的指示数据,并发送到车辆10。
另一方面,在判定为车辆10处于低排放区LEZ内时,位置判定部40a根据车辆10的位置信息和出口区域EXA的位置信息,判定车辆10是否处于出口区域EXA内。在判定为车辆10处于出口区域EXA外、即处于内侧区域INA内时,位置判定部40a创建包含停止指示的指示数据,并发送到车辆10。与此相对,在判定为车辆10处于出口区域EXA内时,位置判定部40a创建包含工作指示的指示数据,并发送到车辆10。
当车辆10从服务器30接收到指示数据时,车辆10的加热器控制部20c判定接收到的指示数据所包含的指示的种类。在判定为指示数据包含维持指示时,加热器控制部20c维持电加热器11f的工作状态。即,在电加热器11f工作时使电加热器11f继续工作,在电加热器11f停止工作时使电加热器11f继续停止工作。与此相对,在判定为指示数据包含停止指示时,加热器控制部20c使电加热器11f停止工作。另一方面,在判定为指示数据包含工作指示时,加热器控制部20c使电加热器11f工作。
即,在图7所示的例子中,在时间ta1之前判定为车辆10处于低排放区LEZ的内侧区域INA内,此时按照停止指示,使电加热器11f的工作停止(通电量QHT=0)。接着,当在时间ta1判定为车辆10进入到出口区域EXA内时,按照工作指示,使电加热器11f工作(QHT>0)。在图7所示的例子中,对电加热器11f的每单位时间的通电量QHT为恒定量QHT1。其结果是,催化剂11e的加热开始。接着,当在时间ta2判定为车辆10驶出低排放区LEZ而进入到普通区GEZ内时,按照维持指示,维持电加热器11f的工作状态。在图7所示的例子中,电加热器11f继续工作。
在本公开的第一实施例中,如上所述,基于要求车辆负载和蓄电池13的SOC,将运转模式控制为EV模式或HV模式。因此,为了在低排放区LEZ内将运转模式维持为EV模式或不切换为HV模式,要求车辆10进行要求车辆负载(例如,加速踏板的踩踏量)的调节、蓄电池13的SOC的管理等。在另一实施例(未图示)中,当判定为车辆10处于低排放区LEZ内时,通过运转模式控制部20b自动地将运转模式切换为EV模式并维持。
总之,当车辆10处于低排放区LEZ内时,即使考虑到再生控制,蓄电池13的SOC也逐渐降低。因此,当车辆10驶出了低排放区LEZ时、即进入到普通区GEZ内时,存在为了发电而立即启动内燃机11的可能性。
关于这一点,在本公开的第一实施例中,当判定为车辆10进入到出口区域EXA内时、即在驶出低排放区LEZ之前,使电加热器11f工作。因此,能够在车辆10驶出出口区域EXA或低排放区LEZ之前,使催化剂11e处于活化状态。因此,在车辆10驶出低排放区LEZ后,能够确保催化剂11e的排气净化能力,并且能够使内燃机11立即启动。
本公开的第一实施例的加热器控制部20c使电加热器11f工作,使得在车辆10驶出低排放区LEZ时催化剂11e处于活化状态。其结果是,能够在车辆10刚驶出低排放区LEZ之后使内燃机11启动,并且降低直到内燃机11启动为止使催化剂11e处于活化状态所需的电力。
在本公开的第一实施例中,如上所述,当从车辆10到边界GF的距离D比阈值Dx短时,判定为车辆10进入到出口区域EXA内,使电加热器11f工作。因此,在本公开的第一实施例中,以在车辆10驶出低排放区LEZ时催化剂11e处于活化状态的方式设定阈值Dx。在一例中,根据催化剂11e的当前的温度、催化剂11e的活化温度、对电加热器11f的每单位时间的通电量QHT(例如上述的QHT1),计算使催化剂11e成为活化状态所需要的时间tR。接着,计算假定车辆10在时间tR内沿着预测行驶路线并且以预测速度行驶时的车辆10的移动距离,并将该移动距离设定为阈值Dx。预测行驶路线在一例中基于车辆10或其他车辆的行驶历史来决定。车辆10或其他车辆的行驶历史例如基于发送到服务器30的车辆10或其他车辆的位置信息来决定。在另一例中,预测行驶路线是将车辆10的导航系统(未图示)所决定的行驶路线从车辆10发送到服务器30,并基于行驶路线来决定的。预测车速在一例中基于车辆10或其他车辆的行驶历史来决定。在该情况下,预测速度例如作为车辆10的位置或时间的函数被决定。在另一例中,预测车速基于法定速度来决定。
图8示出了本公开的第一实施例中的用于执行车辆10中的控制的例程。该例程例如每隔预先确定的设定时间反复进行。参照图8,在步骤100中,取得车辆10的位置信息。在接下来的步骤101中,将车辆10的位置信息发送到服务器30。在接下来的步骤102中,判定是否从服务器30接收到指示数据。反复进行步骤102,直到判定为从服务器30接收到指示数据为止。当判定为从服务器30接收到指示数据时,接着进入步骤103,判定指示数据所包含的指示的种类。在判定为指示数据包含停止指示时,接着进入步骤104,使电加热器11f停止工作。在判定为指示数据包含工作指示时,接着进入步骤105,使电加热器11f工作。在判定为指示数据包含维持指示时,接着进入步骤106,维持电加热器11f的工作状态。
图9示出了本公开的第一实施例中的用于执行服务器30中的控制的例程。该例程例如每隔预先确定的设定时间反复进行。参照图9,在步骤200中,判定是否从车辆10接收到车辆10的位置信息。在判定为没有接收到车辆10的位置信息时,结束处理循环。当判定为接收到车辆10的位置信息时,进入步骤201,判定车辆10是否处于低排放区LEZ内。在判定为车辆10不处于低排放区LEZ内、即处于普通区GEZ内时,接着进入步骤202,创建包含维持指示的指示数据。接着进入步骤206。另一方面,在判定为车辆10处于低排放区LEZ内时,接着进入步骤203,判定车辆10是否处于出口区域EXA内。在判定为车辆10处于出口区域EXA内时,接着进入步骤204,创建包含工作指示的指示数据。接着进入步骤206。与此相对,在判定为车辆10不处于出口区域EXA内、即处于内侧区域时,接着进入步骤205,创建包含停止指示的指示数据。接着进入步骤206。在步骤206中,将指示数据发送到车辆10。
接着,参照图10至图13来说明本公开的第二实施例。本公开的第二实施例与本公开的第一实施例在如下方面不同。即,如图10所示,本公开的第二实施例的车辆10的电子控制单元20具备SOC取得部20d。SOC取得部20d例如从处理器21取得蓄电池13的SOC。
在上述的本公开的第一实施例中,当判定为车辆10处于出口区域EXA内时,使电加热器11f工作。其结果是,即使在车辆10刚驶出到低排放区LEZ外之后立即使内燃机11工作,也能够期待催化剂11e的排气净化功能。但是,在蓄电池13的SOC高时,在车辆10刚驶出到低排放区LEZ外之后,为了发电而使内燃机11工作的必要性低。
因此,在本公开的第二实施例中,在判定为车辆10处于低排放区LEZ内时,在蓄电池13的SOC为预先确定的阈值SOCx以上时,不使电加热器11f工作。与此相对,在蓄电池13的SOC低于阈值SOCx时,使电加热器11f工作。
即,在图11所示的例子中,在时间tb1之前判定为车辆10处于低排放区LEZ的内侧区域INA内,此时使电加热器11f的工作停止。接着,在时间tb1判定为车辆10进入到出口区域EXA内,此时如果判定为蓄电池13的SOC低于阈值SOCx,则如图11中实线所示,使电加热器11f工作。与此相对,当判定为蓄电池13的SOC为阈值SOCx以上时,如图11中虚线所示,不使电加热器11f工作。
图12示出了本公开的第二实施例中的用于执行车辆10中的控制的例程。对与图8所示的例程的不同点进行说明,在图12所示的例程中,接在步骤100之后进入步骤100a,取得蓄电池13的SOC。在接下来的步骤101a中,将车辆10的位置信息和蓄电池13的SOC发送到服务器30。
图13示出了本公开的第二实施例中的用于执行服务器30中的控制的例程。对与图9所示的例程的不同点进行说明,在图13所示的例程中,首先,在步骤200a中,判定是否从车辆10接收到车辆10的位置信息和蓄电池13的SOC。在判定为没有接收到车辆10的位置信息和SOC时,结束处理循环。当判定为接收到车辆10的位置信息和SOC时,进入步骤201。另外,在步骤201中判定为车辆10处于低排放区LEZ内时,接着进入步骤201a,判定蓄电池13的SOC是否低于阈值SOCx。在SOC<SOCx时,接着进入步骤203。与此相对,在SOC≥SOCx时,接着进入步骤205。
在上述的本公开的第二实施例中,由服务器30进行蓄电池13的SOC是否低于阈值SOCx的判定。在另一实施例(未图示)中,由车辆10进行该判定。在该情况下,不需要将蓄电池13的SOC发送到服务器30。
接着,参照图14至图16来说明本公开的第三实施例。本公开的第三实施例与本公开的第二实施例在如下方面不同。即,如图14所示,本公开的第三实施例的服务器30的电子控制单元40具备预测部40b。预测部40b对车辆10是否会驶出到低排放区LEZ外进行预测。
在上述的本公开的第二实施例中,当判定为车辆10从内侧区域INA移动到出口区域EXA时,使电加热器11f工作。其结果是,如图15中实线所示,在车辆10驶出到低排放区LEZ外时,能够预先使催化剂11e处于活化状态。但是,即使车辆10从内侧区域INA移动到出口区域EXA,如图15中虚线所示,车辆10也有可能不移动到低排放区LEZ外,而停留在低排放区LEZ内。在车辆10停留在低排放区LEZ内的情况下,内燃机11不工作,不需要使电加热器11f工作。
因此,在本公开的第三实施例中,预测车辆10是否会驶出到低排放区LEZ外,在预测为车辆10不会驶出到低排放区LEZ外时,不使电加热器11f工作。与此相对,在预测为车辆10会驶出到低排放区LEZ时,使电加热器11f工作。其结果是,能够有效利用电力。
在本公开的第三实施例中,车辆10是否会驶出到低排放区LEZ外的判定基于车辆10(本车辆)或其他车辆的行驶历史来进行。在一例中,基于车辆10或其他车辆的行驶历史,计算车辆10从当前位置驶出到低排放区LEZ外的概率。在判定为该概率为基准值以上时,判定为车辆10会驶出到低排放区LEZ外,在判定为该概率低于基准值时,判定为车辆10不会驶出到低排放区LEZ外。在另一实施例(未图示)中,车辆10的导航系统(未图示)所决定的行驶路线从车辆10发送到服务器30,基于该行驶路线来进行该判定。
图16示出了本公开的第三实施例中的用于执行服务器30中的控制的例程。对与图13所示的例程的不同点进行说明,在图16所示的例程中,在步骤201a中SOC<SOCx时,接着进入步骤201b,预测车辆10是否会驶出到低排放区LEZ外。在预测为车辆10会驶出到低排放区LEZ外时,接着进入步骤203。与此相对,在预测为车辆10不会驶出到低排放区LEZ外时,接着进入步骤205。
在上述的本公开的第三实施例中,由服务器30进行车辆10是否会驶出到低排放区外的判定。在另一实施例(未图示)中,由车辆10进行该判定。
接着,参照图17至图21来说明本公开的第四实施例。本公开的第四实施例与本公开的第三实施例在如下方面不同。即,在本公开的第四实施例中,如图17所示,本公开的第四实施例的服务器30的电子控制单元40具备通电量决定部40c。在使电加热器11f工作时,通电量决定部40c决定对电加热器11f的每单位时间的通电量QHT的目标值QHTtgt。在使电加热器11f工作时向车辆10发送的指示数据包含上述的工作指示和该目标值QHTtgt。接收到指示数据的车辆10的加热器控制部20c以成为指示数据所包含的目标值QHTtgt的方式控制对电加热器11f的通电量QHT。
上述的本公开的第一至第三实施例的加热器控制部20c在电加热器11f工作时,将对电加热器11f的每单位时间的通电量QHT维持为恒定量QHT1(图7、图11)。与此相对,本公开的第四实施例的加热器控制部20c根据从车辆10到边界GF的距离D来变更通电量QHT。
在距离D长时,车辆10远离边界GF,车辆10驶出到低排放区LEZ外的可能性低。与此相对,在距离D短时,车辆10靠近边界GF,车辆10驶出到低排放区LEZ外的可能性高。因此,在本公开的第四实施例中,如图18所示,与距离D短时相比,在距离D长时,目标通电量QHTtgt减少。其结果是,电力被有效利用。
即,在图19所示的例子中,在时间tc1之前判定为车辆10处于低排放区LEZ的内侧区域INA内,此时使电加热器11f的工作停止(通电量QHT=0)。接着,当在时间tc1判定为车辆10进入到出口区域EXA内时,使电加热器11f工作(QHT>0)。在该情况下,通电量QHT随着距离D变短而变多。接着,当在时间tc2判定为车辆10驶出了低排放区LEZ时,维持电加热器11f的工作状态。
图20示出了本公开的第四实施例中的用于执行车辆10中的控制的例程。对与图12所示的例程的不同点进行说明,在图20所示的例程中,在步骤103中,当接收到包含工作指示和目标通电量QHTtgt的指示数据时,接着进入步骤105a,以使通电量QHT成为目标通电量QHTtgt的方式使电加热器11f工作。
图21示出了本公开的第四实施例中的用于执行服务器30中的控制的例程。对与图16所示的例程的不同点进行说明,在图21所示的例程中,在步骤203中判定为车辆10处于出口区域EXA内时,接着进入步骤204a,计算目标通电量QHTtgt。在接下来的步骤204b中,创建包含工作指示和目标通电量QHTtgt的指示数据。接着进入步骤206。
在本公开的第四实施例中,通电量决定部40c设置于服务器30。在另一实施例中,通电量决定部40c设置于车辆10,由车辆10进行目标通电量QHTtgt的计算。在该情况下,从服务器30向车辆10发送距离D。或者,从服务器30向车辆10发送低排放区LEZ(边界GF)的位置信息,在车辆10中计算距离D。
接着,参照图22至图27来说明本公开的第五实施例。本公开的第五实施例与本公开的第四实施例在如下方面不同。即,如图22所示,本公开的第五实施例的车辆10的电子控制单元20具备引导部20e。引导部20e控制HMI18,来向车辆10的乘员提示或通知新的目的地。通过车辆10的乘员使车辆10朝向该目的地,将车辆10向该目的地引导。在车辆10为自动驾驶车辆的情况下,通过车辆10的自动驾驶功能使车辆10朝向该目的地,由此向该目的地引导。
另外,在本公开的第五实施例中,如图23所示,服务器30的电子控制单元40具备限制部40d和目的地决定部40e。限制部40d根据基于车辆10的蓄电池13的SOC决定的可利用电能量QEavl,限制电加热器11f的工作。目标决定部40e基于可利用电能量QEavl来决定车辆10的新的目的地。
本公开的第五实施例的可利用电能量QEavl由当前的SOC相对于上述的设定SOC的超出量(当前的SOC-设定SOC)表示。若考虑到当SOC变得低于设定SOC时运转模式从EV模式切换到HV模式的情况,则本公开的第五实施例的可利用电能量QEavl可以认为是在将运转模式保持为EV模式的状态下能够从蓄电池13获取的电能量。在另一例中,可利用电能量QEavl由当前的SOC相对于SOC的下限值的超出量表示。另外,下限值是在SOC低于下限值时SOC的恢复变得显著困难那样的SOC。
若将催化剂11e处于活化状态且车辆10以EV模式驶出低排放区LEZ所需的电能量称为必要电能量QEreq,则在可利用电能量QEavl比必要电能量QEreq少时,若使电加热器11f工作,则供车辆10以EV模式在低排放区LEZ内移动的电能量有可能不足,特别是有可能无法驶出低排放区LEZ。
因此,在本公开的第五实施例中,在判定为车辆10处于出口区域EXA内时,在判定为可利用电能量QEavl比必要电能量QEreq少时,与判定为可利用电能量QEavl比必要电能量QEreq多时相比,对电加热器11f的通电量变少、即电加热器11f的工作被限制。在一例中,对电加热器11f的通电量为0,电加热器11f停止工作。其结果是,确保了用于在低排放区LEZ内使车辆10以EV模式行驶的电能。
即,如图24中QE1所示,在可利用电能量QEavl比必要电能量QEreq多时,与本公开的第四实施例同样地,使电加热器11f工作。
与此相对,如图24中QE2、QE3、QE4所示,在可利用电能量QEavl比必要电能量QEreq少时,限制部40d创建包含停止指示的数据,并发送到车辆10。其结果是,电加热器11f停止工作。
另外,本公开的第五实施例的目的地决定部40e在可利用电能量QEavl小于必要电能量QEreq时(QE2、QE3、QE4),决定与可利用电能量QEavl相应的新的目的地,并创建与新的目的地相关的数据(包含新的目的地的位置、从当前位置到新的目的地的路线等),与停止指示一起发送到车辆10。车辆10的引导部20e在接收到新的目的地时,通过HMI18向车辆10的乘员通知新的目的地。
在本公开的第五实施例中,首先,计算在不使电加热器11f工作的情况下车辆10以EV模式到达低排放区LEZ内的充电设备所需的充电必要电能量QEchg。该充电必要电能量QEchg例如基于从车辆10的当前位置到充电设备的距离、车辆10的每单位行驶距离的消耗电能量等来计算。接着,如图24中QE2所示,当判定为可利用电能量QEavl比充电必要电能量QEchg多时,将该充电设备设定为新的目的地。其结果是,如图25中虚线所示,车辆10被向充电设备CS引导。因此,通过由充电设备CS进行外部充电,车辆10能够以EV模式行驶到低排放区LEZ外。另外,充电设备CS例如是充电必要电能量QEchg最小的充电设备。
另外,在本公开的第五实施例中,首先,计算在不使电加热器11f工作的情况下车辆10以EV模式驶出低排放区LEZ所需的区外必要电能量QEout。该区外必要电能量QEout例如基于从车辆10的当前位置到边界GF或普通区GEZ的距离、车辆10的每单位行驶距离的消耗电能量等来计算。接着,如图24中QE3所示,当判定为可利用电能量QEavl比区外必要电能量QEout多时,将低排放区LEZ外设定为新的目的地。其结果是,如图25中实线所示,车辆10被向低排放区LEZ外引导。其结果是,在低排放区LEZ内,不需要将运转模式切换为HV模式、即不需要使内燃机11运转。另外,在本公开的第五实施例中,即使催化剂11e为非活化状态也允许内燃机11的启动。因此,通过在低排放区LEZ外将运转模式切换为HV模式,能够确保车辆10的行驶所需的电能。另外,该情况下的到低排放区LEZ外的路径例如选择区外必要电能量QEout最小的路径。另外,在该情况下,在应启动内燃机11时,有时无法通过电加热器11f使催化剂11e处于活化状态,在该情况下,故障警告灯(MIL)点亮。
在图24所示的例子中,充电必要电能量QEchg比区外必要电能量QEout多。但是,也存在区外必要电能量QEout比充电必要电能量QEchg多的情况。总之,在本公开的第五实施例中,在进行可利用电能量QEavl是否多于区外必要电能量QEout的判断之前,进行可利用电能量QEavl是否多于充电必要电能量QEchg的判断。这样,降低了催化剂11e处于非活化状态并且内燃机11运转的可能性。
而且,在本公开的第五实施例中,如图24中QE4所示,当判定为可利用电能量QEavl比区外必要电能量QEout少时,将低排放区LEZ内的车辆10能够安全地停车的退避位置EV设定为新的目的地。其结果时,如图25中虚线所示,车辆10被向退避位置EV引导。因此,在低排放区LEZ内限制内燃机11的运转。另外,在本公开的第五实施例中,在该情况下,例如通过HMI18向车辆10的乘员通知车辆10以EV模式无法驶出到低排放区LEZ外的意思。
图26和图27示出了本公开的第五实施例中的用于执行服务器30中的控制的例程。对与图21所示的例程的不同点进行说明,在图26和图27所示的例程中,从步骤204a进入图27的步骤210,计算可利用电能量QEavl。在接下来的步骤211中,计算必要电能量QEreq。在接下来的步骤212中,判定可利用电能量QEavl是否为必要电能量QEreq以上。在QEavl≥QEreq时,接着进入步骤213,与步骤204b同样地,创建包含工作指示和目标通电量QHTtgt的指示数据。接着进入步骤206。
在QEavl<QEreq时,从步骤212进入步骤214,计算充电必要电能量QEchg。在接下来的步骤215中,判定可利用电能量QEavl是否为充电必要电能量QEchg以上。在QEavl≥QEchg时,接着进入步骤216,创建包含停止指示和与作为新的目的地的充电设备CS相关的数据的指示数据。接着进入步骤206。
在QEavl<QEchg时,从步骤215进入步骤217,计算区外必要电能量QEout。在接下来的步骤218中,判定可利用电能量QEavl是否为区外必要电能量QEout以上。在QEavl≥QEout时,接着进入步骤219,创建包含停止指示和与作为新的目的地的低排放区LEZ外相关的数据的指示数据。接着进入步骤206。
在QEavl<QEout时,从步骤218进入步骤220,创建包含停止指示和与作为新的目的地的低排放区LEZ内的退避位置EV相关的数据的指示数据。接着进入步骤206。
在本公开的第五实施例中,在QEchg>QEavl≥QEout时,使电加热器11f停止工作,并且将车辆10向低排放区LEZ外引导。在另一例中,使电加热器11f工作,并且将车辆10向低排放区LEZ外引导。在该情况下,如图24中dQE所示,能够向电加热器11f供给的电能量由可利用电能量QE3与区外必要电能量QEout之差表示。其结果是,即使催化剂11e不处于活化状态,催化剂11e的温度也升高。因此,此后,在内燃机11运转时,催化剂11e被迅速地活化。
另外,在本公开的第五实施例中,限制部40d设置于服务器30。在另一实施例中,限制部40d设置于车辆10,由车辆10判定是否应限制电加热器11f的工作。另外,在本公开的第五实施例中,目的地决定部40e设置于服务器30。在另一实施例中,目的地决定部40e设置于车辆10,由车辆10决定新的目的地。
但是,在本公开的第五实施例中,在判定为可利用电能量QEavl比充电必要电能量QEchg少时,车辆10有可能无法驶出到低排放区LEZ外(QEavl<QEout)。或者,即使车辆10能够驶出低排放区LEZ,催化剂11e也有可能不处于活化状态(QEavl<QEout)。
因此,在本公开的第五实施例中,在QEavl<QEchg时,进行可利用电能量QEavl的增大控制。在一例中,尽可能地限制由车辆10消耗的电能量。例如,用于空调、信息娱乐系统这样的车辆行驶之外的电能消耗量变少或为0。在另一例中,通过关闭车辆10的车窗等来降低车辆10的空气阻力。在另一例中,通过降低加速器灵敏度来限制车辆10的加减速的频度或幅度。其结果是,延长了车辆10能够行驶的距离。
在上述的本公开的各种实施例中,由服务器30进行车辆10是否处于低排放区LEZ内的判定。在另一实施例(未图示)中,车辆10的电子控制单元20具备位置判定部,该判断由车辆10进行。在该情况下,在一例中,低排放区LEZ的位置信息存储在车辆10内。在另一例中,低排放区LEZ的位置信息存储在服务器30内,车辆10从服务器30接收低排放区LEZ的位置信息,进行该判断。
在又一实施例(未图示)中,上述的本公开的实施例所包含的各种控制单独地或组合地实施。
- 混合动力车辆的再生电力量控制系统、混合动力车辆及混合动力车辆的再生电力量控制方法
- 混合动力车辆的DCDC输出电压控制方法及控制系统